

Technologies 2026, 14(6), 322; https://doi.org/10.3390/technologies14060322 - 26 May 2026
Abstract
►
Show Figures
With the rapid expansion of rail transit networks and increasing operational density, foreign object intrusion on tracks has emerged as a critical threat to train safety. Conventional manual inspection methods suffer from low efficiency, high miss rates, and inadequate real-time performance, failing to
[...] Read more.
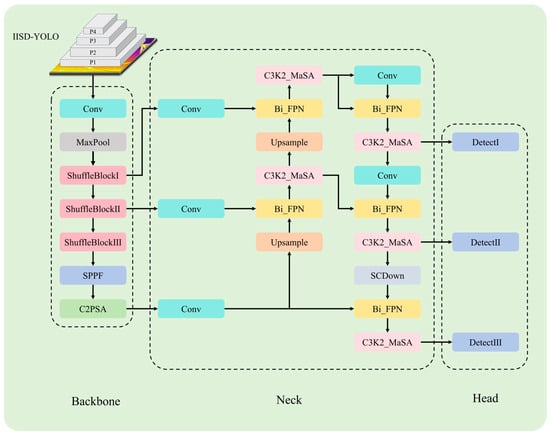
With the rapid expansion of rail transit networks and increasing operational density, foreign object intrusion on tracks has emerged as a critical threat to train safety. Conventional manual inspection methods suffer from low efficiency, high miss rates, and inadequate real-time performance, failing to meet the stringent requirements of modern intelligent railway maintenance. While deep learning offers a promising paradigm shift, existing models often struggle with complex background interference and multi-scale target detection in railway scenarios. To address these challenges, this paper proposes CMF-Net, a unified detection framework for railway track foreign object detection. The CGG module serves as a lightweight feature extraction unit in the backbone, mitigating gradient vanishing and overfitting. The MSAF module enables adaptive multi-scale feature fusion via dual attention (CBAM), enhancing small-object detectability. The FGAF module captures fine-grained edges and textures through a four-branch decomposed convolution and fine-grained attention, suppressing complex background interference. The BiFPN module restructures the neck for efficient bidirectional cross-scale feature fusion. Furthermore, the TPSA module injects explicit railway-domain prior knowledge by fusing a learnable rail-centerline distance-decay field with the CBAM spatial attention map, guiding the detector to focus on operational danger zones and reducing false positives. Experiments on the OFBDs dataset demonstrate that CMF-Net achieves a mean Average Precision (mAP50) of 89.2% and an mAP50:95 of 64.5%, surpassing the baseline YOLOv5s by 4.8 pp and 5.3 pp, respectively. The model maintains a compact parameter size of 5.4 M, a computational cost of 15.2 GFLOPs, and real-time inference capability (56.2 FPS). Edge-deployment feasibility is validated via on-device benchmarking on three Jetson platforms (Nano, Xavier NX, and Orin Nano), where INT8 TensorRT inference achieves 16.2, 108.7, and 153.8 FPS, respectively, under one-hour continuous-inference soak tests with peak power below 16 W and steady-state junction temperatures within safe thermal margins. Statistical significance testing (p < 0.05) confirms the stability of these performance gains. These results indicate that CMF-Net provides rapid and accurate detection of various track intrusions, enabling robust real-time monitoring in dynamic railway environments and enhancing operational safety and intelligence.
Full article
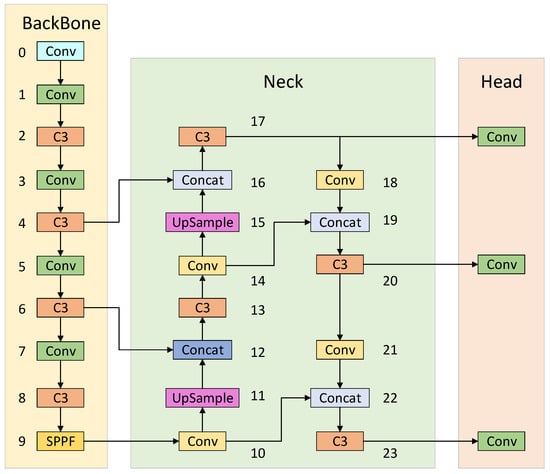
Figure 1














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}