- Article

Dynamic Parameter Identification of a Hip Exoskeleton Using RLS-GA
- Wentao Sheng,
- Yunxia Cao and
- Tianyu Gao
- + 2 authors
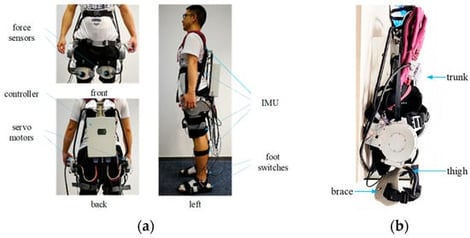
Lower-limb exoskeletons require accurate dynamic models to achieve stable and compliant human–robot interactions. However, least-squares-based identification often relies on demanding experiments and may yield limited accuracy for exoskeletons with non-standard structures and actuator-induced uncertainties. This paper proposes a two-stage dynamic parameter identification method that integrates recursive least squares (RLS) and a genetic algorithm (GA), denoted as RLS-GA. RLS is first executed offline to estimate the variation ranges of the inertial parameter vector and to construct a finite, physically meaningful search space. GA then refines the parameters within these bounds by minimizing the regression residual norm. Experiments on a hip exoskeleton show that RLS-GA achieves higher identification accuracy than LS and unconstrained GA, while converging faster than GA under identical conditions.
6 February 2026