4.1.1. Local Tuning for Improved Motion Continuity
As aforementioned, there are mathematical defects in many standard motion curves. Specifically, for the typical MS curve (
Figure 3), jerk jumps (
Jjump = 69.47) are observed at
T = 0 and 1, quirk jumps (
Qjump = 775.95) are observed at
T = 0.125 and 0.875, and a large absolute jerk |
Jimp| = 23.16 is observed at the crossover point
T = 0.5, as listed in
Table 2. Such defects can potentially induce pronounced motion impacts to high-speed transmission systems [
5,
14].
Here, to improve the motion continuity,
J(0) and
J(1) are directly reassigned as 0, and
Q(0.125) and
Q(0.875) are reassigned as the mean values of the corresponding left and right limits. Meanwhile, to minimize the crossover impact (directly proportional to |
Jimp|
1/3 [
5]), the jerk value
Jimp at
T = 0.5 is reassigned as 0. Hence, the updated four-order motion data are obtained, as shown in
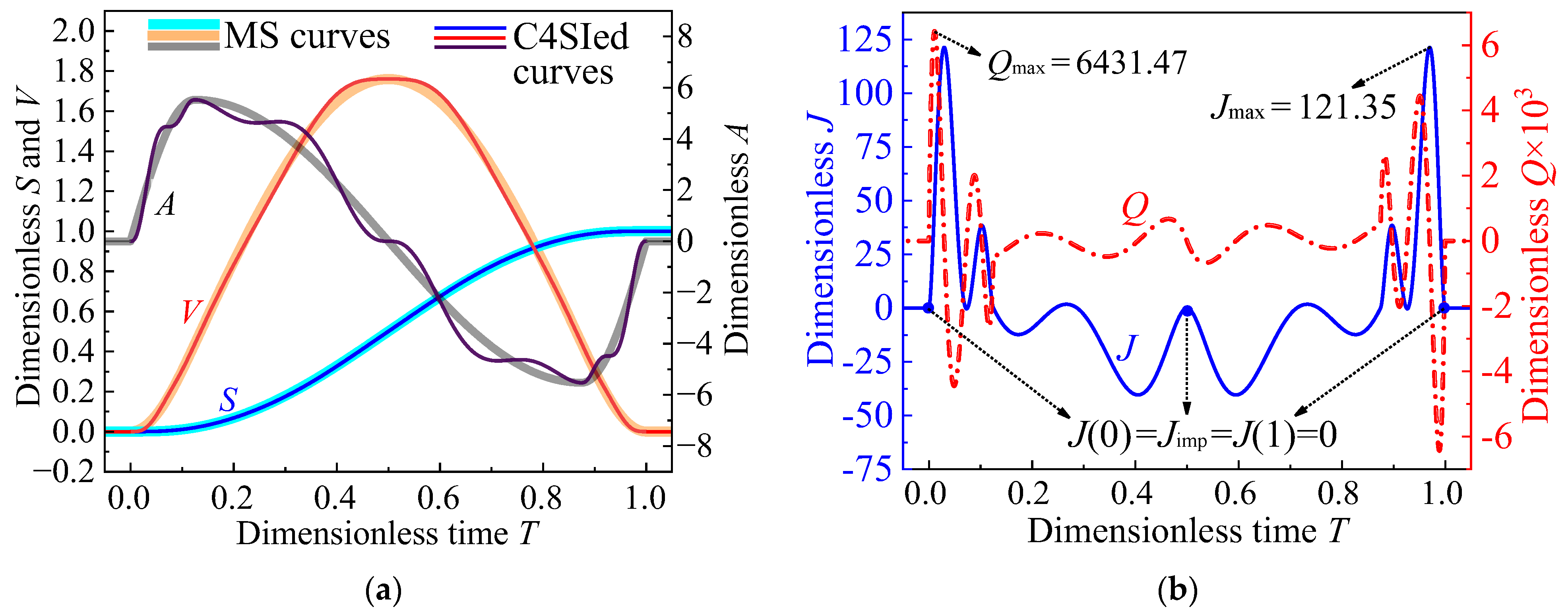
Table 3. Then, through the C4SI of these locally tuned motion data, a new four-order motion curve is reconstructed, as plotted in
Figure 5. As indicated, the interpolated motion curves are all continuous throughout the time interval, demonstrating the ultra-smooth feature (
C4 continuity) of the reconstructed motion curve. Meanwhile, the absolute value of jerk |
Jimp| at
T = 0.5 is reduced to 0, which contributes to minimized crossover impacts in shape-locked indexing cam mechanisms [
5]. Nevertheless, large jerk and quirk peaks are observed in
Figure 5b, which are not desirable in high-speed scenarios. This result indicates that improving the continuity of motion does not necessarily imply better kinematic characteristics. Actually, as suggested by Ref. [
19], considering high-order continuity may introduce additional equality (rigid) constraints, resulting in the decreased adaptability of the motion curves and increased motion peaks at unconstrained points. Therefore, the key to achieving better kinematic characteristics lies in the global optimal tuning of the high-order motion parameters, which will be demonstrated in the next subsection.
4.1.2. Global Kinematics Optimization for Minimized Motion Peaks
The kinematic optimization of the motion curve is a min–max problem involving the minimization of the maximum absolute motion characteristic value, where the global motion peak of primary concern is typically taken as the objective function [
7,
14]. However, in case-specific applications where the motion curves are complex functions involving undetermined parameters, it would be challenging to derive the analytical expression of the target motion peak, resulting in considerable difficulties in evaluating the objective function.
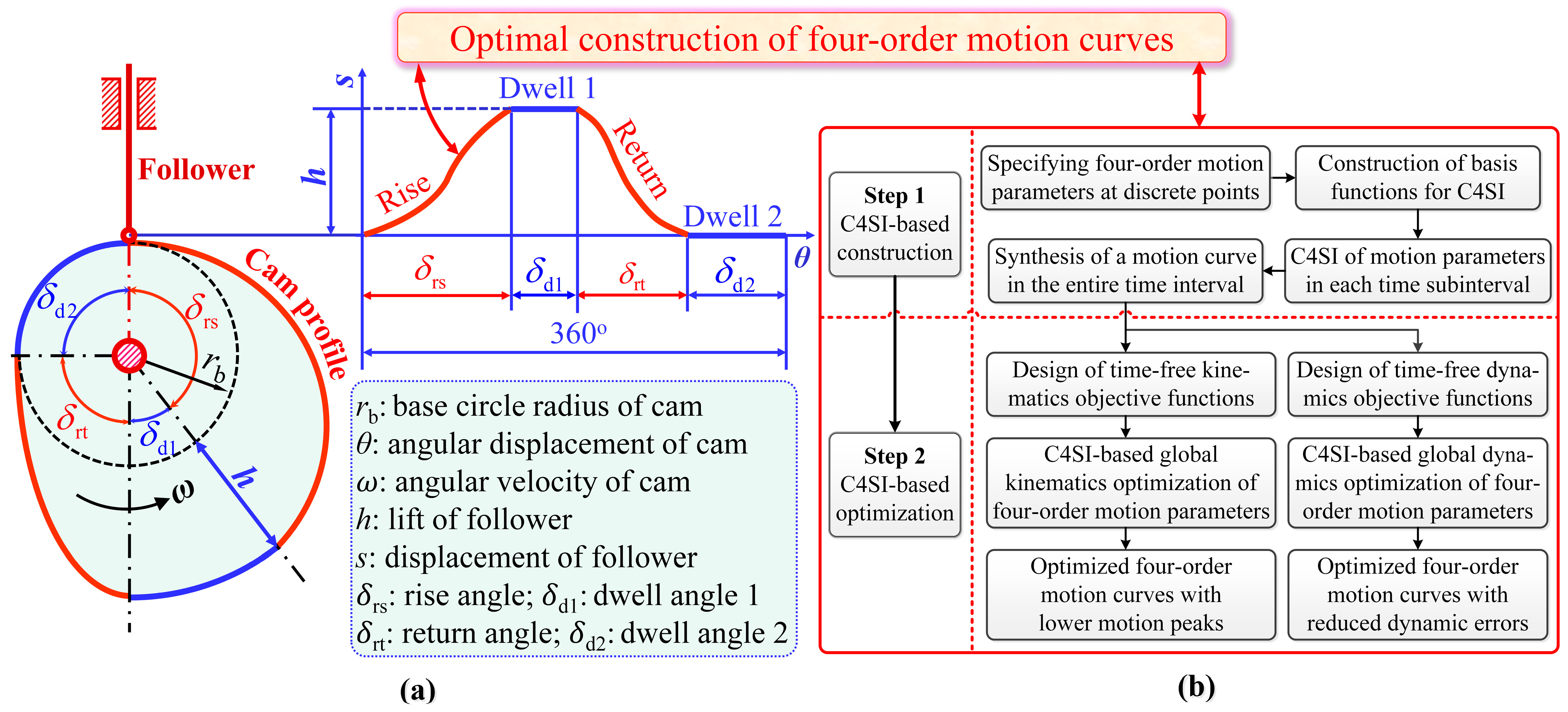
To address the above challenge, this study proposes a facile C4SI-based global kinematics optimization strategy based on the definite integral relations between the motion peaks and the derived motion functions. Specifically, for the typical MS curve (
Figure 3), the definite integral relation between the displacement peak
Smax and the velocity function
V(
T) can be determined as the following:
That is, the displacement peak
Smax can be determined using the area between the velocity function
V(
T) and the time coordinate
T. Evidently, this relation applies to almost arbitrary non-dimensionalized motion curves [
6], where the displacement functions increase monotonically from 0 to 1 as
T rises from 0 to 1. Similarly, the definite integral relation between the velocity peak
Vmax and the acceleration function
A(
T) of the MS curve in
Figure 3 can be determined as the following:
where
TAE = 0.5 is the only extreme point at which the acceleration function
A(
T) = 0.
Using Equation (13), the integral expression of the velocity peak
Vmax in the entire time interval [0, 1] can be derived as the following:
Notably, Equation (14) also applies to most of the motion curves (e.g., MS, MT, and MCV), with only one velocity peak in the time interval [0, 1]. Further, the definite integral relation between the acceleration peak
Amax and the jerk function
J(
T) of the MS curve in
Figure 3 can be derived as the following:
where
TJE1 = 0.125 and
TJE2 = 0.875 are the two extreme points at which the jerk function
J(
T) = 0. Note that in addition to the MS curve, Equation (15) also applies to typical symmetrical motion curves (e.g., MT, MCV, and standard quintic polynomials) with two opposite acceleration peaks in the entire time interval.
The applicability of the above definite integral relations in a variety of typical motion curves [
20] are summarized in
Table 4. Based on its overall applicability, either Equation (14) or Equation (15) can be adopted as the candidate objective function for kinematics optimization. Furthermore, since the derived motion functions (such as
A(
T) and
J(
T)) are integrable (see Equations (2) and (3)), their definite integrals can be free of the time variable
T and its power terms (e.g.,
T2,
T3, …). That is, either
Vmax or
Amax (the candidate objective function) can be taken as the linear combination of the nodal motion parameters. These relations transform the complex time-varying non-linear kinematics optimization problem (min–max problem) into a route time-free linear programming problem, which can be handily resolved using conventional simplex or interior point methods.
