






Biomimetics 2026, 11(8), 531; https://doi.org/10.3390/biomimetics11080531 - 31 Jul 2026
Abstract
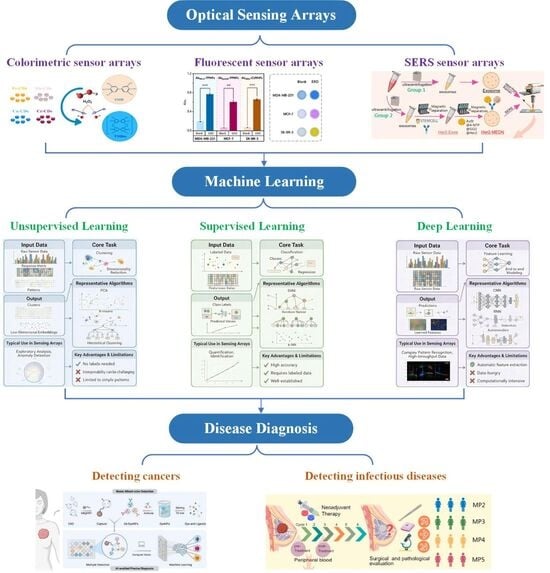
Optical sensing arrays have emerged as transformative tools for disease diagnosis, offering low-cost, rapid, and multiplexed fingerprint detection capabilities. However, the high-dimensional and complex data generated by these arrays pose significant challenges for conventional analytical methods. The integration of machine learning (ML) has
[...] Read more.
Optical sensing arrays have emerged as transformative tools for disease diagnosis, offering low-cost, rapid, and multiplexed fingerprint detection capabilities. However, the high-dimensional and complex data generated by these arrays pose significant challenges for conventional analytical methods. The integration of machine learning (ML) has advanced this field by enabling automated feature extraction, robust pattern recognition, and accurate disease classification. This review provides a systematic overview of ML-reinforced optical sensing arrays, with a particular focus on three major modalities: colorimetric, fluorescent, and surface-enhanced Raman scattering (SERS) sensor arrays. We critically evaluate how ML algorithms—encompassing unsupervised, supervised, and deep learning paradigms—synergistically enhance the diagnostic performance of each sensor modality. Representative applications are highlighted, demonstrating high accuracy in detecting cancers and infectious diseases. Finally, we discuss the pressing challenges related to data standardization, model interpretability, and clinical translation, while outlining future directions toward intelligent, point-of-care, and personalized diagnostic systems.
Full article
(This article belongs to the Section Bioinspired Sensorics, Information Processing and Control)
►
Show Figures
Graphical abstract







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}