


Drones 2026, 10(6), 463; https://doi.org/10.3390/drones10060463 (registering DOI) - 14 Jun 2026
Abstract
►
Show Figures
Future planetary exploration missions are expected to employ increasingly sophisticated aerial, ground, and hybrid robotic systems that must interact directly with extraterrestrial regolith during landing, takeoff, mobility, anchoring, sampling, and subsurface investigation activities. Consequently, understanding the mechanical behavior of lunar and Martian regolith
[...] Read more.
Future planetary exploration missions are expected to employ increasingly sophisticated aerial, ground, and hybrid robotic systems that must interact directly with extraterrestrial regolith during landing, takeoff, mobility, anchoring, sampling, and subsurface investigation activities. Consequently, understanding the mechanical behavior of lunar and Martian regolith is essential for the design and reliable operation of autonomous exploration platforms. This review examines drone–regolith interaction from a system-level perspective by integrating knowledge of regolith mechanical properties with findings from penetration mechanics, anchoring technologies, mobility studies, numerical modelling, and in situ mission observations. Key differences between lunar and Martian regolith are identified, highlighting the predominantly friction-driven behavior of lunar soils and the combined frictional–cohesive response frequently observed in Martian regolith. Lessons learned from planetary missions, particularly the Apollo and Mars InSight programs, demonstrate how system–soil mismatch can significantly affect penetration, stabilization, and surface-operation performance. The review further discusses the implications of regolith mechanics for landing stability, rotor–surface interaction, anchoring efficiency, subsurface access, and future drone-assisted exploration concepts. Finally, current challenges in experimental validation and numerical modelling are assessed, emphasizing the need for integrated approaches that combine soil mechanics, robotic system design, and environmental constraints to enable reliable autonomous operations on the Moon and Mars.
Full article
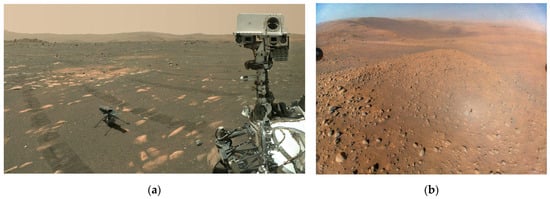
Figure 1



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}