

Appl. Sci., Volume 15, Issue 21 (November-1 2025) – 550 articles
Cover Story (view full-size image):
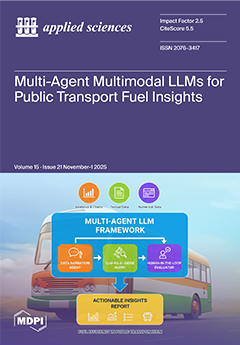
Enhancing fuel efficiency in public transportation requires the integration of complex multimodal data into interpretable, decision-relevant insights. However, traditional analytics and visualization methods often yield fragmented outputs that demand extensive human interpretation, limiting scalability and consistency. This study presents a multi-agent framework that leverages multimodal large language models (LLMs) to automate data narration and energy insight generation. The framework coordinates three specialized agents, including a data narration agent, an LLM-as-a-judge agent, and an optional human-in-the-loop evaluator, to iteratively transform analytical artifacts into coherent, stakeholder-oriented reports. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue