- Article

A Multi-Modal AI System for Detecting Pedestrians Lying on the Road: Simulation-Based Safety and Injury Risk Analysis
- Nick Barua and
- Masahito Hitosugi
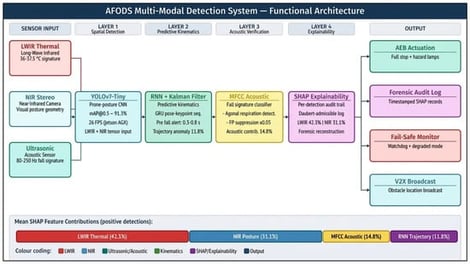
Introduction: Pedestrians lying on the road—collapsed through medical emergency, intoxication, or displacement following a prior collision—represent a disproportionately lethal and underaddressed category in road traffic safety. Forensic database analyses derived from Japan’s national police records document a fatality rate of 33.0% for collisions involving pedestrians lying on the road, more than double the rate for upright pedestrian collisions. Standard Advanced Driver-Assistance Systems (ADAS) yield a True Positive Rate (TPR) of only 21.4% for detecting pedestrians lying on the road under night conditions—a classification gap of 73.3 percentage points. Methods: In simulation trials, we evaluated the Advanced Falling Object Detection System (AFODS—where “falling object” denotes the low-profile human form at road level, distinguishing the prone pedestrian from the upright postures addressed by conventional ADAS) on a composite dataset of 3200 annotated fall events and 12,000 negative samples (training/validation), with 320 independent controlled simulation trials used for performance evaluation, spanning real-world, forensic-reconstruction, and Total Human Body Model for Safety (THUMS)-validated synthetic scenarios. No physical prototype has been evaluated; all performance data are derived from simulation, and 37.5% of positive samples are synthetically generated. These simulation conditions represent a first feasibility demonstration pending real-world hardware validation. This paper introduces three original contributions absent from prior work: a three-stage quantitative injury-risk model, a formal ISO 26262 Hazard Analysis and Risk Assessment (HARA), and a medicolegal SHAP interpretability framework. The injury-risk model translated detection latency via impact velocity to Head Injury Criterion (HIC) and estimated fatal injury probability (AIS ≥ 5); these model outputs should be interpreted as exploratory estimates pending ATD validation. Reporting follows principles consistent with the TRIPOD statement. Results: Under clear daytime conditions, AFODS demonstrated a TPR of 98.2% (95% CI: 97.4–98.8%) in simulation, decreasing to 95.6% under night dry-road conditions and 89.4% under night rain. The system achieved an AUC of 0.981 and a mean end-to-end latency of 46.5 ms, representing a 76.8 percentage-point improvement in simulation over the monocular RGB baseline (p < 0.001). The injury-risk model projects a reduction in estimated fatal head injury probability from 66.2% (Monte Carlo mean) (no detection, 50 km/h full-speed impact) to 0.7% under AFODS worst-case night/rain conditions, and to ≈0% under clear daytime simulation conditions. Conclusions: A 73.3 percentage-point classification gap places pedestrians lying on the road outside the effective detection envelope of current ADAS, compounded by the systematic exclusion of non-upright postures from regulatory test protocols and benchmark datasets. AFODS supports proof-of-concept feasibility under simulation conditions. Three translational steps are required: prototype validation on real-world hardware using instrumented Anthropomorphic Test Devices (ATDs); prone-posture biomechanical injury modelling using HIC and BrIC criteria; and regulatory extension of pedestrian AEB test standards to non-upright scenarios.
18 June 2026