
Dynamic Parameter Identification of Collaborative Robot Based on WLS-RWPSO Algorithm



Abstract
1. Introduction
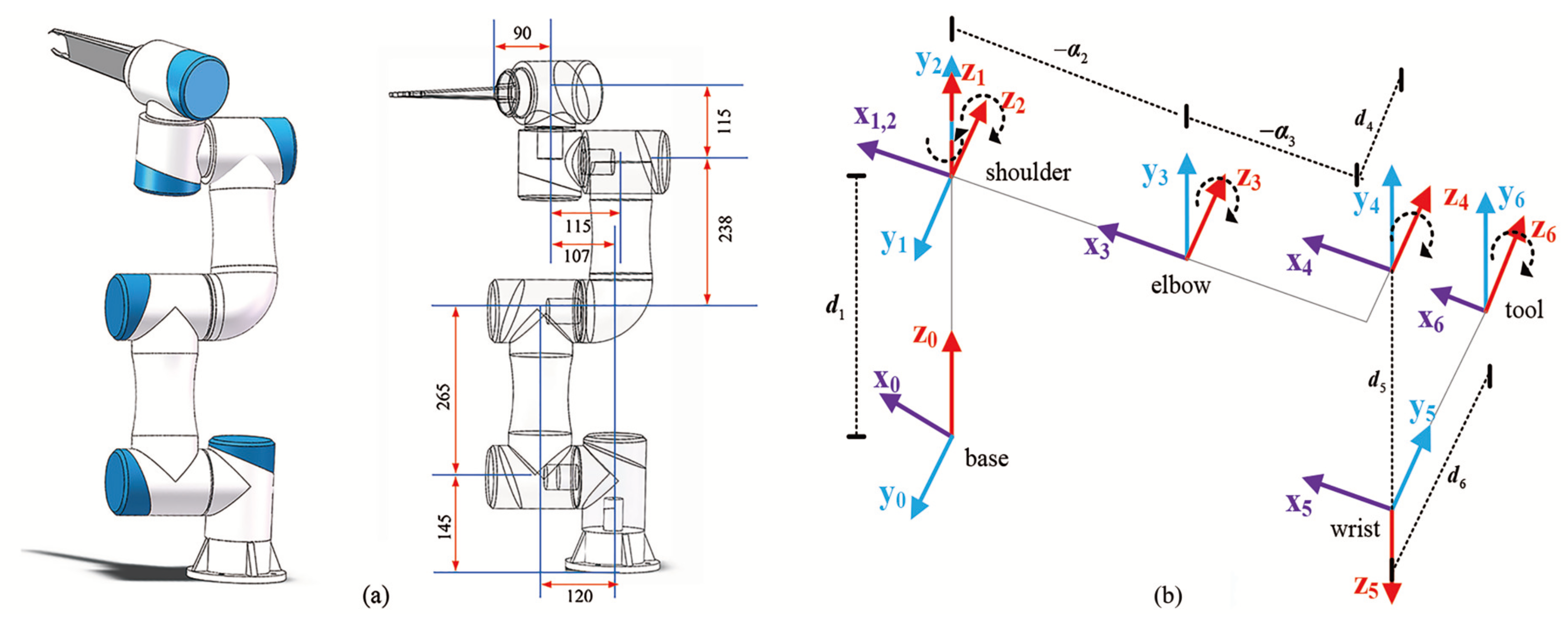
2. Robot Dynamics Modeling
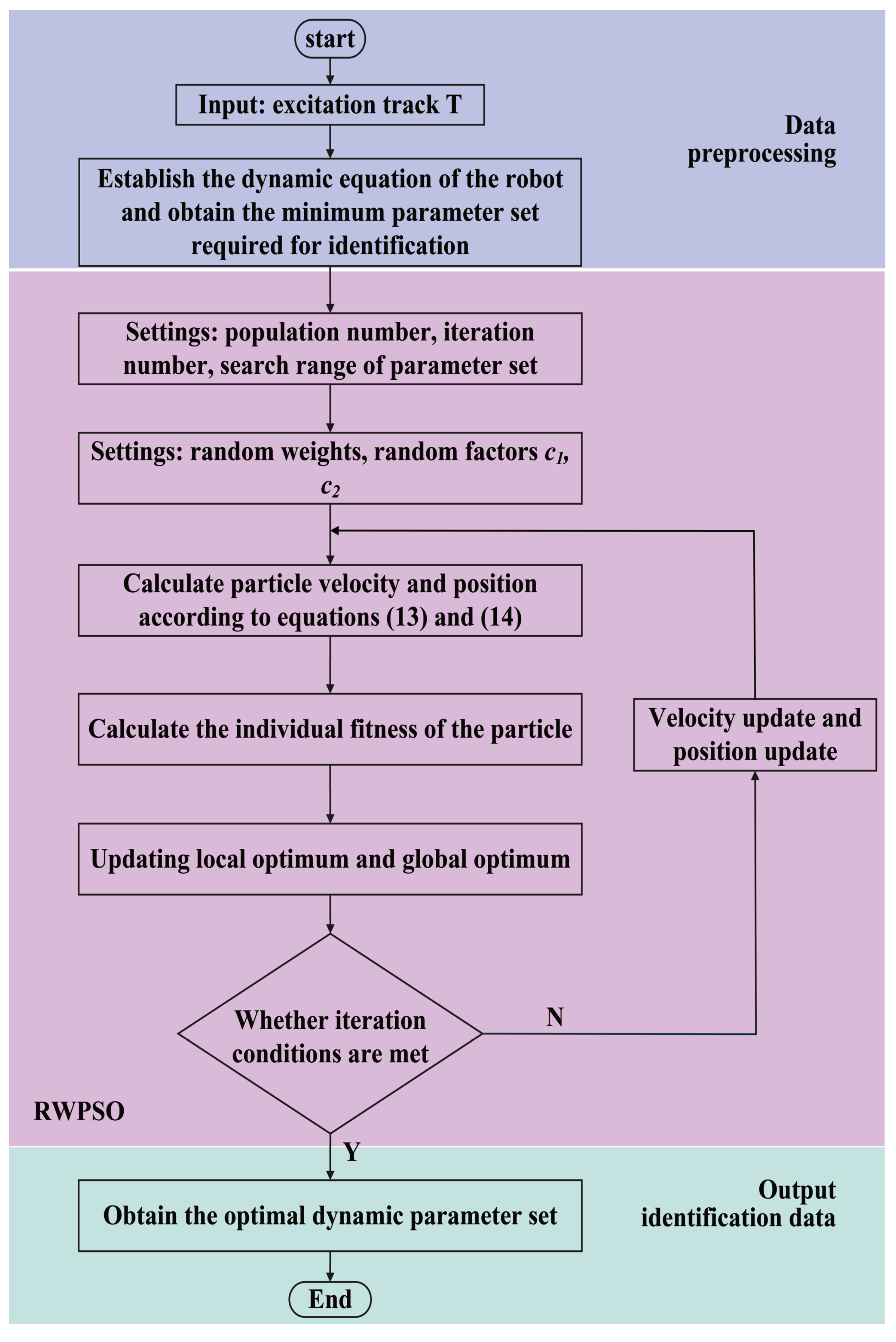
3. WLS-RWPSO Identification Algorithm
3.1. Weighted Least Squares Algorithm
3.2. Basic Particle Swarm Algorithm
3.3. Particle Swarm Algorithm Based on Random Weight
3.4. Stability and Convergence Analysis of Random Weight Particle Swarm Algorithm
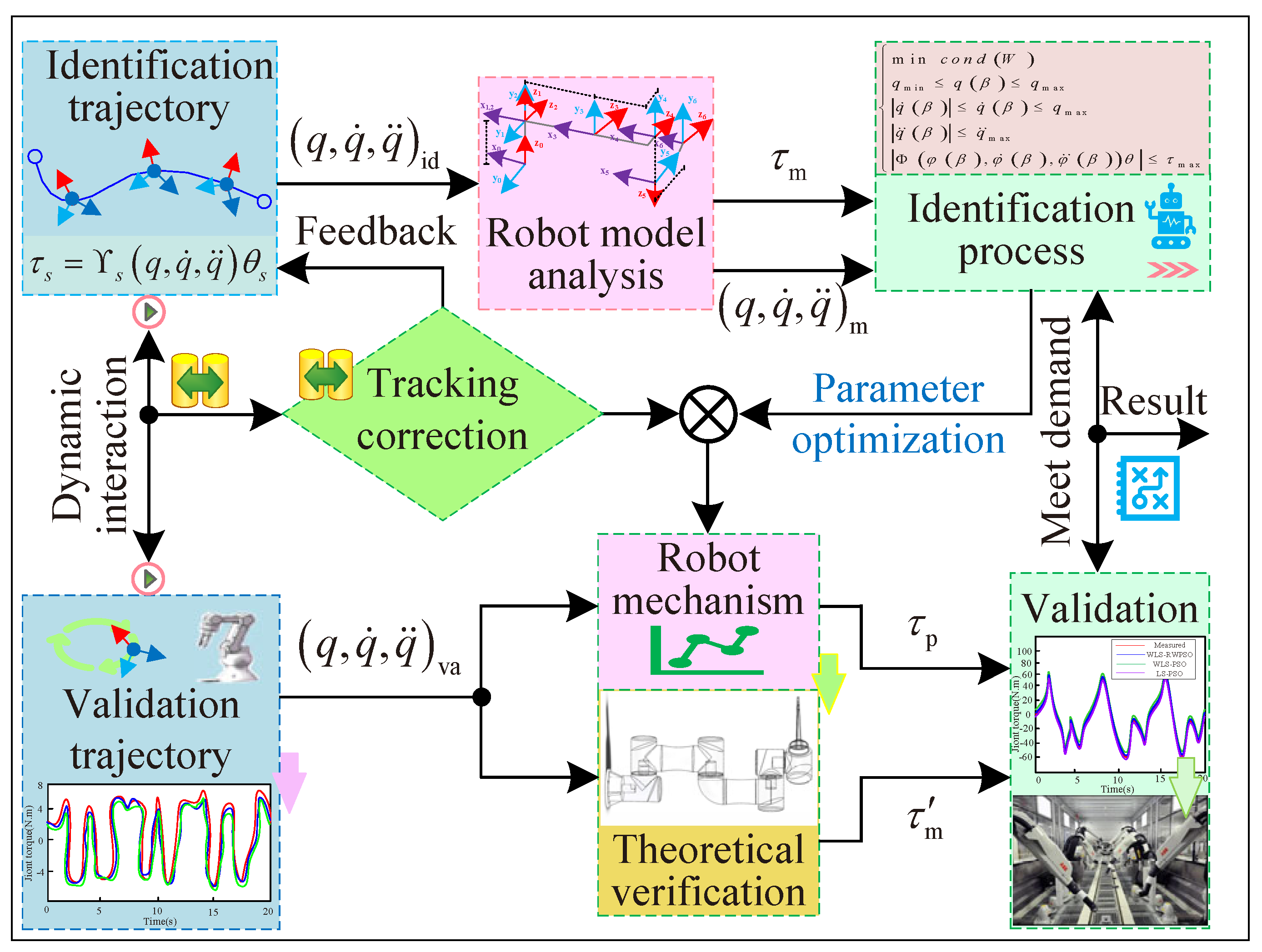
4. Identify Experimental Design
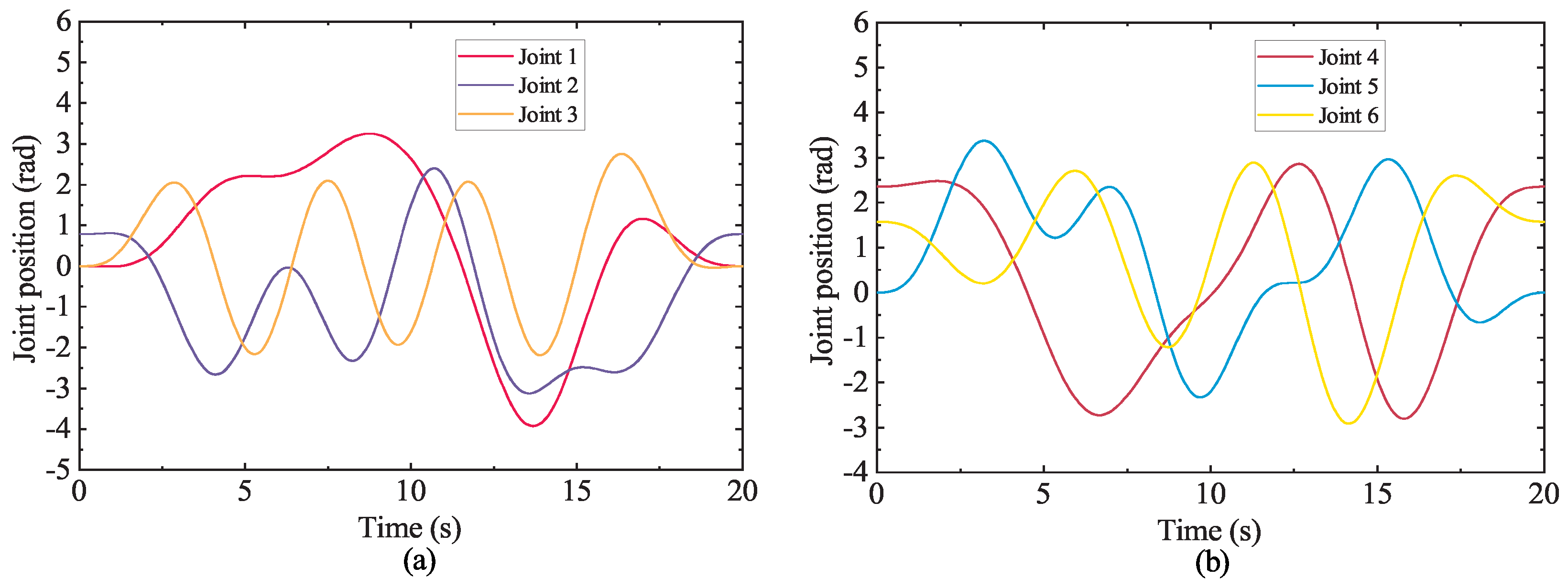
4.1. Design of Excitation Trajectory
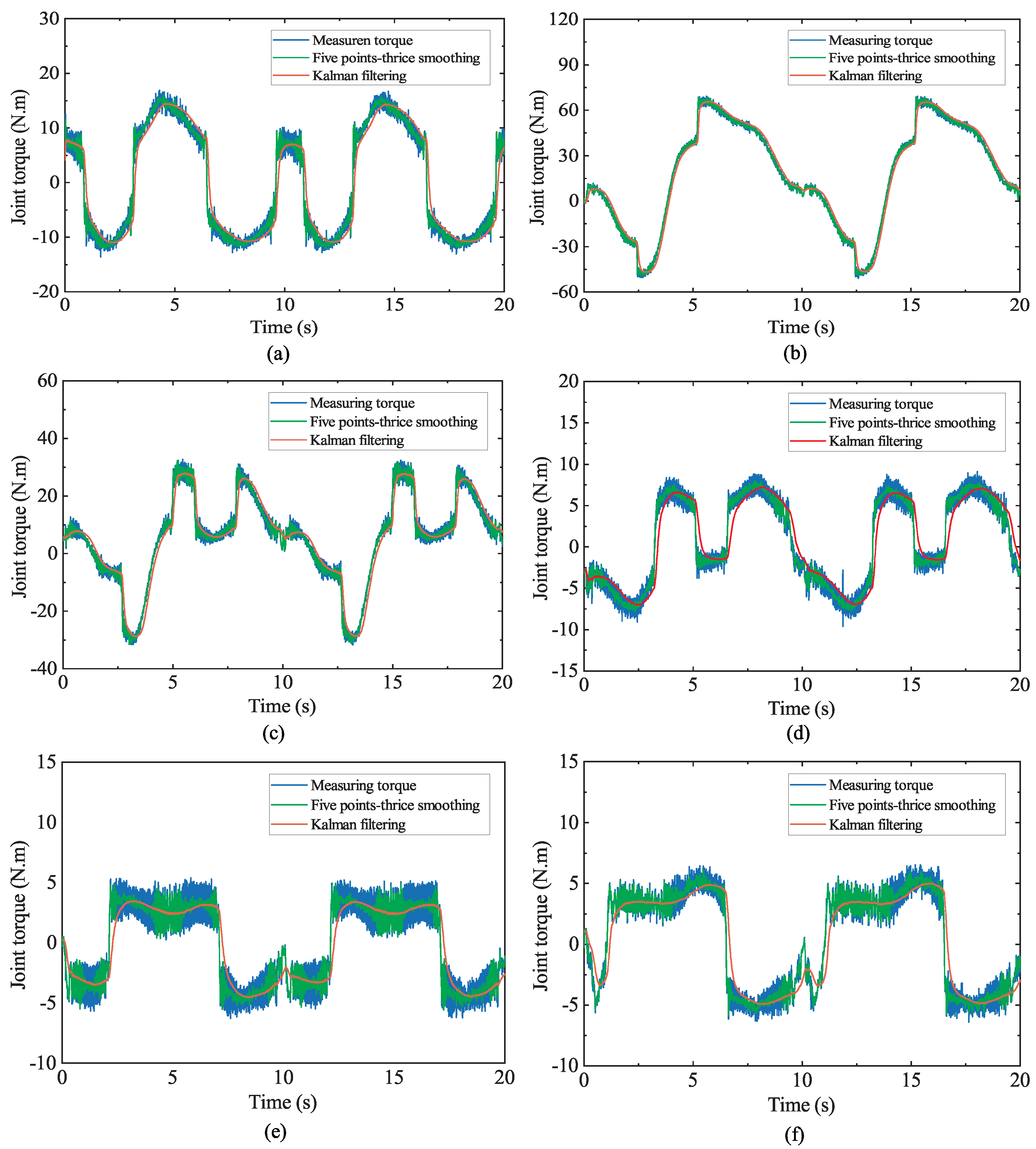
4.2. Data Preprocessing
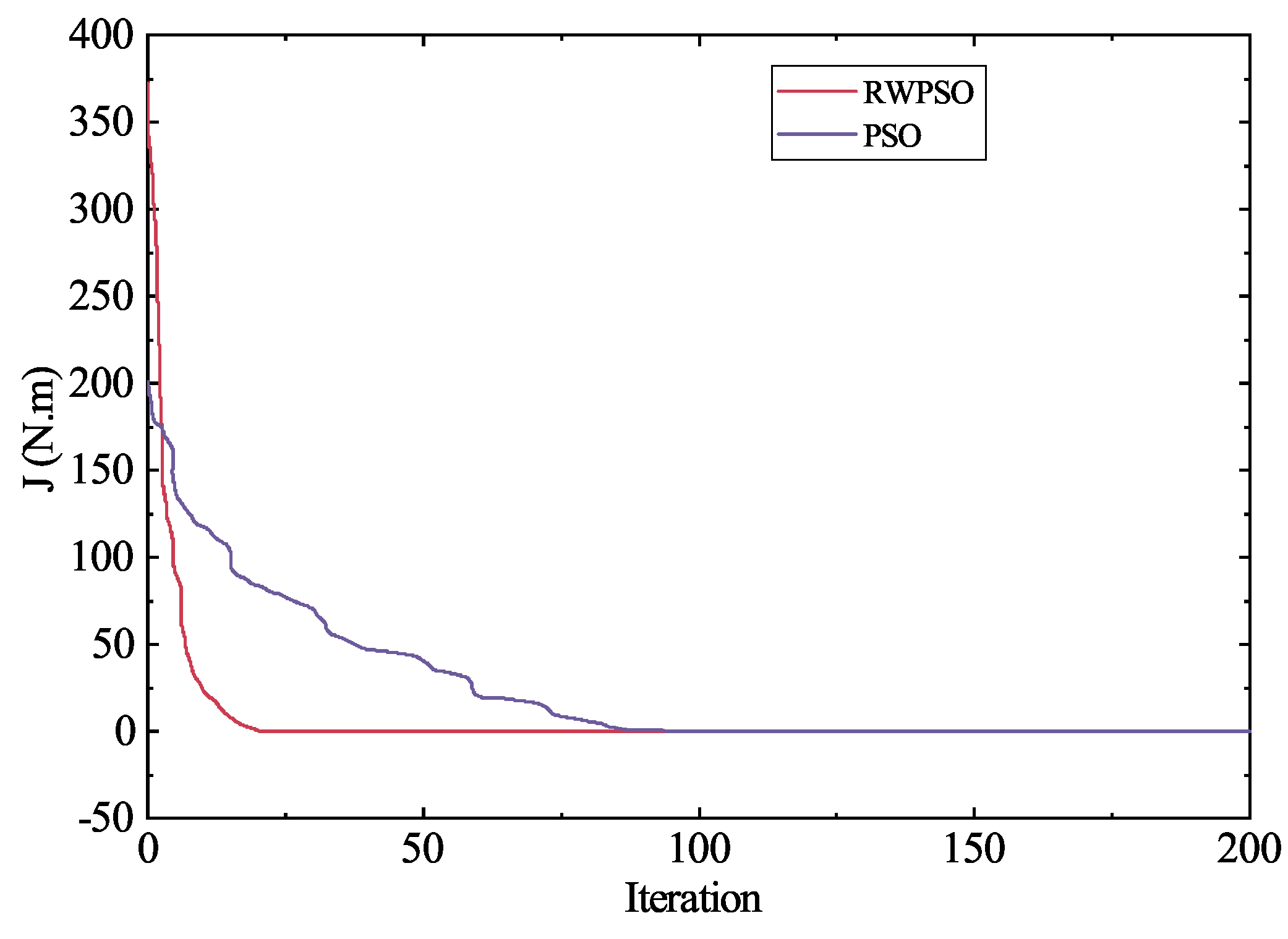
5. Experimental Results and Analysis
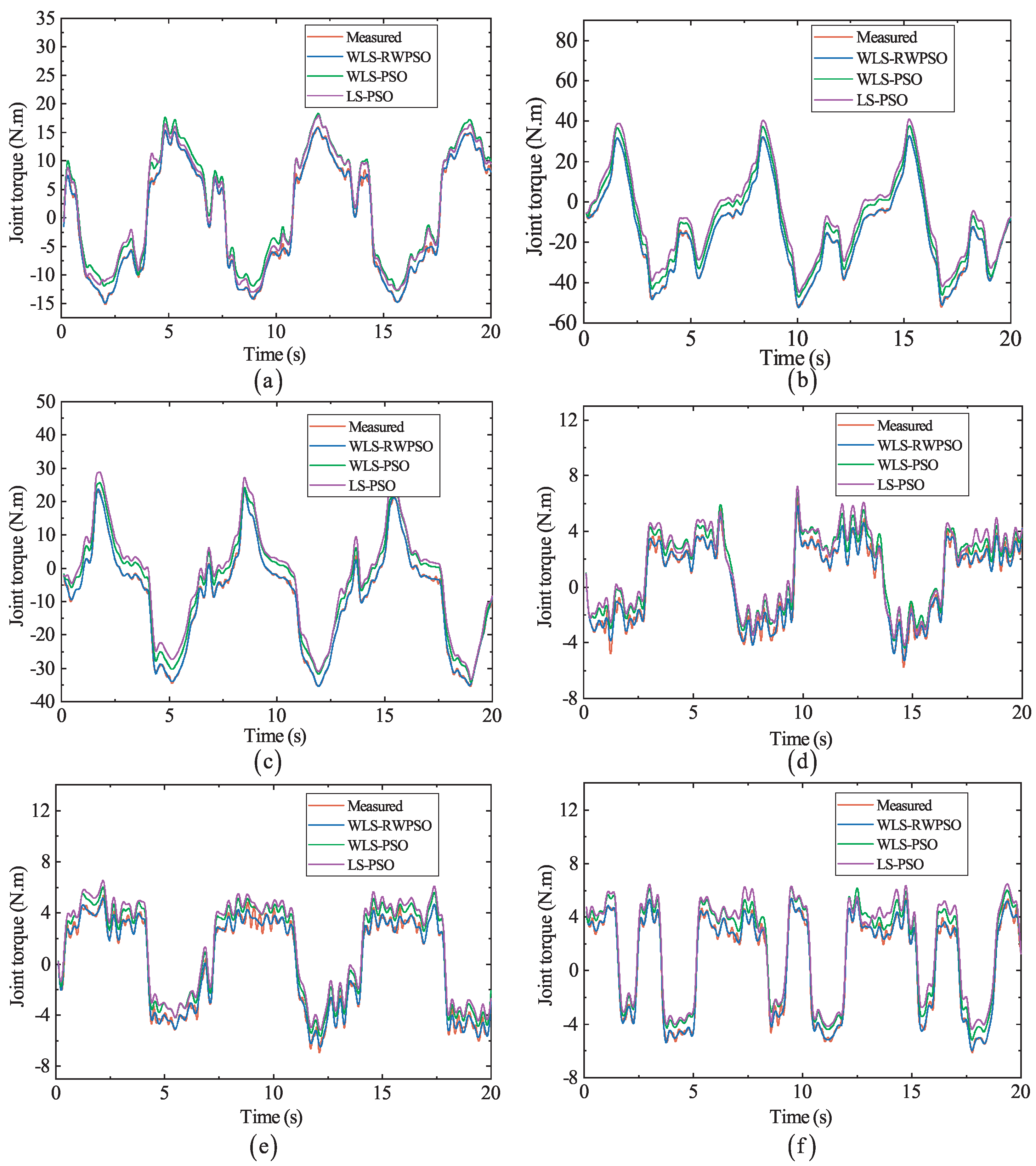
5.1. Simulation Verification of Structure Simplification Results
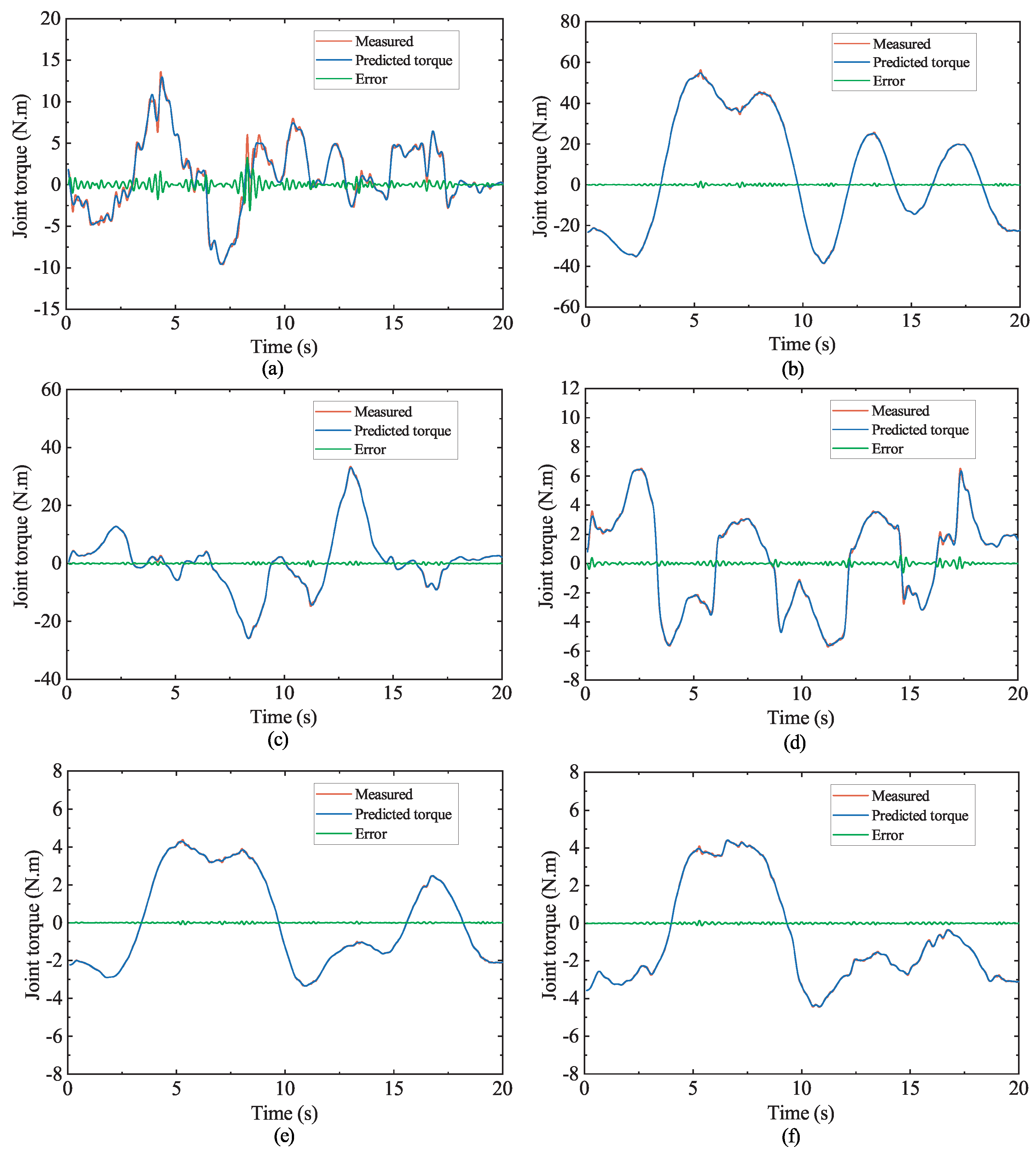
5.2. Model Validation
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PSO | Particle Swarm Optimization |
| WLS | Weighted Least Squares |
| LS | Least Squares |
| RWPSO | Random Weighted Particle Swarm Optimization |
| TPSO | Traditional Particle Swarm Optimization |
| RMS | Root Mean Square |
References
