




J. Mar. Sci. Eng. 2026, 14(11), 963; https://doi.org/10.3390/jmse14110963 (registering DOI) - 22 May 2026
Abstract
Dynamic target following in underwater environments is challenging because delayed target-state feedback, external disturbance, and model uncertainty can significantly reduce tracking performance. This paper proposes a delay-compensated predictive robust tracking method for underwater robots. A relative-following framework is first constructed by defining a
[...] Read more.
Dynamic target following in underwater environments is challenging because delayed target-state feedback, external disturbance, and model uncertainty can significantly reduce tracking performance. This paper proposes a delay-compensated predictive robust tracking method for underwater robots. A relative-following framework is first constructed by defining a reference point with a prescribed offset from the target. To reduce the adverse effect of delayed target information, a prediction mechanism is introduced for reference generation. A robust tracking controller is then designed to improve disturbance rejection and robustness against model mismatch. The proposed method is evaluated through multi-scenario simulations with progressively increased delay, target maneuverability, disturbance intensity, and uncertainty. Comparative results with PID, robust-only, and prediction-only controllers show that the proposed method achieves the smallest mean tracking error in all considered scenarios and provides more reliable tracking performance in difficult underwater conditions. The results demonstrate that the integration of delay compensation and robust control is effective for dynamic target-following tasks with delayed and uncertain target-state feedback.
Full article
(This article belongs to the Section Ocean Engineering)
►
Show Figures
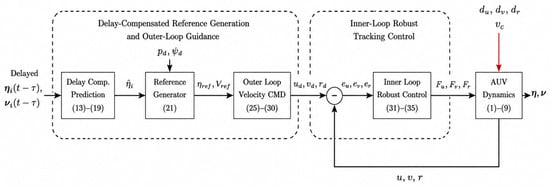
Figure 1












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}