- Article

Rationale for the Development of an Intelligent Digital Level Crossing Protection System Based on AI and Machine Vision: A Safety Analysis of Railway Crossings in the Republic of Kazakhstan
- Kanibek Sansyzbay,
- Yelena Bakhtiyarova and
- Akmaral Zhumagul
- + 3 authors
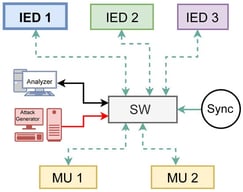
The article addresses the challenges of modernizing Kazakhstan’s railway infrastructure under conditions of technological dependence on foreign automation systems and obsolete relay-based equipment. These factors pose significant risks to economic and information security and limit the throughput capacity of level crossings. A digital system, KZ-DALCS-AI, is proposed, based on a multi-level safety architecture and the integration of artificial intelligence into monitoring and control processes. A key component is an obstacle detection and classification algorithm that considers object types (vehicles, humans and animals, foreign objects, and environmental factors) and enables intelligent real-time decision making using the KZ-ODC-AI controller with data from video surveillance, microwave sensors, and inductive loops. The system architecture, operational logic, and level crossing control algorithm are developed, including optimization of closing time by minimizing the deviation between calculated and actual values. The results of the performed calculations confirm the effectiveness of the proposed notification algorithm, ensuring the required level of safety while reducing unnecessary delays for road traffic. The implementation of the system improves throughput, reduces operational costs, enhances reliability, and minimizes the impact of the human factor.
5 May 2026
![Infrastructure of railway crossings on the railways of Kazakhstan [12].](https://mdpi-res.com/cdn-cgi/image/width=470%2Cheight=317/https://mdpi-res.com/automation/automation-07-00071/article_deploy/html/images/automation-07-00071-g001-550.jpg)