






Biomimetics 2026, 11(5), 339; https://doi.org/10.3390/biomimetics11050339 (registering DOI) - 14 May 2026
Abstract
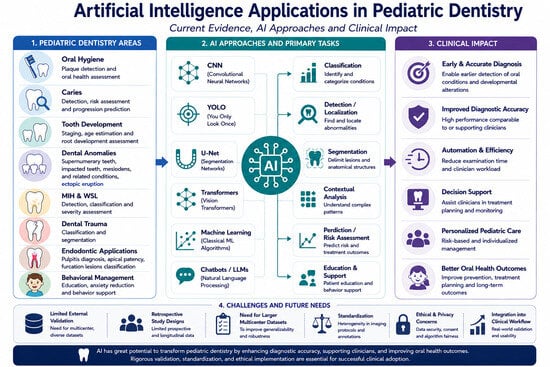
The application of artificial intelligence (AI) technologies in pediatric dentistry has expanded rapidly and is assuming an increasingly important role in the assessment of oral health and diagnostic processes in children. In particular, image-based analyses and data-driven predictive models offer significant potential to
[...] Read more.
The application of artificial intelligence (AI) technologies in pediatric dentistry has expanded rapidly and is assuming an increasingly important role in the assessment of oral health and diagnostic processes in children. In particular, image-based analyses and data-driven predictive models offer significant potential to enhance diagnostic accuracy and reduce observer-dependent variability. This review addresses AI applications in pediatric dentistry within a structured framework, summarizing the methodological foundations of machine learning and deep learning approaches while critically evaluating the current body of evidence. It further identifies key limitations in the existing literature and outlines future research priorities, aiming to provide a perspective for the safe and sustainable clinical integration of AI in pediatric dentistry.
Full article
(This article belongs to the Special Issue Artificial Intelligence (AI) in Biomedical Engineering: 2nd Edition)
►
Show Figures
Graphical abstract






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}