



Machines 2026, 14(5), 546; https://doi.org/10.3390/machines14050546 (registering DOI) - 13 May 2026
Abstract
As is well known, vibration, especially ultra-low-frequency vibration, is harmful to machinery’s accuracy and service life and even human health. This paper experimentally validates vibration isolation technology for low-frequency applications based on quasi-zero stiffness (QZS) properties. Firstly, a platform for isolating low-frequency vibration,
[...] Read more.
As is well known, vibration, especially ultra-low-frequency vibration, is harmful to machinery’s accuracy and service life and even human health. This paper experimentally validates vibration isolation technology for low-frequency applications based on quasi-zero stiffness (QZS) properties. Firstly, a platform for isolating low-frequency vibration, referred to as LFVIP, is introduced, featuring a quasi-zero stiffness characteristic. Then, the dynamic stiffness of this platform is analyzed and established. Based on this analytical model, a solution for designing the platform to obtain the desired stiffness in the equilibrium state is suggested. Secondly, an experimental setup is established to verify the isolation performance of the platform under base displacement excitation. In addition, the isolation effectiveness of the LFVIP is compared with that of its linear counterpart (LC). The experimental results indicate that the LFVIP provides the starting isolation for effective isolation at approximately 2 Hz, while that of LC is around 6 Hz. Moreover, the vibration attenuation of the LFVIP is greater than that of the LC. Vibration isolation technology based on quasi-zero stiffness is superior to the LC, particularly in the low-frequency region. This work offers useful insights for the design of vibration isolators, suspension systems, and related applications, particularly by demonstrating how the superior vibration attenuation of the LFVIP can be leveraged to improve the performance of these systems.
Full article
(This article belongs to the Section Automation and Control Systems)
►
Show Figures
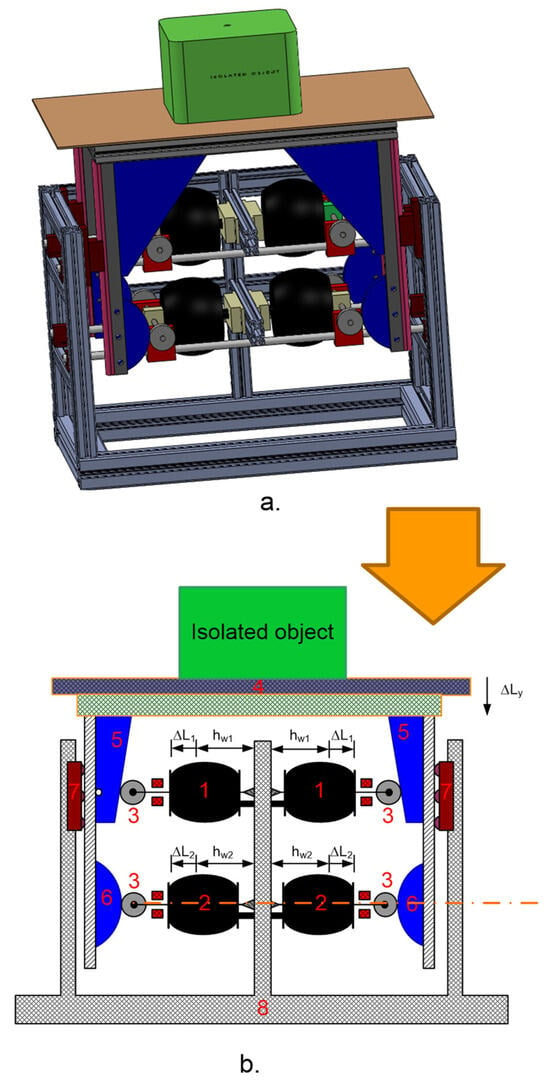
Figure 1





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}