- Ding, H. Basic theory and key technology of fusion robot. Robot Ind. 2016, 6, 12–17. [Google Scholar]
- Bisen, A.; Payal, H. Collaborative robots for industrial tasks: A review. Mater. Today Proc. 2022, 52, 500–504. [Google Scholar] [CrossRef]
- Xu, W.; Cui, J.; Liu, B. Human-robot collaborative disassembly line balancing considering the safe strategy in remanufacturing. J. Clean. Prod. 2021, 324, 129158. [Google Scholar] [CrossRef]
- Olivares-Alarcos, A.; Foix, S.; Borgo, S. OCRA–An ontology for collaborative robotics and adaptation. Comput. Ind. 2022, 138, 103627. [Google Scholar] [CrossRef]
- Leboutet, Q.; Roux, J.; Janot, A. Inertial parameter identification in robotics: A survey. Appl. Sci. 2021, 11, 4303. [Google Scholar] [CrossRef]
- Ren, T.; Dong, Y.; Wu, D. Collision detection and identification for robot manipulators based on extended state observer. Control Eng. Pract. 2018, 79, 144–153. [Google Scholar] [CrossRef]
- Nguyen, V.; Melkote, S. Hybrid statistical modelling of the frequency response function of industrial robots. Robot.-Comput.-Integr. Manuf. 2021, 70, 102134. [Google Scholar] [CrossRef]
- Qin, Z.; Baron, L.; Birglen, L. A new approach to the dynamic parameter identification of robotic manipulators. Robotica 2010, 28, 539–547. [Google Scholar] [CrossRef]
- Tao, J. Research on Human/Position Compliance Control of Industrial Machines Based on Dynamic Parameter Identification; Huazhong University of Science and Technology: Wuhan, China, 2019. [Google Scholar]
- Sun, Y. Research and Implementation of Dynamic Modeling and Feedforward Control Method for Heavy-Duty Robot; Southeast University: Nanjing, China, 2017. [Google Scholar]
- Urrea, C.; Pascal, J. Design, simulation, comparison and evaluation of parameter identification methods for an industrial robot. Comput. Electr. Eng. 2018, 67, 791–806. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, X. Identification method for load dynamics parameters of industrial robots. Robot 2020, 42, 325–335. [Google Scholar] [CrossRef]
- Kircanski, N.; Goldenberg, A. An experimental study of nonlinear stiffness, hysteresis, and friction effects in robot joints with harmonic drives and torque sensors. Int. J. Robot. Res. 1997, 16, 214–239. [Google Scholar] [CrossRef]
- Atkeson, C.; An, C.; Hollerbach, J. Estimation of inertial parameters of manipulator loads and links. Int. J. Robot. Res. 1986, 5, 101–119. [Google Scholar] [CrossRef]
- Liu, Y.; Li, G.; Xia, D. Identification of dynamic parameters of space robot based on improved genetic algorithm. J. Harbin Inst. Technol. 2010, 11, 1734–1739. [Google Scholar]
- Sun, Y.; Zhou, B. Dynamic parameter identification of industrial robot based on genetic algorithm. Ind. Control Comput. 2017, 30, 1–3. [Google Scholar]
- Chen, E.; Liu, Z. Artificial neural network method for identification of inertial parameters of robot end arm. China Mech. Eng. 2006, 17, 268–271. [Google Scholar]
- Wang, Y.; Wang, Y. Dynamic parameter identification of flexible joint robot based on adaptive particle swarm optimization genetic algorithm. J. Metrol. 2019, 41, 60–66. [Google Scholar]
- Zhang, T.; Hu, L.; Zou, Y. Identification of improved friction model for robot based on hybrid genetic algorithm. J. Zhejiang Univ. (Eng. Sci.) 2021, 55, 801–809. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, L.; Han, K. Dynamic parameter identification of robot manipulators based on the optimal excitation trajectory. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 2145–2150. [Google Scholar] [CrossRef]
