Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering

Abstract
1. Introduction
2. Fundamental Principles of the PAA
2.1. Nonlinear Acoustic Theory
2.2. Theoretical Model of the PAA
2.2.1. Collimated Plane Wave Model
- The difference frequency signal pressure is proportional to the product of the pressure of two primary waves. Normally, and one derives .That is, if the primary source level drops by 3 dB, the secondary source level will drop by 6 dB.
- is proportional to the square of the frequency of the difference frequency signal. In other words, when the secondary frequency doubles, the secondary source level will increase by 12 dB.
- The half power beam-width (i.e., 3 dB beam-width) of the difference frequency signal can be approximately calculated as . Since , the beam-width of the difference frequency wave is relatively insensitive to the difference frequency, although the beam-width increases with the decrease of the difference frequency.
2.2.2. Spreading Effect and Acoustic Saturation
2.2.3. Summary of the Parametric Array Model
- Absorption limited: , in this case, both spreading and excess attenuation are ignored and Westervelt’s model can be used.
- Spreading limited: , this model has been initiated by Berktay and Leahy and takes into account the effects of spreading, but not those of excess attenuation.
- Shock-wave limited: , Moffett and Mellen gave a detailed analysis of this model [7].
2.2.4. Broadband Parametric Array
2.2.5. Recent Theoretical Development in the PAA
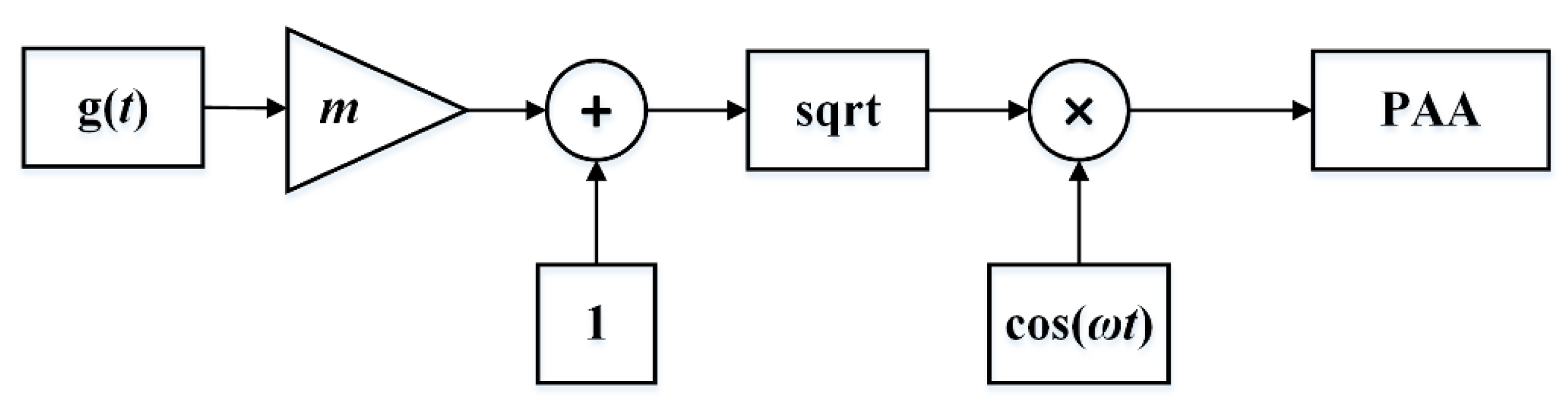
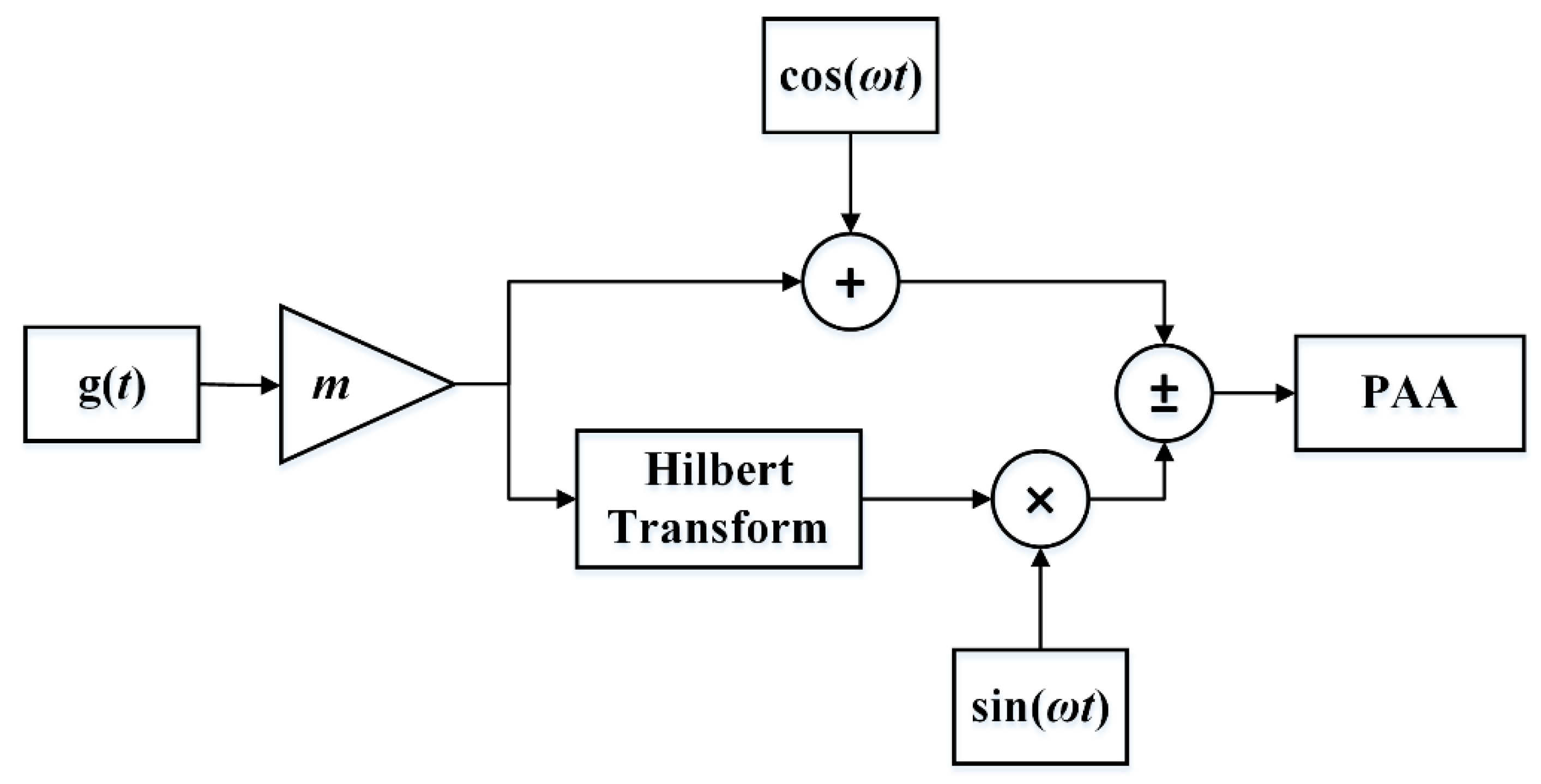
3. Signal Processing and Modulation Techniques
4. Design Considerations and Implementation Issues
4.1. Design Considerations of PAA Transducer
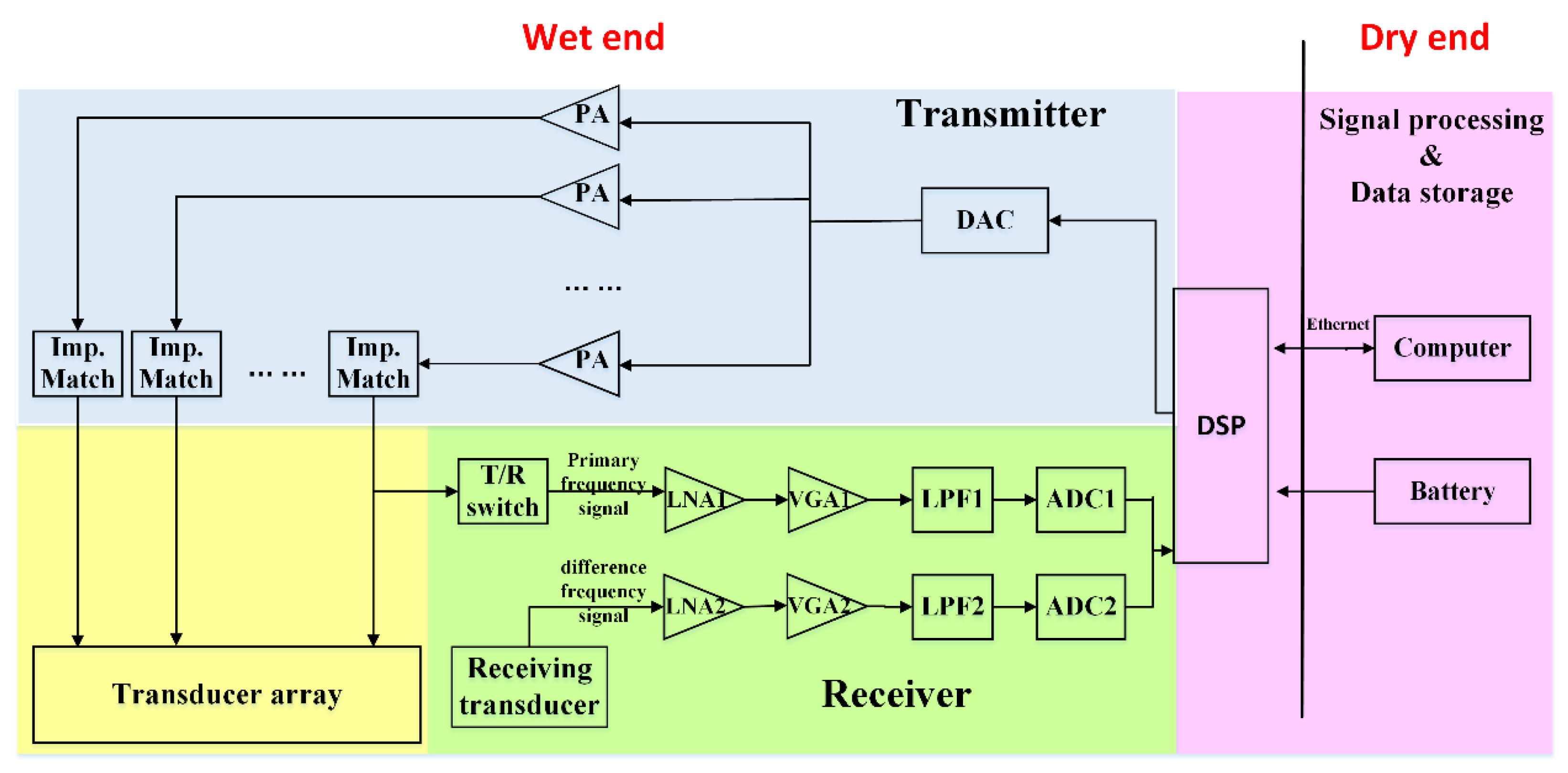
4.2. Implementation Issues
5. Applications of the PAA in Underwater Acoustic Engineering
5.1. Parametric Array Sub-Bottom Profiler
5.2. Parametric Underwater Communications
5.3. Detection of Buried Targets
5.4. Long-Range Ocean Research
6. Technical Challenges of the PAA
6.1. Improvement of Conversion Efficiency
6.2. Realization of Multi-Beam Detection
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Westervelt, P.J. Parametric acoustic arrays. J. Acoust. Soc. Am. 1963, 35, 535–537. [Google Scholar] [CrossRef]
- Berktay, H.O.; Al-Temimi, C.A. Scattering of sound by sound. J. Acoust. Soc. Am. 1971, 50, 181–187. [Google Scholar] [CrossRef]
- Black, L.J. A physical analysis of distortion produced by the nonlinearity of the medium. J. Acoust. Soc. Am. 1940, 12, 266–267. [Google Scholar] [CrossRef]
- Berktay, H.O. Possible exploitation of non-linear acoustics in underwater transmitting applications. J. Sound Vib. 1965, 2, 435–461. [Google Scholar] [CrossRef]
- Blackstock, D.T. Thermoviscous attenuation of plane, periodic, finite-amplitude sound waves. J. Acoust. Soc. Am. 1964, 36, 534–542. [Google Scholar] [CrossRef]
- Kopp, L.; Cano, D.; Dubois, E.; Wang, L.S.; Smith, B.; Coates, R.F.W. Potential performance of parametric communications. IEEE J. Ocean. Eng. 2000, 25, 282–295. [Google Scholar] [CrossRef]
- Moffett, M.B.; Mellen, R.H. Model for parametric acoustic sources. J. Acoust. Soc. Am. 1977, 61, 325–337. [Google Scholar] [CrossRef]
- Kuznetsov, V.P. Equations of nonlinear acoustics. Sov. Phys. Acoust. 1971, 16, 467–470. [Google Scholar]
- Zabolotskaya, E.A.; Khokhlov, R.V. Quasi-plane waves in the nonlinear acoustics of confined beams. Sov. Phys. Acoust. 1969, 15, 35–40. [Google Scholar]
- Humphrey, V.F. Nonlinear propagation in ultrasonic fields: Measurements, modelling and harmonic imaging. Ultrasonics 2000, 38, 267–272. [Google Scholar] [CrossRef]
- Samuel, M.; Han, J.H.; Bae, J.; Lee, C.H. Analysis of secondary source levels of a parametric array transducer. In Proceedings of the Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Ji, P.; Tan, E.L.; Gan, W.S.; Yang, J. A comparative analysis of preprocessing methods for the parametric loudspeaker based on the Khokhlov-Zabolotskaya-Kuznetsov equation for speech reproduction. IEEE Trans. Audio, Speech Lang. Process. 2011, 19, 937–946. [Google Scholar] [CrossRef]
- Lee, Y.-S. Numerical Solution of the KZK Equation for Pulsed Finite Amplitude Sound Beams in Thermoviscous Fluids. Ph.D. Thesis, University of Texas at Austin, Austin, TX, USA, 1993. [Google Scholar]
- Aver’yanov, M.V.; Khokhlova, V.A.; Sapozhnikov, O.A.; Blanc-Benon, P.; Cleveland, R.O. Parabolic equation for nonlinear acoustic wave propagation in inhomogeneous moving media. Acoust. Phys. 2006, 52, 623–632. [Google Scholar] [CrossRef]
- Hajihasani, M.; Farjami, Y.; Gharibzadeh, S.; Tavakkoli, J. A novel numerical solution to the diffraction term in the KZK nonlinear wave equation. In Proceedings of the 38th Annual Symposium of Ultrasonic Industry Association (UIA), Vancouver, BC, Canada, 23–25 March 2009. [Google Scholar]
- Cavanagh, E.; Cook, B.D. Gaussian-Laguerre description of ultrasonic fields--Numerical example: Circular piston. J. Acoust. Soc. Am. 1980, 67, 1136–1140. [Google Scholar] [CrossRef]
- Wen, J.J.; Breazeale, M.A. A diffraction beam field expressed as the superposition of Gaussian beams. J. Acoust. Soc. Am. 1988, 83, 1752–1756. [Google Scholar] [CrossRef]
- Ding, D.; Shui, Y.; Lin, J.; Zhang, D. A simple calculation approach for the second harmonic sound field generated by an arbitrary axial-symmetric source. J. Acoust. Soc. Am. 1996, 100, 727–733. [Google Scholar] [CrossRef]
- Ding, D. A simplified algorithm for the second-order sound fields. J. Acoust. Soc. Am. 2000, 108, 2759–2764. [Google Scholar] [CrossRef]
- Ding, D. A simplified algorithm for second-order sound beams with arbitrary source distribution and geometry (L). J. Acoust. Soc. Am. 2004, 115, 35–37. [Google Scholar] [CrossRef]
- Williams, K.L.; Satkowiak, L.J.; Bugler, D.R. Linear and parametric array transmission across a water-sand interface--Theory, experiment, and observation of beam displacement. J. Acoust. Soc. Am. 1989, 86, 311–325. [Google Scholar] [CrossRef]
- Bergem, O.; Chotiros, N.P.; Mautner, A.M.; Løvik, A. Acoustic penetration of a silty sand sediment in the 1–10-kHz band. IEEE J. Ocean. Eng. 1997, 22, 604–615. [Google Scholar]
- Nomura, H.; Hedberg, C.M.; Kamakura, T. Numerical simulation of parametric sound generation and its application to length-limited sound beam z. Appl. Acoust. 2012, 73, 1231–1238. [Google Scholar] [CrossRef]
- Korman, M.S.; Sabatier, J.M. Nonlinear acoustic techniques for landmine detection. J. Acoust. Soc. Am. 2004, 116, 3354–3369. [Google Scholar] [CrossRef] [PubMed]
- Korman, M.; Sabatier, J. Soil-plate oscillator: A model for nonlinear acoustic landmine detection. J. Acoust. Soc. Am. 2015, 138, 1837. [Google Scholar] [CrossRef]
- Liu, X.; Li, J.; Gong, X.; Zhu, Z.; Zhang, D. Theoretical and experimental study of the third-order nonlinearity parameter C/A for biological media. Physica D 2007, 228, 172–178. [Google Scholar] [CrossRef]
- Mitri, F.G. Nonlinear acoustics in higher-order approximation: Comment. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 1715–1716. [Google Scholar] [CrossRef] [PubMed]
- Cleveland, R.O. Nonlinear acoustics in biomedical ultrasound. In Proceedings of the Recent Developments in Nonlinear Acoustics: 20th International Symposium on Nonlinear Acoustics Including the 2nd International Sonic Boom Forum, écully, France, 29 June–3 July 2015; p. 020001-1–8. [Google Scholar]
- Shah, A.A.; Ribakov, Y.; Hirose, S. Nondestructive evaluation of damaged concrete using nonlinear ultrasonics. Mater. Des. 2009, 30, 775–782. [Google Scholar] [CrossRef]
- Pieczonka, L.; Zietek, L.; Kleppka, A.; Staszewski, W.J.; Aymerich, F.; Uhl, T. Damage imaging in composites using nonlinear vibro-acoustic wave modulations. Struct. Control Heal. Monit. 2018, 25, 1–13. [Google Scholar] [CrossRef]
- Garner, G.; Steer, M.B. A cascaded second-order approach to computing third-order scattering of noncollinear acoustic beams. Appl. Acoust. 2012, 73, 1220–1230. [Google Scholar] [CrossRef]
- Johnson, S.J.; Member, S.; Steer, M.B. An efficient approach to computing third-order scattering of sound by sound with application to parametric arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 1729–1741. [Google Scholar] [CrossRef]
- Pompei, F.J. Beams of sound: A low-distortion airborne parametric array. J. Acoust. Soc. Am. 1999, 105, 1372. [Google Scholar] [CrossRef]
- Pompei, F.J. Parametric audio system. J. Acoust. Soc. Am. 2008, 124, 3362. [Google Scholar] [CrossRef]
- Li, S. Pre-processing methods for parametric array to generate wideband difference frequency signals. In Proceedings of the Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Wunderlich, J.; Wendt, G.; Müller, S. High-resolution echo-sounding and detection of embedded archaeological objects with nonlinear sub-bottom profilers. Mar. Geophys. Res. 2005, 26, 123–133. [Google Scholar] [CrossRef]
- Trucco, A.; Pescetto, A. Acoustic detection of objects buried in the seafloor. Electron. Lett. 2002, 36, 1595–1596. [Google Scholar] [CrossRef]
- Schneider von Deimling, J.; Held, P.; Feldens, P.; Wilken, D. Effects of using inclined parametric echosounding on sub-bottom acoustic imaging and advances in buried object detection. Geo-Marine Lett. 2016, 36, 113–119. [Google Scholar] [CrossRef]
- Gan, W.S.; Yang, J.; Kamakura, T. A review of parametric acoustic array in air. Appl. Acoust. 2012, 73, 1211–1219. [Google Scholar] [CrossRef]
- Kite, T.D.; Post, J.T.; Hamilton, M.F. Parametric array in air: Distortion reduction by preprocessing. J. Acoust. Soc. Am. 1998, 103, 2871. [Google Scholar] [CrossRef]
- Smith, B.V. Conditions for distortionless underwater communications using a parametric array. Acta Acust. United Acust. 1995, 81, 161–166. [Google Scholar]
- Vyas, A.L.; Raj, V.S.B.; Gupta, R.G. Design considerations of parametric arrays. In Proceedings of the 1998 International Symposium on Underwater Technology, Tokyo, Japan, 17 April 1998; pp. 98–102. [Google Scholar]
- Svilainis, L.; Motiejūnas, G. Power amplifier for ultrasonic transducer excitation. Ultragarsas 2006, 58, 30–36. [Google Scholar]
- Gao, Z.; Gui, P.; Jordanger, R. An integrated high-voltage low-distortion current-feedback linear power amplifier for ultrasound transmitters using digital predistortion and dynamic current biasing techniques. IEEE Trans. Circuits Syst. II. Express Briefs 2014, 61, 373–377. [Google Scholar] [CrossRef]
- Hojong, C.; Park, W.; Jung-Yeol, Y.; Changhan, Y. Power MOSFET linearizer of a high-voltage power amplifier for high-frequency pulse-echo instrumentation. Sensors 2017, 17, 764. [Google Scholar] [CrossRef]
- Fano, R.M. Theoretical limitations on the broadband matching of arbitrary impedances. J. Franklin Inst. 1950, 249, 57–83. [Google Scholar] [CrossRef]
- Youlat, D.C. A New Theory of broad-band matching. IEEE Trans. circuit theory 1964, 11, 30–50. [Google Scholar] [CrossRef]
- Yarman, B.S.; Carlin, H.J. A simplified “real frequency” technique applied to broad-band multistage microwave amplifiers. In Proceedings of the 1982 IEEE MTT-S International Microwave Symposium Digest, Dallas, TX, USA, 15–17 June 1982; pp. 529–531. [Google Scholar]
- Sun, G.; Jansen, R.H. Broadband doherty power amplifier via real frequency technique. IEEE Trans. Microw. Theory Tech. 2012, 60, 99–111. [Google Scholar] [CrossRef]
- Huang, H.; Paramo, D. Broadband electrical impedance matching for piezoelectric ultrasound transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2011, 58, 2699–2707. [Google Scholar] [CrossRef] [PubMed]
- An, J.; Song, K.; Zhang, S.; Yang, J.; Cao, P. Design of a broadband electrical impedance matching network for piezoelectric ultrasound transducers based on a genetic algorithm. Sensors 2014, 14, 6828–6843. [Google Scholar] [CrossRef] [PubMed]
- Woodward, B.; Cook, J.C.; Goodson, A.D.; Lepper, P.A. A phase steered parametric array for sub-bottom profiling. In Proceedings of the Sixth International Conference on Electronic Engineering in Oceanography, Cambridge, UK, 19–21 July 1994; pp. 77–82. [Google Scholar]
- Humphrey, V.F.; Robinson, S.P.; Smith, J.D.; Martin, M.J.; Beamiss, G.A.; Hayman, G.; Carroll, N.L. Acoustic characterization of panel materials under simulated ocean conditions using a parametric array source. J. Acoust. Soc. Am. 2008, 124, 803–814. [Google Scholar] [CrossRef] [PubMed]
- Qu, K.; Zou, B.; Chen, J.; Guo, Y.; Wang, R. Experimental study of a broadband parametric acoustic array for sub-bottom profiling in shallow water. Shock Vib. 2018, 2018, 3619257. [Google Scholar] [CrossRef]
- Schock, S.G.; LeBlanc, L.R.; Mayer, L.A. Chirp subbottom profiler for quantitative sediment analysis. Geophysics 1989, 54, 445–450. [Google Scholar] [CrossRef]
- Plets, R.M.K.; Dix, J.K.; Adams, J.R.; Bull, J.M.; Henstock, T.J.; Gutowski, M.; Best, A.I. The use of a high-resolution 3D chirp sub-bottom profiler for the reconstruction of the shallow water archaeological site of the Grace Dieu (1439), River Hamble, UK. J. Archaeol. Sci. 2009, 36, 408–418. [Google Scholar] [CrossRef]
- Mitchell, N.C. Comment on: “The spatial extent of the deep western boundary current into the bounty trough: New evidence from parasound sub-bottom profiling” by Horn and Uenzelmann-Neben. Mar. Geophys. Res. 2016, 37, 371–374. [Google Scholar] [CrossRef]
- Nikolovska, A.; Sahling, H.; Bohrmann, G. Hydroacoustic methodology for detection, localization, and quantification of gas bubbles rising from the seafloor at gas seeps from the eastern Black Sea. Geochem. Geophys. Geosyst. 2008, 9, 10010. [Google Scholar] [CrossRef]
- Godø, O.R.; Foote, K.G.; Dybedal, J.; Tenningen, E. Observing Atlantic herring by parametric sonar. J. Acoust. Soc. Am. 2009, 125, 2718. [Google Scholar] [CrossRef]
- Muñoz, A.; Cristobo, J.; Rios, P.; Druet, M.; Polonio, V.; Uchupi, E.; Acosta, J. Sediment drifts and cold-water coral reefs in the Patagonian upper and middle continental slope. Mar. Pet. Geol. 2012, 36, 70–82. [Google Scholar] [CrossRef]
- Schreider, A.A.; Schreider, A.A.; Sazhneva, A.E.; Galindo-Zaldivar, J.; Ruano, P.; Maldonado, A.; Martos-Martin, Y.; Lobo, F. Structure of subsurface sediments in the scan basin (Scotia Sea). Oceanology 2018, 58, 133–136. [Google Scholar] [CrossRef]
- Wiedmann, K.; Buch, T.; Weber, T. Parametric underwater communications. In Proceedings of the Meetings on Acoustics, Acoustical Society of America ECUA 11th European Conference on Underwater Acoustics, Edinburgh, Scotland, 2–6 July 2012; Volume 17, p. 070021. [Google Scholar]
- Zheng, M.; Wang, L.; Stoner, R.; Coates, R.F.W. Underwater digital communication utilising parametric sonar with M-ary DPSK modulation. IEE Proc. Radar Sonar Navig. 1999, 146, 213–218. [Google Scholar] [CrossRef]
- Yin, J.; Zhang, X.; Zhou, Y. Differential pattern time delay shift coding underwater acoustic communication using parametric array. J. Acoust. Soc. Am. 2015, 137, 2214. [Google Scholar] [CrossRef]
- Zhao, A.-B.; Cheng, Y.; An, T.-S.; Hui, J. Covert underwater acoustic communication system using parametric array. Mar. Tech. Soc. J. 2019, 53, 20–26. [Google Scholar] [CrossRef]
- Tang, S.; Zhu, G.; Zhang, X.; Yin, J.; Guo, L.; Shi, W. Under-ice underwater acoustic communication based on direct sequence spread spectrum system with parametric emission. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–4. [Google Scholar]
- Trucco, A. Experimental results on the detection of embédded objects by a prewhitening filter. IEEE J. Ocean. Eng. 2001, 26, 783–794. [Google Scholar] [CrossRef]
- Jacobsen, N.; Morén, P.; Sundin, G.; Pihl, J. System for mono- and bistatic sonar investigation of buried objects. In Proceedings of the Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 1147–1150. [Google Scholar]
- Zhang, X.; Lin, W.; Wang, X.; Zhang, H. Design and performance evaluation of phased parametric array for the detection of geological conditions ahead of drill bit. In Proceedings of the 2014 IEEE International Ultrasonics Symposium, Chicago, IL, USA, 3–6 September 2014; pp. 1975–1978. [Google Scholar]
- Lee, C.H.; Lee, J.; Bae, J.; Paeng, D.-G.; Lee, S.W.; Shin, J.; Jung, J.W. Digital communication system using beamsteering for difference frequency in a parametric array. J. Acoust. Soc. Am. 2012, 131, 3445. [Google Scholar] [CrossRef]
- Dybedal, J.; Boe, R. Ultra-high resolution sub-bottom profiling for detection of thin layers and objects. In Proceedings of the Oceans 1994, Brest, France, 13–16 September 1994; pp. I/634–I/638. [Google Scholar]
- LePage, K.D.; Schmidt, H. Bistatic synthetic aperture imaging of proud and buried targets from an AUV. IEEE J. Ocean. Eng. 2002, 27, 471–483. [Google Scholar] [CrossRef]
- Boulinguez, D.; Quinquis, A. 3-D underwater object recognition. IEEE J. Ocean. Eng. 2002, 27, 814–829. [Google Scholar] [CrossRef]
- Esipov, I.B. The Parametric array and long-range ocean research. Acoust. Today 2010, 6, 20–26. [Google Scholar] [CrossRef]
- Esipov, I.B.; Zimenkov, S.V.; Kalachev, A.I.; Nazarov, V.E. Sensing of an ocean eddy by directional parametric radiation. Acoust. Phys. 1993, 39, 89–90. [Google Scholar]
- Esipov, I.B.; Kalachev, A.I.; Sokolov, A.D.; Sutin, A.M.; Sharonov, G.A. Long range propagation experiments with a powerful parametric source. Acoust. Phys. 1994, 40, 61–64. [Google Scholar]
- Wygant, I.O.; Kupnik, M.; Windsor, J.C.; Wright, W.M.; Wochner, M.S.; Yaralioglu, G.G.; Hamilton, M.F.; Khuri-Yakub, B.T. 50 kHz capacitive micromachined ultrasonic transducers for generation of highly directional sound with parametric arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 193–203. [Google Scholar] [CrossRef] [PubMed]
- Wygant, I.O.; Kupnik, M.; Yaralioglu, G.; Khuri-Yakub, B.T.; Windsor, J.C.; Wright, W.M.; Wochner, M.S.; Hamilton, M.F. 6F-4 50-kHz capacitive micromachined ultrasonic transducers for generating highly directional sound with parametric arrays. In Proceedings of the IEEE Ultrasonics Symposium, New York, NY, USA, 28–31 October 2007; pp. 519–522. [Google Scholar]
- Ahn, H.; Hwang, Y.; Moon, W. Underwater parametric array source transducer composed of PZT rods and thin polymer plate with high power efficiency for wideband sound generation. J. Acoust. Soc. Am. 2016, 140, 3089. [Google Scholar] [CrossRef]
- Gan, W.S.; Yang, J.; Tan, K.S.; Er, M.H. A digital beamsteerer for difference frequency in a parametric array. IEEE Trans. Audio, Speech Lang. Process. 2006, 14, 1018–1024. [Google Scholar]
- Zhang, F.D.; Xu, L.M.; Chen, M. The design of beam-forming for broadband beam-steerable parametric array. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1580–1585. [Google Scholar]
- Zhang, F.D.; Xu, L.M.; Chen, M.; Zhang, F.; Xu, L.; Chen, M.; Huang, D. Study on the beam forming method for phased parametric array based on amplitude weighting. Chin. J. Sci. Instrum. 2016, 37, 429–436. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Specifications | SES-2000 Medium Sub-Bottom Profiler | BATHY 2010 Sub-Bottom Profiler |
|---|---|---|
| Water Depth Range | 2–2000 m | 10–12000 m |
| Sediment Penetration | 70 m (depending on sediment type and noise) | 200 m (depending on sediment type and noise) |
| Range Resolution | 1 cm | 8 cm |
| Beam Width (−3dB) | 1.0° × 1.0° | −3dB:31°, −6dB:45° |
| Primary frequency (PF) | 100 kHz (frequency band 85–115 kHz) | 3.5 kHz (for sediment penetration) 12 kHz (for sounding) |
| PF Source Level | >247 dB re 1 μPa at 1 m | >156 dB re 1 μPa at 1 m |
| Acoustic Power | 5.5 kW | 4 kW |
| Secondary frequency | Selectable: 3.5, 5, 6, 8, 10, 12, 15 kHz | —— |
| Pulse Width | 0.07–3.5 ms | 0.2–50 ms |
| Pulse Type | Ricker, CW, LFM chirp | CW, LFM chirp |
| Transducer Size | W 0.50 m × D 0.50 m × H 0.12 m | W 0.483 m × D 0.635 m × H 0.40 m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Huang, S.H.; Li, W. Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering. Sensors 2020, 20, 2148. https://doi.org/10.3390/s20072148
Zhou H, Huang SH, Li W. Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering. Sensors. 2020; 20(7):2148. https://doi.org/10.3390/s20072148
Chicago/Turabian StyleZhou, Hanyun, S.H. Huang, and Wei Li. 2020. "Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering" Sensors 20, no. 7: 2148. https://doi.org/10.3390/s20072148
APA StyleZhou, H., Huang, S. H., & Li, W. (2020). Parametric Acoustic Array and Its Application in Underwater Acoustic Engineering. Sensors, 20(7), 2148. https://doi.org/10.3390/s20072148