Bayesian Inversion for Geoacoustic Parameters in Shallow Sea †

 , , , ,
, , , ,
Abstract
1. Introduction
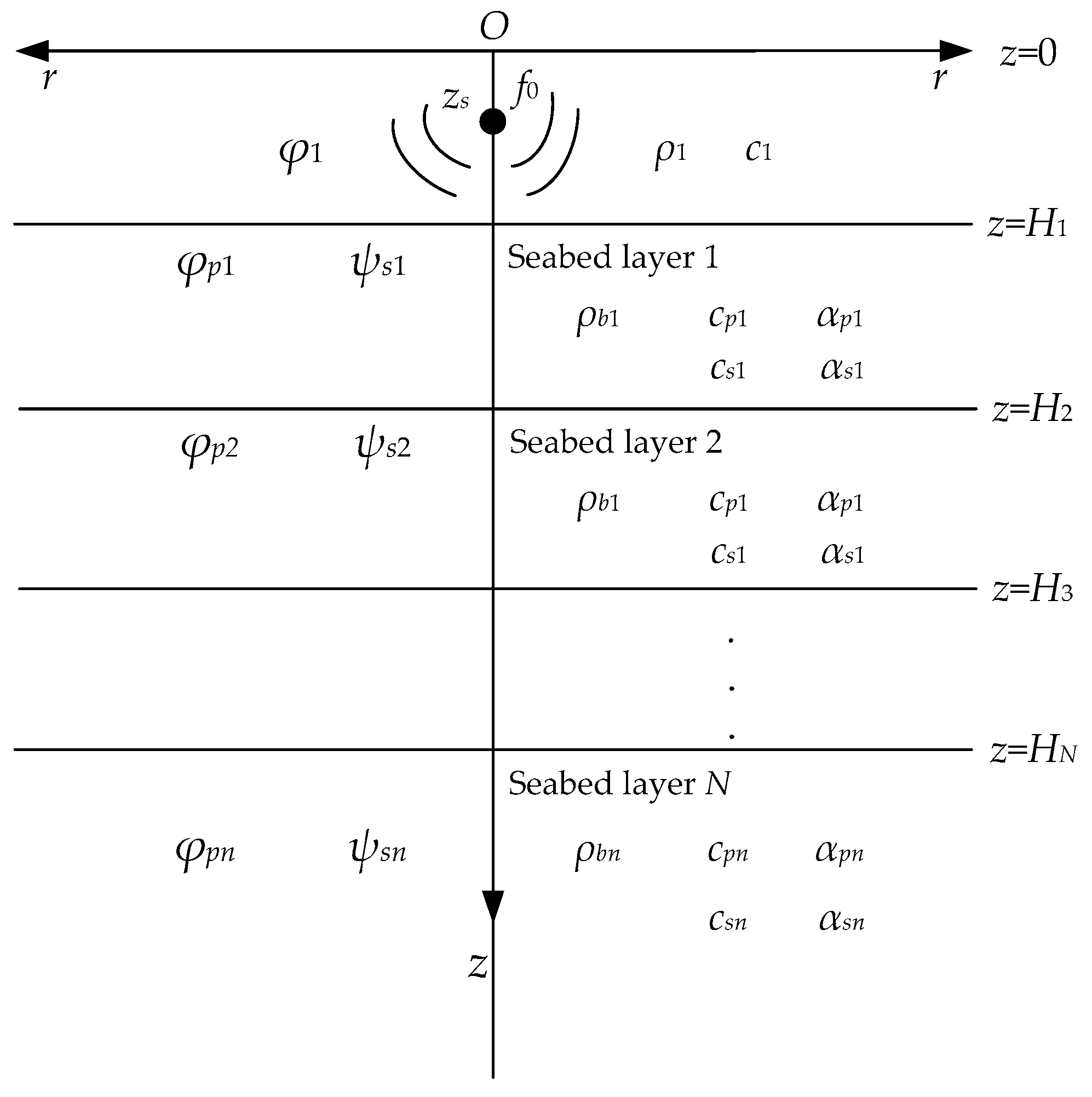
2. Prediction Modeling of a Shallow Sea Acoustic Field
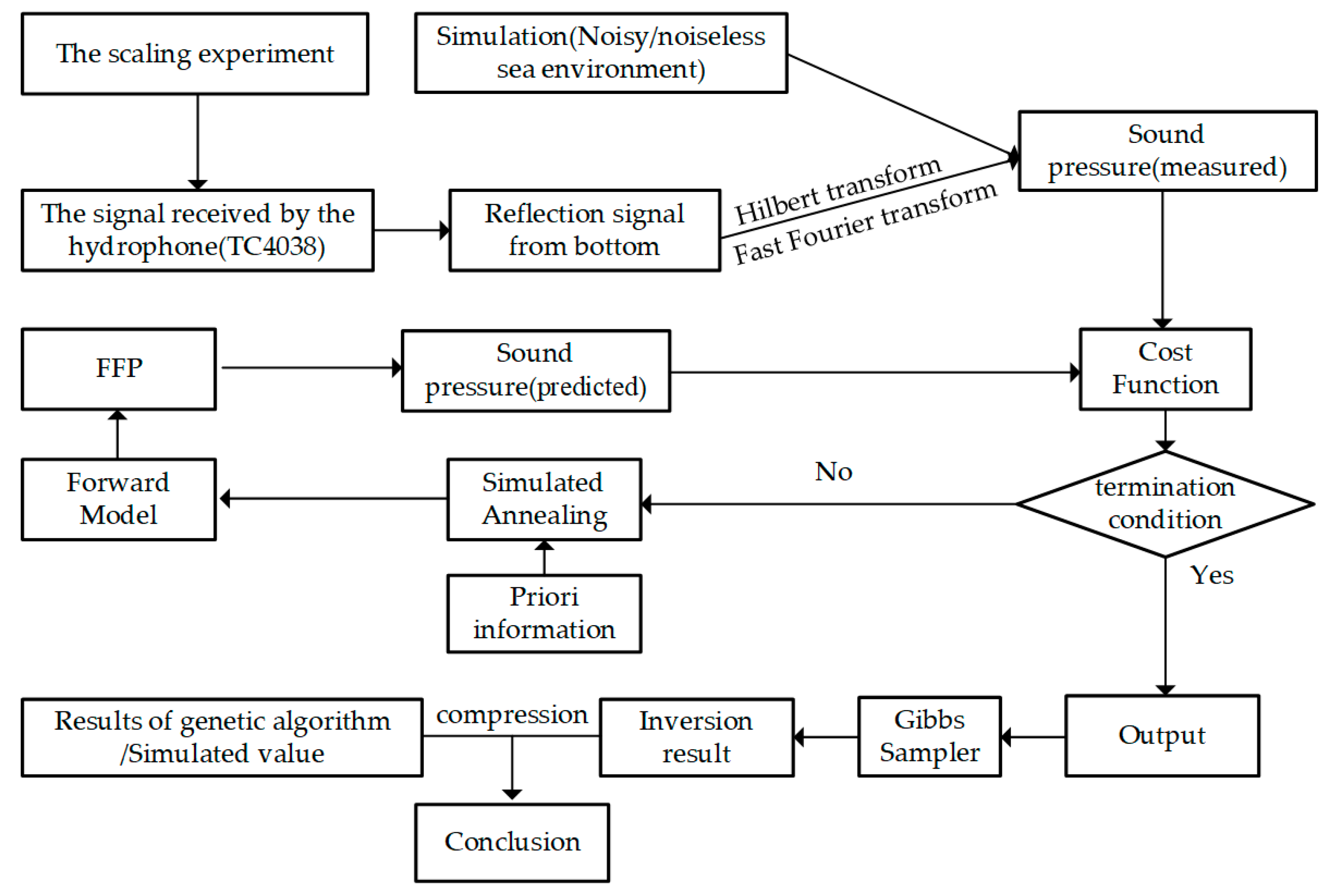
3. Inversion Method
3.1. Bayesian Inversion Theory
3.2. Cost Function
4. Simulation Results
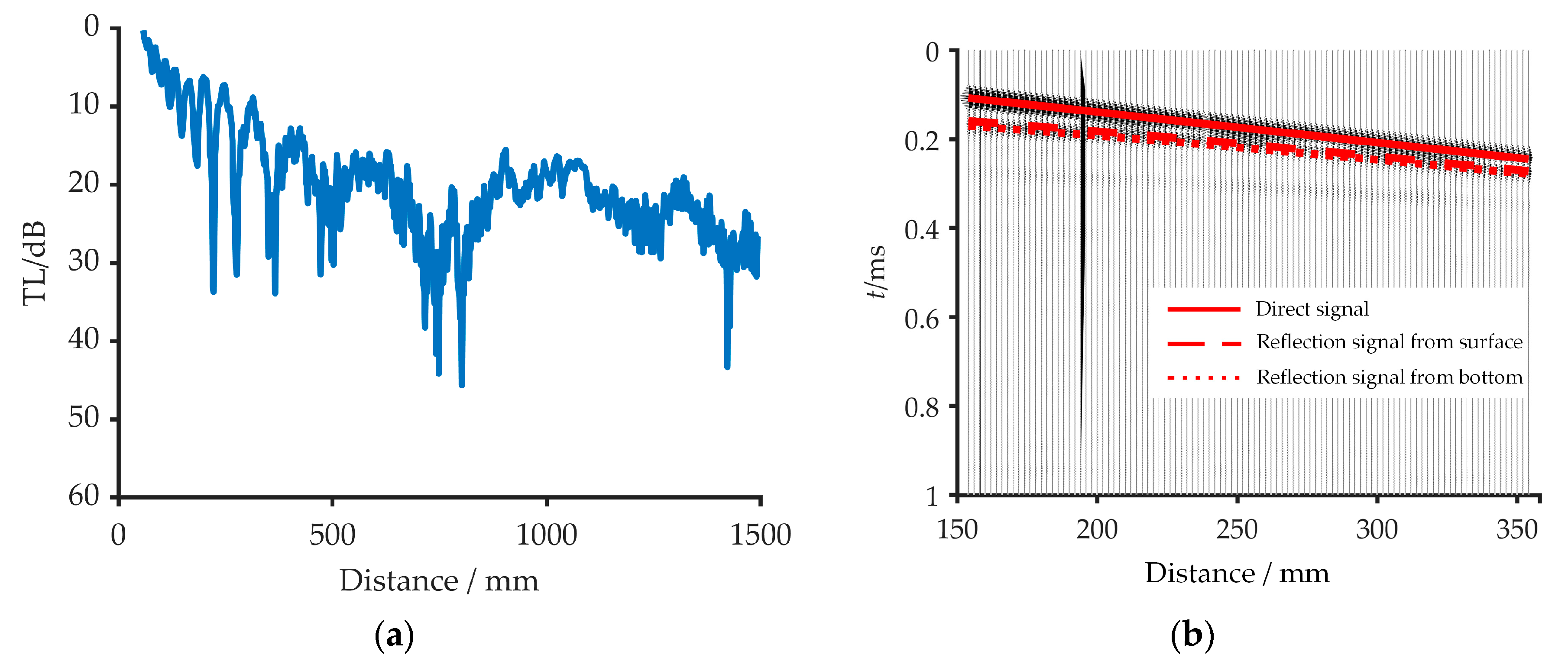
4.1. The Analysis of the Acoustic Propagation Characteristics
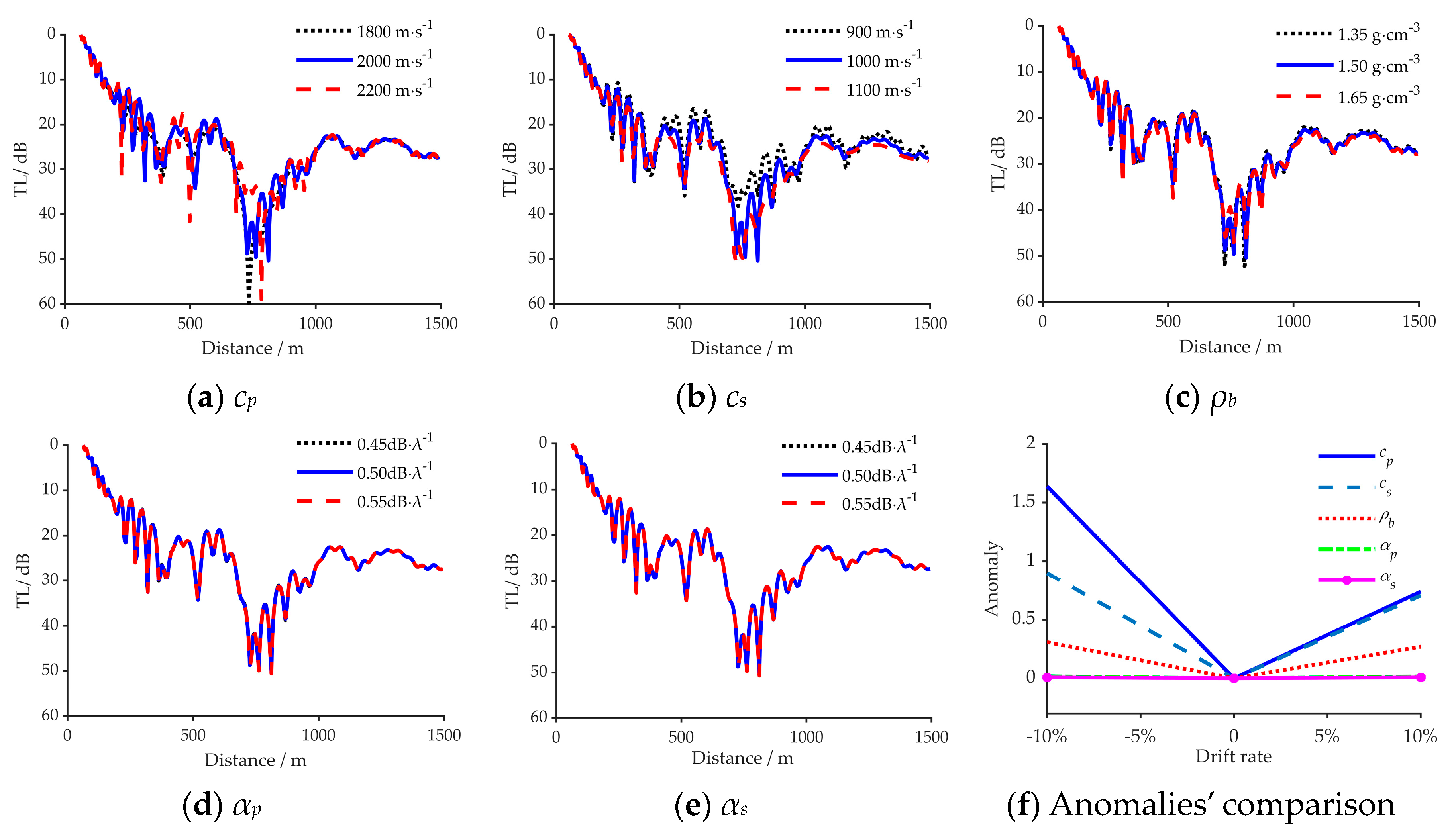
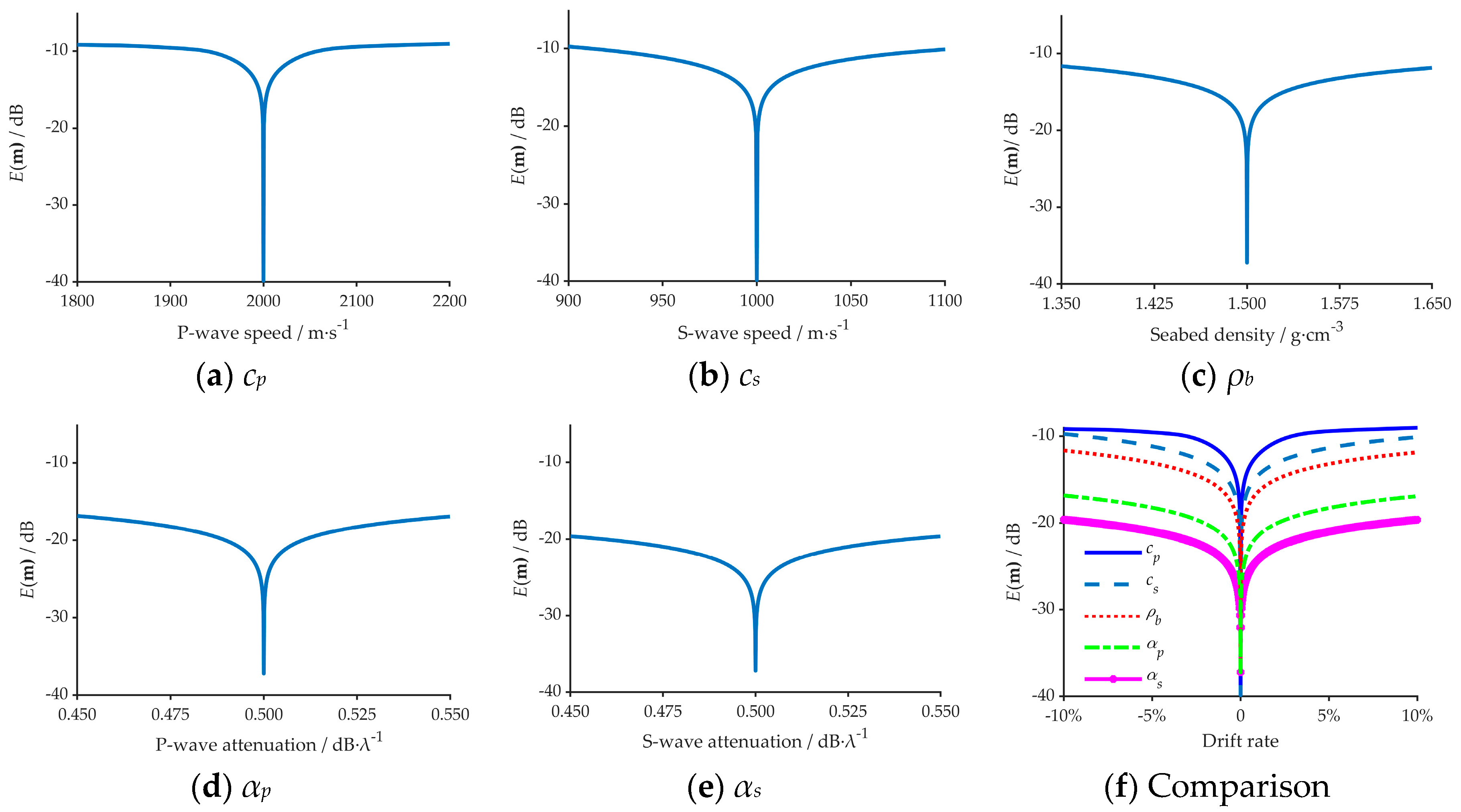
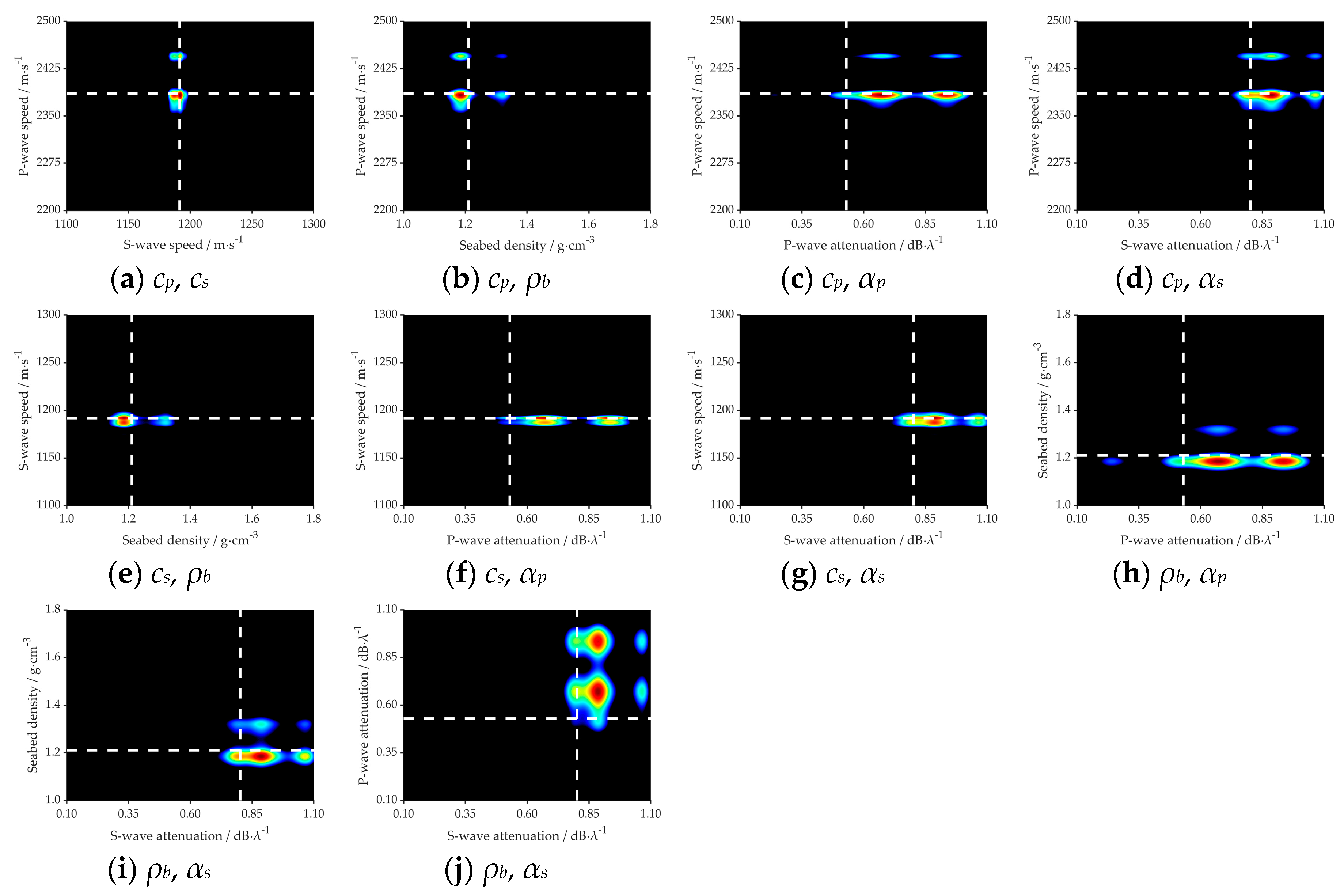
4.2. The Analysis of the Inversion Parameters’ Sensitivity
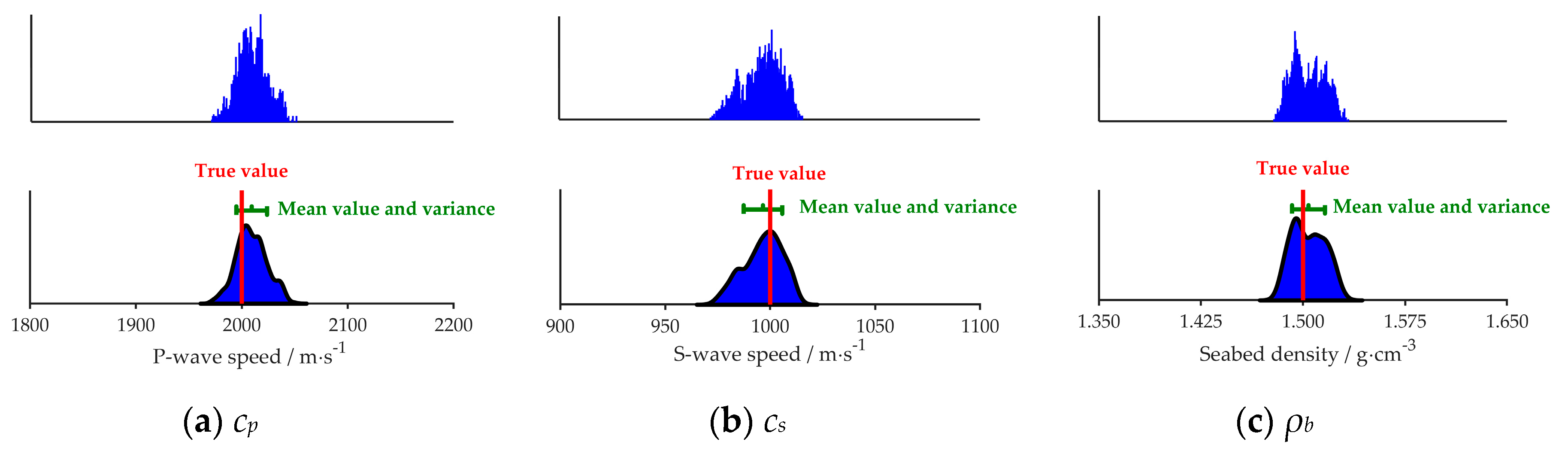
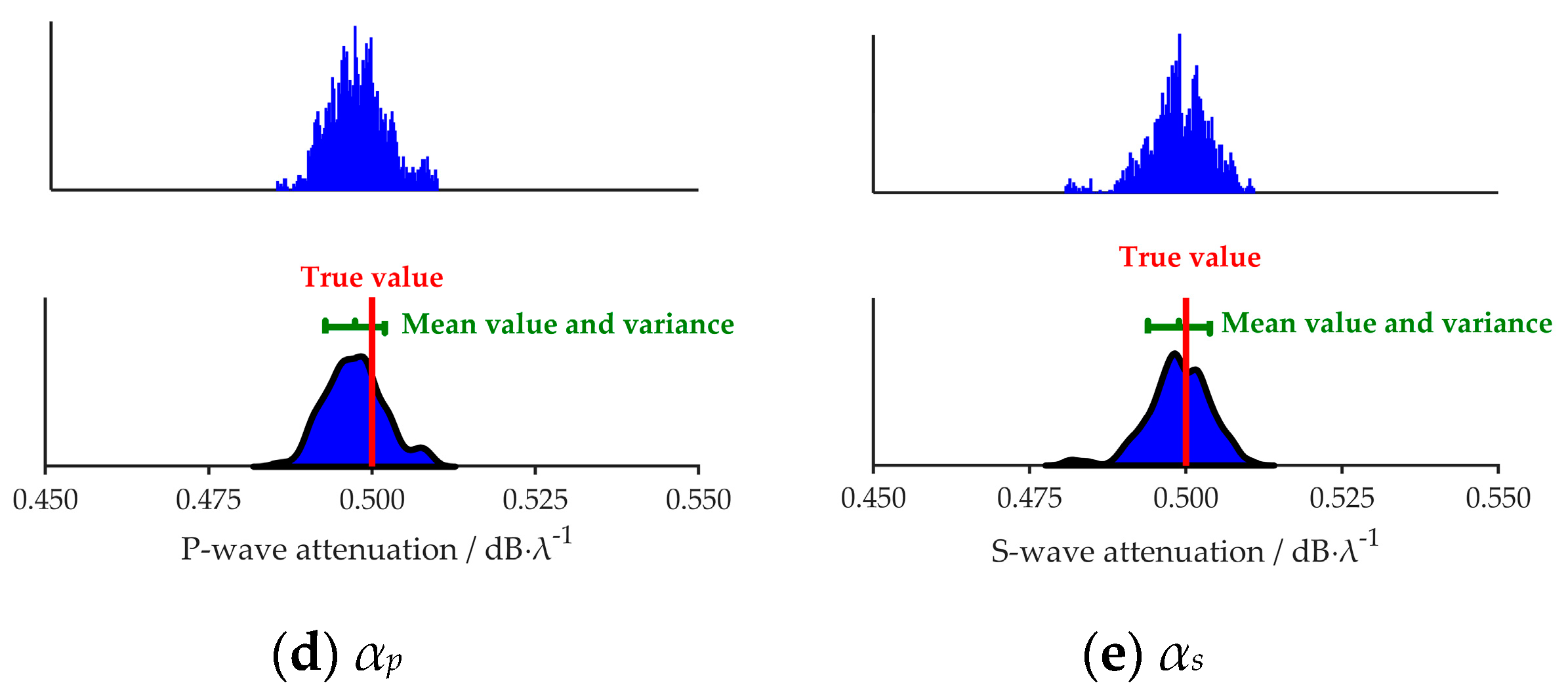
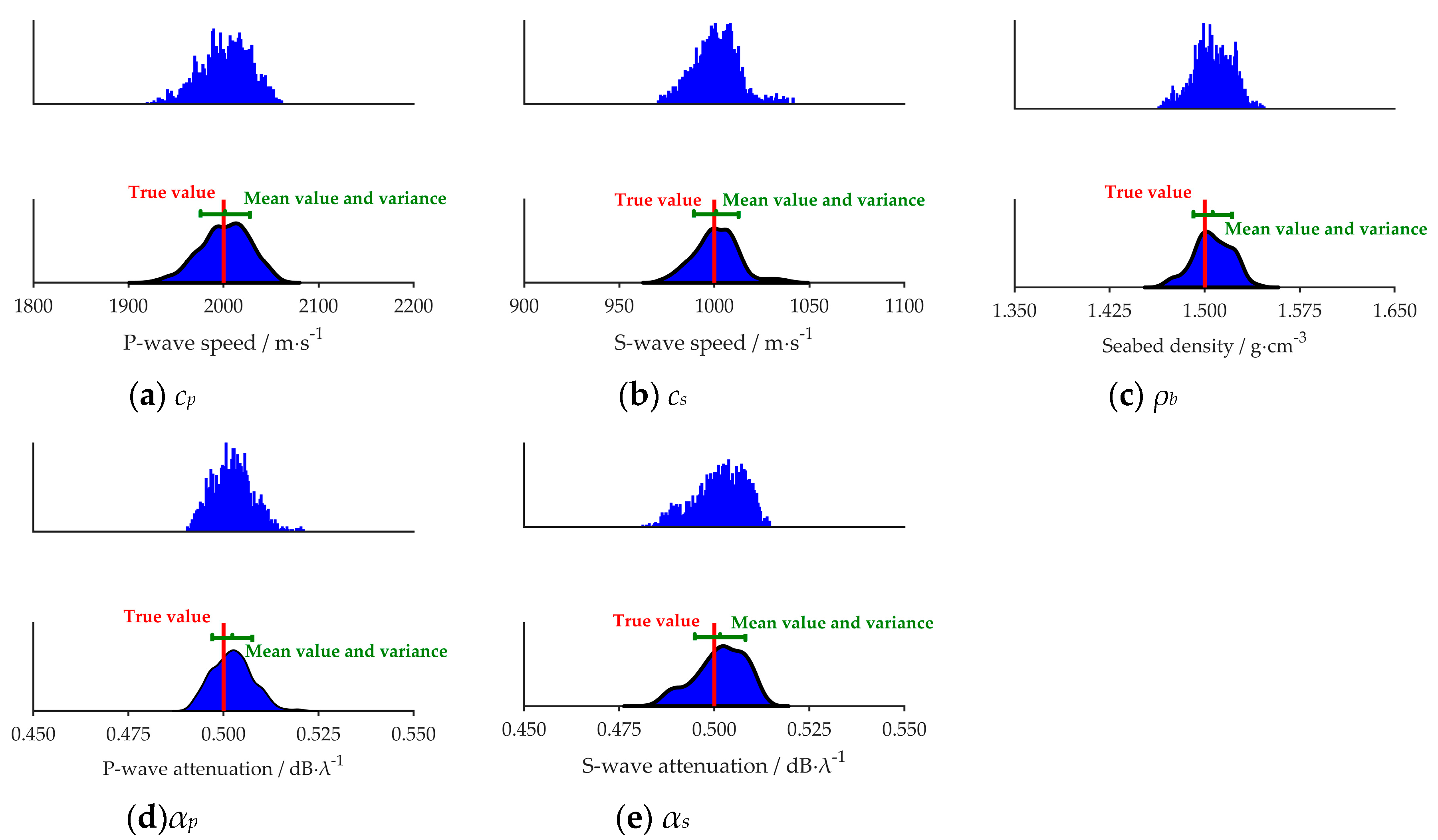
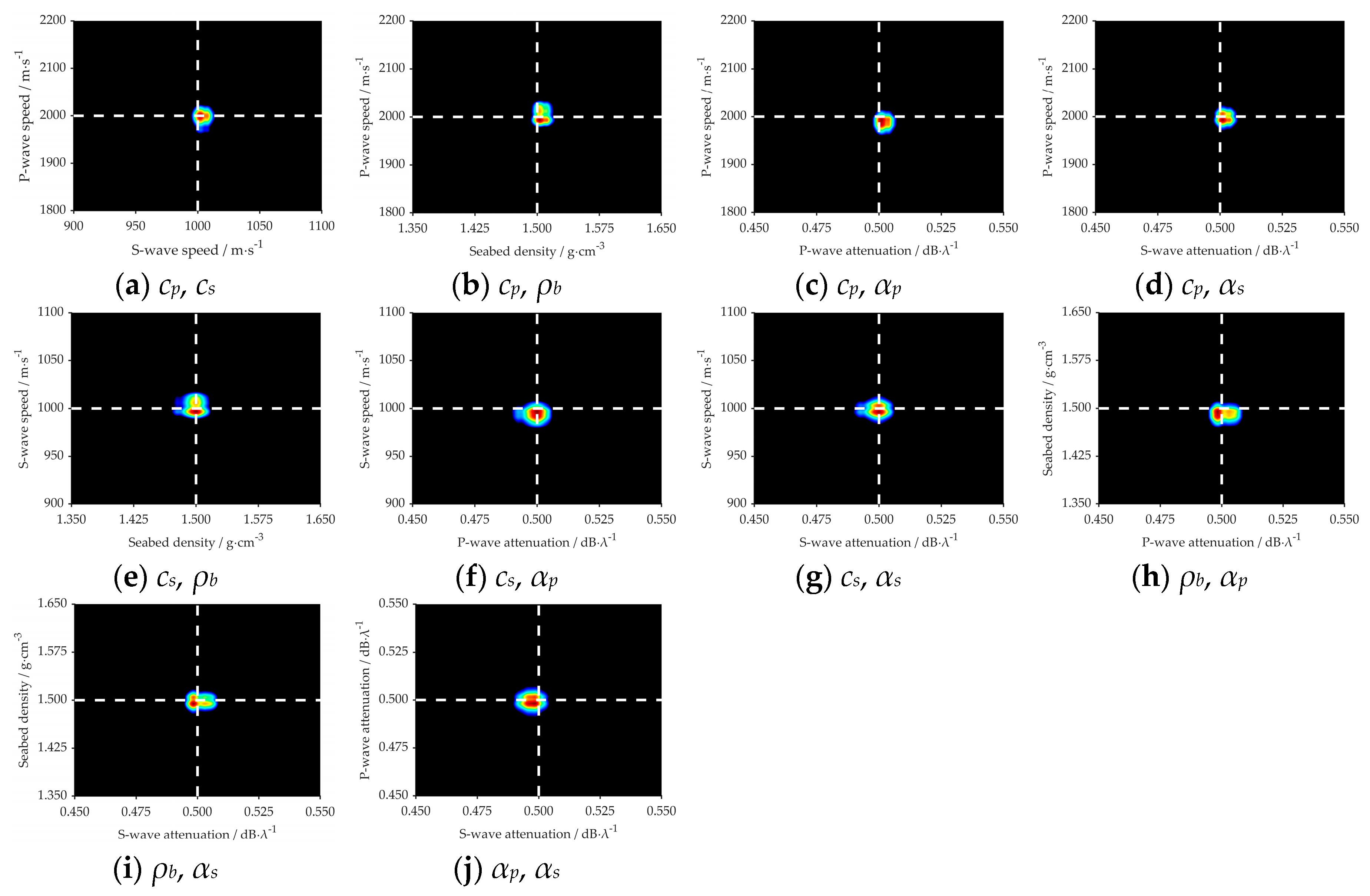
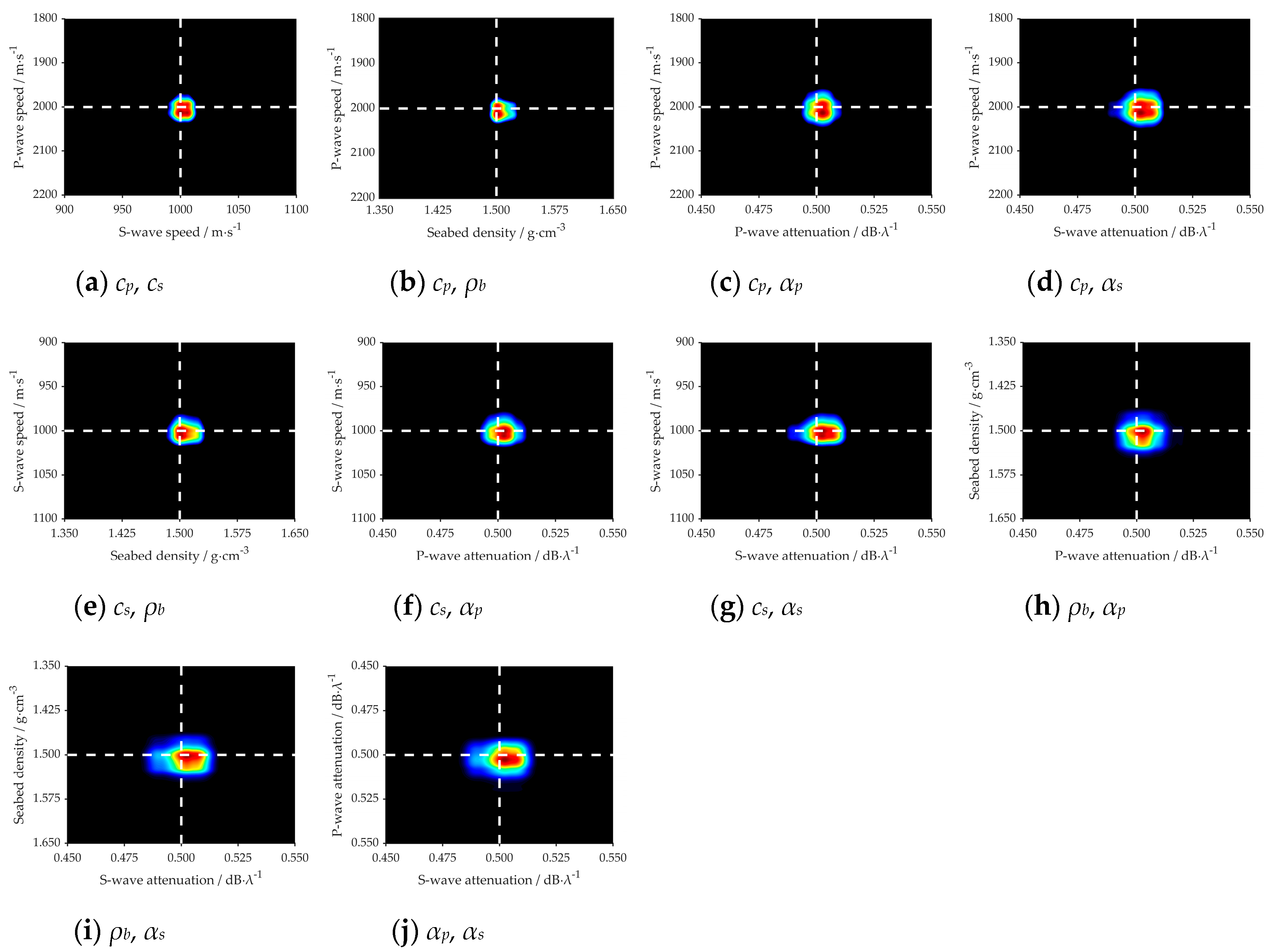
4.3. The Inversion Results
5. Results of Measured Data
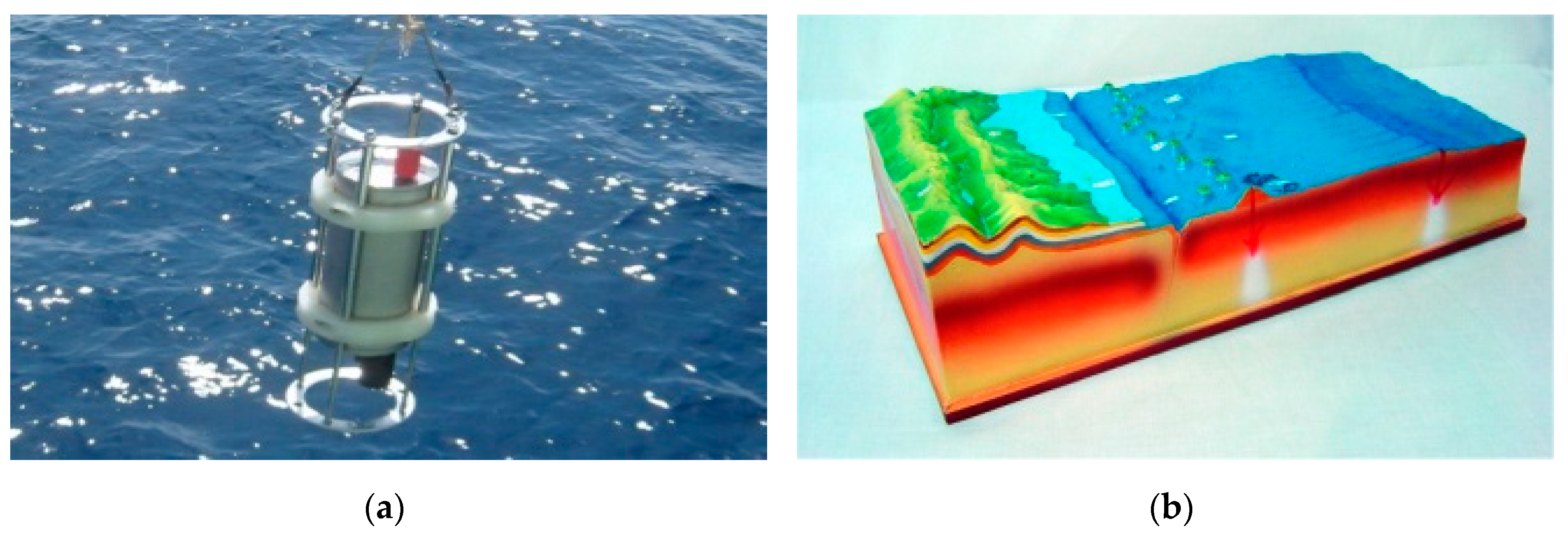
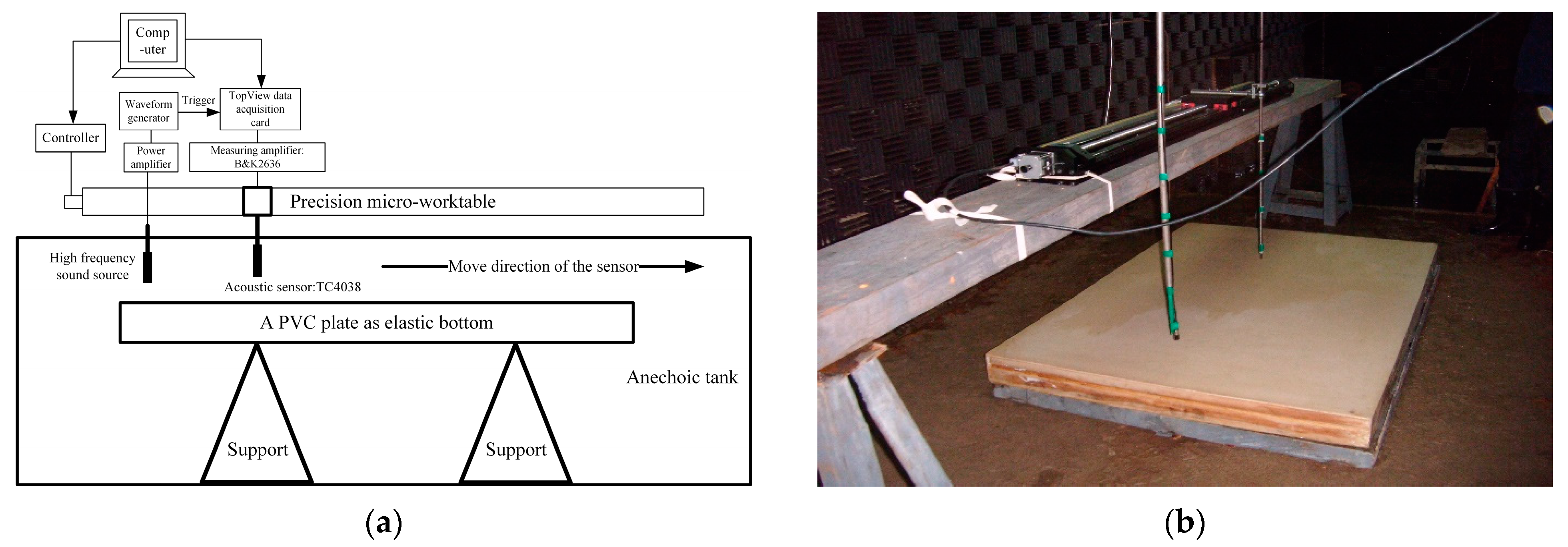
5.1. Introduction to the Scaling Experiment
5.2. Procedure and Data Processing of the Scaling Experiments
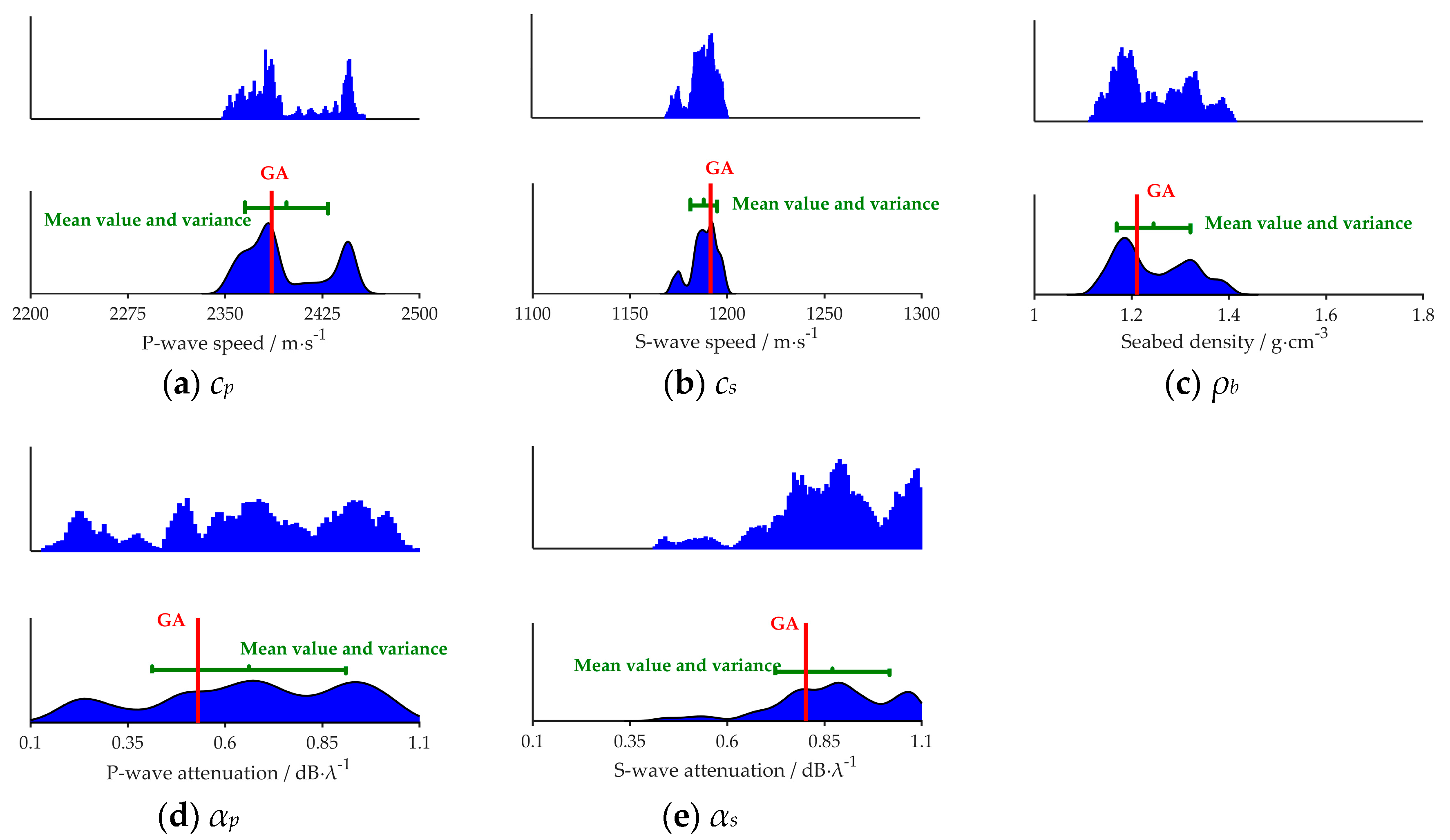
5.3. Analysis of Inversion Results
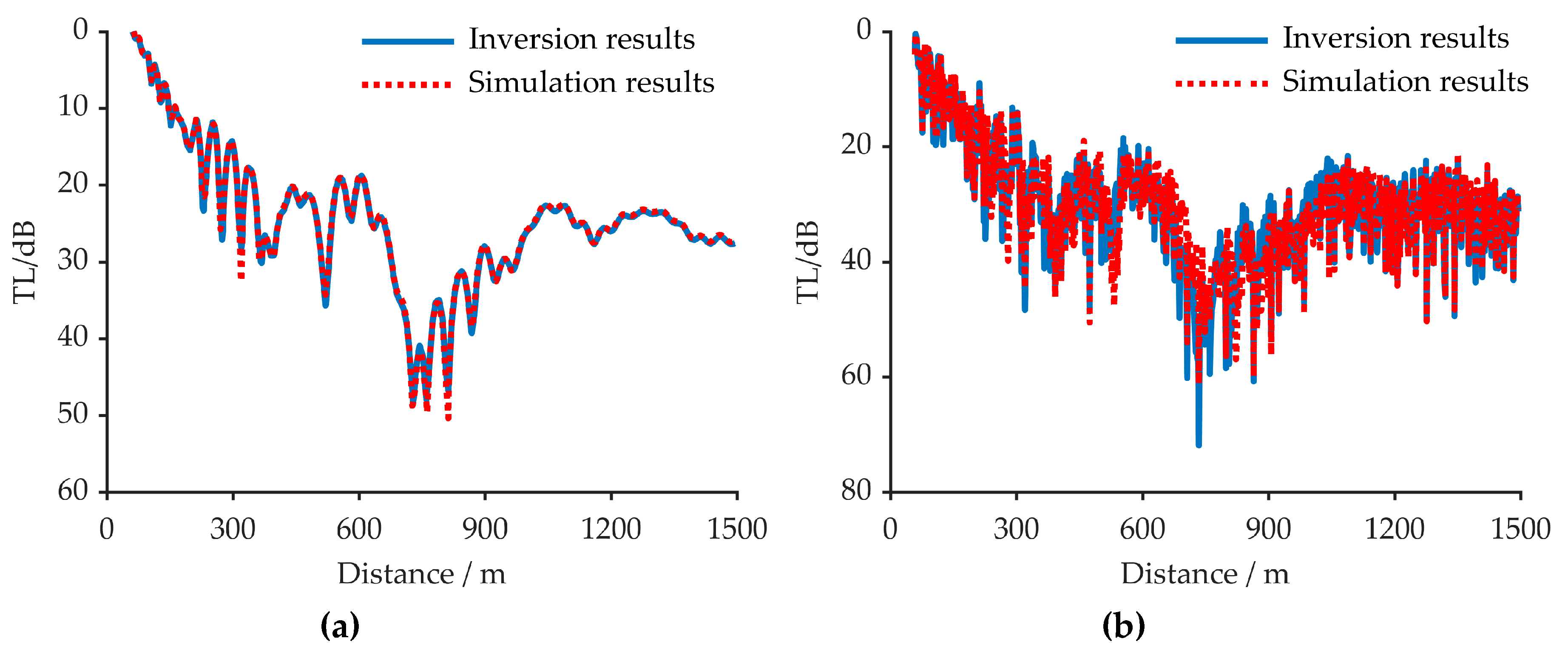
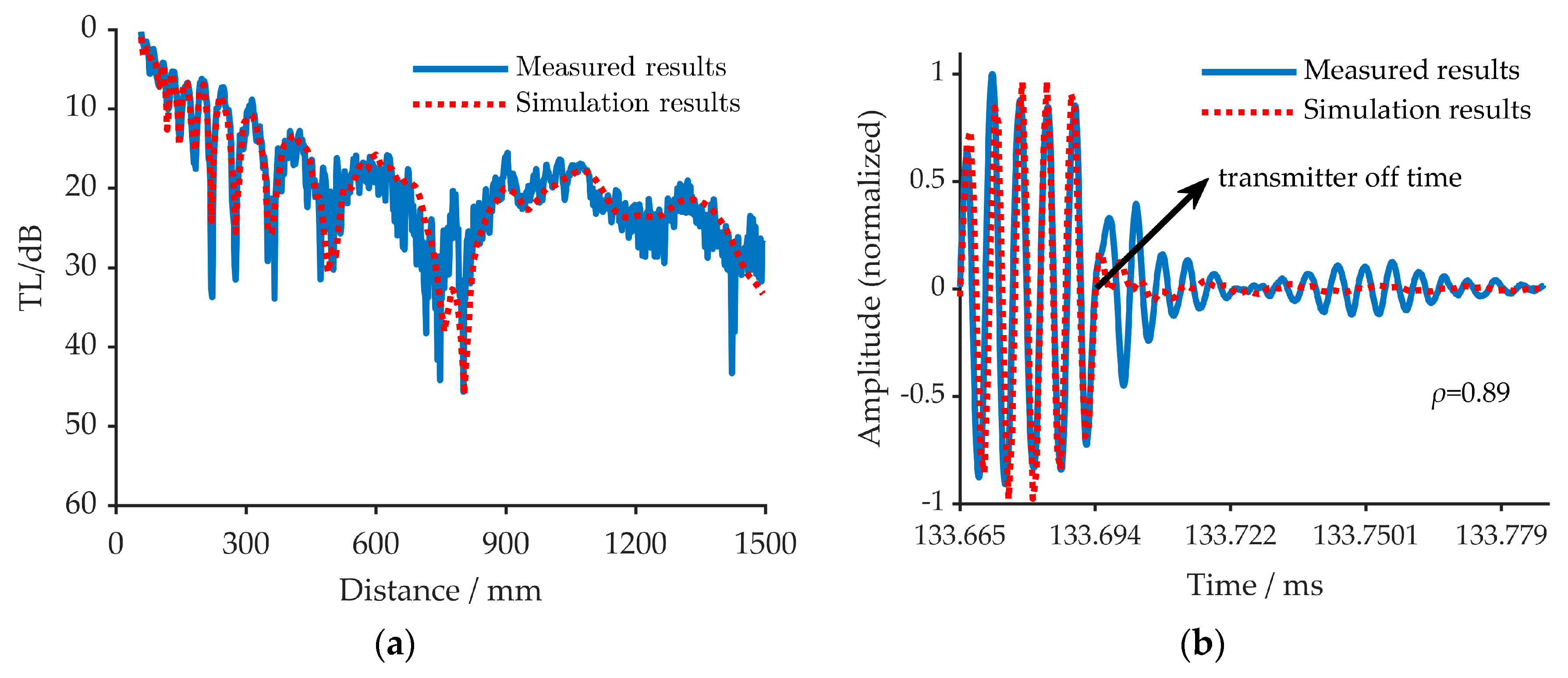
5.4. The Verification
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B. ComputationalOcean Acoustic, 2nd ed.; Am Inst. Physics: New York, NY, USA, 1994. [Google Scholar]
- Wan, L.; Badiey, M.; Knobles, D.P. Geoacoustic inversion using low frequency broadband acoustic measurements from L-shaped arrays in the Shallow sea 2006 Experiment. J. Acoust. Soc. Am. 2016, 140, 2358–2373. [Google Scholar] [CrossRef] [PubMed]
- Gao, F.; Pan, C.M.; Sun, L. Geoacoustic parameters inversion of bayes matched-field: A multi-annealing gibbs sampling algorithm. Acta Armamentarii 2017, 38, 1385–1394. [Google Scholar] [CrossRef]
- Bevans, D.A.; Buckingham, M.J.; Hursky, P. A geoacoustic inversion technique using the low-frequency sound from the main rotor of a Robinson R44 helicopter. J. Acoust. Soc. Am. 2016, 140, 3169. [Google Scholar] [CrossRef]
- Sheng, X.; Dong, C.; Guo, L.; Li, L. A bioinspired twin inverted multi scale matched filtering method for detecting an underwater moving target in a reverberant environment. Sensors 2019, 19, 5305. [Google Scholar] [CrossRef]
- Bonnel, J.; Lin, Y.T.; Eleftherakis, D.; Goff, J.A.; Dosso, S.; Chapman, R.; Miller, J.H.; Potty, G.R. Geoacoustic inversion on the New England Mud Patch using warping and dispersion curves of high-order modes. J. Acoust. Soc. Am. 2018, 143, EL405–EL411. [Google Scholar] [CrossRef]
- Li, C.Z.; Yang, Y.; Wang, R.; Yan, X.F. Acoustic parameters inversion and sediment properties in the Yellow River reservoir. Appl. Geophys. 2018, 15, 78–90. [Google Scholar] [CrossRef]
- Michalopoulou, Z.; Gerstoft, P. Multipath Broadband Localization, Bathymetry, and Sediment Inversion. IEEE J. Ocean. Eng. 2019, 1–11. [Google Scholar] [CrossRef]
- Li, X.; Piao, S.; Zhang, M.; Liu, Y. A passive source location method in a shallow sea waveguide with a single sensor based on bayesian theory. Sensors 2019, 19, 1452. [Google Scholar] [CrossRef]
- Wan, L.; Badiey, M.; Knobles, D.P. Study on parameter correlations in the modal dispersion based geoacoustic inversion. J. Acoust. Soc. Am. 2017, 141, 3487. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, R. Hybrid geoacoustic inversion method and its application to different sediments. J. Acoust. Soc. Am. 2017, 142, 2558. [Google Scholar] [CrossRef]
- Zheng, Z.; Yang, T.C.; Pan, X. Geoacoustic inversion using an autonomous underwater vehicle in conjunction with distributed sensors. IEEE J. Ocean. Eng. 2018, 1–23. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, H.; Li, Z.; Wang, X.; Ma, J. Particle Filtering for Localization of Broadband Sound Source Using an Ocean-Bottom Seismometer Sensor. Sensors 2019, 19, 2236. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, S.; Zhang, H.; Wang, X. Compressional-shear wave coupling induced by velocity gradient in elastic medium. Acta Phys. Sin. 2018, 67. [Google Scholar] [CrossRef]
- Bonnel, J.; Dosso, S.E.; Eleftherakis, D.; Chapman, N.R. Trans-Dimensional Inversion of Modal Dispersion Data on the New England Mud Patch. IEEE J. Ocean. Eng. 2019, 1–15. [Google Scholar] [CrossRef]
- Guo, X.; Yang, K.; Ma, Y. Geoacoustic inversion for bottom parameters via Bayesian theory in deep ocean. Chin. Phys. Lett. 2017, 34, 68–72. [Google Scholar] [CrossRef]
- Li, Q.; Yang, F.; Zhang, K. Moving source parameter estimation in an uncertain environment. Acta Phys. Sin. 2016, 65. [Google Scholar] [CrossRef]
- Ravenna, M.; Lebedev, S. Bayesian inversion of surface-wave data for radial and azimuthal shear-wave anisotropy, with applications to central Mongolia and west-central Italy. Geophys. J. Int. 2017, 213, 278–300. [Google Scholar] [CrossRef]
- Carlson, G.; Johnson, K.; Chuang, R.; Rupp, J. Spatially Varying Stress State in the Central U.S. From Bayesian Inversion of Focal Mechanism and In Situ Maximum Horizontal Stress Orientation Data. J. Geophys. Res. 2018, 123, 3871–3890. [Google Scholar] [CrossRef]
- Pekeris, C.L. Theory of propagation of explosive sound in shallow sea. Geol. Soc. Am. Mem. 1948, 27, 1–116. [Google Scholar] [CrossRef]
- Zhu, H.-H. Geoacoustic Parameters Inversion Based on Waveguide Impedance in Acoustic Vector Field. Ph.D. Dissertation, Harbin Engineering University, Harbin, China, 2014. [Google Scholar]
- Dinapoli, F.R. Fast Field Program for Multi-Layered Media; Naval Underwater Systems Center Newport Ri: Middletown, Rhode Island, 1971; pp. 2–10. [Google Scholar]
- Dosso, S.E.; Dettmer, J. Bayesian matched-field geoacoustic inversion. Inverse Probl. 2011, 27, 055009. [Google Scholar] [CrossRef]
- Tollefsen, D.; Dosso, S.E.; Knobles, D.P. Ship-of-opportunity noise inversions for geoacoustic profiles of a layered mud-sand seabed. IEEE J. Ocean. Eng. 2019, 1–12. [Google Scholar] [CrossRef]
- Yang, K.; Xiao, P.; Duan, R.; Ma, Y. Bayesian inversion for geoacoustic parameters from ocean bottom reflection loss. J. Comput. Acoust. 2017, 25, 1750019–1–1750019–17. [Google Scholar] [CrossRef]
- Metropolis, N. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1091. [Google Scholar] [CrossRef]
- Zheng, G.; Zhu, H.; Zhu, J. A method of geo-acoustic parameter inversion in shallow sea by the Bayesian theory and the acoustic pressure field. In Proceedings of the 2nd Franco-Chinese Acoustic Conference (FCAC2018), Le Mans, French, 29–31 October 2018. [Google Scholar]
- Zhao, W.; Chang, S. Underwater Acoustic, 2nd ed.; Science Press: Beijing, China, 1981. [Google Scholar]
- Zhu, H.; Zhu, J.; Zheng, G. A separation method for normal modes in shallow sea under near field. Acta Acust. 2019, 44, 41–50. [Google Scholar] [CrossRef]
- Liu, B.S.; Lei, J.Y. Principles of Underwater Sound, 2nd ed.; Harbin Engineering University Publications: Harbin, China, 2006. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Simulated Value |
|---|---|
| Depth H/m | 100 |
| Sound speed c1/m·s−1 | 1500 |
| Sea-water density ρ1/ g·cm−3 | 1.025 |
| P-wave speed cp/m·s−1 | 2000 |
| S-wave speed cs/ m·s−1 | 1000 |
| Seabed density ρb/g·cm−3 | 1.5 |
| P-wave attenuation αp/dB·λ−1 | 0.5 |
| S-wave attenuation αs/ dB·λ−1 | 0.5 |
| Parameters | True Values | Search Bounds | Inversion Values (Noiseless) | Inversion Values (Noisy) |
|---|---|---|---|---|
| cp/m·s−1 | 2000 | 1800, 2200 | 2000.9367 ± 14.5002 | 2001.7484 ± 25.9427 |
| cs/m·s−1 | 1000 | 900, 1100 | 996.5609 ± 9.1982 | 1000.9983 ± 11.7670 |
| ρb/g·cm−3 | 1.5 | 1.35, 1.65 | 1.5040 ± 0.0121 | 1.5063 ± 0.0152 |
| αp/dB·λ−1 | 0.5 | 0.45, 0.55 | 0.4974 ± 0.0046 | 0.5023 ± 0.0053 |
| αs/dB·λ−1 | 0.5 | 0.45, 0.55 | 0.4989 ± 0.0050 | 0.5015 ± 0.0.0067 |
| zs /mm | zr /mm | H /mm | c1/m·s−1 |
|---|---|---|---|
| 87 | 84 | 182 | 1450.212 |
| Parameters | Search Bounds | Inversion Values |
|---|---|---|
| cp/m·s−1 | 2200–2500 | 2397.3563 ± 31.9997 |
| cs/m·s−1 | 1100–1300 | 1187.9400 ± 6.8722 |
| ρb/g·cm−3 | 1.0–1.8 | 1.2451 ± 0.0758 |
| αp/dB·λ−1 | 0.1–1.1 | 0.6616 ± 0.2489 |
| αs/dB·λ−1 | 0.1-1.1 | 0.8705 ± 0.1468 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, G.; Zhu, H.; Wang, X.; Khan, S.; Li, N.; Xue, Y. Bayesian Inversion for Geoacoustic Parameters in Shallow Sea. Sensors 2020, 20, 2150. https://doi.org/10.3390/s20072150
Zheng G, Zhu H, Wang X, Khan S, Li N, Xue Y. Bayesian Inversion for Geoacoustic Parameters in Shallow Sea. Sensors. 2020; 20(7):2150. https://doi.org/10.3390/s20072150
Chicago/Turabian StyleZheng, Guangxue, Hanhao Zhu, Xiaohan Wang, Sartaj Khan, Nansong Li, and Yangyang Xue. 2020. "Bayesian Inversion for Geoacoustic Parameters in Shallow Sea" Sensors 20, no. 7: 2150. https://doi.org/10.3390/s20072150
APA StyleZheng, G., Zhu, H., Wang, X., Khan, S., Li, N., & Xue, Y. (2020). Bayesian Inversion for Geoacoustic Parameters in Shallow Sea. Sensors, 20(7), 2150. https://doi.org/10.3390/s20072150