

Actuators, Volume 11, Issue 5 (May 2022) – 26 articles
Cover Story (view full-size image):
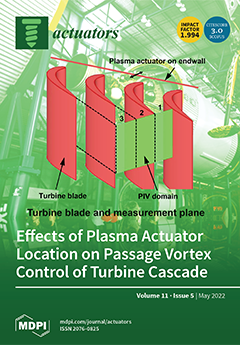
Axial flow turbines operate over a wide range of Reynolds numbers. However, at low Reynolds numbers below 1 × 105, the aerodynamic characteristics deteriorate greatly. In this study, an experiment to reduce the passage vortex was conducted using a dielectric barrier discharge plasma actuator. The plasma actuator was installed on the endwall of a linear turbine cascade. From the velocity distribution measured using particle image velocimetry, the secondary flow vector, turbulence intensity, and vorticity were analyzed. It was found that the optimum location of the plasma actuator was immediately before the blade leading edge. This is because the inlet boundary layer can be accelerated near the blade leading edge, weakening the horseshoe vortex which initially causes the passage vortex. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue