





World Electr. Veh. J. 2026, 17(7), 355; https://doi.org/10.3390/wevj17070355 - 10 Jul 2026
Abstract
Hybrid energy storage systems combining LiFePO4 batteries and supercapacitors can reduce high-rate battery loading in battery electric mining dump trucks operating under intensive regenerative braking conditions. This study proposes a constrained multi-objective sizing methodology for a semi-active battery–supercapacitor hybrid energy storage system
[...] Read more.
Hybrid energy storage systems combining LiFePO4 batteries and supercapacitors can reduce high-rate battery loading in battery electric mining dump trucks operating under intensive regenerative braking conditions. This study proposes a constrained multi-objective sizing methodology for a semi-active battery–supercapacitor hybrid energy storage system applied to a 65 t payload-class mining electric dump truck. The model combines segment-level mining duty cycles, longitudinal vehicle dynamics, a first-order Thevenin battery representation, a usable supercapacitor energy window, bidirectional DC/DC converter limits, and constrained supervisory power splitting. Three mining duty cycles are considered: production haulage, reclamation/backfill operation, and mixed operation. The final sizing result is reported using a dimensionless usable energy buffer ratio rather than a direct comparison between supercapacitor capacitance and battery energy capacity. The results show that the required supercapacitor buffer is strongly duty cycle-dependent. For the regenerative-dominant backfill cycle, the hybrid configuration reduced peak battery charging current from approximately −950 A to −180 … −280 A and reduced battery root mean square (RMS) current by 52–64% relative to the pure battery configuration. The constrained stored fraction of regenerative energy also increased when the supercapacitor branch was included, while non-accepted braking power was assigned to the residual braking channel. The proposed approach provides a physically consistent basis for preliminary hybrid energy storage system (HESS) sizing and clarifies that battery current reduction should be interpreted as a degradation-relevant stress indicator rather than as a direct quantified lifetime prediction.
Full article
(This article belongs to the Special Issue SMART 2026: Electric Machines Drives Applied in Transportation Electrification)
►
Show Figures
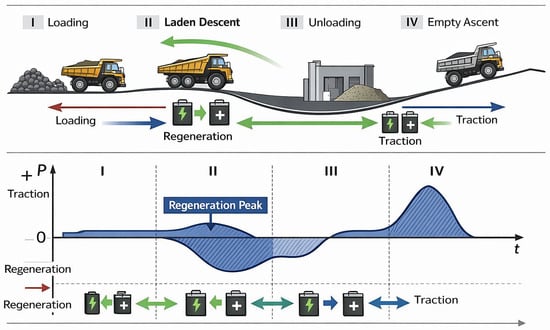
Figure 1














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}