Abstract
Lumbar disc herniation is one of the primary causes of lower back pain, and its incidence has significantly increased with the development of industrialization. To assist in rehabilitation therapy, this paper proposes a flexible exoskeleton for active lumbar rehabilitation based on a 4-SPU/SP biomimetic parallel mechanism. By analyzing the anatomical structure and movement mechanisms of the lumbar spine, a four degree of freedom parallel mechanism was designed to mimic the three-axis rotation of the lumbar spine around the coronal, sagittal, and vertical axes, as well as movement along the z-axis. Using a 3D motion capture system, data on the range of motion of the lumbar spine was obtained to guide the structural design of the exoskeleton. Using the vector chain method, the display equations for the drive joints of the mechanism were derived, and forward and inverse kinematic models were established and simulated to verify their accuracy. The dynamic characteristics of the biomimetic parallel mechanism were analyzed and simulated to provide a theoretical basis for the design of the exoskeleton control system. A prototype was fabricated and tested to evaluate its maximum range of motion and workspace. Experimental results showed that after wearing the exoskeleton, the lumbar spine’s range of motion could still reach over 83.5% of the state without the exoskeleton, and its workspace could meet the lumbar spine movement requirements for daily life, verifying the rationality and feasibility of the proposed 4-SPU/SP biomimetic parallel mechanism design.
1. Introduction
Since the industrial revolution, modern production lines have become the mainstream mode of production, and in most industrial labor environments, high loads, long hours, and high frequency of bending are often required. Repetitive labor increases the risk of low back pain and lumbar disc herniation. In addition to monotonous and frequent work on assembly lines, there are also many occupations that require manual lifting, which can cause a large number of workers to strain their lower back muscles, which in turn causes spinal instability, leading to lumbar spine disorders. The Global Burden of Disease Study and Analysis 2017 reported that low back pain has become one of the top four leading causes of disability, as well as one of the top three causes of non-fatal health damage globally [1]. The Journal of the British Medical Association published a study stating that lower back pain is the leading cause of long-term disability globally, and that the prevalence of lower back pain over a person’s lifetime is 58–84% [2].
With the rapid development of intelligent robot technology, numerous robot assisted systems have been applied in the field of medical rehabilitation. For example, ReWalk (Yokneam Ilit, Israel) and Ekso [3] from the United States, Locomat from Hocoma AG in Volketswil, Switzerland [4], and RUBERT [5] developed by Arizona State University are typical lower or upper limb exoskeleton rehabilitation robots that mainly provide support and training functions for the limbs [6]. In addition, Stefano et al. from the Italian Institute of Advanced Robotics Technology have developed a lumbar exoskeleton for assisting manual operation [7], which uses motor-driven actuators for active support and proposes a design method for parallel elastic actuators to adapt to asymmetric torque output required for different tasks [8]. The SPEXOR project, funded by the European Union, has developed a passive flexible lumbar exoskeleton for the prevention of lower back pain [9]. Hara and Sankai from Tsukuba University in Japan designed the lumbar support assist device HAL, which effectively reduces the burden on the waist [10,11]. The AWN-03 [12] launched by Panasonic adopts a small high-power motor and a compact gear transmission structure, and it uses carbon fiber and resin materials to reduce equipment weight [13]. The hydraulic lumbar traction device manufactured by Zhejiang Bo’an Medical Devices Technology Co., Ltd. (Hangzhou, China) in China is used for lumbar decompression therapy [14]. The Muxin Du team designed a lower limb rehabilitation robot with an assisted standing function [15], and the Lisheng Wang team combined expansion and contraction PAM to develop a soft actuator for lumbar support, effectively reducing lumbar compression force [16]. Despite the continuous advancement of related research, the current active exoskeleton system for lumbar rehabilitation is still relatively limited. Existing commercially available products, such as the portable pneumatic traction device Disk Dr. from Changrui Medical in South Korea and the hydraulic lumbar traction device from Boan Medical in China [17], respectively, achieve lumbar decompression through abdominal pressure or hydraulic support, but the auxiliary effect is weak or the support method is single in nature. In contrast, although large lumbar traction devices used in clinical practice have significant therapeutic effects, they are not suitable for home use due to their large size, high cost, and complex operation.
We have collaborated with orthopedic surgeons with years of clinical experience to develop a non-customized active lumbar rehabilitation exoskeleton to replace traditional traction therapy. This exoskeleton is mounted between the ribs and pelvis, dynamically unloading lumbar spine load as the body posture changes and providing programmable support and assistance to the lumbar spine. Most DHL patients undergoing conservative treatment can wear it during daily activities and work, replacing traditional therapies. For patients recovering from lumbar spine surgery, it can restrict movement to stabilize the lumbar spine during the early rehabilitation phase, gradually increasing the range of motion as rehabilitation progresses, enabling active training, and preventing muscle atrophy.
2. Biomimetic Design of Flexible Exoskeleton for Lumbar Rehabilitation
Human–machine coupling is the primary distinguishing feature of flexible exoskeletons compared to other intelligent robots, requiring the flexible exoskeleton to seamlessly follow the wearer’s body posture changes and achieve integrated movement with the wearer. Therefore, the structural design of the lumbar rehabilitation flexible exoskeleton (LRFE) must adhere to anthropomorphic biomimetic principles. Based on a comprehensive analysis of the biomechanical and anatomical structure and movement mechanisms of the human lumbar spine, research was conducted on the loading and pressure-relief mechanisms of the lumbar spine. Subsequently, biomimetic structural configurations were developed according to the design requirements of the LRFE. A degree of freedom analysis was then performed on the proposed biomimetic structures. Experimental analysis of the range of motion of the waist was conducted using a 3D motion capture system to provide a basis for structural design. Finally, the detailed structural design of the LRFE was completed, and a prototype was fabricated.
2.1. Analysis of the Mechanism of Human Lumbar Spine Movement
Based on the curvature and morphology of the relevant vertebrae, the spine is subdivided into four regions: the cervical spine, thoracic spine, lumbar spine, and sacrum [18]. The movement of the lumbar spine is generated by the combined action of the five lumbar vertebrae and intervertebral discs, which form multiple lumbar segments, along with the surrounding muscle groups and nerves in the lumbosacral region. Figure 1 shows the human spine and lumbar spine.
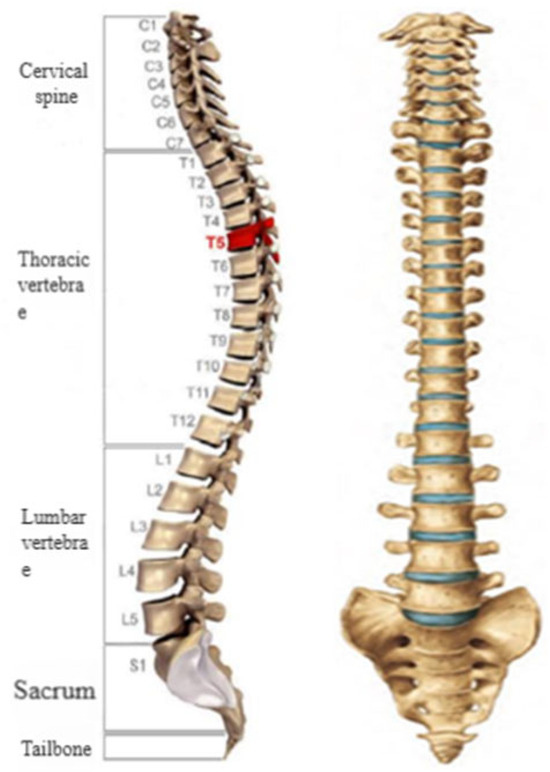
Figure 1.
Human spine and lumbar vertebrae.
The movement of the lumbar vertebral joints exhibits distinct coupling characteristics, manifested as coupling between translational movements, between rotational movements, and between translational and rotational movements in different directions [19]. The lumbar vertebral joint is a virtual joint created to analyze lumbar motion, capable of three-axis rotation around the coronal, sagittal, and vertical axes, i.e., flexion/extension, lateral bending, and rotation. Under traction, the lumbar vertebrae can slightly extend along the vertical axis; thus, the lumbar vertebral joint also possesses a degree of freedom for longitudinal translational movement. The wide range of motion exhibited by the human lumbar spine is the result of each motion segment contributing collectively along its length [20].
2.2. Analysis of Lumbar Spine Loading and Decompression Mechanisms
The compressive stress on the lumbar vertebrae is the highest among all vertebrae in the spine. The load on the lumbar vertebrae during daily activities has been modeled and estimated by many people through in vitro studies, but no studies have been found that directly measure this load in vivo, mainly due to concerns that implanting measurement devices could damage the spine. It was not until 1999 that Wilke H J et al. implanted pressure sensors in the L4/L5 intervertebral disc and detailed the wide range of compressive loads on the lumbar spine during daily activities in a subject [21], as shown in Table 1. Their study indicated that during supine sleeping at night, when the intervertebral disc rehydrates, the nominal pressure increases from 0.1 MPa to 0.24 MPa.

Table 1.
Pressure on the lumbar intervertebral disc L-4/L-5.
The analysis of lumbar spine loading is shown in Figure 2. The pressure C acting on the L5/S1 intervertebral disc increases with the increase in muscle force F and the vertical downward force W of the upper body weight. Additionally, the abdominal pressure component P helps reduce the pressure on the intervertebral disc, with force P originating from the increase in abdominal pressure. Intra-abdominal pressure is caused by the concentric contraction of the diaphragm, pelvic floor, and muscles surrounding the abdominal cavity. One of its longitudinal components reduces the value of lumbar pressure C.
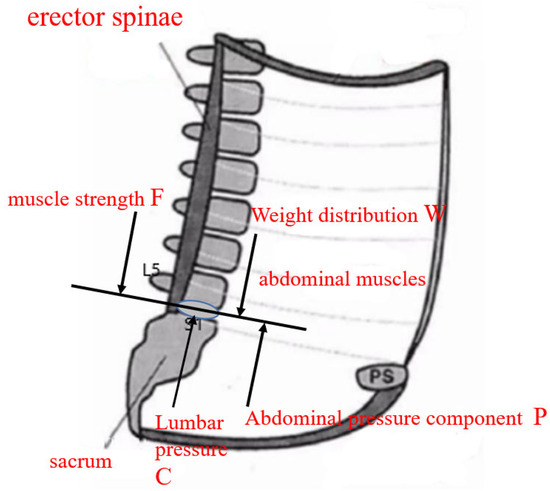
Figure 2.
Lumbar spine force analysis.
Therefore, lumbar spine pressure can be alleviated through two interrelated support mechanisms: increasing intra-abdominal pressure and reducing the activity of lumbar postural muscles [22]. Intra-abdominal pressure can be increased using compression garments or waist belts with tightening force; however, to achieve significant effects, these devices must be worn very tightly, which may cause discomfort and hinder lumbar spine movement during flexion and other activities [23]. Therefore, increasing intra-abdominal pressure can only serve as an auxiliary measure for lumbar spine decompression. Reducing lumbar muscle activity requires decreasing the strength of these muscles. The most direct and effective method is to apply external force to the upper body to provide support, thereby releasing lumbar pressure [24]. Therefore, the design of lumbar rehabilitation flexible exoskeletons primarily achieves effective lumbar decompression by providing external assistance to support the weight of the upper body.
2.3. Lumbar Rehabilitation Flexible Exoskeleton Bionic Mechanism Configuration
Currently available exoskeleton rehabilitation robots primarily employ serial mechanisms, where the joints in a serial mechanism are not mutually coupled. In contrast, the movement of the human lumbar spine exhibits typical coupling characteristics. The lumbar vertebral joints of the human body generate coordinated movement through the combined traction of the surrounding muscle groups. This single-joint, multi-degree of freedom movement characteristic is analogous to the motion mechanism of a parallel mechanism. Therefore, this paper employs a parallel mechanism to match the degrees of freedom and range of motion of the human lumbar vertebral joints, with the mechanism configuration possessing certain biomimetic significance. Additionally, parallel mechanisms are compact, rigid, and capable of bearing heavy loads. As a lumbar rehabilitation exoskeleton, they can withstand the weight of the human upper body and external loads, thereby meeting the requirements of structural design.
Based on the motion analysis of the human lumbar spine, lumbar motion can be abstracted as a joint composed of a ball joint and a sliding joint. A 4-SPU/SP parallel mechanism, consisting of four SPU branches composed of a ball joint S, a sliding joint P, a Hooke joint U, and one SP branch mimicking the human lumbar spine, is used to mimic lumbar motion, as shown in Figure 3. The parallel mechanism has four degrees of freedom, enabling three-axis rotation around the coronal, sagittal, and vertical axes, as well as movement along the z-axis. This allows the lumbar spine to perform flexion and extension, lateral bending, and vertical rotation and to slightly extend longitudinally under traction. The upper platform of the parallel biomimetic mechanism is fixed to the ribs via flexible straps, while the lower platform is fixed to the human pelvis via flexible straps. Four miniature electric actuators drive the parallel mechanism to support the weight of the human upper body, thereby relieving lumbar spine pressure and providing programmable corrective support torque that can be controlled over time and position. This biomimetic design allows patients to wear the device comfortably, enabling free movement without affecting daily activities. It also enables active rehabilitation training of lumbar muscles through three rotational movements, thereby enhancing lumbar spine stability.
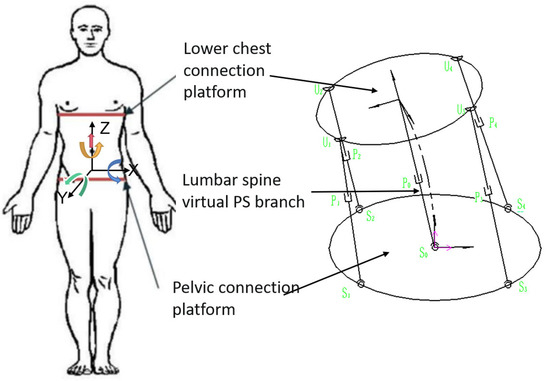
Figure 3.
Schematic diagram of the 4-SPU/SP parallel mechanism with biomimetic configuration.
2.4. Degrees of Freedom Analysis of a BPM for Lumbar Rehabilitation
The structural principle of the l LRFE 4-SPU/SP biomimetic parallel mechanism (BPM) is shown in Figure 4, where U represents the Hooke joint, P represents the moving joint, and S represents the ball joint. It includes a moving platform connected to the lower thoracic region, a fixed platform connected to the pelvis, four SPU drive branches connecting the two platforms, and a virtual SP follower branch in the middle. This section primarily analyzes the degrees of freedom of the BPM to verify whether it can achieve the four degrees of freedom of lumbar spine movement.
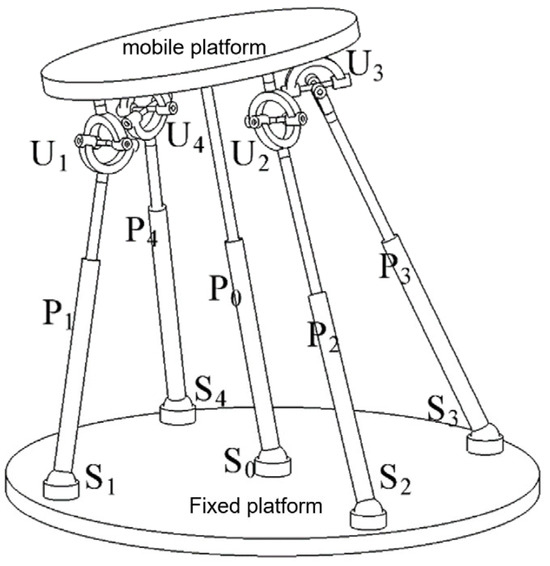
Figure 4.
4-SPU/SP bionic parallel mechanism structural principle diagram.
The LRFE biomimetic parallel mechanism adopts a multi-ring closed-chain structure and can be analyzed as a standard rigid parallel mechanism. As shown in Figure 4, the motion platform of the BPM is bound to the lower ribs and is considered the moving platform, while the lower platform of the parallel mechanism is bound to the pelvis and is considered the fixed platform. Four SPU-type drive branches are connected to the S and U points of the upper and lower platforms, respectively, with the SP branch terminals constrained to the motion platform. Solving for degrees of freedom is an important component of parallel mechanism analysis, and there are currently multiple solution methods. This paper uses the modified Kutzach Grubler degree of freedom calculation formula to calculate the degrees of freedom of this BPM.
where M represents the degree of freedom of the mechanism; d represents the order of the mechanism, d = 6 − λ; λ represents the number of public constraints; n denotes the number of components including the frame; g denotes the number of moving joints; and indicates the number of degrees of freedom for the i-th kinematic pair. indicates the number of redundant constraints in a multi-ring parallel mechanism after removing common constraints, and ζ represents the local degree of freedom existing in the mechanism. In the 4-SPU/SP BPM, the common constraint is 0, the mechanism order is d = 6, and the number of components is n = 11. It has 4 universal pairs, 5 ball pairs and 5 moving pairs, g = 14, Redundancy constraint v = 0, and there is no local degree of freedom for the ups drive branch chain and SP driven branch chain, ζ = 0. Substituting the analyzed data into Formula (2) yields
From this, we can see that the number of degrees of freedom of the lumbar rehabilitation flexible exoskeleton BPM is 4. According to the constraint force/torque observation method, there are two mutually perpendicular constraint forces through the ball joint in the constraint follower SP branch of the BPM. Therefore, the independent degrees of freedom of the BPM are movement along the z-axis and rotation around the x-axis, y-axis, and z-axis, compliant with the three-axis rotation of the lumbar spine around the coronal axis, sagittal axis, and vertical axis, as well as movement along the z-axis, i.e., the lumbar spine performs flexion and extension, lateral bending, and vertical rotation movements, and it can slightly extend longitudinally under traction.
3. Kinematics Analysis of Flexible Exoskeleton for Lumbar Spine Rehabilitation
Institutional kinematics studies the motion of objects rather than the forces that produce these motions [25] and is divided into forward kinematics and inverse kinematics. Forward kinematics refers to solving for the position and orientation of the output member when the position of the input member is known, which is called the forward solution of kinematics. Inverse kinematics refers to solving for the position of the input member when the position and orientation of the output member are known, which is called the inverse solution of kinematics [26]. In the motion control of a flexible exoskeleton for lumbar rehabilitation, it is necessary to calculate the rod length of the parallel mechanism driving the pushrod using the virtual exoskeleton dynamic platform’s pose, as well as to solve for the exoskeleton dynamic platform’s pose using the rod length of the parallel mechanism driving the pushrod. Therefore, a kinematic analysis of the biomimetic parallel mechanism is required.
3.1. Kinematic Position Inverse Solution of BPMs
The LRFE uses an IMU placed on the human back to detect and estimate the posture of the human waist. As the position and orientation of the BPM motion platform are known, the rod length of the driving moving joint is solved, i.e., the inverse kinematics solution. The BPM of the LRFE consists of four SPU-driven branches and one virtual SP-constrained branch, with the constrained branch perpendicular to the upper platform. The upper platform is denoted as m and the lower platform as B. Both the upper and lower platforms are rectangular. The endpoints of the lower platform are denoted as , and the endpoints of the upper platform are denoted as . The structure of the 4-SPU/SP biomimetic parallel mechanism is simplified, and a coordinate system is established as shown in Figure 5. A fixed coordinate system {O} = {O-XYZ} is established with the center of the spherical joint of the constrained branch as the origin. The x-axis is parallel to S1S2, with its positive direction pointing toward the S1 side. The z-axis passes through the origin, is perpendicular to the fixed platform plane, and points upward. The y-axis follows the right-hand screw rule. Similarly, a moving coordinate system {p} = {p-xyz} is established with the center of the moving platform as the origin. Its x-axis is parallel to U1U2, with its positive direction pointing toward the U1 side. The z-axis is perpendicular to the plane of the moving platform and points upward. The y-axis follows the right-hand screw rule. A branch coordinate system {Si} = {Si-xiyizi} is established with the base endpoint Si as the coordinate origin, where the xi axis is parallel to x, the zi axis is parallel to the z axis, and the yi axis follows the right-hand screw rule. To describe the posture of the branches, a center-of-mass coordinate system {Ûi} = {Ui-uipiwi} is established on each branch with the center of mass of each branch as the origin. The pi axis is parallel to the xi axis, the wi axis is collinear with the branch axis, and the ui axis satisfies the right-hand spiral rule.
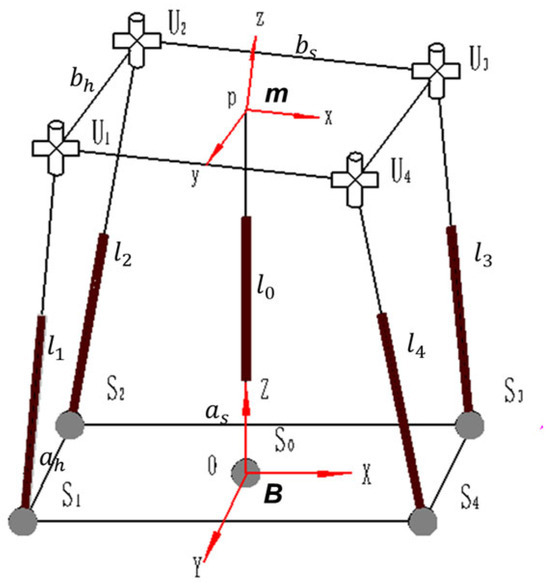
Figure 5.
Schematic diagram of the 4-SPU/SP BPM and coordinate system.
The four drive branches of the BPM of the LRFE all use linear electric pushrods to achieve the moving joints. The lengths of the four actuators serve as the input variables of the exoskeleton system, denoted as . The output variables of the system are the position and attitude of the moving platform, specifically the roll angle around the x-axis, the pitch angle around the y-axis, and the yaw angle around the i-axis of the moving platform, denoted as γ, β, and α, respectively. The position and attitude parameters of the moving platform can be represented as q = [pz, α, β, γ]T, where pz is the z-axis coordinate of the origin p of the moving coordinate system {p-xyz} in the fixed coordinate system {O-XYZ}, and its value is the initial rod length of the virtual constraint branch SP, determined by the vertical dimension between the wearer’s lower chest circumference and hip circumference. The length and width of the moving platform are denoted by bh and bs, respectively, while the length and width of the fixed platform are denoted by ah and as, respectively. Their values are determined by the wearer’s lower chest circumference and hip circumference.
As described in the schematic diagram of the coordinate system of the BPM in Figure 5, the coordinates of each endpoint Si of the fixed platform B in the fixed platform coordinate system {O-XYZ} can be obtained as follows:
The Euler transformation method is used to represent the position and orientation of the BPM of the LRFE. Let the origin p of the moving coordinate system {p-xyz} be the position vector p = [px, py, pz] relative to the fixed coordinate system {O}. The attitude of the motion platform is expressed by the z-y-x Euler angles, and the rotation matrix of the motion platform in the fixed coordinate system {O} is
In the formula .
The position vectors of the endpoints Ui of the BPM moving platform m in the moving coordinate system {p-xyz} are
According to Equations (4) and (5), the position vector of point Ui in the fixed coordinate system {O} is
The initial rod length of the constrained branch SP can be determined based on the initial distance between the moving platform and the fixed platform, so that the z-axis coordinate pz of the origin p of the moving coordinate system in the fixed coordinate system {O-XYZ} can be known. According to reference [24],
According to , we can obtain the expressions for the lengths of each drive branch rod:
3.2. Kinematic Position Solution of BPMs
The kinematic position solution of the LRFE is to solve for the position and orientation q = [p, α, β, γ]T of the moving platform, given the length of the drive branch electric pushrod. A common method for solving the kinematics of parallel mechanisms is to use a numerical solution based on a set of algebraic equations. The kinematic position inverse solution described above yields a set of nonlinear equations:
In the equation, denotes the actual length of the pushrod given, and li denotes the expression for the length of the drive rod containing the moving platform pose parameters q = [p, α, β, γ]T. Solving nonlinear systems of equations involving trigonometric functions is usually quite difficult. This paper uses Newton’s iterative search numerical method to find the final solution to the system of equations . According to Newton’s iterative method, the iterative formula is as follows:
where represents the incremental pose parameters of the moving platform, defined as follows:
where denotes the matrix of partial derivatives of the estimated bias with respect to the pose parameters q.
Writing the above formula in matrix form, we obtain
The pseudo-inverse solution can be expressed as
Among them, A+ represents the left pseudoinverse solution of A. The calculation formula of A+ is as follows:
When solving the problem, first take the initial estimated value of the moving platform’s pose parameters as q_0 = [p0, α0, β0, γ0]T, calculate the parameter increments using Equation (15), and then iterate continuously using the Newton iteration formula until ∆q_k < ξ, where ξ is the iteration error tolerance. At this point, an approximate value for the forward kinematics of the LRFE biomimetic parallel mechanism can be obtained.
3.3. Numerical Simulation Verification of Kinematic Models
Numerical simulation using MATLAB (2022 Version) programming was used to verify the correctness of the forward and inverse motion models of the 4-SPU/SP BPM of the LRFE. The numerical simulation used the lower chest circumference, hip circumference, and height dimensions of the author of this paper as the geometric parameters of the model, as shown in Table 2.
Table 2.
4-SPU/SP bionic parallel mechanism simulation geometric parameters.
First, the four pose angles of the LRFE biomimetic parallel mechanism motion platform are provided. The inverse kinematics model is used to calculate the lengths of the four drive pushrods in the LRFE system at each pose using MATLAB programming. The results are shown in Table 3. Next, using the lengths of the drive pushrods obtained for each posture as known conditions, the forward kinematic model of the LRFE biomimetic parallel mechanism established in the previous section is programmed in MATLAB to calculate and solve for the posture of the motion platform. The results are shown in Table 4.
Table 3.
Kinematic inverse solution simulation results.
Table 4.
Kinematic solution simulation results.
By comparing the posture input of the kinematic inverse solution model with the output results of the kinematic direct solution model, it can be seen that under four postures, the error of the kinematic direct and inverse solution model solutions of the LRFE motion platform is 0.0001 rad, which is within the acceptable error range, thereby verifying the correctness of the kinematic position direct and inverse solution model established in the above text.
4. Dynamic Analysis of Flexible Exoskeleton for Lumbar Rehabilitation
In terms of the flexible exoskeleton for lumbar rehabilitation, it is not only necessary to provide patients with stable lumbar decompression assistance but. more importantly, it must ensure patient safety. Therefore, real-time control of the thrust magnitude of the electric pushrod is of great significance. The flexible exoskeleton for lumbar rehabilitation uses inverse dynamics to solve the driving force by the electric pushrod based on the target position to be achieved and then controls the motor output according to the required force or torque to realize real-time control of the exoskeleton robot [27]. This essay will adopt the virtual work principle method to carry out dynamic modeling of the 4-SPU/SP bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation and use MATLAB combined with ADAMS to simulate its dynamic model to verify its correctness.
4.1. Kinematic Analysis of Bionic Parallel Mechanisms: Velocity and Acceleration
(1) Solution for Velocity and Acceleration of Moving Platform in Bionic Parallel Mechanism
Let v and ω denote the linear velocity vector of the reference point at the center of the moving platform and the angular velocity vector of the moving platform, respectively, for the bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation. The velocities of each driving branch can be expressed as
where vi is the linear velocity vector of the hinge center point on the moving platform, δi is the unit vector along the branch direction, and di is the position vector from the reference point of the moving platform to the hinge center point of the moving platform. Therefore, the driving velocities of each driving branch can be organized into a matrix form as
where Jm represents the Jacobian matrix of the flexible exoskeleton for lumbar rehabilitation. As shown in (23), the pose of the moving platform of the bionic parallel mechanism of the LRFE is a function of the mechanism’s independent variables q = [p, α, β, γ] T. Since the end-effector of the constraint branch SP is fixedly connected to the moving platform, it follows that
According to Equation (24), the linear velocity of the moving platform of the bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation can be expressed by the independent variable parameters of the mechanism as
In the formula
Similarly, the angular velocity of the moving platform of the 4-SPU/SP bionic parallel mechanism can be expressed as the linear superposition of the platform’s angular velocities about its variables, which can be written as
wherein
It can be obtained from Equations (21) and (22) that
Substituting Equation (23) into Equation (19), the expression for the velocity inverse solution of the bionic parallel mechanism’s moving platform can be obtained as follows.
In the equation, JD is a 4 × 4 velocity Jacobian matrix, and Formula (24) is the mapping model from end-independent velocity to drive velocity. Combining Equations (21) and (22), the linear and angular accelerations of the moving platform in the 4-SPU/SP bionic parallel mechanism can be derived as follows (detailed expressions are provided in Ref. [28]):
(2) Solution for Velocity and Acceleration of Each Branch in Bionic Parallel Mechanism
To construct an accurate dynamic model of the bionic parallel mechanism for the flexible exoskeleton in lumbar rehabilitation, the influence of branch velocities cannot be ignored. The following derives the velocities and accelerations of each branch in the bionic parallel mechanism.
Let and be the angular velocities and angular accelerations of each branch of the 4-SPU/SP bionic parallel mechanism, respectively. The constraint branch SP is fixedly connected to the moving platform, and its angular velocities are consistent. Therefore, there is
Differentiating Equation (27) gives the angular acceleration of the SP constraint branch as
According to Ref. [28], the angular velocity of the driving branch SPU can be expressed as
Differentiating it yields the angular acceleration of the SPU branch as
For the bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation, let rsi be the length from the center of mass of the swing link of branch i to the starting end of the branch, and let rti be the length from the center of mass of the telescopic link of branch i to the terminal end of the branch. Let vsi and asi be the velocity and acceleration of the center of mass of the swing link, and vti and ati be the velocity and acceleration of the center of mass of the telescopic link. Obviously, the swing link and the telescopic link have the same angular velocity and angular acceleration. According to Ref. [28], for each of the above branches, the velocity of the center of mass of the swing link can be expressed as
Thus, it can be obtained that
The linear acceleration of the center of mass of the swing link for each branch is
According to Ref. [28], the velocity of the center of mass of the telescopic link for each branch can be expressed as
Thus, it can be obtained that
The acceleration of the center of mass of the telescopic link for each branch can be expressed as
4.2. Dynamic Model of Bionic Parallel Mechanism
Let G0, f0, and n0 denote the gravity vector, inertial force, and inertial moment of the moving platform of the bionic parallel mechanism for the flexible exoskeleton in lumbar rehabilitation. The moving platform includes the upper part of the human body, and m0 represents the mass of the moving platform of the bionic parallel mechanism, which can be approximated as the mass of the upper body (approximately two-thirds of the human body weight). Let GBi, fBi, and nBi be the gravity vector, inertial force, and inertial moment of the swing link of the electric pushrod, and let Gmi, fmi, and nmi be the gravity vector, inertial force, and inertial moment of the piston rod. Here, mBi and mmi are the masses of the swing link and telescopic link, respectively.
where , and are the inertial matrices of the parallel mechanism-based platform, the swing rod, and the telescopic rod with respect to the centroid coordinate system, respectively. is the rotation matrix of the i-drive branched centroid conjoined coordinate system relative to the fixed coordinate system. In this study, the influence of friction is not considered, and the inertia parameters are measured by Solidworks software according to the model. According to the virtual work principle [28], the sum of the external force/moment, inertial force/moment and driving force of each component of the parallel robot is zero; therefore, the dynamic equation of the bionic parallel mechanism of the flexible exoskeleton for lumbar spine rehabilitation can be described as
wherein is the vector composed of driving forces in the 4-SPU/SP bionic parallel mechanism. Substituting into Equation (38) gives
which is the dynamic model of the 4-SPU/SP bionic parallel mechanism.
4.3. Simulation Verification of the Dynamic Model
This essay uses MATLAB and ADAMS for joint dynamic model simulation to verify the correctness of the dynamic modeling of the bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation. First, under the set desired trajectory, MATLAB is used to programmatically calculate the driving forces of each electric pushrod through the dynamic model. Then, the driving forces calculated by MATLAB are input into ADAMS for dynamic simulation, and the motion trajectory of the moving platform is recorded. The correctness of the established dynamic model is verified by comparing the motion trajectories of each electric pushrod from the ADAMS simulation with the set desired trajectories input into MATLAB.
- (1)
- MATLAB Numerical Calculation of Dynamic Model
The mass m0 of the moving platform of the bionic parallel mechanism of the flexible exoskeleton for lumbar rehabilitation can be approximated as the mass of the human upper body, which is approximately two-thirds of the human body weight. Taking 50 kg, the masses of the swing link and telescopic link of the driving branch and are taken as 0.3 kg and 0.1 kg, respectively. The moments of inertia of the swing link and telescopic link are
The middle constraint branch is virtual for the human lumbar spine. The masses of the swing link and telescopic link are given as and n taking 1 kg and 0.5 kg, respectively. The moments of inertia of the swing link and telescopic link are
The geometric parameters of the bionic parallel mechanism for the flexible exoskeleton in lumbar rehabilitation are set according to Table 3, which is consistent with the kinematic simulation. The motion trajectory of the central point of the exoskeleton moving platform and the motion law of the platform’s attitude angles are given as
According to the derived formulas for angular velocity, angular acceleration, linear velocity, and linear acceleration of each branch in the bionic parallel mechanism, MATLAB is used to solve the displacement, velocity, and acceleration variation curves of each driving branch, as shown in Figure 6, Figure 7 and Figure 8. Substituting into Equation (37) allows us to calculate the gravity, inertial forces, and inertial moments of each branch and the moving platform. Then, substituting the results into Equation (39) solves the driving force variation law of each driving pushrod, as shown in Figure 9.
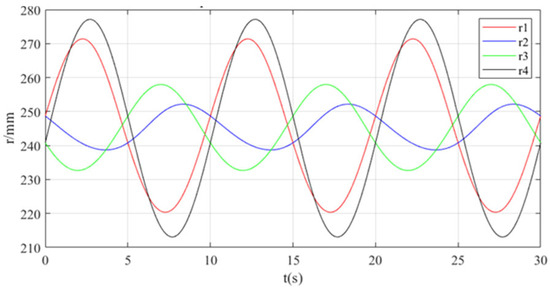
Figure 6.
Displacement–time curves of each driving branch.
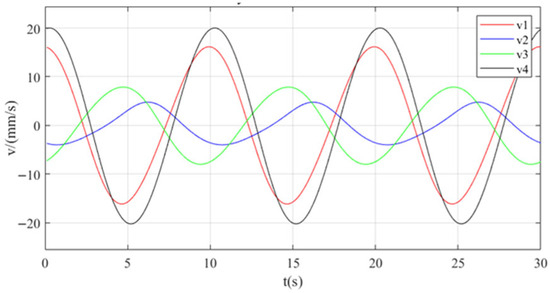
Figure 7.
Velocity–time curves of each driving branch.
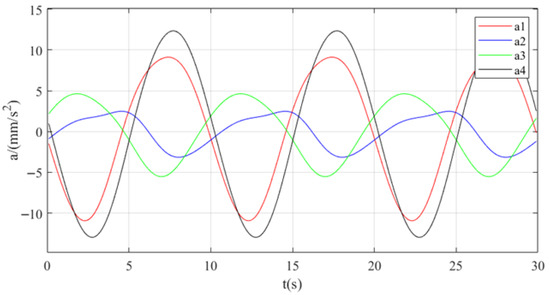
Figure 8.
Acceleration–time curves of each driving branch.
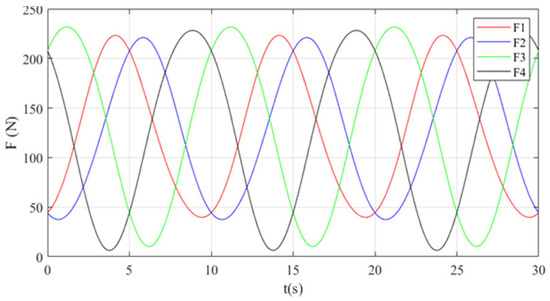
Figure 9.
Driving force–time curves of each driving branch.
- (2)
- ADAMS Dynamic Model Simulation
To verify the correctness of the established dynamic model of the bionic parallel mechanism, the ADAMS simulation software (2022 Version) is used to simulate the dynamic model of this parallel mechanism. The structural parameters of the model in ADAMS are set according to the parameters described in the numerical example of the dynamic model above, and the mass and inertia parameters of each rigid body are identical to those in the aforementioned example. The simulated structure of the 4-SPU/SP bionic parallel mechanism for the LRFE in the ADAMS software environment is shown in Figure 10. The driving forces calculated by MATLAB are input into ADAMS for dynamic simulation, and the motion trajectory of the moving platform is recorded as shown in Figure 11. The motion trajectories of each electric pushrod from the ADAMS simulation are compared with the set desired trajectories input into MATLAB, as shown in Figure 12.
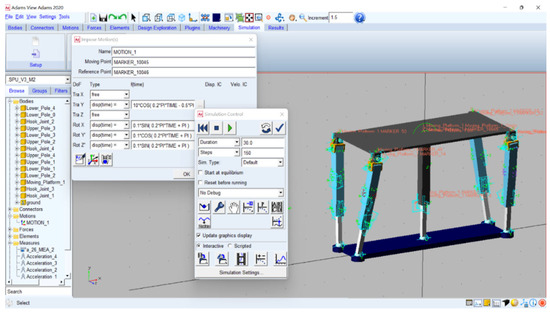
Figure 10.
The 4-SPU/SP bionic parallel mechanism in the ADAMS software environment.
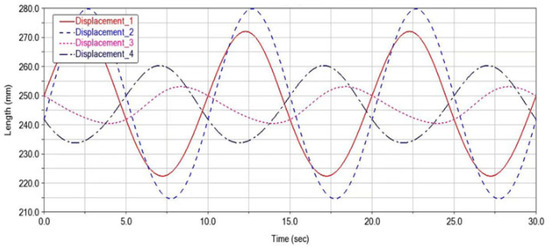
Figure 11.
Displacement–time curves of each driving branch from ADAMS simulation results.
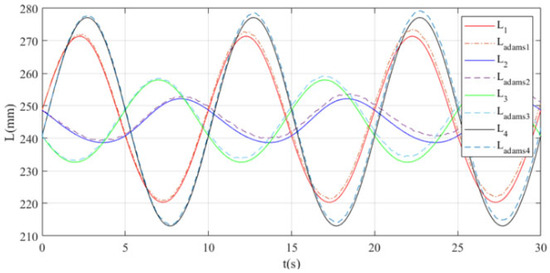
Figure 12.
Comparison of motion trajectories between ADAMS simulation results and preset desired trajectories for each electric pushrod.
Through the comparative analysis shown in Figure 12, the curves exhibit substantial consistency. Slight errors exist in the motion trajectories of each electric pushrod over time, with maximum errors occurring at peak positions during direction changes: 2.56 mm for pushrod 1, 2.83 mm for pushrod 2, 1.97 mm for pushrod 3, and 2.35 mm for pushrod 4. All maximum errors are within 3 mm, which falls within the allowable deviation range. This validates the rationality of the established dynamic model for the bionic parallel mechanism. In the control system design and actual hardware testing, a sliding mode controller based on a linear extended state observer (LESO) is employed. The extended state observer can estimate and compensate for model errors as total disturbances, enabling effective trajectory tracking and force control without requiring an exact mathematical model of system parameters. Therefore, experimental identification of the dynamic model parameters was not conducted here.
4.4. Dynamic Parameter Estimation of Driving Pushrods
By estimating the driving parameters of the bionic parallel mechanism for the LRFE, a basis can be provided for the selection and parameter determination of electric pushrods. The driving force/moment vector equation solved by the inverse dynamic model of the above Equation (39) can be transformed into the Lagrangian dynamic form equation:
is the driving force required to achieve the corresponding acceleration of the driving branch mechanism;
is the driving force required to counteract velocity-related factors such as the Coriolis force and centrifugal force;
G is the driving force required to counteract the gravitational factors of the driving branch mechanism.
When analyzing the driving force/moment of the electric pushrod, since the influence of centrifugal force and Coriolis force is negligible, the relationship between the driving force/moment of each electric pushrod in the driving branch and the angular acceleration of each driving branch in the generalized coordinate system can be obtained as
Therefore, the peak estimation model of each drive motor can be obtained as
By estimating the maximum angular acceleration of each driving branch as 0.002 m/s2 using the above Equation (43), the variation curves of driving force for each driving branch over time can be obtained as shown in Figure 13. It can be seen from the figure that the theoretical maximum driving force required for each drive motor is 245 N, which can be used as a reference for the selection of electric pushrods in the structural design.
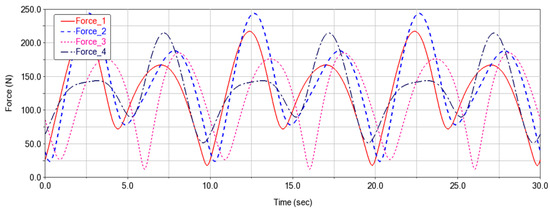
Figure 13.
Time variation curves of driving forces for each branch under maximum angular acceleration.
