- Review

3D Skeletal Scaffolds of Marine Keratosan Demosponges Origin as Renewable Sources for Bioinspiration in Modern Structural Biomimetics and Tissue Engineering
- Hermann Ehrlich,
- Jagoda Litowczenko and
- Krzysztof Nowacki
- + 21 authors
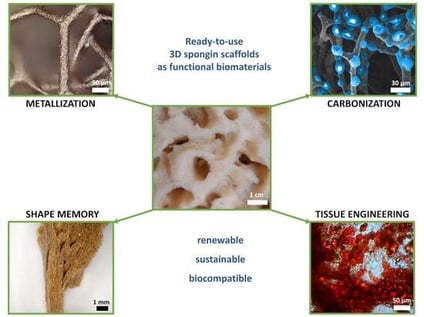
This experimental review discusses evolutionarily approved, naturally pre-designed skeletal architectures of marine keratosan sponges in the form of 3D scaffolds, which have garnered increasing interest in the fields of structural and functional biomimetics as well as in tissue engineering. It has been demonstrated that these renewable, ready-to-use natural scaffolds can undergo further modifications through specialized treatments such as metallization and carbonization, enabling the creation of functional biomaterials while maintaining the species-specific hierarchical 3D structure. The study presented remarkable findings, including the demonstration of the unique shape-memory behavior of these scaffolds even after two months of exposure to high mechanical pressure at temperatures exceeding 100 °C. Additionally, the cytocompatibility and biological performance of natural and carbonized (1200 °C) spongin scaffolds, derived from selected bath sponges, were comparatively investigated with respect to growth and proliferation of human MG-63 osteoblastic cells. Understanding whether carbonization universally enhances osteogenic capabilities or selectively amplifies the inherent architectural advantages remains to be critical for the rational design of sponge-derived scaffolds in bone and structural tissue engineering applications.
7 February 2026