Collaborative Artificial Systems
A project collection of Electronics (ISSN 2079-9292). This project collection belongs to the section "Computer Science & Engineering".
Papers displayed on this page all arise from the same project. Editorial decisions were made independently of project staff and handled by the Editor-in-Chief or qualified Editorial Board members.
Viewed by 78168
Share This Project Collection
Editors
 Prof. Dr. Jesús Ángel Román Gallego
Prof. Dr. Jesús Ángel Román Gallego
Prof. Dr. Jesús Ángel Román Gallego
E-Mail
Website
Collection Editor
Escuela Politécnica Superior de Zamora, University of Salamanca, Av. Requejo 33, C.P. 49022 Zamora, Spain
Interests: swarm systems; artificial intelligence; computer engineering; service-oriented architectures; expert systems
Special Issues, Collections and Topics in MDPI journals
 Dr. María-Luisa Pérez-Delgado
Dr. María-Luisa Pérez-Delgado
Dr. María-Luisa Pérez-Delgado
E-Mail
Website
Collection Editor
Department of Science and Automation, Universidad de Salamanca, Av. Requejo 33, C.P., 49022 Zamora, Spain
Interests: swarm systems; artificial intelligence; computer engineering; service-oriented architectures; expert systems
Special Issues, Collections and Topics in MDPI journals
 Prof. Dr. María Concepción Vega Hernández
Prof. Dr. María Concepción Vega Hernández
Prof. Dr. María Concepción Vega Hernández
E-Mail
Collection Editor
Department of Statistics, Universidad de Salamanca, Av. Requejo 33, C.P., 49022 Zamora, Spain
Interests: swarm systems; emotional intelligence; multivariate statistics
 Prof. Dr. Alfonso Jose Lopez Rivero
Prof. Dr. Alfonso Jose Lopez Rivero
Prof. Dr. Alfonso Jose Lopez Rivero
E-Mail
Collection Editor
Computer Science, Universidad Pontificia de Salamanca, C. de la Compañía, 5, 37002 Salamanca, Spain
Interests: statistics; automated decision making; disruptive technologies; virtual reality
Special Issues, Collections and Topics in MDPI journals
Dr. Daniel Hernández De la Iglesia
Dr. Daniel Hernández De la Iglesia
E-Mail
Website
Collection Editor
Department of Computer Science and Automation, Pontifical University of Salamanca, 37008 Salamanca, Spain
Interests: swarm systems; robotics; artificial intelligence
Project Overview
Dear Colleagues,
Collaboration between artificial systems is an up-and-coming line of research in which different types of systems work together to obtain a benefit in terms of performance and results.
There is a wide range of applications in which these systems can be used: swarm intelligence, collaborative work, optimization, routing problem solving, education, data analysis, blockchain, robotics, etc. Therefore, the projection of this type of systems has great potential and applicability in a multitude of current and future lines of work.
The main objective of this Project Collection is to attract high-quality papers detailing recent research, as well as review articles on recent developments in collaborative artificial systems. Relevant topics for this Project Collection may include (but are not limited to):
- Distributed intelligent systems;
- Swarm systems;
- Collaborative organizational systems;
- IoT;
- Education-oriented artificial systems;
- Big data;
- Decision-making systems;
- Blockchain;
- Robotics.
Dr. Jesús Ángel Román Gallego
Dr. María-Luisa Pérez-Delgado
Prof. Dr. María Concepción Vega Hernández
Prof. Dr. Alfonso Jose Lopez Rivero
Dr. Daniel Hernández De la Iglesia
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 250 words) can be sent to the Editorial Office for assessment.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-anonymized peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Electronics is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2400 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- swarm systems
- blockchain
- robotics
- collaborative systems
- distributed intelligent systems
Published Papers (11 papers)
Open AccessArticle
Concatenation Augmentation for Improving Deep Learning Models in Finance NLP with Scarce Data
by
César Vaca, Jesús-Ángel Román-Gallego, Verónica Barroso-García, Fernando Tejerina and Benjamín Sahelices
Viewed by 1630
Abstract
Nowadays, financial institutions increasingly leverage artificial intelligence to enhance decision-making and optimize investment strategies. A specific application is the automatic analysis of large volumes of unstructured textual data to extract relevant information through deep learning (DL) methods. However, the effectiveness of these methods
[...] Read more.
Nowadays, financial institutions increasingly leverage artificial intelligence to enhance decision-making and optimize investment strategies. A specific application is the automatic analysis of large volumes of unstructured textual data to extract relevant information through deep learning (DL) methods. However, the effectiveness of these methods is often limited by the scarcity of high-quality labeled data. To address this, we propose a new data augmentation technique, Concatenation Augmentation (CA). This is designed to overcome the challenges of processing unstructured text, particularly in analyzing professional profiles from corporate governance reports. Based on Mixup and Label Smoothing Regularization principles, CA generates new text samples by concatenating inputs and applying a convex additive operator, preserving its spatial and semantic coherence. Our proposal achieved hit rates between 92.4% and 99.7%, significantly outperforming other data augmentation techniques. CA improved the precision and robustness of the DL models used for extracting critical information from corporate reports. This technique offers easy integration into existing models and incurs low computational costs. Its efficiency facilitates rapid model adaptation to new data and enhances overall precision. Hence, CA would be a potential and valuable data augmentation tool for boosting DL model performance and efficiency in analyzing financial and governance textual data.
Full article
►▼
Show Figures
Open AccessReview
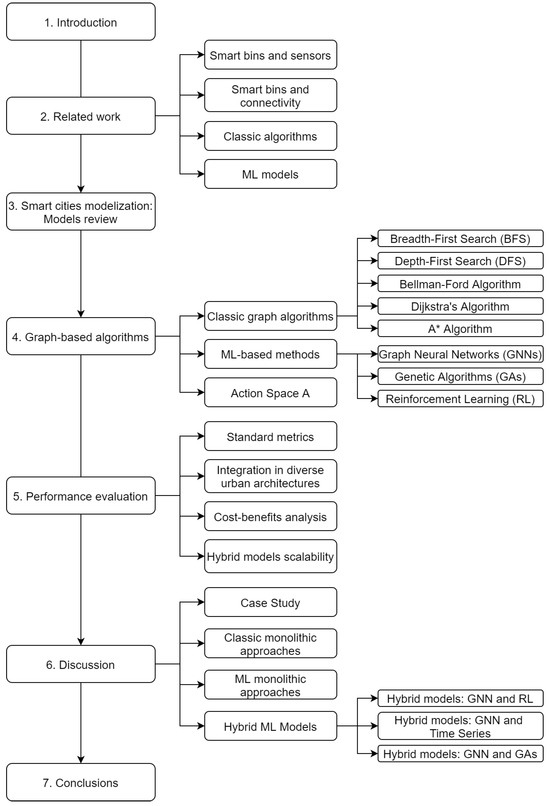
Toward Greener Smart Cities: A Critical Review of Classic and Machine-Learning-Based Algorithms for Smart Bin Collection
by
Alice Gatti, Enrico Barbierato and Andrea Pozzi
Cited by 14 | Viewed by 5420
Abstract
This study critically reviews the scientific literature regarding machine-learning approaches for optimizing smart bin collection in urban environments. Usually, the problem is modeled within a dynamic graph framework, where each smart bin’s changing waste level is represented as a node. Algorithms incorporating Reinforcement
[...] Read more.
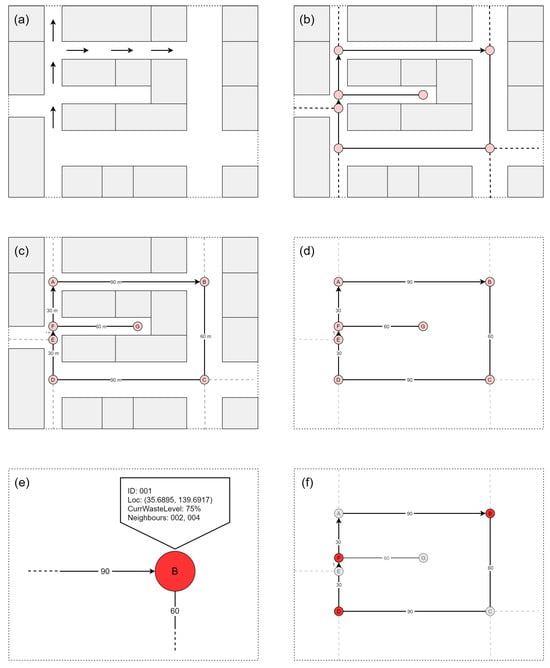
This study critically reviews the scientific literature regarding machine-learning approaches for optimizing smart bin collection in urban environments. Usually, the problem is modeled within a dynamic graph framework, where each smart bin’s changing waste level is represented as a node. Algorithms incorporating Reinforcement Learning (RL), time-series forecasting, and Genetic Algorithms (GA) alongside Graph Neural Networks (GNNs) are analyzed to enhance collection efficiency. While individual methodologies present limitations in computational demand and adaptability, their synergistic application offers a holistic solution. From a theoretical point of view, we expect that the GNN-RL model dynamically adapts to real-time data, the GNN-time series predicts future bin statuses, and the GNN-GA hybrid optimizes network configurations for accurate predictions, collectively enhancing waste management efficiency in smart cities.
Full article
►▼
Show Figures
Open AccessFeature PaperArticle
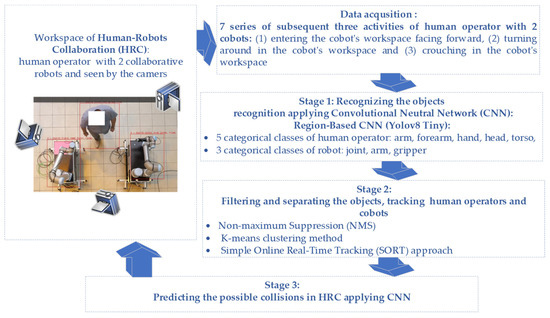
Working toward Solving Safety Issues in Human–Robot Collaboration: A Case Study for Recognising Collisions Using Machine Learning Algorithms
by
Justyna Patalas-Maliszewska, Adam Dudek, Grzegorz Pajak and Iwona Pajak
Cited by 17 | Viewed by 4870
Abstract
The monitoring and early avoidance of collisions in a workspace shared by collaborative robots (cobots) and human operators is crucial for assessing the quality of operations and tasks completed within manufacturing. A gap in the research has been observed regarding effective methods to
[...] Read more.
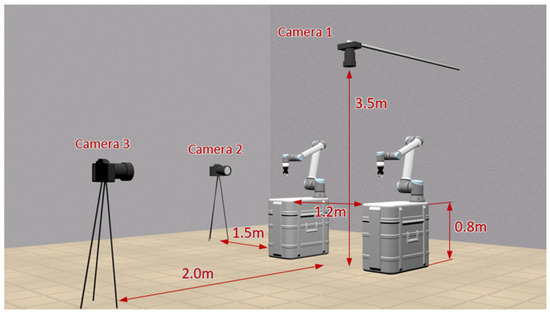
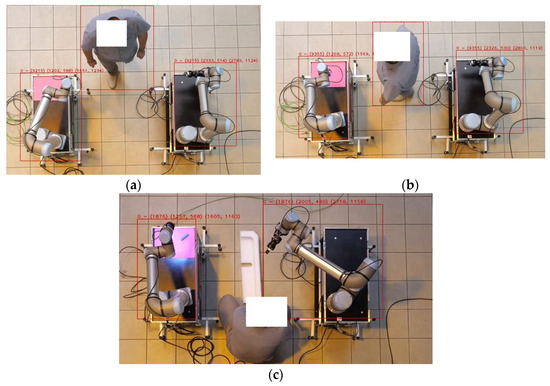
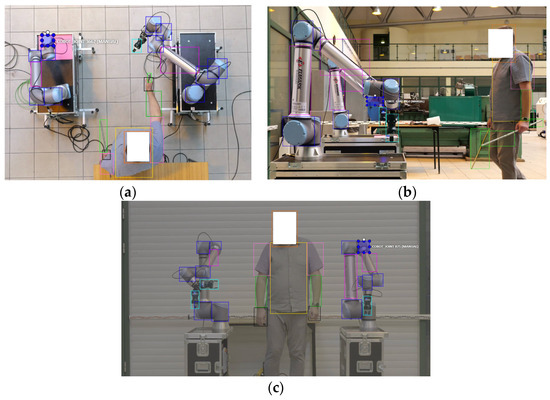
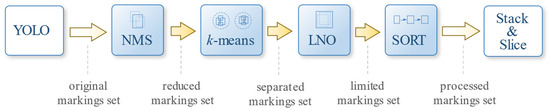
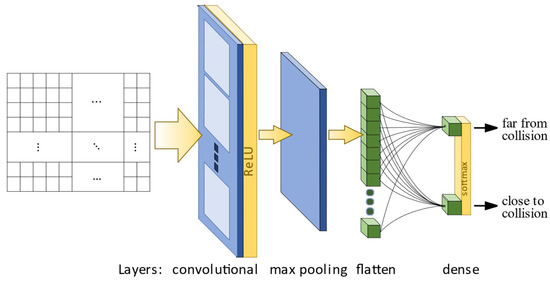
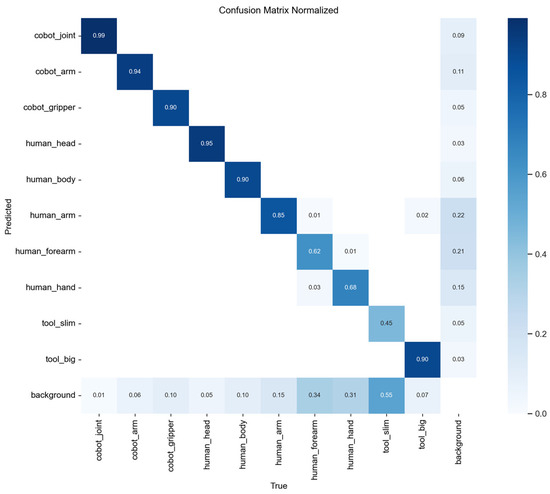
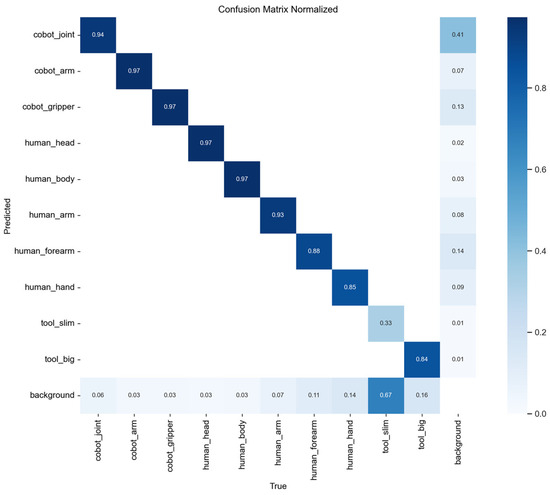
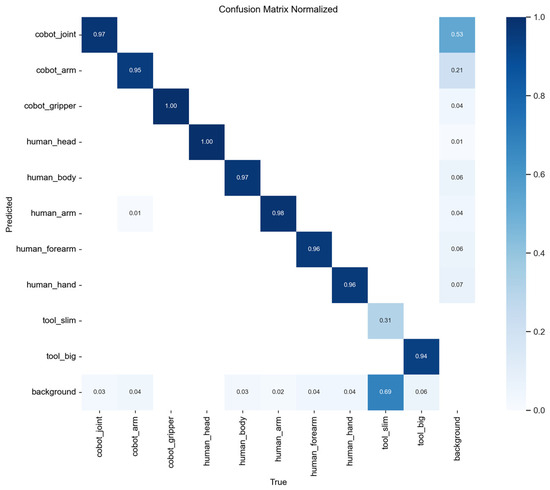
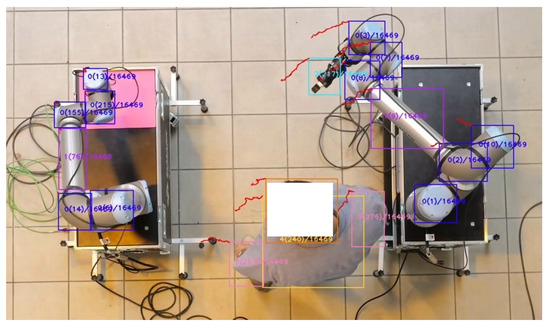
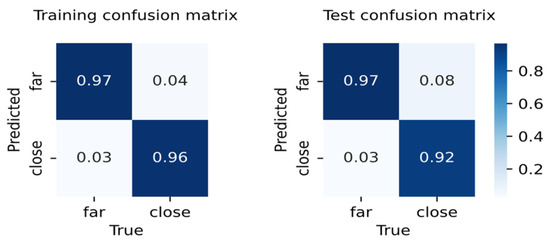
The monitoring and early avoidance of collisions in a workspace shared by collaborative robots (cobots) and human operators is crucial for assessing the quality of operations and tasks completed within manufacturing. A gap in the research has been observed regarding effective methods to automatically assess the safety of such collaboration, so that employees can work alongside robots, with trust. The main goal of the study is to build a new method for recognising collisions in workspaces shared by the cobot and human operator. For the purposes of the research, a research unit was built with two UR10e cobots and seven series of subsequent of the operator activities, specifically: (1) entering the cobot’s workspace facing forward, (2) turning around in the cobot’s workspace and (3) crouching in the cobot’s workspace, taken as video recordings from three cameras, totalling 484 images, were analysed. This innovative method involves, firstly, isolating the objects using a Convolutional Neutral Network (CNN), namely the Region-Based CNN (YOLOv8 Tiny) for recognising the objects (stage 1). Next, the Non-Maximum Suppression (NMS) algorithm was used for filtering the objects isolated in previous stage, the
k-means clustering method and Simple Online Real-Time Tracking (SORT) approach were used for separating and tracking cobots and human operators (stage 2) and the Convolutional Neutral Network (CNN) was used to predict possible collisions (stage 3). The method developed yields 90% accuracy in recognising the object and 96.4% accuracy in predicting collisions accuracy, respectively. The results achieved indicate that understanding human behaviour working with cobots is the new challenge for modern production in the Industry 4.0 and 5.0 concept.
Full article
►▼
Show Figures
Open AccessArticle
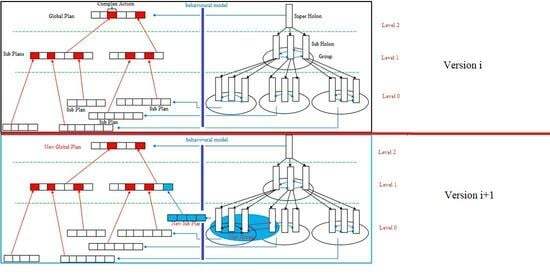
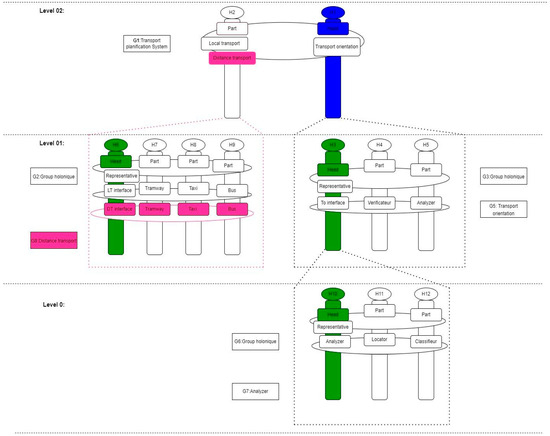
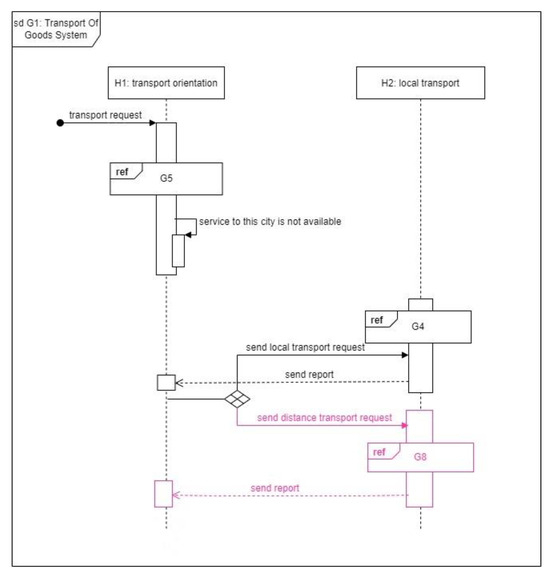
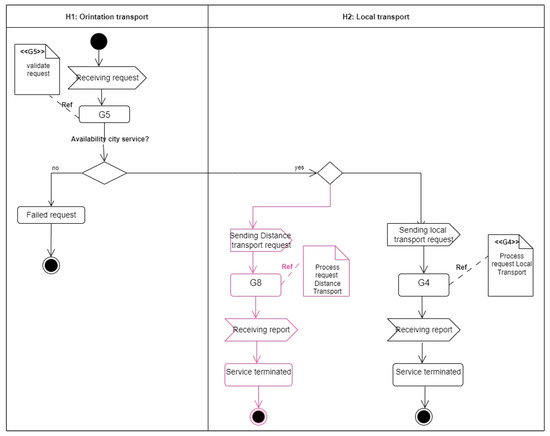
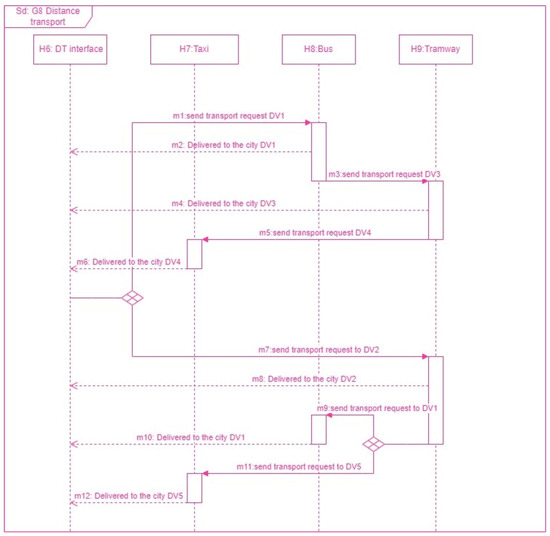
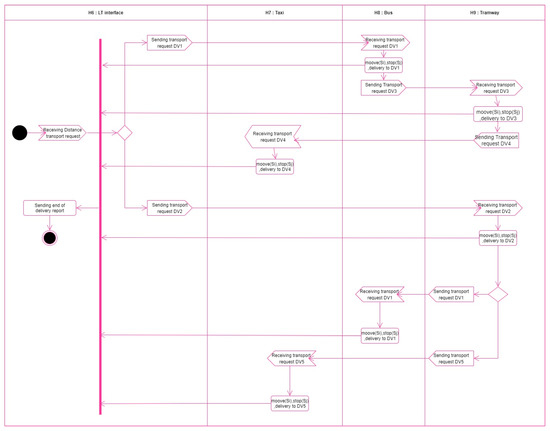
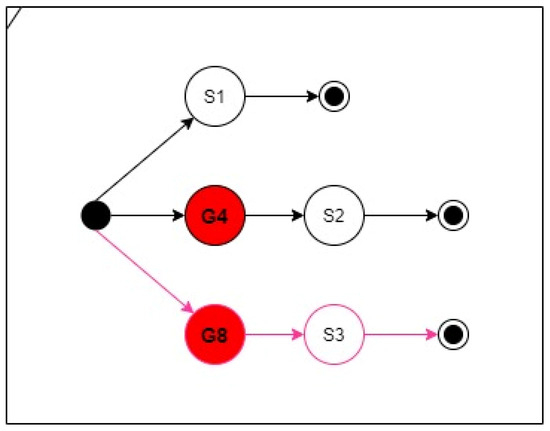
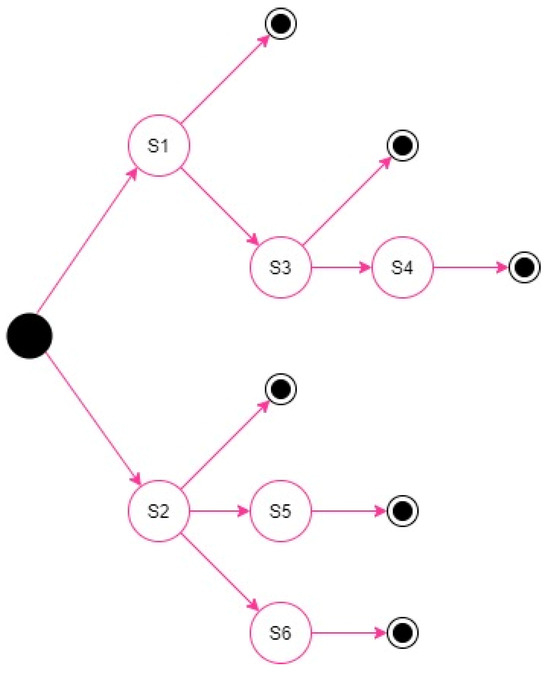
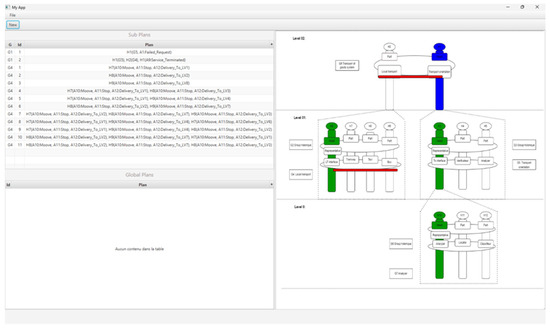
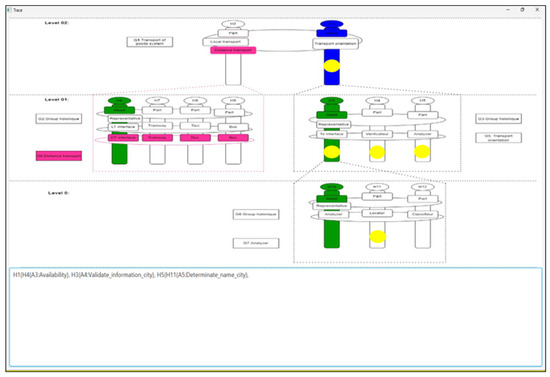
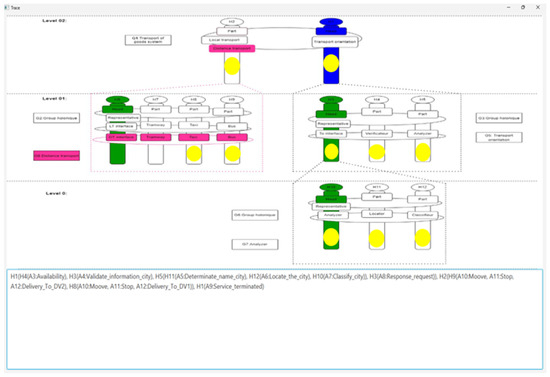
Distributed, Dynamic and Recursive Planning for Holonic Multi-Agent Systems: A Behavioural Model-Based Approach
by
Nour El Houda Dehimi, Stéphane Galland, Zakaria Tolba, Nora Allaoua and Mouhamed Ferkani
Cited by 5 | Viewed by 2833
Abstract
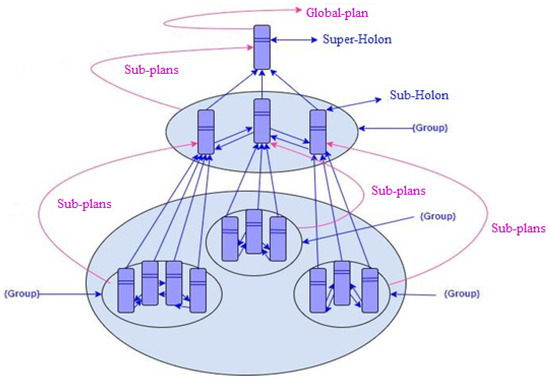
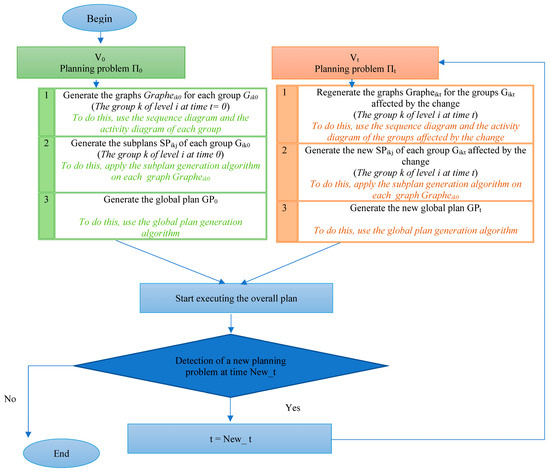
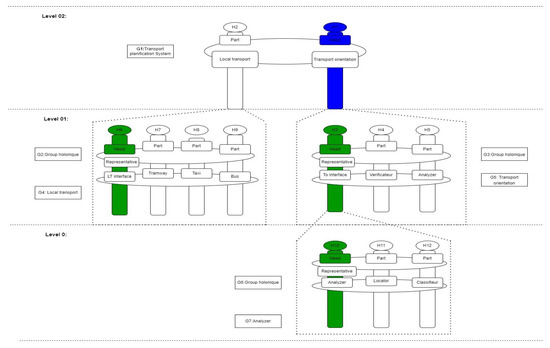
In this work, we propose a new distributed, dynamic, and recursive planning approach able to consider the hierarchical nature of the holonic agent and the unpredictable evolution of its behaviour. For each new version of the holonic agent, introduced because of the agent
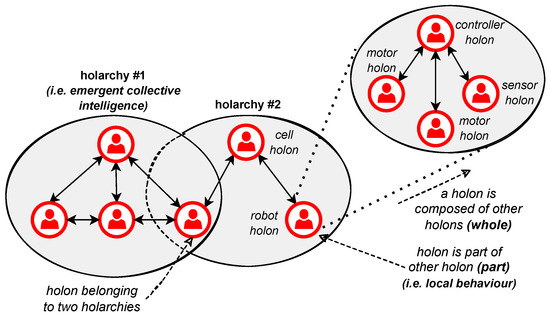
[...] Read more.
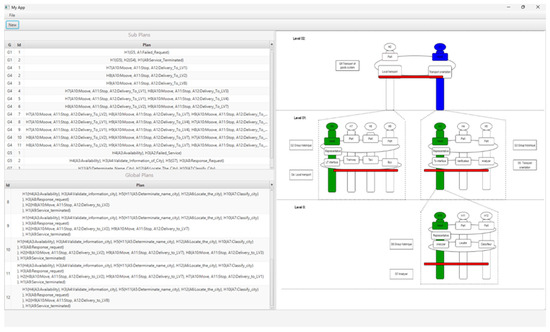
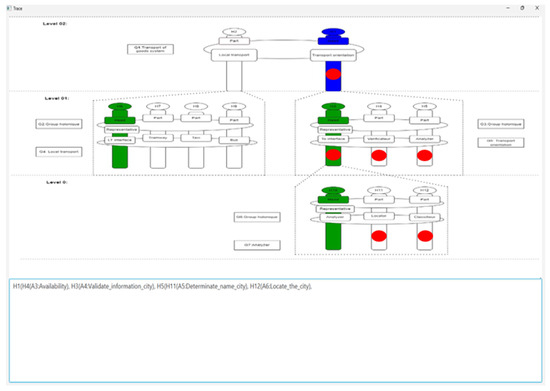
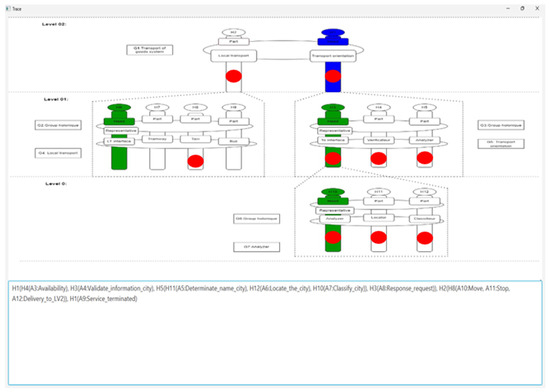
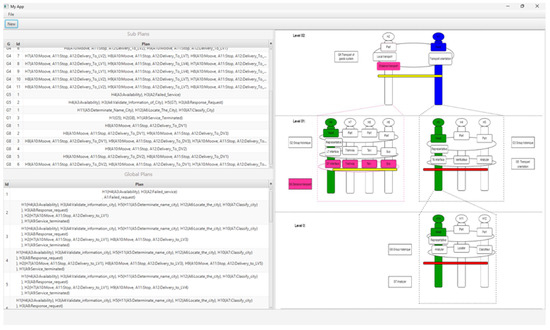
In this work, we propose a new distributed, dynamic, and recursive planning approach able to consider the hierarchical nature of the holonic agent and the unpredictable evolution of its behaviour. For each new version of the holonic agent, introduced because of the agent members obtaining new roles to achieve new goals and adapt to the changing environment, the approach generates a new plan that can solve the new planning problem associated with this new version against which the plans, executed by the holonic agent, become obsolete. To do this, the approach starts by generating sub-plans capable of solving the planning subproblems associated with the groups of the holonic agent at its different levels. It then recursively links the sub-plans, according to their hierarchical and behavioural dependency, to obtain a global plan. To generate the sub-plans, the approach exploits the behavioural model of the holonic agent’s groups, thereby minimising the computation rate imposed by other multi-agent planning methods. In our work, we have used a concrete case to show and illustrate the usefulness of our approach.
Full article
►▼
Show Figures
Open AccessArticle
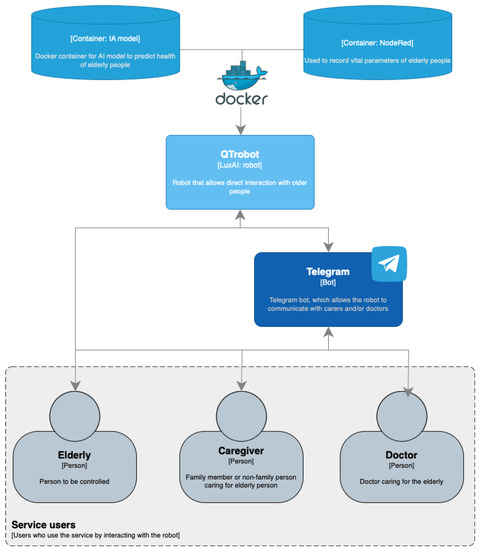
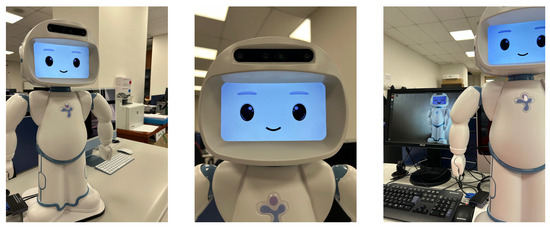
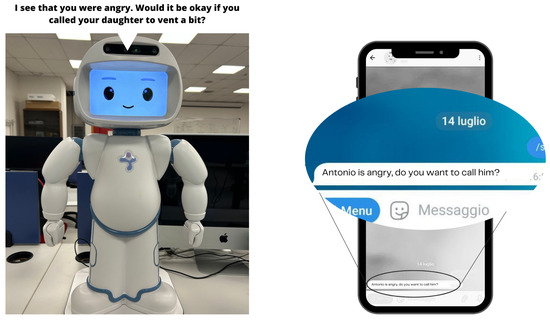
Enhancing Elderly Health Monitoring: Achieving Autonomous and Secure Living through the Integration of Artificial Intelligence, Autonomous Robots, and Sensors
by
Andrea Antonio Cantone, Mariarosaria Esposito, Francesca Pia Perillo, Marco Romano, Monica Sebillo and Giuliana Vitiello
Cited by 48 | Viewed by 14672
Abstract
The use of robots in elderly care represents a dynamic field of study aimed at meeting the growing demand for home-based health care services. This article examines the application of robots in elderly home care and contributes to the literature by introducing a
[...] Read more.
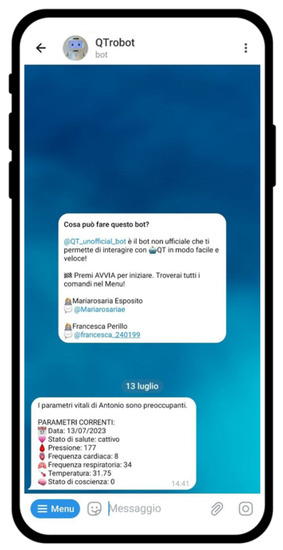
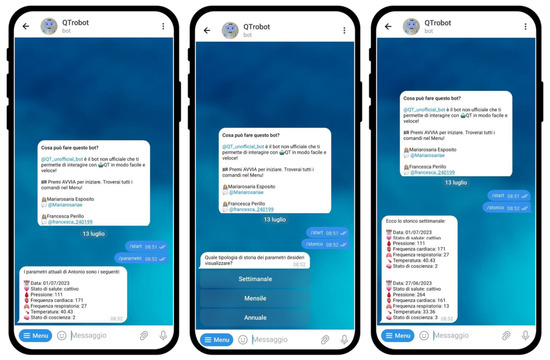
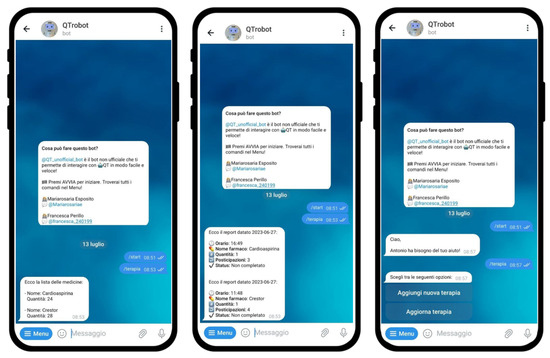
The use of robots in elderly care represents a dynamic field of study aimed at meeting the growing demand for home-based health care services. This article examines the application of robots in elderly home care and contributes to the literature by introducing a comprehensive and functional architecture within the realm of theInternet of Robotic Things (IoRT). This architecture amalgamates robots, sensors, and Artificial Intelligence (AI) to monitor the health status of the elderly. This study presented a four-actor system comprising a stationary humanoid robot, elderly individuals, medical personnel, and caregivers. This system enables continuous monitoring of the physical and emotional well-being of the elderly through specific sensors that measure vital signs, with real-time updates relayed to physicians and assistants, thereby ensuring timely and appropriate care. Our research endeavors to develop a fully integrated architecture that seamlessly integrates robots, sensors, and AI, enabling comprehensive care for elderly individuals in the comfort of their homes, thus reducing their reliance on institutional hospitalization. In particular, the methodology used was based on a user-centered approach involving geriatricians from the outset. This has been of fundamental importance in assessing their receptivity to the adoption of an intelligent information system, and above all, in understanding the issues most relevant to the elderly. The humanoid robot is specifically designed for close interaction with the elderly, capturing vital signs, emotional states, and cognitive conditions while providing assistance in daily routines and alerting family members and physicians to anomalies. Furthermore, communication was facilitated through an external Telegram bot. To predict the health status of the elderly, a machine learning model based on the Modified Early Warning Score (MEWS), a medical scoring scale, was developed. Five key lessons emerged from the study, showing how the system presented can provide valuable support to physicians, caregivers, and older people.
Full article
►▼
Show Figures
Open AccessArticle
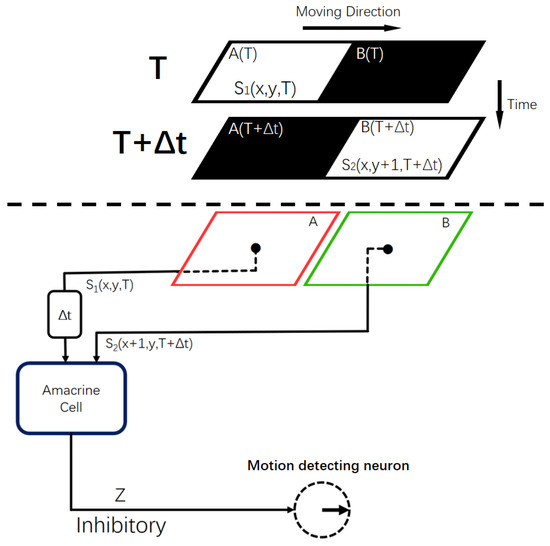
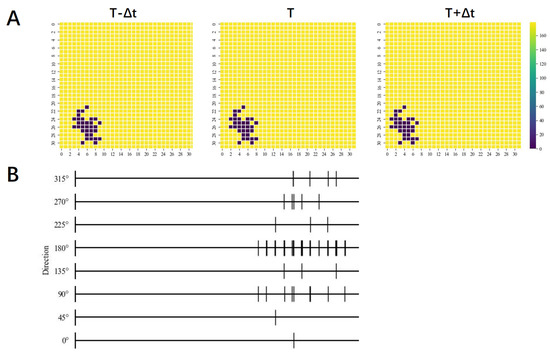
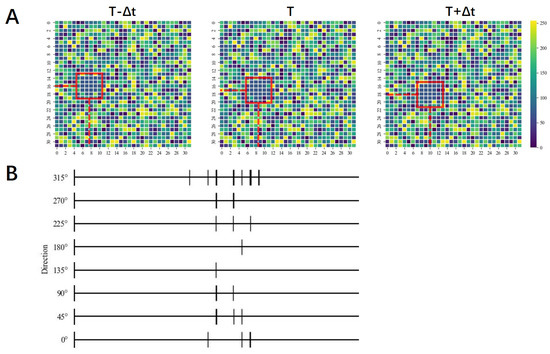
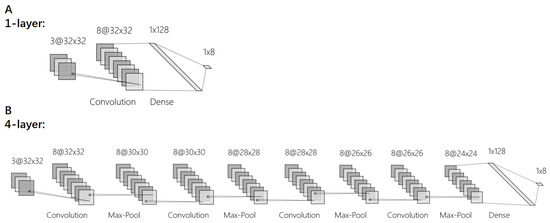
A Motion-Direction-Detecting Model for Gray-Scale Images Based on the Hassenstein–Reichardt Model
by
Zhiyu Qiu, Yuki Todo, Chenyang Yan and Zheng Tang
Cited by 1 | Viewed by 2385
Abstract
The visual system of sighted animals plays a critical role in providing information about the environment, including motion details necessary for survival. Over the past few years, numerous studies have explored the mechanism of motion direction detection in the visual system for binary
[...] Read more.
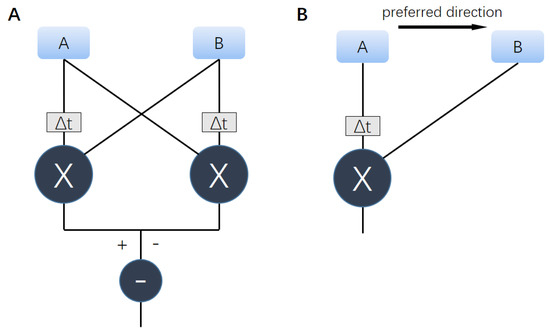
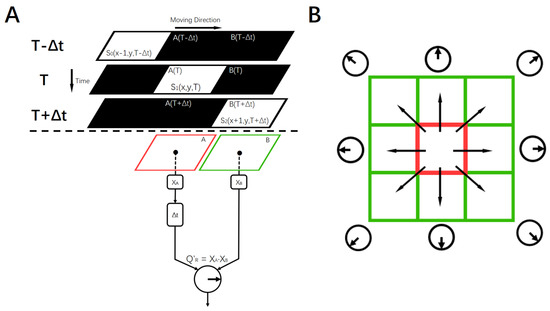
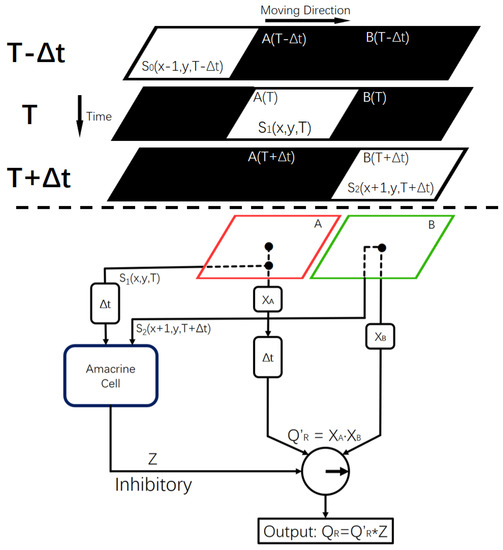
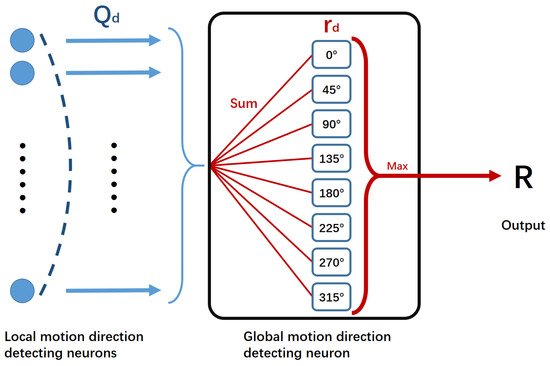
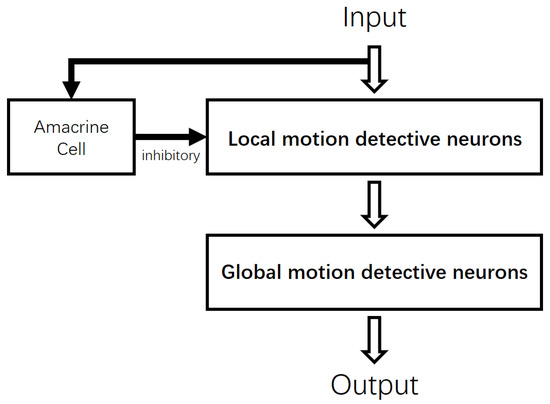
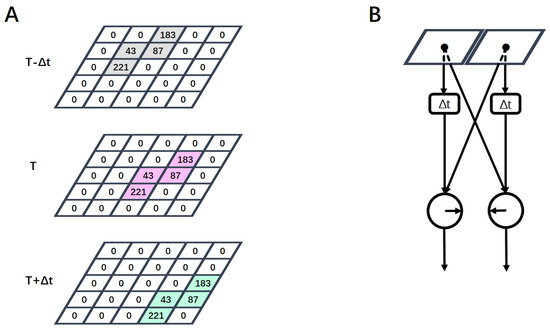
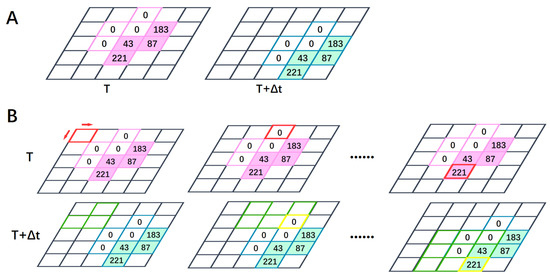
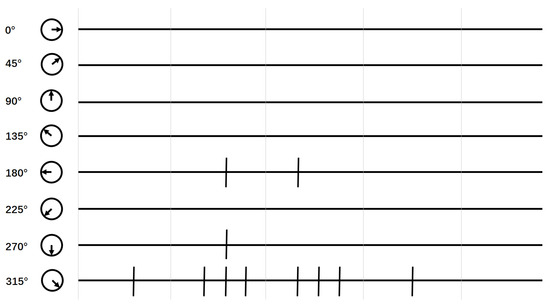
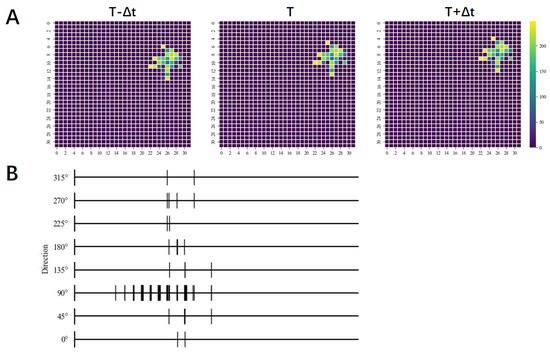
The visual system of sighted animals plays a critical role in providing information about the environment, including motion details necessary for survival. Over the past few years, numerous studies have explored the mechanism of motion direction detection in the visual system for binary images, including the Hassenstein–Reichardt model (HRC model) and the HRC-based artificial visual system (AVS). In this paper, we introduced a contrast-response system based on previous research on amacrine cells in the visual system of
Drosophila and other species. We combined this system with the HRC-based AVS to construct a motion-direction-detection system for gray-scale images. Our experiments verified the effectiveness of our model in detecting the motion direction in gray-scale images, achieving at least 99% accuracy in all experiments and a remarkable 100% accuracy in several circumstances. Furthermore, we developed two convolutional neural networks (CNNs) for comparison to demonstrate the practicality of our model.
Full article
►▼
Show Figures
Open AccessFeature PaperReview
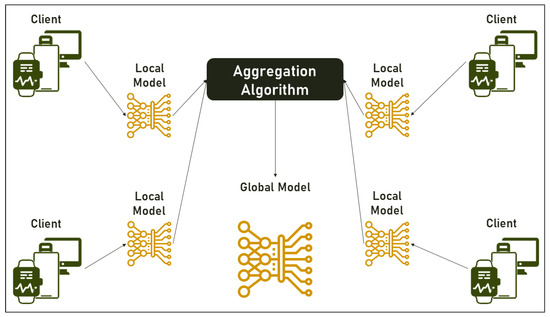
Reviewing Federated Learning Aggregation Algorithms; Strategies, Contributions, Limitations and Future Perspectives
by
Mohammad Moshawrab, Mehdi Adda, Abdenour Bouzouane, Hussein Ibrahim and Ali Raad
Cited by 135 | Viewed by 28124
Abstract
The success of machine learning (ML) techniques in the formerly difficult areas of data analysis and pattern extraction has led to their widespread incorporation into various aspects of human life. This success is due in part to the increasing computational power of computers
[...] Read more.
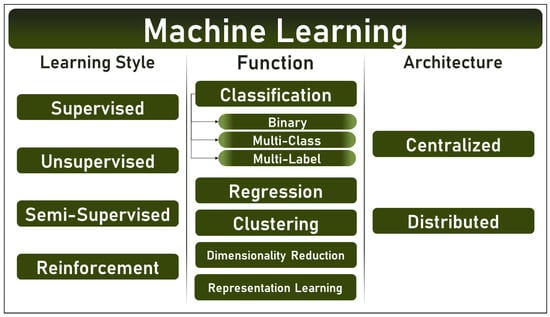
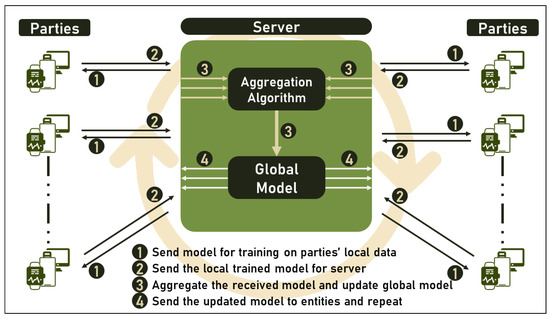
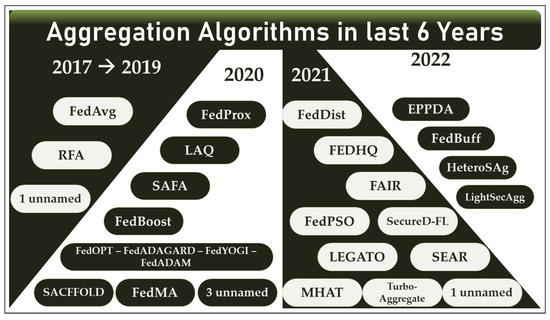
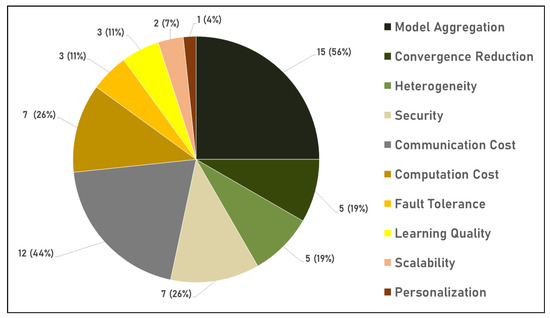
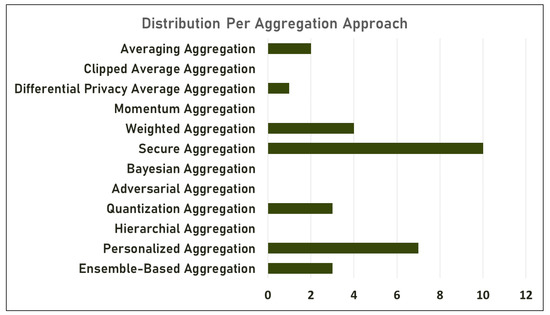
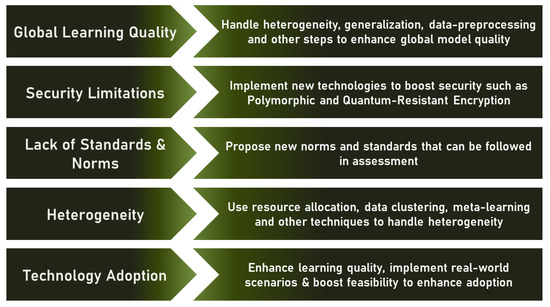
The success of machine learning (ML) techniques in the formerly difficult areas of data analysis and pattern extraction has led to their widespread incorporation into various aspects of human life. This success is due in part to the increasing computational power of computers and in part to the improved ability of ML algorithms to process large amounts of data in various forms. Despite these improvements, certain issues, such as privacy, continue to hinder the development of this field. In this context, a privacy-preserving, distributed, and collaborative machine learning technique called federated learning (FL) has emerged. The core idea of this technique is that, unlike traditional machine learning, user data is not collected on a central server. Nevertheless, models are sent to clients to be trained locally, and then only the models themselves, without associated data, are sent back to the server to combine the different locally trained models into a single global model. In this respect, the aggregation algorithms play a crucial role in the federated learning process, as they are responsible for integrating the knowledge of the participating clients, by integrating the locally trained models to train a global one. To this end, this paper explores and investigates several federated learning aggregation strategies and algorithms. At the beginning, a brief summary of federated learning is given so that the context of an aggregation algorithm within a FL system can be understood. This is followed by an explanation of aggregation strategies and a discussion of current aggregation algorithms implementations, highlighting the unique value that each brings to the knowledge. Finally, limitations and possible future directions are described to help future researchers determine the best place to begin their own investigations.
Full article
►▼
Show Figures
Open AccessArticle
A Multiformalism-Based Model for Performance Evaluation of Green Data Centres
by
Enrico Barbierato, Daniele Manini and Marco Gribaudo
Cited by 2 | Viewed by 2301
Abstract
Although the coexistence of ARM and INTEL technologies in green data centres is technically feasible, significant challenges exist that must be addressed. These challenges stem from the differences in instruction sets and power consumption between the two processor architectures. While ARM processors are
[...] Read more.
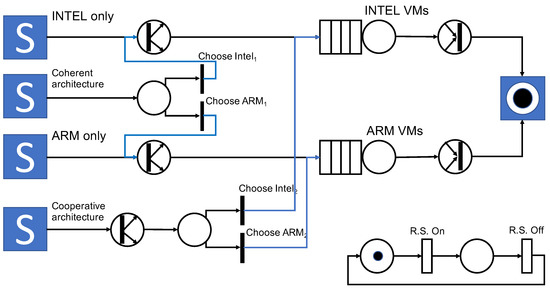
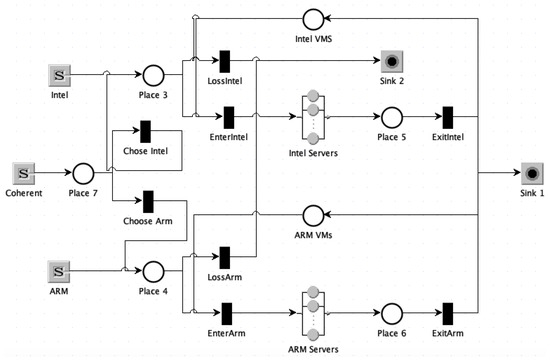
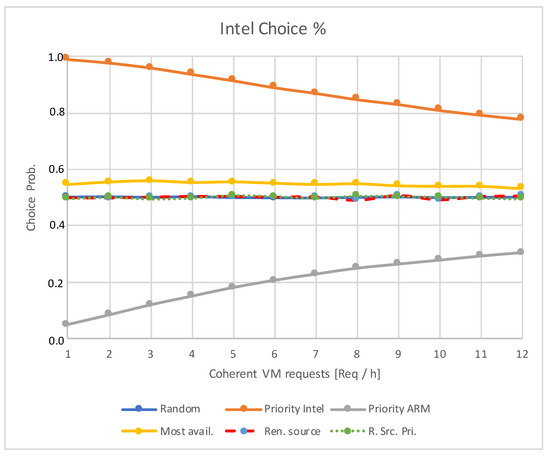
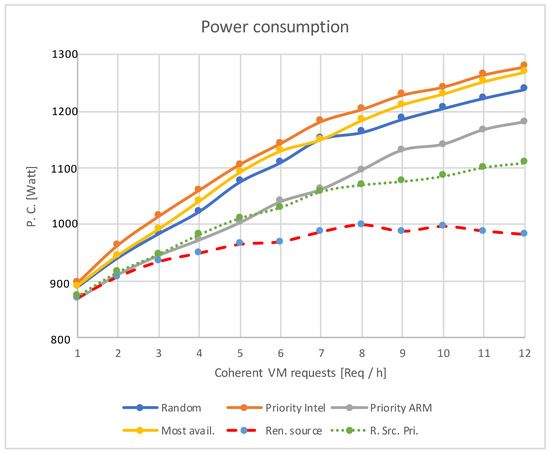
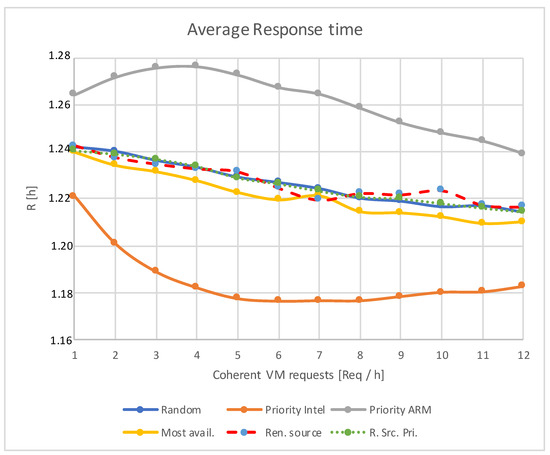
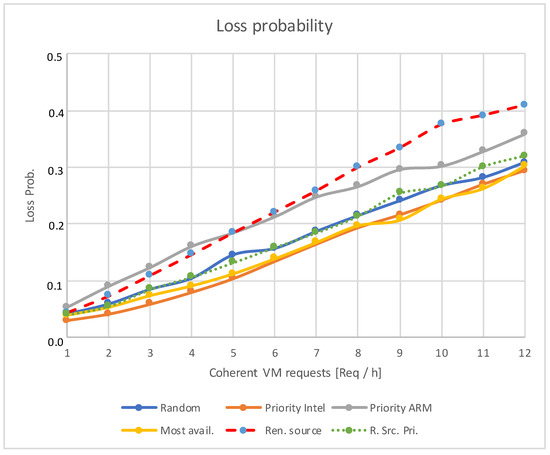
Although the coexistence of ARM and INTEL technologies in green data centres is technically feasible, significant challenges exist that must be addressed. These challenges stem from the differences in instruction sets and power consumption between the two processor architectures. While ARM processors are known for their energy efficiency, INTEL processors tend to consume more power. Consequently, evaluating the performance of hybrid architectures can be a complex task. The contributions of this article consist of (i) a multiformalism-based model of a data centre, providing a natural and convenient approach to the specification process and performance analysis of a realistic scenario and (ii) a review of the performance indices, including the choice of one architecture over another, power consumption, the response time, and request loss, according to different policies. As a result, the model aims to address issues such as system underutilization and the need to estimate the optimal workload balance, thereby providing an effective solution for evaluating the performance of hybrid hardware architectures.
Full article
►▼
Show Figures
Open AccessArticle
EDaLI: A Public Domain Dataset for Emotional Analysis Using Brain Computer Interfaces during an Interaction with a Second-Language Learning Platform
by
Andrés Ovidio Restrepo-Rodríguez, Maddyzeth Ariza-Riaño, Paulo Alonso Gaona-García and Carlos Enrique Montenegro-Marín
Cited by 1 | Viewed by 3022
Abstract
In recent years, it has been shown that emotions influence what we learn and retain, and second-language learning is no exception to this phenomenon. Currently, a variety of mobile learning applications offer content for language learners, and a wide range of languages are
[...] Read more.
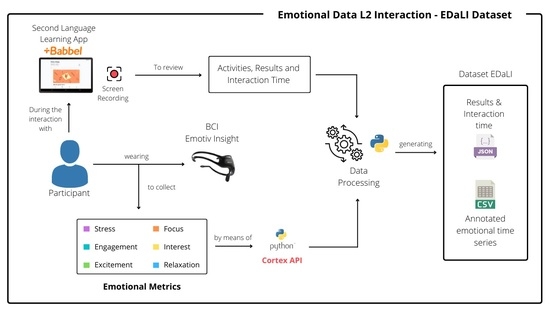
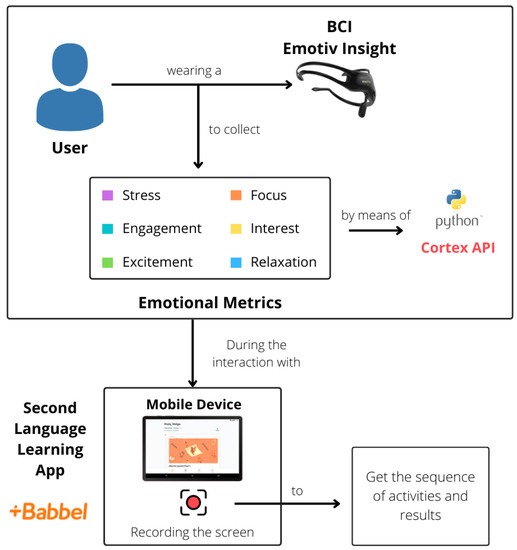
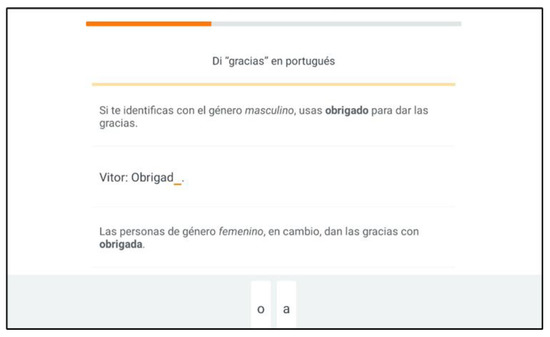
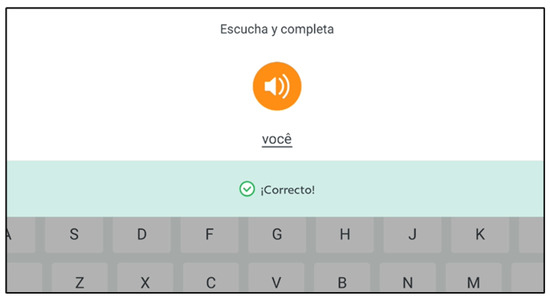
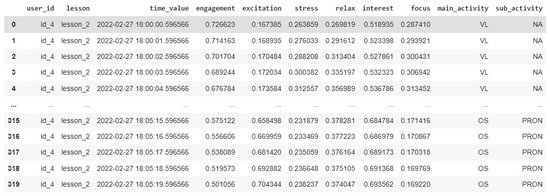
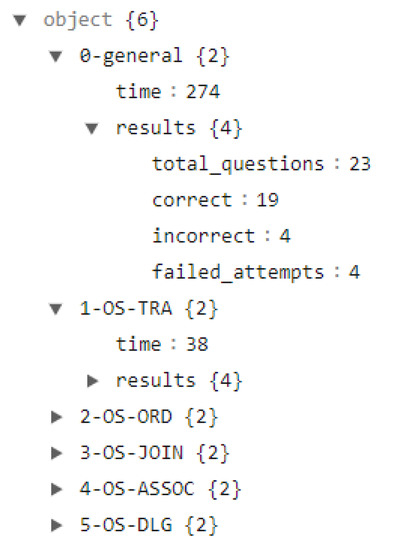
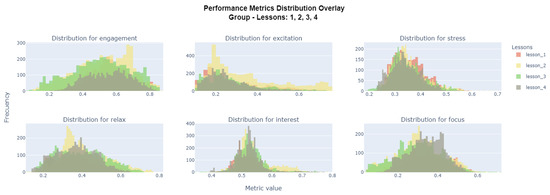
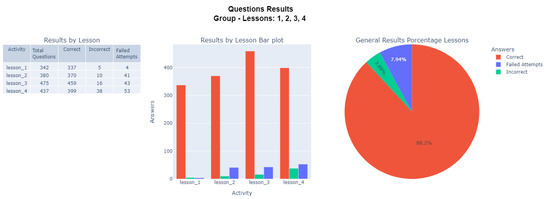
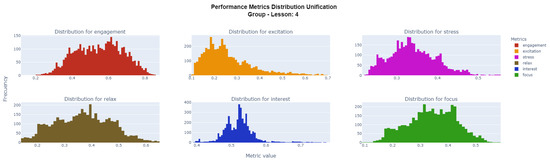
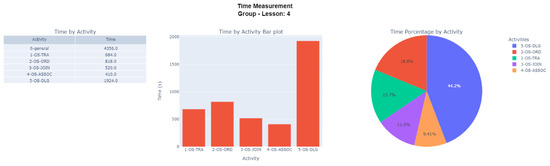
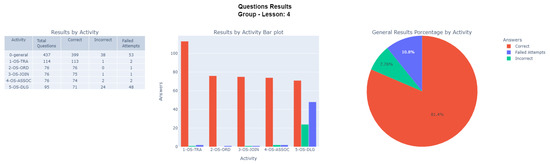
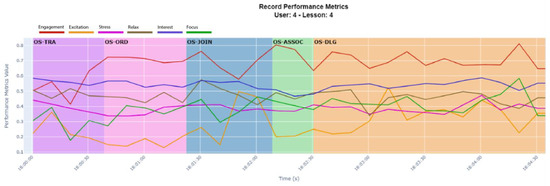
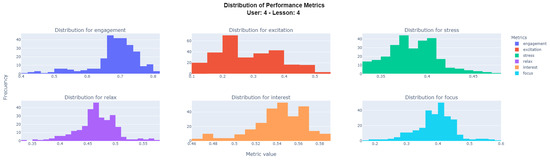
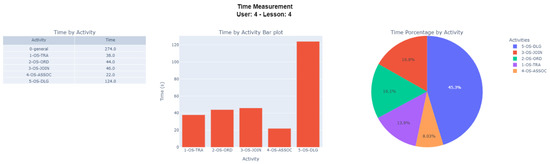
In recent years, it has been shown that emotions influence what we learn and retain, and second-language learning is no exception to this phenomenon. Currently, a variety of mobile learning applications offer content for language learners, and a wide range of languages are presented. The analysis of emotional data in learning environments has been implemented through various methods, such as the collection of vital signs. This is where brain–computer interfaces (BCIs) play an important role in capturing emotional metrics from brain activity. Accordingly, this paper presents the Emotional Data L2 Interaction (EDaLI) dataset for emotional analysis based on the collection of emotions, such as engagement, stress, excitement, interest, relaxation, and focus, through Emotiv Insight, during the interaction of 19 participants with 4 initial lessons in Portuguese as a second-language, through the Babbel application. A preliminary visualization approach is proposed from the generated dataset. In accordance with this, it is concluded that visualization techniques can clearly be applied to EDaLI to show the emotional behavior exhibited by the participants during their interactions. Additionally, the spectrum of algorithms to be applied is open and includes possibilities such as the use of clustering techniques for time series of variable lengths.
Full article
►▼
Show Figures
Open AccessArticle
A Virtual Reality Whiteboard System for Remote Collaboration Using Natural Handwriting
by
Jiangkun Wang and Lei Jing
Cited by 9 | Viewed by 6075
Abstract
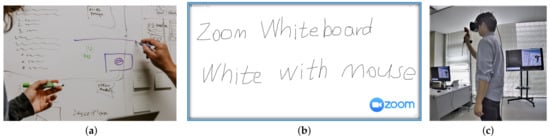
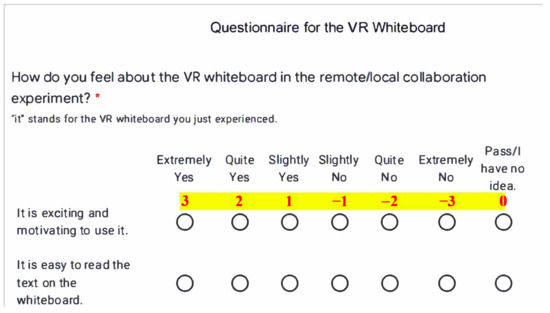
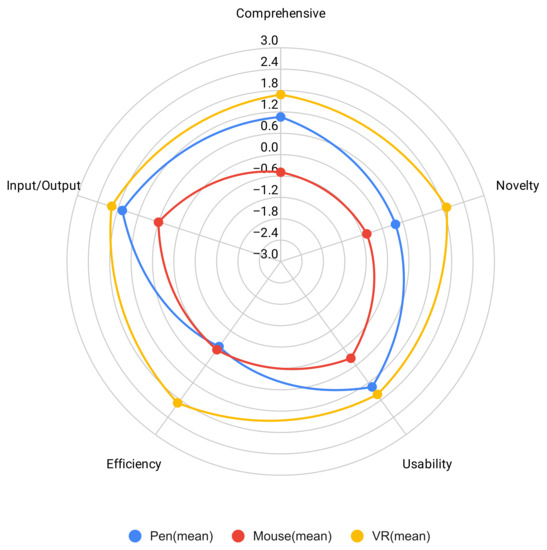
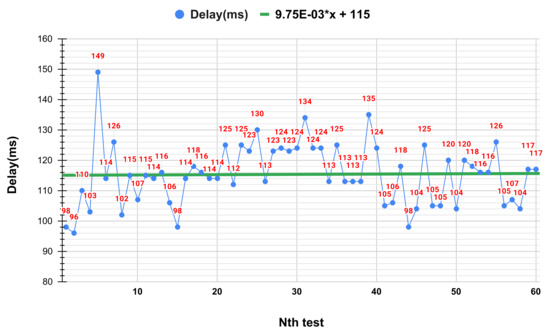
The COVID-19 pandemic has increased the significance of remote collaboration. This study proposes a virtual reality (VR) whiteboard system that enables remote collaboration among multiple participants using natural handwriting. In total, three experiments were conducted to investigate, respectively, collaboration efficiency, user experience, and
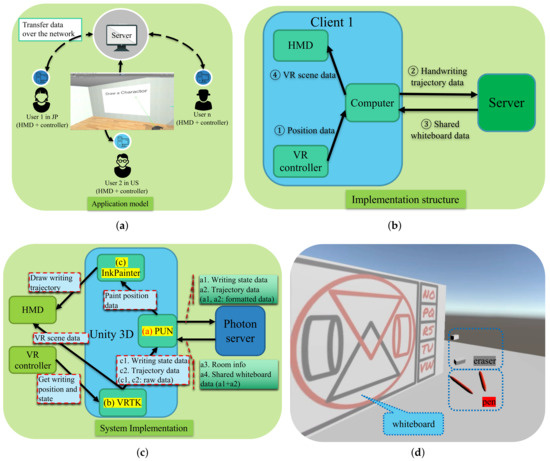
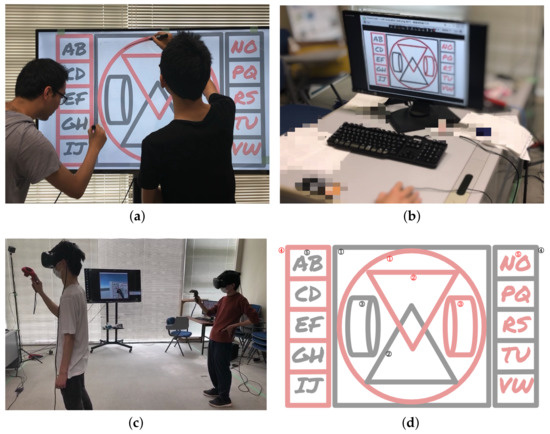
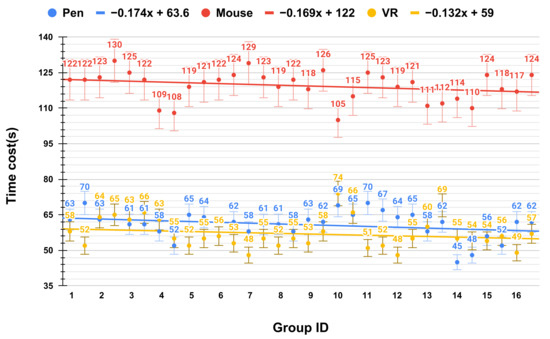
[...] Read more.
The COVID-19 pandemic has increased the significance of remote collaboration. This study proposes a virtual reality (VR) whiteboard system that enables remote collaboration among multiple participants using natural handwriting. In total, three experiments were conducted to investigate, respectively, collaboration efficiency, user experience, and system delay. First, we compared the collaboration efficiency of the traditional whiteboard, the electronic whiteboard, and the proposed virtual reality whiteboard in a series of controlled experiments. It was discovered that the VR whiteboard significantly improves collaboration efficiency in comparison to the mouse-based electronic whiteboard and is comparable to the traditional whiteboard. Second, we assessed the user experience with a survey scale (questionnaires). The subsequent results demonstrate that the VR whiteboard provides a superior user experience in terms of efficiency, usability, etc., compared to the traditional whiteboard. We also measured an end-to-end latency of approximately 115 milliseconds, which is sufficient for remote collaboration.
Full article
►▼
Show Figures
Open AccessArticle
Collective Intelligence in Self-Organized Industrial Cyber-Physical Systems
by
Paulo Leitão, Jonas Queiroz and Lucas Sakurada
Cited by 24 | Viewed by 4168
Abstract
Cyber-physical systems (CPS) play an important role in the implementation of new Industry 4.0 solutions, acting as the backbone infrastructure to host distributed intelligence capabilities and promote the collective intelligence that emerges from the interactions among individuals. This collective intelligence concept provides an
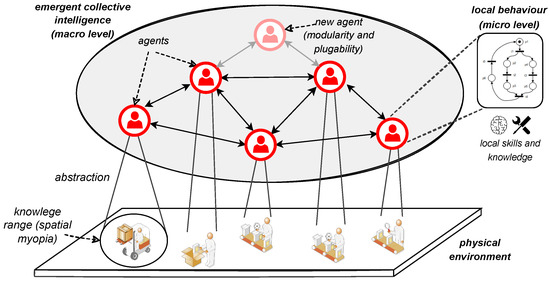
[...] Read more.
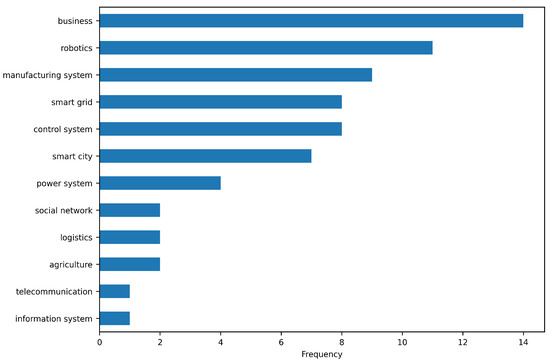
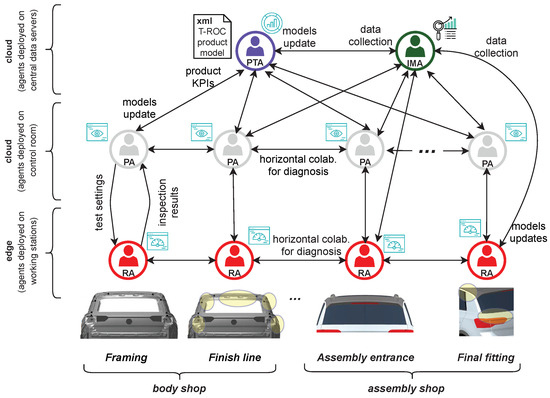
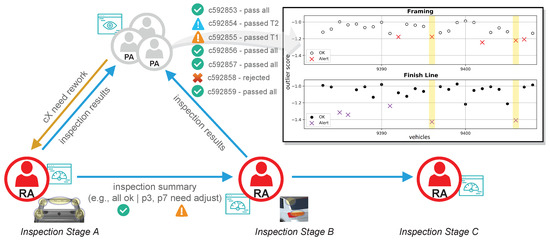
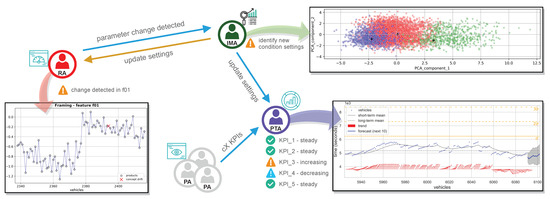
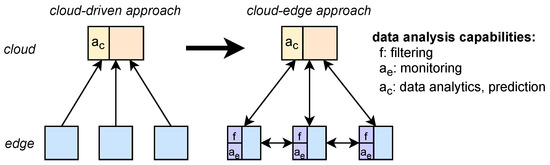
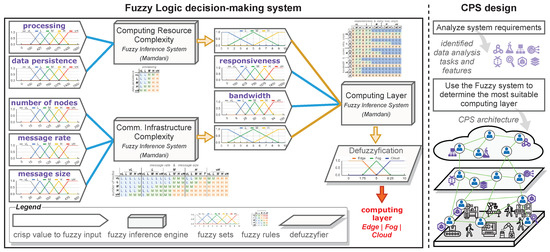
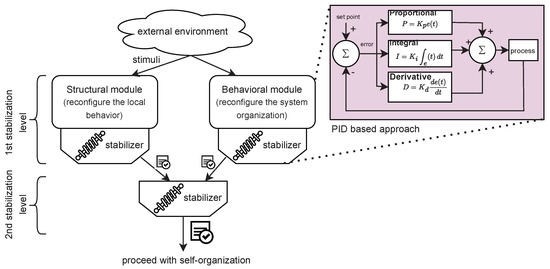
Cyber-physical systems (CPS) play an important role in the implementation of new Industry 4.0 solutions, acting as the backbone infrastructure to host distributed intelligence capabilities and promote the collective intelligence that emerges from the interactions among individuals. This collective intelligence concept provides an alternative way to design complex systems with several benefits, such as modularity, flexibility, robustness, and reconfigurability to condition changes, but it also presents several challenges to be managed (e.g., non-linearity, self-organization, and myopia). With this in mind, this paper discusses the factors that characterize collective intelligence, particularly that associated with industrial CPS, analyzing the enabling concepts, technologies, and application sectors, and providing an illustrative example of its application in an automotive assembly line. The main contribution of the paper focuses on a comprehensive review and analysis of the main aspects, challenges, and research opportunities to be considered for implementing collective intelligence in industrial CPS. The identified challenges are clustered according to five different categories, namely decentralization, emergency, intelligent machines and products, infrastructures and methods, and human integration and ethics. Although the research indicates some potential benefits of using collective intelligence to achieve the desired levels of autonomy and dynamic adaptation of industrial CPS, such approaches are still in the early stages, with perspectives to increase in the coming years. Based on that, they need to be further developed considering some main aspects, for example, related to balancing the distribution of intelligence by the vertical and horizontal dimensions and controlling the nervousness in self-organized systems.
Full article
►▼
Show Figures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}