5. Structural Design and Prototype Development of Lumbar Rehabilitation Flexible Exoskeleton
5.1. Experiment on Maximum Daily Range of Motion of the Human Lumbar Region
To design a mechanical structure matching lumbar movements, it is necessary to analyze the natural movements of the human lumbar region and determine its maximum daily range of motion. This study uses a 3D motion capture system (Motion Capture Systems) equipped with 6 cameras from Qualisys (Sweden) to collect experimental data from a healthy male volunteer (height 175 cm, weight 70 kg) in the laboratory. Infrared reflective markers are placed on the subject’s anterior superior iliac spine, sacrum, sternoclavicular joint, and upper back. In the Motion Capture Systems interface, corresponding marker points are selected to construct rigid bodies for the pelvis and torso and establish corresponding coordinate systems. Considering occlusion, 4 torso markers are selected based on practical conditions to record their relative movements, as shown in Figure 14. The subject is required to perform lumbar movements at self-paced speeds in three anatomical planes (lateral flexion in the coronal plane, flexion–extension in the sagittal plane, and rotation in the transverse plane), moving the torso to the limit position as much as possible. Each action is repeated three times consecutively, and the range of motion of lumbar movements is calculated by reconstructing marker trajectories through the 3D motion capture system.
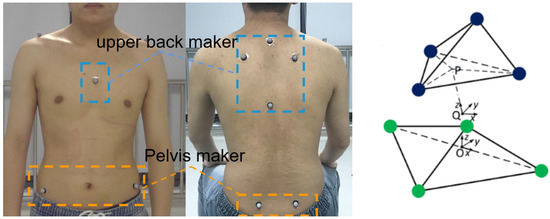
Figure 14.
Marker placement for lumbar motion analysis.
The experimental test data results of the maximum daily range of motion for human lumbar movement are shown in Table 5. The daily lumbar motion range of the healthy subject is approximately 60° for forward flexion, 15° for backward extension, 30° for left/right lateral flexion, and 20° for left/right rotation. The structural design of the LRFE in the next section will take these parameters as the workspace coverage target of the parallel mechanism. (If the normal range of lumbar spine movement is met, then the range of movement needs of lumbar rehabilitation patients must be met).
Table 5.
Calculation of lumbar motion range test data.
5.2. Structural Design of LRFE
The LRFE employs four miniature electric pushrods to drive a 4-SPU/SP bionic parallel mechanism, enabling three degree of freedom rotational movements of the lumbar region and one degree of freedom traction movement. The electric pushrods can be customized to meet stroke and thrust requirements based on the characteristics of human lumbar motion and practical needs. Due to the internal spiral self-locking mechanism of the core screw, the position can be maintained even without power. Calculated by the requirement that the overall mechanism needs to support approximately 30 kg of the upper body weight, the L16-100-150-12-P model produced by ACTUONIX (Saanichton, BC, Canada) is selected, as shown in the figure. It has a stroke of 100 mm, a reduction ratio of 150:1, a supply voltage of 12 V, a peak power point of 175 N, a reverse driving force of 102 N, and a maximum speed of 8 mm/s, and each electric pushrod is equipped with a built-in displacement sensor to feed-back the rod length position signal.
The LRFE is designed with an upper and lower double-ring support structure. The upper ring fits and binds to the lower edge of the human ribs and can be regarded as the moving platform of the parallel mechanism. The lower ring fits and binds to the human hip bone and can be regarded as the fixed platform of the parallel mechanism. With reference to the body dimensions of Chinese adults, in this paper, the length of the rectangle where the Hooke hinges of the upper thoracic platform are distributed is set as 36 cm, and the width is set as 16.5 cm; the length of the rectangle where the spherical joints of the pelvic platform are distributed is set as 38 cm, and the width is set as 6 cm; and when the human body maintains an upright posture, the height h between the upper thoracic platform and the pelvic platform is set as 22 cm, as shown in Figure 15.
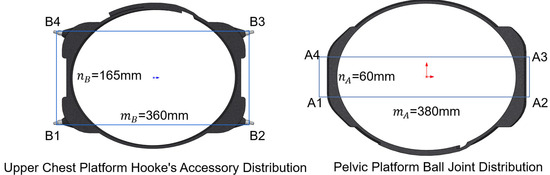
Figure 15.
Size distribution of the supporting structure of the upper and lower connecting platforms.
The control circuit board and driver of the LRFE are arranged in the middle of the left support plate of the upper ring, and a lithium-ion battery with long-lasting endurance is equipped on the right side, and the battery can be charged and replaced. The control system uses two inertial measurement unit sensors to calculate the movement intention of the human waist that the LRFE needs to follow. A Bluetooth communication module is integrated into the control circuit board to enable wireless data interaction with the upper computer via this module. A data recording module is also equipped on the controller to store the patient’s prescription and real-time movement data. The bionic structure design of the LRFE is shown in Figure 16.
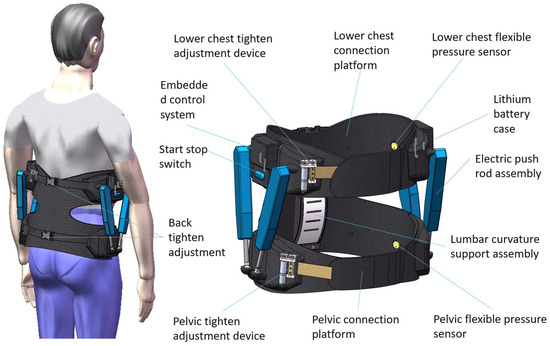
Figure 16.
Structural design diagram of the LRFE.
5.3. Fabrication of the Lumbar Rehabilitation Flexible Exoskeleton Prototype
Based on the above-mentioned bionic mechanism configuration and structural design of the LRFE, SolidWorks (2018 Version) was used to convert the 3D model into engineering drawings to complete the machining of mechanical parts for each module. According to the above selection, finished parts such as electric pushrods and sensors were purchased, and the assembly of mechanical components was completed. Then, according to the design, the fabric was cut and sewn to finish the assembly of the mechanical system of the lumbar rehabilitation exoskeleton prototype. After that, by the design requirements of the electrical system, electronic components such as communication modules, data recording modules, rechargeable batteries, and power switches were purchased. The design and SMT (Surface Mount Technology) soldering of the control system circuit board were completed, and then the wiring and power-on debugging were carried out to finish the fabrication of the entire prototype, as shown in Figure 17. This provides a prototype for the experimental verification of the subsequent research contents.
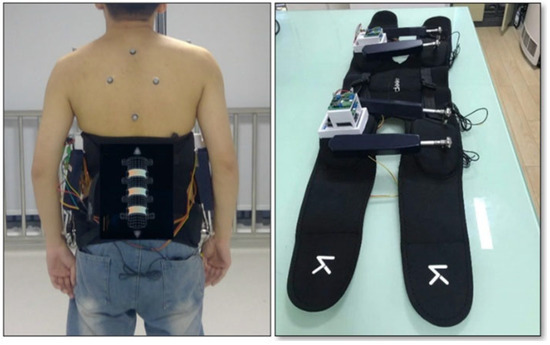
Figure 17.
Prototype of LRFE.
6. Workspace Analysis and Maximum Range of Motion Test of Lumbar Rehabilitation Flexible Exoskeleton
6.1. Workspace Analysis of Bionic Parallel Mechanism
After the human body wears the flexible exoskeleton robot, limb movements will be restricted by the exoskeleton’s range of motion. Desired operations can only be achieved in the workspace where human limbs and the exoskeleton robot overlap. The workspace of the bionic parallel mechanism of the LRFE must meet the daily maximum range of motion of the human lumbar region to satisfy the needs of patients.
The main factors affecting the size and shape of the workspace of the bionic parallel mechanism for LRFE include structural geometric dimensions, length of electric pushrods, variation range of driving pairs, variation range of revolute pairs, rotation range of spherical pairs, etc. Solving the workspace of the bionic parallel mechanism is based on the research of forward and inverse kinematic solutions, which is typically achieved using numerical algorithms. According to the parameters of the inverse kinematic model, the workspace of the 4-SPU/SP parallel mechanism is composed of the following factors: ① the length variation range of each driving link: the stroke of the electric pushrod is 100 mm, and the driving link length vaies within 200 300 mm; ② rotation angle constraints of each Hooke joint; and ③ rotation range constraints of each spherical joint. Before analyzing the mechanism’s workspace, the parameter variation ranges of each determinant are standardized according to actual operating conditions.
The length variation ranges of each driving rod are parameterized and standardized as
The rotation angle constraint conditions of the spherical joint can be expressed by the following equation:
In the equation, nSi is the direction vector of the spherical joint base in the static coordinate system.