- Lin, M.; Yang, C.; Li, D. Hybrid strategy based model parameter estimation of irregular-shaped underwater vehicles for predicting velocity. Robot. Auton. Syst. 2020, 127, 103480. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, B. Parameter identification of supercapacitor equivalent circuit model using nonlinear least square method. J. Xi’an Jiaotong Univ. 2020, 54, 10–18. [Google Scholar]
- Cao, H.; Nguyen, H.; Nguyen, T. Robot Calibration Method Based on Extended Kalman Filter–Dual Quantum Behaved Particle Swarm Optimization and Adaptive Neuro-Fuzzy Inference System. IEEE Access 2021, 9, 132568. [Google Scholar] [CrossRef]
- Liu, Y.; Hou, Z.; Wang, H. Parameter identification of collaborative robot based on improved artificial fish swarm algorithm. In Proceedings of the 2020 International Conference on High Performance Big Data and Intelligent Systems, Shenzhen, China, 23 May 2020; Volume 1, p. 7. [Google Scholar] [CrossRef]
- Spong, M.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley and Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Swevers, J.; Verdonck, W.; De Schutter, J. Dynamic model identification for industrial robots. IEEE Control Syst. Mag. 2007, 27, 58–71. [Google Scholar] [CrossRef]
- Ding, L.; Wu, H.; Yao, Y. Dynamic model identification for 6-DOF industrial robots. J. Robot. 2015, 2015, 9. [Google Scholar] [CrossRef]
- Tu, X. Research on key Technology of Industrial Robot Motion Control Based on Dynamic Feedforward; Huazhong University of Science and Technology: Wuhan, China, 2018. [Google Scholar]
- Chen, Q.; Zheng, Y.; Jiang, H. Dynamic model identification for 6-DOF industrial robots. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2021, 49, 51. [Google Scholar] [CrossRef]
- Slotine, J.; Li, W. On the adaptive control of robot manipulators. Int. J. Robot. Res. 1987, 6, 49–59. [Google Scholar] [CrossRef]
- Wu, W.; Zhu, S.; Jin, X. Identification of robot dynamic parameters based on improved fourier series. J. Zhejiang Univ. 2013, 47, 231–323. [Google Scholar] [CrossRef]
- Neubauer, M.; Gattringer, H.; Bremer, H. A persistent method for parameter identification of a seven-axes manipulator. Robotica 2015, 33, 1099–1112. [Google Scholar] [CrossRef]
- Gautier, M.; Poignet, P. Extended Kalman filtering and weighted least squares dynamic identification of robot. Control Eng. Pract. 2001, 9, 1361–1372. [Google Scholar] [CrossRef]
- Wu, W. Joint Friction Analysis and Low Speed High Precision Motion Control of Multi Degree of Freedom Serial Robot; Zhejiang University: Hangzhou, China, 2013. [Google Scholar]
- Khalil, W.; Gautier, M.; Lemoine, P. Identification of the payload inertial parameters of industrial manipulators. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 4943–4948. [Google Scholar] [CrossRef]
- Kubus, D.; Kroger, T.; Wahl, F. On-line estimation of inertial parameters using a recursive total least-squares approach. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3845–3852. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, H. Improved kalman filtering for discrete linear systems with correlated noises. J. Northeast. Univ. 2010, 31. [Google Scholar]
- Ding, L.; Wu, H.; Yao, Y. Chaotic artificial bee colony algorithm for system identification of a small-scale unmanned helicopter. Int. J. Aerosp. Eng. 2015, 2015, 801874. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0.126 | 0 |
| 2 | 0 | 0.216 | ||
| 3 | 0 | −0.257 | 0 | 0 |
| 4 | 0 | −0.215 | 0.103 | |
| 5 | 0 | 0.127 | 0 | |
| 6 | 0 | 0.104 | 0 |
| Identifiers | Identifying Value | Identifiers | Identifying Value | Identifiers | Identifying Value |
|---|---|---|---|---|---|
| 4.4672 | 0.0724 | 0.0057 | |||
| −1.4213 | −0.7103 | 18.3420 | |||
| −0.0502 | −0.1641 | 8.5743 | |||
| −0.3501 | −0.1513 | 15.7401 | |||
| 0.6224 | 0.0932 | 9.2475 | |||
| 3.1617 | 0.7253 | 20.7765 | |||
| 4.4642 | 1.9305 | 9.5148 |
| Link i | LS-PSO | WLS-PSO | WLS-RWPSO |
|---|---|---|---|
| 1 | 0.3816 | 0.3661 | 0.3502 |
| 2 | 0.2478 | 0.2325 | 0.2080 |
| 3 | 0.4012 | 0.3986 | 0.3524 |
| 4 | 0.2186 | 0.2035 | 0.1671 |
| 5 | 0.1937 | 0.1867 | 0.1610 |
| 6 | 0.3506 | 0.3462 | 0.3148 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, M.; Yan, Y.; An, B.; Wang, W.; Zhang, Y. Dynamic Parameter Identification of Collaborative Robot Based on WLS-RWPSO Algorithm. Machines 2023, 11, 316. https://doi.org/10.3390/machines11020316
Tang M, Yan Y, An B, Wang W, Zhang Y. Dynamic Parameter Identification of Collaborative Robot Based on WLS-RWPSO Algorithm. Machines. 2023; 11(2):316. https://doi.org/10.3390/machines11020316
Chicago/Turabian StyleTang, Minan, Yaguang Yan, Bo An, Wenjuan Wang, and Yaqi Zhang. 2023. "Dynamic Parameter Identification of Collaborative Robot Based on WLS-RWPSO Algorithm" Machines 11, no. 2: 316. https://doi.org/10.3390/machines11020316
APA StyleTang, M., Yan, Y., An, B., Wang, W., & Zhang, Y. (2023). Dynamic Parameter Identification of Collaborative Robot Based on WLS-RWPSO Algorithm. Machines, 11(2), 316. https://doi.org/10.3390/machines11020316