3.3. Evaluation Method
In this study, a comprehensive stability evaluation function was introduced to establish a unified assessment standard across multiple indicators. This method not only enhances the objectivity and comparability of the evaluation but also helps reveal the overall trends in vehicle response, thereby avoiding biased judgments that may result from relying on a single indicator.
In the equation, represents the value of the i stability indicator under the condition corresponding to the friction coefficient μ; denotes the critical (threshold) value of the indicator under unstable conditions; represents the weight assigned to each indicator. The smaller the overall result, the better the stability—values closer to 1 indicate a higher level of danger.
Use the CRITIC method to assign values to the weights of each indicator.
Perform range normalization on each indicator to make the data dimensionless:
Calculate the Pearson correlation coefficient
:
In the formula, and represent the values of the i and j indicators for the k sample on the i and j indicators, respectively. and represent the mean values of the i and j indicators. represents the sample standard deviation of the i indicator, where the denominator is n − 1, with n being the number of samples. The sample standard deviation is used here instead of the population standard deviation because the simulation uses sample values extracted at a step size of 0.25 s rather than all the data, so the sample standard deviation better reflects the data’s dispersion.
The Pearson correlation coefficient ranges from −1 to 1, indicating the degree of linear correlation between two indicators. A value closer to 1 indicates a stronger correlation between the two indicators, while a value closer to 0 suggests no linear correlation between the indicators.
Calculate the standard deviation for each indicator:
In the formula, is the standard deviation, N is the number of data points in the dataset, represents each data point in the dataset, and is the mean of the dataset.
Next, the adjusted standard deviation is calculated, which accounts for the influence of other indicators. This step is carried out by computing the correlation of each indicator with the others and then adjusting the standard deviation accordingly.
In the formula, represents the correlation between the i and j indicators. is the sum of the squared correlation coefficients between the i indicator and all other indicators.
Finally, the weight of each indicator is calculated based on its standard deviation and its correlation with other indicators. The CRITIC method defines the weight using the following formula:
Next, the comprehensive stability evaluation function is calculated.
The stability function is averaged to represent the average instability level of the entire operating condition.
In the equation,
represents the number of operating conditions. Take the maximum value to represent the most dangerous moment for the vehicle under that wind direction angle.
From
Table 7,
Table 8,
Table 9 and
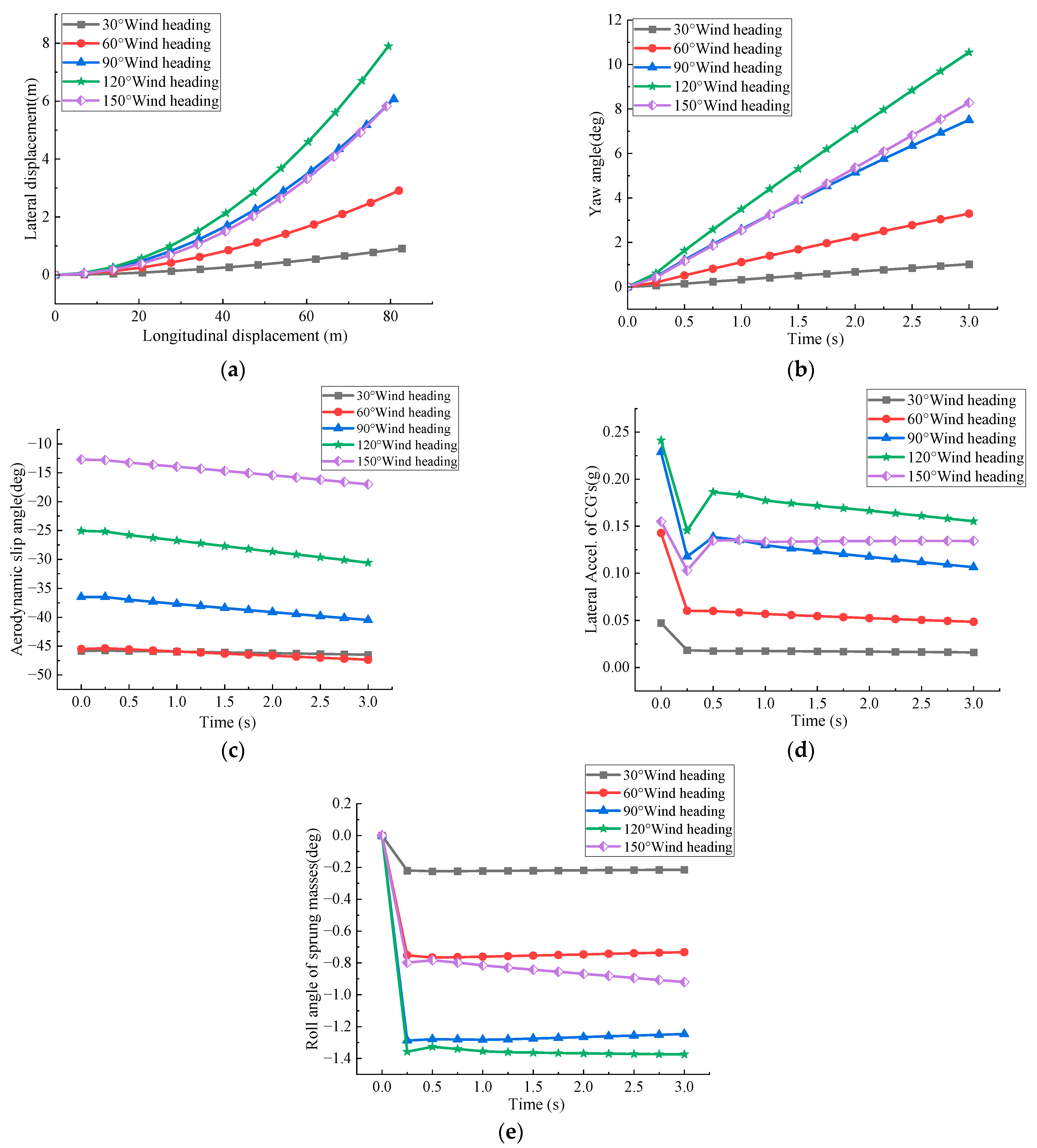
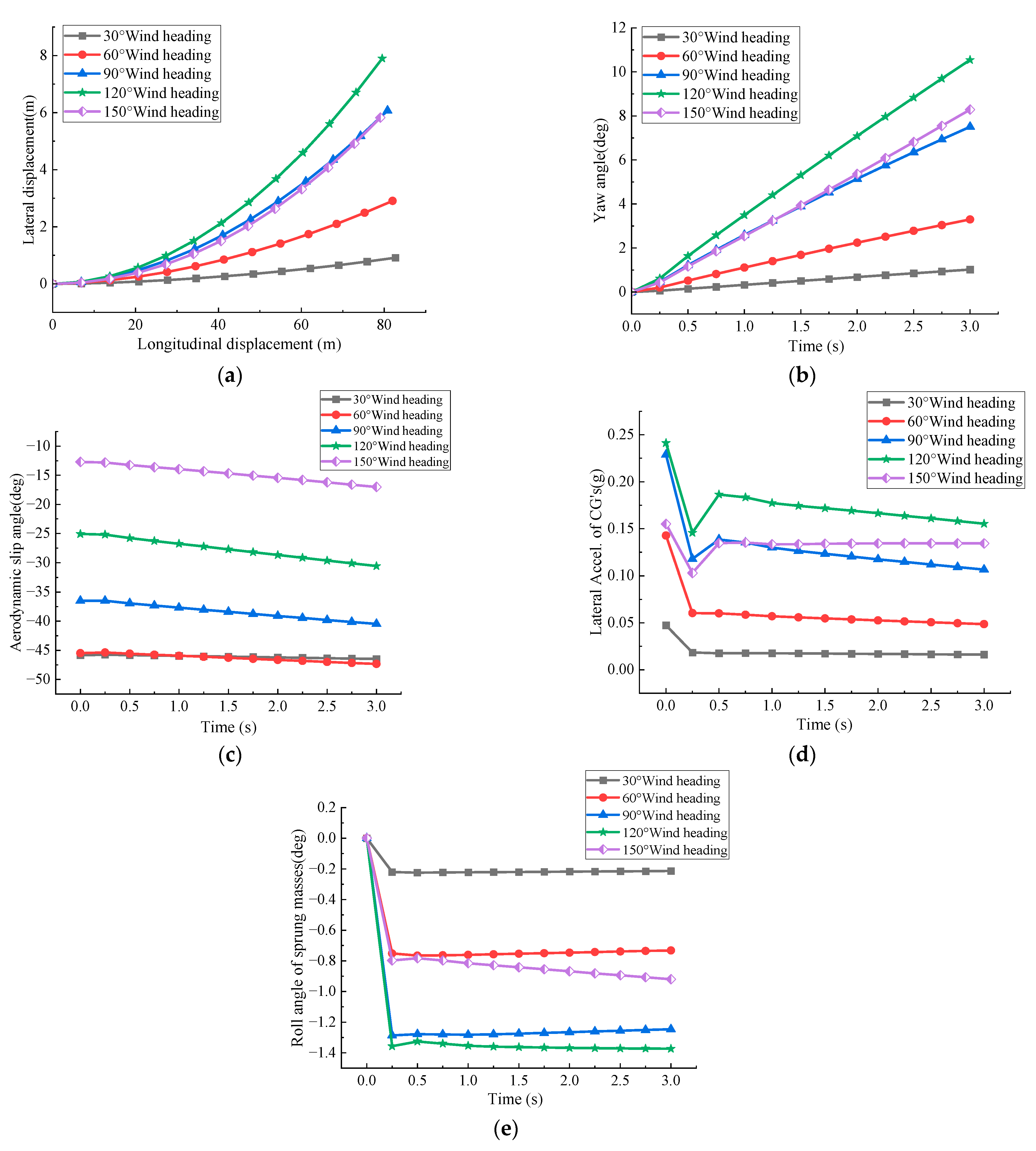
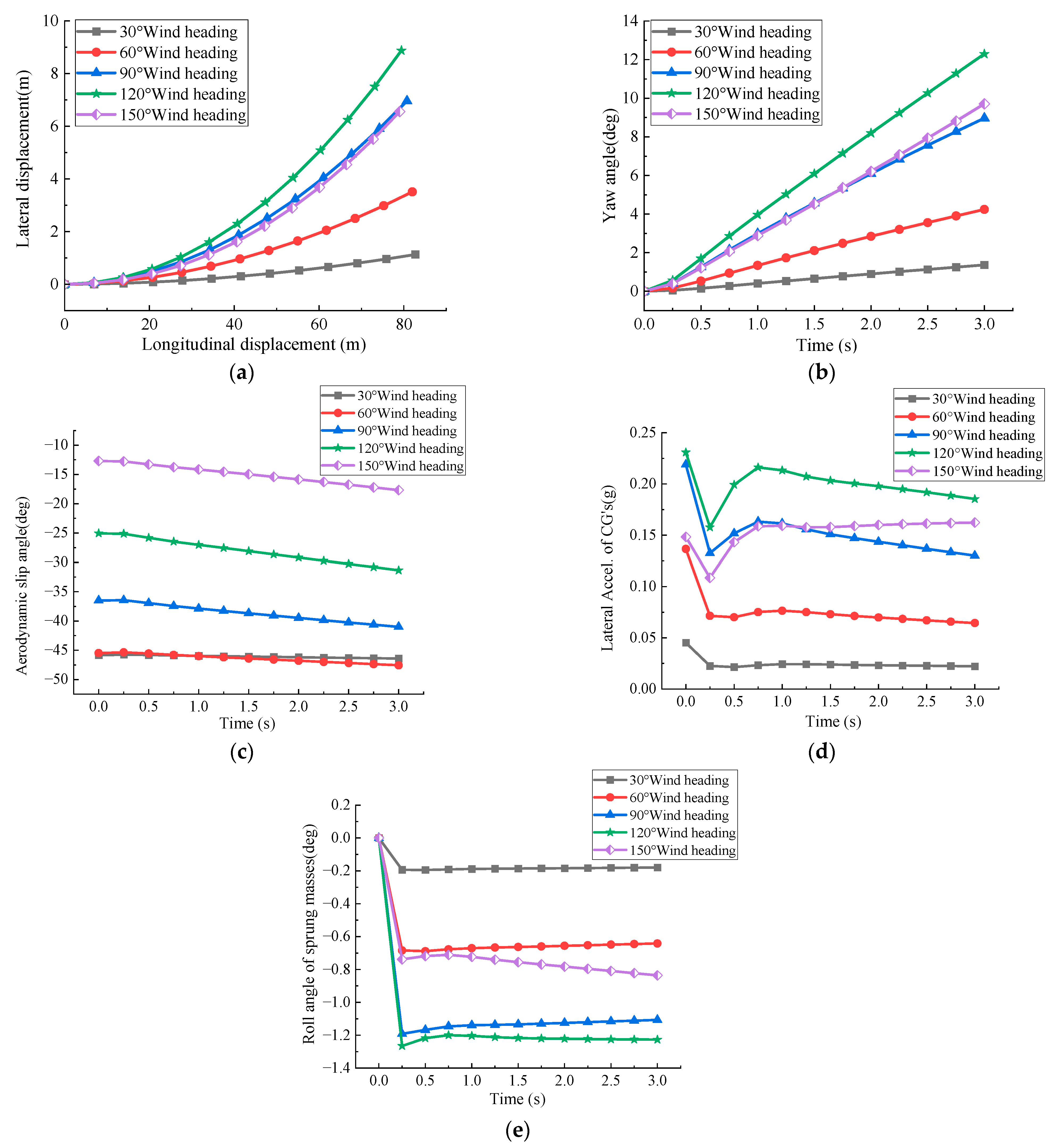
Table 10, it can be observed that the vehicle stability is worst at the beginning (0 s), then decreases, and as the wind angle increases, the stability deteriorates again. This is a normal phenomenon. In reality, it manifests as sudden vehicle shaking followed by gradual drifting. The reason is that the vehicle experiences an external disturbance suddenly, entering an unstable state due to a lack of response and inertia. Over time, and with changes in wind direction, the vehicle initially recovers stability, but as external disturbances (increasing wind angle) increase, the stability deteriorates again. The increase in sand thickness does not significantly affect vehicle stability.
There are differences in the instability performance of the vehicle at different wind angles. In most cases, the maximum instability occurs at the moment when the crosswind first acts (0 s), but at a 150° wind angle, the peak instability occurs at 3 s. This is because, at larger wind angles, the wind mainly acts on the rear of the vehicle, generating wake disturbances, and due to the lag in the aerodynamic response at the rear, instability appears later. Additionally, changes in wind speed and the response of the suspension system may also amplify the effects of wake disturbances.
The study found that, in the simulation results, the 120° wind angle had the greatest impact on most indicators, while in the comprehensive stability evaluation function, the 150° wind angle had the greatest impact on stability. This is because the 150° wind angle has the highest rate of change in various indicators. In stability analysis, it is important not only to focus on the wind angle with the largest value but also to consider the wind angle with the highest rate of change in the indicators, as it poses the greatest potential hazard to stability.
In the desert highway crosswind environment, the vehicle’s dynamic response exhibits distinct time characteristics, especially when the driver’s reaction time is no more than 3 s, requiring stability indicators to be assessed within a limited time frame. Considering factors such as lane width, vehicle structure, and driving speed, each indicator has clear physical limits. For ease of comparison, this study adopts a normalization method and divides safety levels using equal intervals, defining the critical thresholds for each indicator, as shown in
Table 11.
As previously discussed in the analysis of
Table 7,
Table 8,
Table 9 and
Table 10, in
Table 11,
Table 12,
Table 13 and
Table 14, the occurrence of dangerous values at 0 s is attributed to a sudden external disturbance, making this moment particularly hazardous. At wind angles of 120° and 150°, it is evident that beyond the initial disturbance, the vehicle reenters an unstable state over time. Due to its larger windward area and higher center of gravity, the mid-size SUV exhibits poorer crosswind disturbance resistance compared to the compact SUV. However, the mid-size SUV does not reach the danger threshold at a 30° wind angle.
Based on the threshold values in
Table 12, the boundary values for each wind direction angle at different sand thicknesses can be determined.
In this study, we simplified the analysis by treating changes in sand accumulation thickness as equivalent to changes in the road surface friction coefficient. Specifically, an increase in sand thickness typically leads to a reduction in the friction coefficient, as a thicker sand layer reduces the contact force between the tire and the road surface, thereby decreasing friction. However, under the experimental conditions of this study, variations in sand thickness did not significantly alter the friction coefficient. This may be due to the physical properties of the sand layer—such as fine particle size and low looseness—as well as the limited variation in friction under compacted conditions. Therefore, although changes in sand thickness may theoretically affect road friction, they did not result in a significant variation in the stability function value (S) in the vehicle stability analysis.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}