The rotation angle constraint conditions of the Hooke joint can be expressed by the following equation:
In the equation, nSi is the direction vector of the Hooke joint base in the static coordinate system.
The 3D space search method is adopted to solve the workspace of the center point of the moving platform, that is, point-by-point searching for workspace values in the reference coordinate system, and all points that meet the constraint conditions are searched out. Plotting these points in the 3D coordinate space forms the workspace of the parallel mechanism. The workspace of the bionic parallel mechanism of the LRFE is obtained as shown in Figure 18.
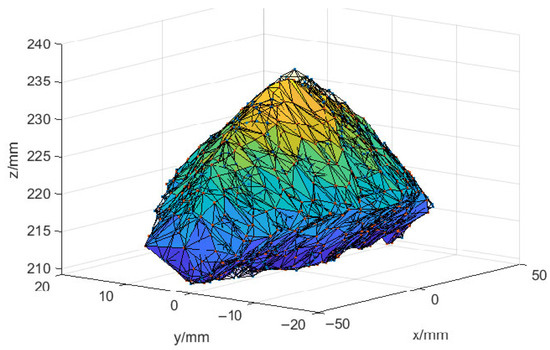
Figure 18.
Workspace analysis of 4-SPU/SP bionic parallel mechanism.
By using the forward kinematic model, the pose of the moving platform can be obtained by giving the rod lengths of the parallel mechanism. When the moving platform is at the boundary of the reachable workspace, the angles of each axis of the moving platform coordinate system relative to the fixed platform coordinate system are recorded. MATLAB can be used to plot the posture angle distribution of the moving platform of the parallel mechanism, as shown in Figure 19. Through the 3D motion capture system, we found that the daily motion range of the human lumbar region is as follows: forward flexion of about 60°, backward extension of about 15°, left/right lateral flexion of about 30°, and left/right rotation of about 20°. That is, the posture angle range of the moving platform of the bionic parallel mechanism is as follows: −30° ≤ α ≤ 30°, −15° ≤ β ≤ 60°, −20° ≤ γ ≤ 20°, according to the longitudinal change of the lumbar spine in hospital traction equipment (about 2 to 3 cm), i.e., 210 ≤ p, z ≤ 240 mm. From the posture angle distribution of the bionic parallel mechanism in Figure 20, the reachable motion range of the mechanism is obtained as follows: maximum flexion/extension of 85.9° around the x-axis, maximum bending of 33.2° around the y-axis, and maximum rotation of 25.7° around the z-axis. It can be concluded that the workspace of the 4-SPU/SP bionic parallel mechanism designed in this paper can fully cover the daily maximum range of motion requirements of the LRFE.
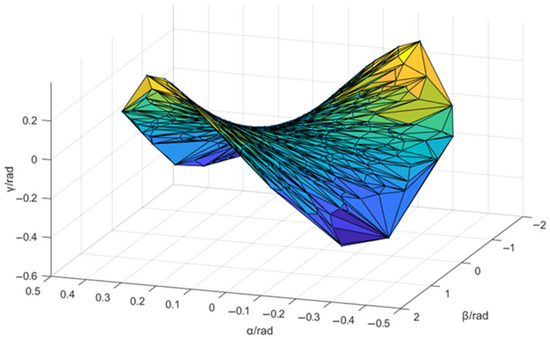
Figure 19.
Posture angle distribution of 4-SPU/SP bionic parallel mechanism.

Figure 20.
Experimental platform of lumbar rehabilitation flexible exoskeleton prototype.
6.2. Maximum Range of Motion Test Experiment for Prototype
This section conducts a maximum range of motion test on trunk movement while wearing the LRFE prototype to verify the practical feasibility of the bionic mechanism workspace design. The experimental platform for the LRFE prototype is built as shown in Figure 20, including the LRFE prototype, Motion Capture Systems (3D motion capture system) from Qualisys AB, Göteborg, Sweden, and a host laptop computer. A healthy young adult male subject, aged 26 years and 1.75 m in height, was recruited for the experiment. The experiment measured the maximum feasible range of trunk movement with and without an exoskeleton. A 3D motion capture system was used to record trunk movement, with reflective markers placed on the iliac crest, sacrum, sternoclavicular joint, and lower edge of the sternum of the test subjects.
First, a calibration wand was used to dynamically calibrate the 3D motion capture system. After calibration, the subject with reflective markers attached entered the capture space. In the Motion Capture Systems interface, corresponding markers were selected to construct rigid bodies for the pelvis and trunk, and relevant coordinate systems were established to enable real-time dynamic capture of lumbar motion angles. The tester was required to move the trunk as far as possible in the coronal (lateral bending), sagittal (forward/backward flexion), and transverse (rotation) planes both with and without wearing the LRFE. Six cameras performed real-time dynamic capture, as shown in Figure 21. The built-in software of Qualisys recorded and processed the data. The experimental results are presented in Table 6.
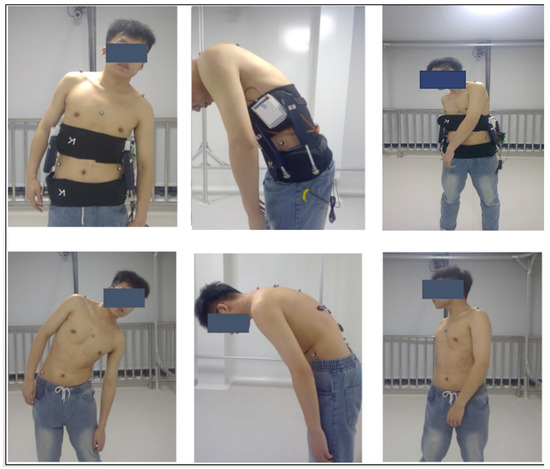
Figure 21.
Feasible range test of trunk movements with and without exoskeleton.
Table 6.
Calculation of feasible motion range test data for trunk with and without exoskeleton.
Experimental Results: As shown in Table 6, which presents the test data for forward flexion, left lateral flexion, and left rotation with and without wearing the LRFE, the maximum forward flexion angle is 61°, lateral flexion is 32°, and left rotation is 20° without the exoskeleton, which is consistent with the results of the daily motion range test for the human lumbar region. When wearing the exoskeleton, the range of motion is restricted, and the data are compared in a bar chart as shown in Figure 22. Calculating the percentage of the subject’s motion range with the exoskeleton relative to that without the exoskeleton, the forward flexion reaches approximately 83.7% of the bending angle without equipment, the left lateral flexion reaches approximately 85.2%, and the left rotation reaches approximately 83.5%. It can be seen that the LRFE prototype basically meets the designed workspace of the mechanism, ensuring the lumbar motion range for daily human activities.
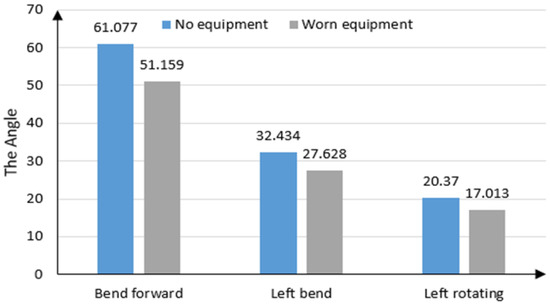
Figure 22.
Bar chart comparison of feasible motion range test results for trunk with and without exoskeleton.
7. Conclusions
Aimed at the needs of lumbar rehabilitation, an active flexible exoskeleton system based on a 4-SPU/SP bionic parallel mechanism was designed. By analyzing the kinematic mechanism and force characteristics of the human lumbar spine, a parallel mechanism configuration was proposed to match the four degree of freedom (DOF) motion of the lumbar spine (three-axis rotation + longitudinal traction), and the modified Kutzabach-Grubler formula was used to verify its DOF characteristics. A kinematic model of the mechanism was established based on the vector chain method, and explicit equations for forward/inverse solutions were derived. The accuracy of the model was verified through MATLAB numerical simulation. Furthermore, a dynamic model was constructed using the virtual work principle, and its rationality was validated by combining the ADAMS multibody dynamics simulation. According to the experimental data of human lumbar motion range, the structural design and prototype fabrication of the exoskeleton were completed. Prototype tests show that the range of motion after wearing the device can reach over 83.5% of that without the exoskeleton, and the workspace covers daily needs, verifying the feasibility of the mechanism design. The exoskeleton can dynamically unload lumbar loads, providing programmable active support for conservative treatment and postoperative rehabilitation.
Author Contributions
Conceptualization, H.W. and C.H.; methodology, C.H.; validation, C.H. and Z.Y.; formal analysis, C.H.; investigation, C.H. and D.W.; resources, Y.T.; data curation, Z.Y., R.Q. and Y.T.; writing—original draft preparation, C.H. and D.W.; writing—review and editing, C.H., Z.Y. and R.Q.; project administration, C.H.; All authors have read and agreed to the published version of the manuscript.
Funding
Shanghai Polytechnic University School Fund under Grant, EGD24DS06; Shanghai Seventh People’s Hospital-Shanghai Second Polytechnic University Medical-Industrial Cross-Cooperation Project, Medical Scene Language Model Development, QYYGJ2511.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- James, S.L.; Afshin, A.; Agesa, K.M.; Alam, T.; Ballesteros, K.E.; Blacker, B.F.; Briant, P.S.; Carter, A.; Cercy, K.M.; Cromwell, E.A. Global, regional, and national incidence, prevalence, and years lived with disability for 354 diseases and injuries for 195 countries and territories, 1990–2017: A systematic analysis for the Global Burden of Disease Study 2017. Lancet 2018, 392, 1789–1858. [Google Scholar] [CrossRef] [PubMed]
- Bernstein, I.A.; Malik, Q.; Carville, S.; Ward, S. Low back pain and sciatica: Summary of NICE guidance. BMJ 2017, 356, i6748. [Google Scholar] [CrossRef] [PubMed]
- Talaty, M.; Esquenazi, A.; Briceno, J.E. Differentiating ability in users of the ReWalk™ powered exoskeleton: An analysis of walking kinematics. In Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 20–24 June 2013; p. 6650469. [Google Scholar]
- Jezernik, S.; Colombo, G.; Morari, M. Automatic gait-pattern adaptation algorithms for rehabilitation with a 4-DOF robotic orthosis. IEEE Trans. Robot. Autom. 2004, 20, 574–582. [Google Scholar] [CrossRef]
- Huang, J.; Tu, X.; He, J. Design and evaluation of the RUPERT wearable upper extremity exoskeleton robot for clinical and in-home therapies. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 1–10. [Google Scholar] [CrossRef]
- Pransky, J. The Pransky interview: Russ Angold, co-founder and president of Eksotm Labs. Ind. Robot. Int. J. 2014, 41, 329–334. [Google Scholar] [CrossRef]
- Toxiri, S.; Calanca, A.; Ortiz, J.; Fiorini, P.; Caldwell, D.G. A Parallel-Elastic Actuator for a Torque-Controlled Back-Support Exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 492–499. [Google Scholar] [CrossRef]
- Toxiri, S.; Ortiz, J.; Caldwell, D.G. Assistive Strategies for a Back Support Exoskeleton: Experimental Evaluation. In Advances in Service and Industrial Robotics. RAAD 2017. Mechanisms and Machine Science; Ferraresi, C., Quaglia, G., Eds.; Springer: Cham, Switzerland, 2018; Volume 49. [Google Scholar]
- Harant, M.; Sreenivasa, M.; Millard, M.; Šarabon, N.; Mombaur, K. Parameter optimization for passive spinal exoskeletons based on experimental data and optimal control. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017. [Google Scholar]
- Kawamoto, H.; Lee, S.; Kanbe, S.; Sankai, Y. Power assist method for HAL-3 using EMG-based feedback controller. In Proceedings of the 2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme-System Security and Assurance (Cat. No. 03CH37483), Washington, DC, USA, 8 October 2003; Volume 2, pp. 1648–1653. [Google Scholar]
- Suzuki, K.; Mito, G.; Kawamoto, H.; Hasegawa, Y.; Sankai, Y. Intention-based walking support for paraplegia patients with Robot Suit HAL. Adv. Robot. 2007, 21, 1441–1469. [Google Scholar] [CrossRef]
- Activelink, P. AWN-03. 2020. Available online: https://news.panasonic.com/global/stories/2016/44969.html (accessed on 14 May 2020).
- FINGAS JON. Panasonic Shows How Its Robotic Suits Ease Your Burden. Available online: https://www.engadget.com/2016/03/21/panasonic-robotic-suits/ (accessed on 21 March 2016).
- Bo’an Medical Lumbar Traction Device. Available online: http://www.nbboan.com/cn/index.php (accessed on 21 October 2022).
- Du, M.; Wang, Q.; Zhu, L.; Liu, Z.; Shi, L.; Fang, Y.; Gu, Y. Development of a Control System for a Lower Limb Exoskeleton Rehabilitation Robot for Stroke Patients with Standing Instability. In Proceedings of the 2024 IEEE International Conference on Cognitive Computing and Complex Data (ICCD), Qinzhou, China, 28–30 September 2024; pp. 277–280. [Google Scholar] [CrossRef]
- Wang, L.; Xu, L.; Wang, Z.; Ye, L.; Mei, H. Design and Analysis of an Exoskeleton Robotic Actuator for Lumbar Spine Assisted Rehabilitation. Intelligent Robotics and Applications. In International Conference on Intelligent Robotics and Applications 2024; Lan, X., Mei, X., Jiang, C., Zhao, F., Tian, Z., Eds.; Lecture Notes in Computer Science; Springer: Singapore, 2025; Volume 15203. [Google Scholar] [CrossRef]
- Jeong, K.W.; Jeong, S.J.; Bae, K.T.; Kim, B.J. Analysis of Questionary After the Application of the Air Inflated Lumber Corset (Disk Dr.). Available online: https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/adma.201803388 (accessed on 1 August 2025).
- Karpiński, R.; Jaworski, U. Biomechanics of the human spine. J. Technol. Exploit. Mech. Eng. 2017, 3, 8–12. [Google Scholar] [CrossRef]
- Yue, S. Rapid Traction of the Lumbar Spine. Chin. J. Rehabil. Med. 2005, 20, 374–375. [Google Scholar]
- Panjabi, M.M.; Oxland, T.R.; Yamamoto, I.; Crisco, J.J. Mechanical behavior of the human lumbar and lumbosacral spine as shown by three-dimensional load-displacement curves. J. Bone Jt. Surg. Am. 1994, 76, 413–424. [Google Scholar] [CrossRef] [PubMed]
- Wilke, H.; Neef, P.; Caimi, M.; Hoogland, T.; Claes, L.E. New in vivo measurements of pressures in the intervertebral disc in daily life. Spine 1999, 24, 755–762. [Google Scholar] [CrossRef] [PubMed]
- Örtengren, R.; Dersson, G.B.J.; Nachemson, A.L. Studies of relationships between lumbar disc pressure, myoelectric back muscle activity, and intra-abdominal intragastric pressure. Spine 1981, 6, 98–103. [Google Scholar] [CrossRef] [PubMed]
- Lantz, S.A.; Schultz, A.B. Lumbar spine orthosis wearing. II. Effect on trunk muscle myoelectric activity. Spine 1986, 11, 838–842. [Google Scholar] [CrossRef] [PubMed]
- Agabegi, S.S.; Asghar, F.A.; Herkowitz, H.N. Spinal orthoses. J. Am. Acad. Orthop. Surg. 2010, 18, 657–667. [Google Scholar] [CrossRef] [PubMed]
- Hu, B.; Wang, A.; Li, Z.; Gao, J.; Shi, D.; Zhang, K. Kinematic and dynamic analysis of a motion seat based on a novel 4-UPS+PSPR parallel mechanism. J. Yanshan Univ. 2018, 42, 11–21+28. [Google Scholar]
- Kang, J.; Jia, Y.; Yuan, Y. Structural Design and Kinematic Analysis of Wearable Weight-Bearing Exoskeletons. Sci. Technol. Outlook 2017, 27, 298. [Google Scholar]
- Geng, M.; Bian, H.; Liu, C.; Li, X. Dynamical Modeling and Analysis of a 4UPS/UPR Parallel Mechanism Based on Rotor Torque. Comb. Mach. Tools Autom. Mach. Technol. 2018, 5, 42–46. [Google Scholar]
- Hu, B. Theoretical Research on Constraint-Based/Moment-Based Parallel Mechanisms and Series-Parallel Mechanisms with Few Degrees of Freedom. Ph.D. Thesis, Yanshan University, Qinhuangdao, China, 2010. [Google Scholar]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).