To validate the proposed strategy, the global kinematics optimization of the reference motion curve (MS curve) is performed. Due to the good smoothness of the MS curve, it is difficult to achieve a simultaneous reduction in its multiple motion peaks [
7]. As such, the integral expression of the acceleration peak
Amax (Equation (15)), for instance, is defined as the primary objective function, which leads to the following global kinematics optimization model:
In Equation (16), the displacement parameters
Si are fixed to retain the basic positioning requirements, while the higher-order motion parameters (
Vi,
Ai,
Ji, and
Qi) are allowed to be adjusted, in whole or in part, for kinematics optimization. The raw four-order motion parameters for global kinematics optimization are listed in
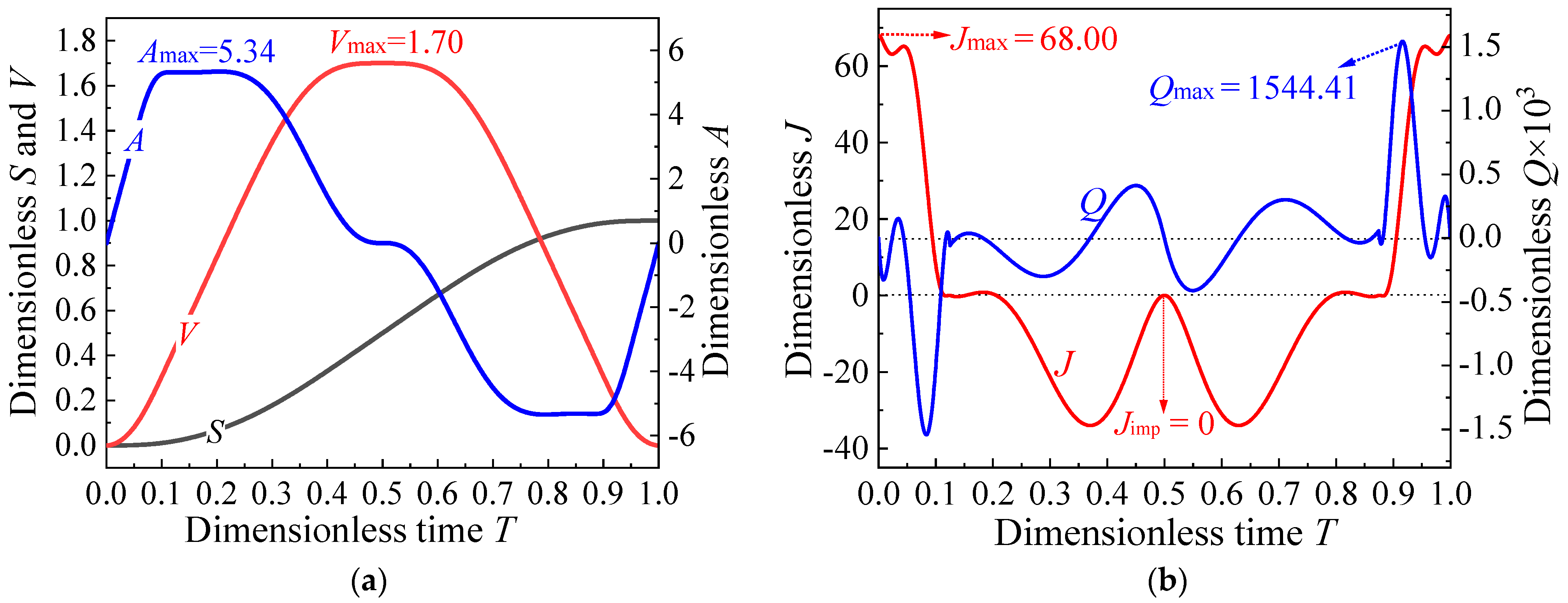
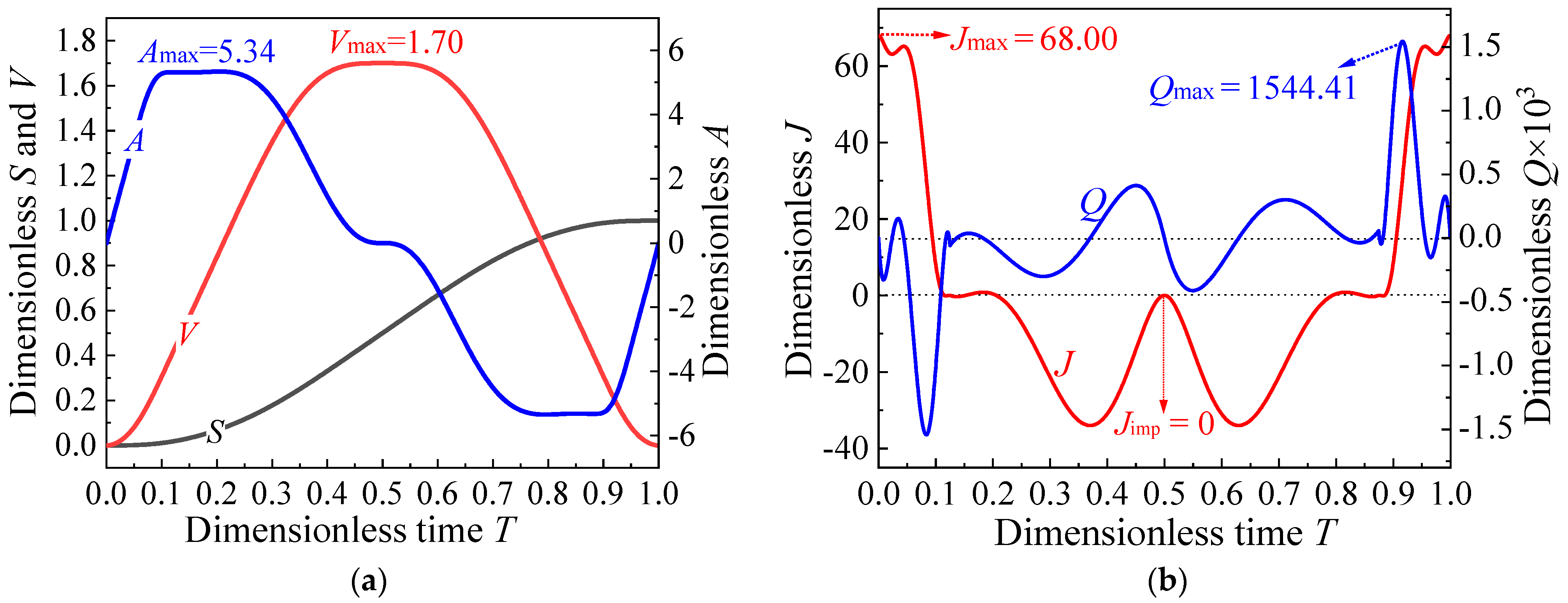
Table 5. Note that the velocity and jerk peaks are, respectively, specified as
Vmax = 1.70 and
Jmax = 68.00, both of which are smaller than the original peaks.
Through the C4SI of the motion parameters (including both variables and constants) in
Table 5, a flexible four-order motion curve can be created. Then, through the global kinematics optimization of the flexible motion curve using Equation (16), the optimal motion parameters can be determined. Finally, through the re-C4SI of the optimized motion parameters, an optimal four-order motion curve is obtained, shown in
Figure 6. As indicated, the motion characteristic values of the optimized motion curve are
Vmax = 1.70,
Amax = 5.33,
Jmax =
Jjump = 68.00, |
Jimp| = 0, and
Qjump = 0, which are all smaller than those of the original MS curve (
Table 6). This simultaneous reduction in five motion characteristic values represents a significant kinematics improvement in the MS curve, which is a challenging task for conventional kinematics optimization methods [
7,
14]. Based on these optimization outcomes, the feasibility and effectiveness of the proposed global kinematics optimization strategy were confirmed.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}