

World Electr. Veh. J., Volume 15, Issue 6 (June 2024) – 55 articles
Cover Story (view full-size image):
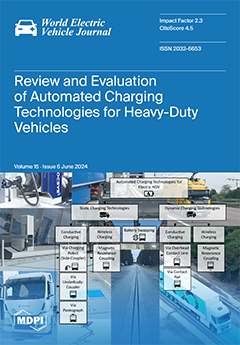
Automated charging technologies are becoming important in the electrification of road transport, especially together with automated driving. This study analyzes automated charging technologies for heavy-duty vehicles, with each technology evaluated for advantages, potential, challenges, and technological maturity. Amongst the static conductive charging methods, i.e., robots, underbody-couplers, and pantographs, the latter is the most advanced option. Static wireless charging is operational but faces efficiency challenges. Battery swapping reduces downtime but varies in readiness across implementations. Dynamic charging via an overhead contact line or contact rails is suitable for high-traffic routes. Dynamic wireless charging enables smooth integration into roads and reduced wear and tear. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue