

Machines, Volume 11, Issue 2 (February 2023) – 192 articles
Cover Story (view full-size image):
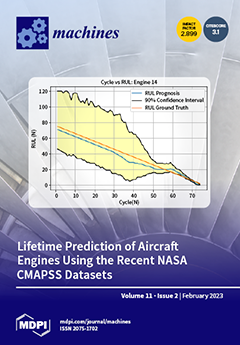
An algorithm to predict the remaining useful life (RUL) of aircraft engines using the recently published NASA CMAPPS datasets has been developed. The algorithm comprises feature selection using a hybrid metric, the Logistic Regression for health index estimation, and the Unscented Kalman Filter (UKF) for predicting the RUL in a recursive fashion. Among the available datasets, dataset 02 is chosen because it has been widely used and is an ideal candidate for result comparison, and dataset 03 is employed as a new state-of-the-art dataset. As a result, the developed algorithm yields 34.5–55.6% better performance in terms of the Root Mean Squared Error (RMSE) compared with the previous works. More importantly, the proposed method is explainable and transparent. In addition, it quantifies the uncertainty during the prediction process. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue