


Machines 2024, 12(5), 301; https://doi.org/10.3390/machines12050301 (registering DOI) - 29 Apr 2024
Abstract
This study aims to comprehensively assess the lubrication effect of leaves on wheel–rail contact dynamics using the Virginia Tech-Federal Railroad Administration (VT-FRA) Roller Rig, which closely simulates field conditions with precision and repeatability. Railway operators grapple with the seasonally recurring challenge of leaf
[...] Read more.
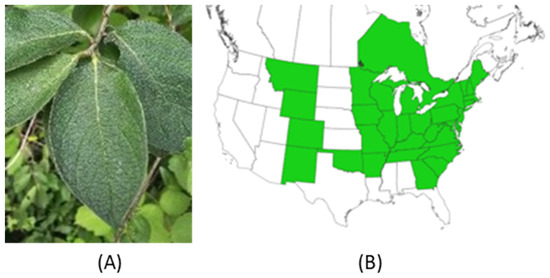
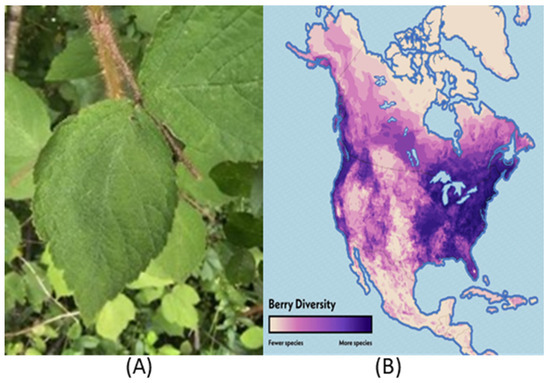
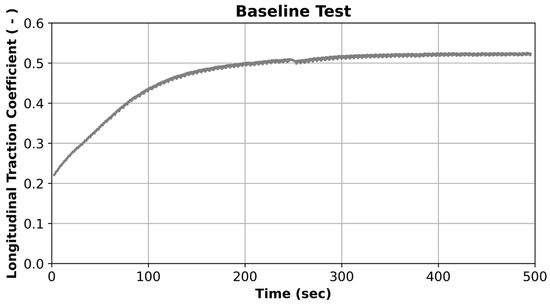
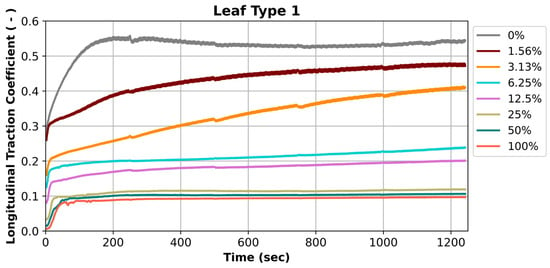
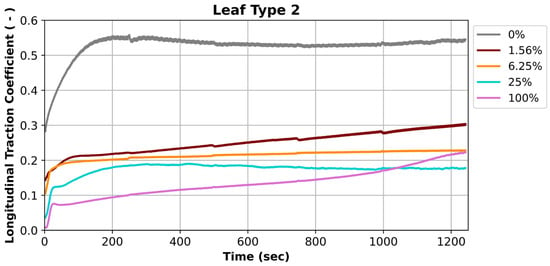
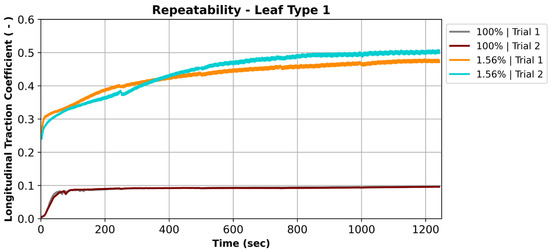
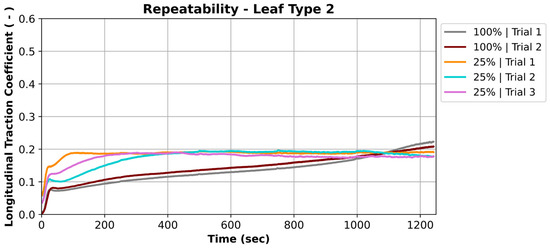
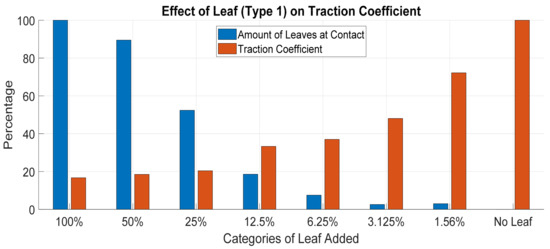
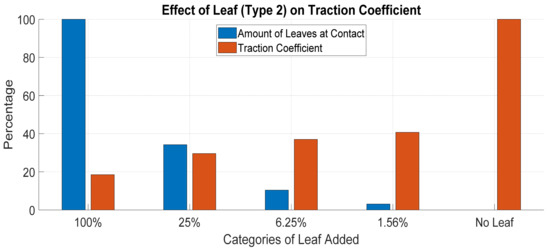
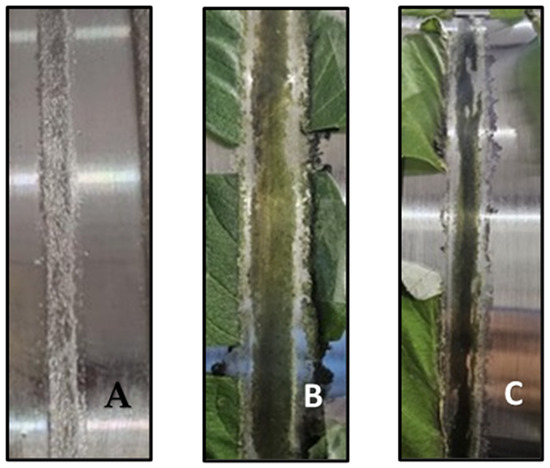
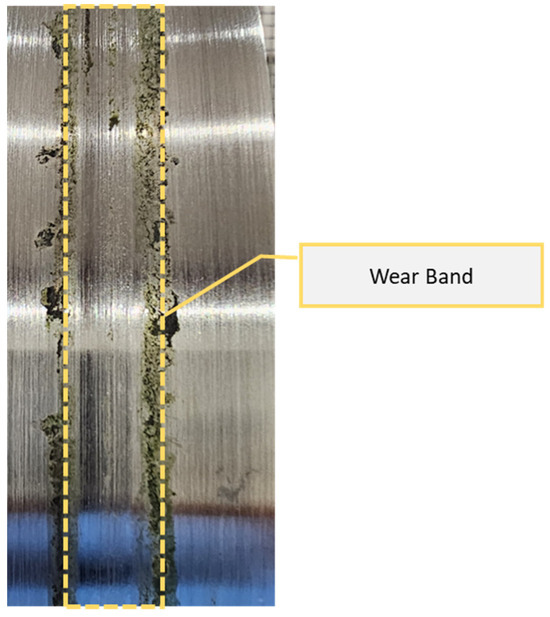
This study aims to comprehensively assess the lubrication effect of leaves on wheel–rail contact dynamics using the Virginia Tech-Federal Railroad Administration (VT-FRA) Roller Rig, which closely simulates field conditions with precision and repeatability. Railway operators grapple with the seasonally recurring challenge of leaf contamination, which can cause partial loss of braking and lead to undesired events such as station overruns. Better understanding the adhesion-reducing impact of leaf contamination significantly improves railway engineering practices to counter their effects on train braking and traction. This experimental study evaluates the reduction in traction and braking forces (collectively called “adhesion”) as a function of leaf volume, using two leaf species that commonly grow along U.S. railroad tracks. The test methods rely on the chosen leaves’ transpiration characteristics while ensuring the result’s reproducibility. Leaves were symmetrically positioned on the wheel surface, centered around the mid-rib area within the wear band, and taped on the edges far from the wear band. The critical test parameters (i.e., wheel load, wheel velocity, and percentage creepage) are kept constant among the tests. At the same time, leaf volume is reduced from a maximum amount that covers the entire wheel surface (100% coverage) to no leaves (0%). The latter is used as the baseline. The percentage creepage is kept constant at an exaggerated amount of 2% to accelerate the test time. The results indicate a nonlinear relationship between leaf volume and the loss of braking. Even a small amount of leaf contamination causes a significant reduction in adhesion by as much as 50% compared with no contamination (i.e., baseline). Increasing leaf volume results in contact saturation, beyond which adhesion is not reduced. The minimum adhesion observed in this study is 20% of the maximum adhesion that occurs when no leaf contamination is present.
Full article
(This article belongs to the Special Issue Research on Braking Systems of Railway Vehicles)
►
Show Figures
Figure 1




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}