





World Electr. Veh. J. 2026, 17(6), 323; https://doi.org/10.3390/wevj17060323 (registering DOI) - 22 Jun 2026
Abstract
For low-speed heavy-load steering of electric forklifts, conventional three-loop proportional–integral (PI) control employs a fixed saturation limit on the position-loop output. Consequently, the maximum allowable speed cannot be adjusted according to load variations. Under light-load conditions, the steering motor speed is excessively constrained,
[...] Read more.
For low-speed heavy-load steering of electric forklifts, conventional three-loop proportional–integral (PI) control employs a fixed saturation limit on the position-loop output. Consequently, the maximum allowable speed cannot be adjusted according to load variations. Under light-load conditions, the steering motor speed is excessively constrained, which wastes the available voltage margin. Under heavy-load conditions, the allowable speed may exceed the voltage limit, thereby causing voltage saturation. Moreover, load-torque feedforward compensation is commonly adopted to improve load-carrying capability. However, at medium and high speeds, excessive feedforward action may cause voltage saturation and current-vector offset. This can lead to loss of control of the steering motor. To address these issues, a voltage-limit-constrained dynamic saturation and load-torque feedforward control strategy is proposed for electric forklift steering systems. First, fuzzy PI control is adopted in the position loop. Then, considering the nearly identical direct-axis and quadrature-axis inductances of a surface-mounted permanent magnet synchronous motor (PMSM), the direct-axis current is set to zero. An analytical expression of the maximum safe speed is derived with the quadrature-axis current as the only independent variable. Based on this expression, a dynamic saturation limit is designed for the position-loop output. Finally, a reduced-order disturbance observer (DOB) is utilized to estimate the equivalent load torque in real time. The current feedforward gain is dynamically regulated according to the voltage margin. This compensates for torque limitation caused by speed-loop saturation while preventing voltage saturation. A Simulink simulation platform is developed using a forklift as the case study. The results demonstrate that, compared with the conventional three-loop PI controller, the proposed strategy reduces the no-load 180° step-response time by 30%. Under heavy-load and large-angle steering conditions, the voltage margin is maintained at approximately 10%.
Full article
(This article belongs to the Section Vehicle Control and Management)
►
Show Figures
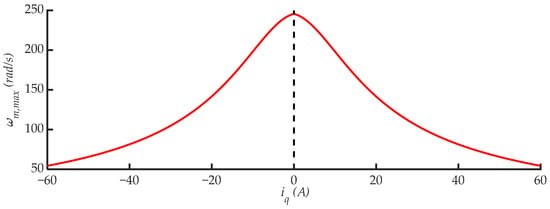
Figure 1














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}