


Sensors, Volume 17, Issue 2 (February 2017) – 210 articles
Cover Story (view full-size image):
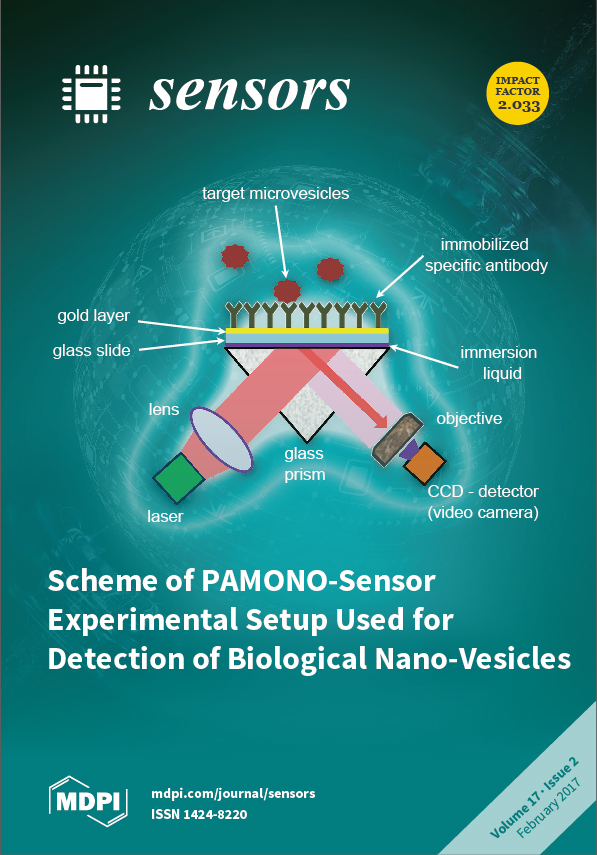
Plasmon assisted microscopy of nano-objects is a highly sensitive label-free method, which helps to detect, size, and quantify individual nano-particles. The PAMONO-sensor enables specific detection of viruses, virus-like particles and microvesicles in aquatic samples. Sensor surface functionalization with protein A/G facilitates analysis of surface markers and content of the captured biological vesicles. These features excite an interest to the PAMONO-sensor as to an analytical tool for scanning of liquid biopsy samples. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue