


Sensors, Volume 20, Issue 7 (April-1 2020) – 354 articles
Cover Story (view full-size image):
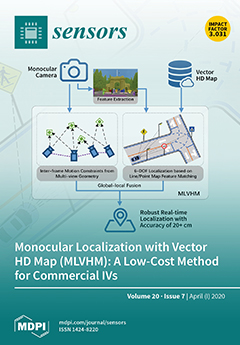
Vehicle localization using commercial monocular cameras can improve the robustness against degradation of global navigation satellite system (GNSS), and help with the dynamic update of high-definition (HD) maps using crowdsourcing cameras. Therefore, this paper proposes a vehicle localization method, called monocular localization with vector HD map (MLVHM). The method involves camera-based 6-DOF map-matching that aligns semantic-level geometric features that are robust against occlusion and lighting changes with the vector HD map. Experiments showed that MLVHM can achieve high-precision vehicle localization with a root mean square error (RMSE) of 24 cm within a 60 ms time delay using a vector HD map with a bandwidth of 50 kB/km. Compared with traditional monocular localizing with scale drift and error accumulation, the localization error is reduced by 86%.View this paper.
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue