Abstract
The article presents the results of research on the steering effort involved in performing two different maneuvers. One of them was a turning maneuver and the other was a double lane change maneuver. These are typical road maneuvers that result from various traffic situations. During the experiment, the torque acting on the steering wheel, the vehicle speed, and the lateral acceleration values generated during movement were recorded. The object of the study was a light bus equipped with a hydraulic power steering system. Road tests were conducted for three vehicle speeds and four different tire pressures, and the shock absorption properties of the wheels were determined based on performance charts. The tests carried out (cornering maneuver and double lane change) and the values recorded during their implementation, such as vehicle speed, lateral acceleration, steering angle, and steering torque, made it possible to determine the relationship between steering effort and the energy (elasticdamping) properties of the wheels of the tested car.
1. Introduction
Due to the growing electrification of public transport, it is important to plan the energy consumption of public transport precisely. The constant expansion of cities as a result of population migration to their outskirts or to towns directly adjacent to them generates new transport needs. Lower building density and, consequently, lower population density in these areas mean that small buses play an important role in public transport. Small buses also play a key role in public transport in smaller towns. In many cases, they are the only means of public transport.
Many factors influence energy loss when driving a car, including the efficiency of the drive system, tire rolling resistance, air resistance, longitudinal and lateral tire slip, etc. A review of the literature shows that the factors determining the range of an electric car can be divided into two groups. The first group includes external factors such as road conditions, trip duration (which depends, among other things, on driving speed), and the driver’s driving style.
The second group of factors, known as internal factors, includes technical solutions related to the drive system, suspension system, steering assistance, aerodynamic resistance, battery capacity, air conditioning, ventilation, and other devices whose operation increases the demand for electrical energy [1,2,3,4].
The range of cars traveling in urban conditions is significantly influenced by the driver’s driving style [5]. Significant savings in car energy consumption are achieved by longitudinal guidance systems [6,7,8]. Reference [8] describes an energy-efficient longitudinal guidance system for electric vehicles, which, compared to manual control, allows for energy savings of up to 3.4% at the same average speed and increases speed by 2.6% at the same energy consumption. In electric vehicles, all energy requirements are covered by batteries. An increase in electricity demand can significantly reduce their range. The impact of dynamic vehicle movement parameters on the energy demand of electric vehicles, and thus on their effective range, has been analyzed in detail in [9,10,11]. The issue of energy losses generated when cornering in urban traffic conditions is discussed in [9]. The authors of this study presented a model of energy-efficient cornering, although the model did not take into account tire characteristics. Energy losses when cornering by city buses were also analyzed in [12]. It has been shown that the level of energy losses associated with cornering depends on the corner radius and the speed of the vehicle. In the case of routes running through city centers, these losses can exceed even 5% of the total energy of the drive system and therefore should not be ignored.
Car users’ expectations in terms of vibration comfort have led to active suspensions gaining in importance. Unfortunately, classic designs of active and semi-active suspension systems are characterized by low energy efficiency [13,14]. The improvement in the energy efficiency of active suspension systems through the use of actuators based on linear motors was addressed by [15,16,17,18,19]. In ref. [15], it was demonstrated that a coordinated control strategy for an active suspension system using linear motors improves ride comfort and vehicle stability and reduces energy consumption. The regenerative efficiency of such a suspension system is approximately 20%.
Among the key systems of any car, the powertrain has the highest energy demand. In addition to the powertrain [20,21,22], the power steering system also plays a significant role in energy consumption [23].
All classic methods of power steering control have a common feature, which is the use of power steering characteristics (the value of the assist torque depends on the steering wheel torque). Increasing steering wheel torque leads to an increase in assist torque, which decreases degressively as lateral acceleration increases [24].
An interesting proposal in terms of reducing the energy consumption of the car steering assistance system is the use of driving forces to assist car steering. Such systems perform the same functions as conventional systems but require less energy. Research in this area was conducted by [25,26,27,28].
The concept of completely replacing the classic steering assistance system with a system based on the individual drive of each wheel was proposed by [23]. The idea behind this system is that different drive torque values are applied to the steering wheels. Different drive forces between the wheel and the road surface generate torque, which causes the steering wheels to rotate relative to their axis of rotation. The generated torque simultaneously counteracts the self-centering effect of the wheels. The proposed solution was also analyzed in terms of energy consumption, and the results were compared with the energy consumption of classic power steering systems. The research was simulation-based. The analysis used four different test procedures, which included a circular maneuver, a double lane change, a slalom course, and an individual procedure (actual driving route). The energy analysis conducted on the basis of simulation tests showed that steering assistance based on the individual drive of each wheel reduces energy consumption. However, the results of the simulation tests have not been verified in real road conditions.
Comparative studies of energy consumption by conventional, hydraulic, and hybrid power steering systems in heavy commercial vehicles were conducted by [29]. The hybrid power steering system was constructed by combining an electric system with an electrohydraulic power steering system. Simulation results showed that the hybrid system reduces energy consumption by more than 50%. Vehicle tests with the hybrid steering assist system, which were carried out on a chassis dynamometer, showed that it improves the vehicle’s fuel efficiency by 1%.
The literature lacks information on the impact of the type of road maneuver (cornering maneuver, double lane change maneuver) and changes in the stiffness and damping of rubber wheels on the energy consumption of the steering system. Given the importance of small buses, this study attempts to estimate the impact of the elastic damping properties of small bus tires on the energy consumption of the steering assist system.
This study is a continuation of the research we presented in [30]. In the earlier study, we analyzed the steering effort of a passenger car in terms of low driving speeds and the elastic damping properties of the wheels. We changed the elastic damping properties of the wheels by changing the tire pressure. An increase in tire pressure resulted in a decrease in steering effort, while a decrease in pressure resulted in an increase. At lower driving speeds, the impact of the elastic damping properties of the wheels on the steering effort required for steering was greater. The research conducted allowed the authors to conclude that the steering effort for an E-segment car is lower than that for a D-segment car. This difference was greater the lower the speed of the tested cars.
This publication contributes to filling the identified research gap. Its aim is to assess the impact of the type of road maneuver and changes in the stiffness and damping of car wheels on the steering effort of steering and, consequently, on the energy consumption of the steering system. This assessment was based on the steering effort index. The issue was analyzed in terms of low car speeds. Research in this area provides information on the impact of car operating conditions and driving style on the energy consumption of the steering system. The results of the analysis will be used to develop a model for the operational assessment of the energy consumption of the steering system of a small bus. This study consists of two stages. The first was carried out in laboratory conditions, while the second was carried out on a test track. The aim of the research was to identify the stiffness and damping coefficients of the tires of a test car and the steering effort during two road maneuvers.
The rest of the article is structured as follows: Section 2 presents the test object, characterizes the test equipment, and describes the test methodology. The results of the tests are presented in Section 3. The analysis of the test results is presented in Section 4. The final chapter presents the conclusions.
2. Research Methodology
2.1. Test Vehicle
The research vehicle was manufactured in 2011 (Figure 1). It had a body adapted to transport nine people. The curb weight of the car was 2070 kg (tested as a single vehicle with one driver). The steering system had hydraulic power assistance, and the wheels were equipped with summer tubeless radial tires with a width of 205 mm and a height of 133.25 mm. Their diameter on the rim was 16 inches (205/65 R16C Continental ContiVanContact 200, Continental Corporation, Hanover, Germany). The technical condition of the vehicle did not raise any concerns, which was confirmed by diagnostic tests.

Figure 1.
Research vehicle.
2.2. Measuring Apparatus
As part of laboratory tests, the stiffness and damping coefficients of the test vehicle’s wheels were determined. The radial characteristics of the wheels, recorded on the MTS test bench, were used to determine these coefficients.
The key elements of the research station are an electrohydraulic pulsator, an advanced control and data recording system, and a hydraulic power supply system. The pulsator is equipped with force and displacement sensors that enable accurate recording of its operating parameters. The pulsator is equipped with force and displacement sensors, and the signals from them are sent directly to the control system. The pulsator piston has a maximum stroke of 150 mm and a force generation capacity of up to 25 kN [31].
Specialized measuring equipment was used in the field studies:
- -
- Correvit S-350™ optoelectronic sensor (Kistler Group, Winterthur, Switzerland) (longitudinal speed measurement range 0.5–250 km/h) [32].
- -
- Dynamometer steering wheel—for measuring the steering angle in the range of +/- 1250° and the torque on the steering wheel in the range of +/- 50 Nm.
- -
- TANS™ gyroscopic sensor for measuring linear accelerations (Kistler Group) (longitudinal, transverse, vertical, and angular) of the car in the range of +/- 3 g [33].
- -
- uEEP 12 Datron® data acquisition station with a computer and software.
The measuring circuit constructed from the above-mentioned equipment enabled simultaneous data recording, which was carried out at a frequency of 128 Hz during the first stage of the tests and at a frequency of 100 Hz during the second stage.
2.3. Testing Procedure
The research program was divided into two stages, which were conducted in different research environments:
- -
- In laboratory conditions.
- -
- In field conditions, on a test track.
In the first stage of the experiment, the radial characteristics were determined for four different air pressures in the wheels: 125% of nominal pressure, 100% of nominal pressure, 75% of nominal pressure, and 50% of nominal pressure.
The radial characteristic consists of two components: elastic and damping (Formula (1)).
where
—tire deflection, m;
—tire deflection speed, m/s.
The symbols and were adopted for the upper branch of the hysteresis loop, determined during compression, and the lower branch, obtained during unloading, respectively. The elastic component, corresponding to the center axis of the loop (Figure 2), was determined based on Formula (2).
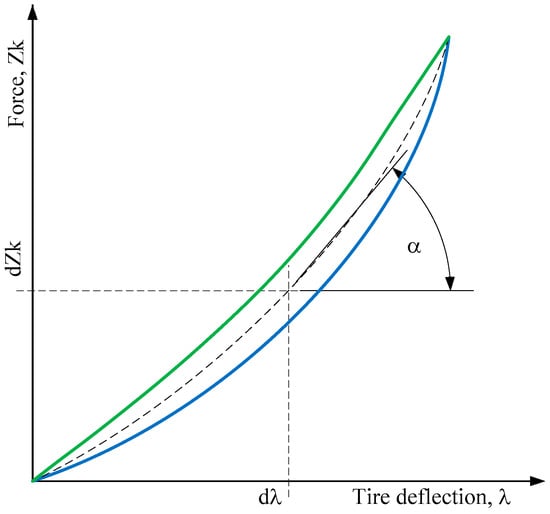
Figure 2.
Method of determining the radial stiffness coefficient of a tire (k).
Based on the centerline curve, the radial stiffness coefficients of the wheels were determined, which are a derivative of the wheel load relative to the tire deflection, determined at the centerline curve point for static load (3).
After subtracting and from (the skeleton line in the graph), the lower and upper branches of the performance graph (pure damping loop) were obtained (Figure 3).
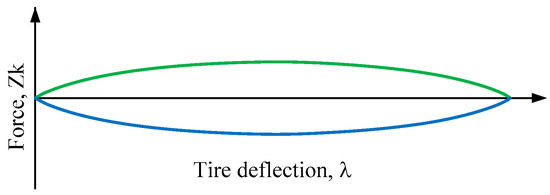
Figure 3.
Graph of tire performance without elasticity component.
Since the wheel loading speed was known at each point of the radial characteristic (Figure 2), the damping characteristic was determined for each of these characteristics (Figure 4).
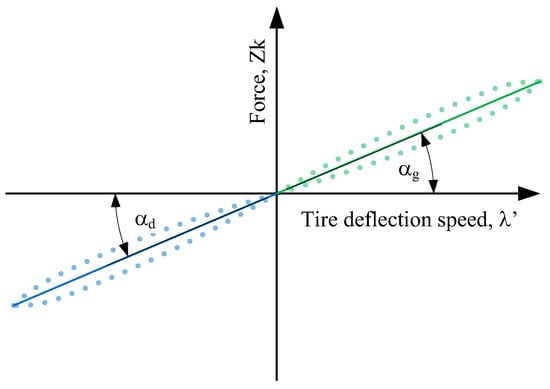
Figure 4.
Wheel damping characteristic.
For the damping characteristics, skeleton axes were determined and regression lines were determined for these axes. The directional coefficients of the regression lines of the skeleton axes are the damping coefficients of the tested tire. The authors described the method of determining these coefficients in detail in earlier articles [30,31].
In the second stage, several dozen tests of two different maneuvers were carried out on the test track. One of them was a cornering maneuver, while the other was a double lane change maneuver [34].The cornering maneuver was defined as a forced maneuver in the form of half a sine wave and was performed on a lane with a width of 2720 mm (Figure 5). The tests were carried out in three measurement series. Each series was conducted for a different tire pressure value in the test car, for which the radial characteristics of the wheels were determined in the first stage of the study.
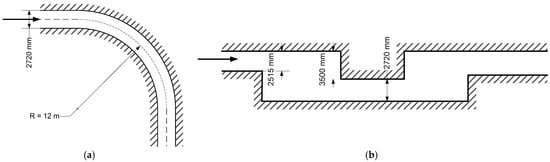
Figure 5.
Track diagram: (a) cornering maneuver; (b) double lane change maneuver.
One series consisted of fifteen tests (five for each of the three car speeds, which were 10 km/h, 20 km/h, and 30 km/h). During the tests, which involved a cornering maneuver or a double lane change maneuver, the following were recorded: the longitudinal speed of the car, lateral acceleration, and the steering wheel angle and torque.
3. Results
The radial characteristics of the wheels, determined in laboratory tests, allowed the identification of stiffness and damping coefficients, which are presented in Table 1.

Table 1.
Stiffness and damping coefficient values for the test car’s tires.
The correlation coefficients between pressure and stiffness coefficient and between pressure and damping coefficient are very high. An increase in pressure caused an increase in the stiffness coefficient (positive correlation coefficient) with a simultaneous decrease in the damping coefficient (negative correlation coefficient).
During the execution of cornering maneuvers and double lane change maneuvers, the following were recorded:
- -
- Longitudinal speed of the car.
- -
- Lateral acceleration of the car (ay).
- -
- Steering wheel torque (MH).
- -
- Steering wheel angle (δH).
- -
- Steering wheel rotation speed.
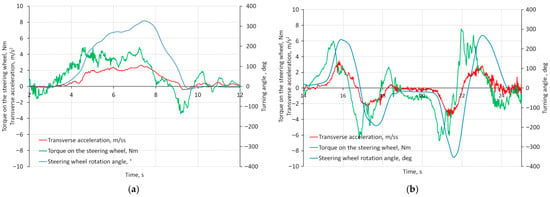
Figure 6.
Example waveforms of torque, steering wheel rotation angle, and lateral acceleration recorded during the maneuver: (a) cornering maneuver; (b) double lane change.
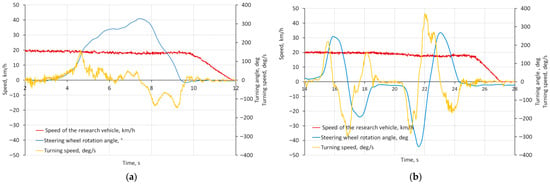
Figure 7.
Example curves of the test car’s speed, steering wheel angle, and steering wheel rotation speed during the maneuver: (a) cornering maneuver; (b) double lane change.
Analyzing the steering wheel movement, it can be concluded that the maneuvers were performed smoothly and that the driver had a clear vision of how to perform them.
The changes in steering torque and lateral acceleration recorded during the tests were characterized by considerable variability, which may indicate that the driver made minor corrections while performing maneuvers. Minor corrections to the driving path made by the driver are not always easy to identify. The identification of these corrections is facilitated by the analysis of the recorded derivative of the steering wheel angle (steering wheel rotation speed) over time (Figure 7).
In most cases, the maneuvers began at the assumed speed of the test car, but in most cases, the speed decreased slightly during the maneuvers. If the speed of the test car at the start of the maneuver or during the maneuver differed from the assumed speed by more than 10%, the maneuver was repeated.
4. Discussion
The steering effort index was used to assess the energy consumption of the maneuvers tested. The literature on the subject distinguishes between two similar-sounding concepts: steering effort and driver effort. Despite their similarity, these concepts are defined differently. The concept of steering effort has significantly more interpretations. The different interpretations of this concept show that it is also understood in different ways. According to [35], steering effort is the product of the increase in the steering wheel angle relative to the normalized lateral acceleration (Figure 8) and the increase in torque on the steering wheel relative to the normalized lateral acceleration (Figure 9). It has been described in detail in earlier publications [30].The derivatives ( and ) were calculated based on experimental data using linear regression (Figure 8 and Figure 9).
where
—steering effort, Nm°.
—increase in the steering wheel rotation angle, °.
—increase in lateral acceleration normalized to gravitational acceleration.
—increase in torque on the steering wheel, Nm.

Figure 8.
Example relationships between the steering wheel angle and lateral acceleration determined for a test car performing the following maneuvers: (a) cornering maneuver; (b) double lane change.
Figure 8.
Example relationships between the steering wheel angle and lateral acceleration determined for a test car performing the following maneuvers: (a) cornering maneuver; (b) double lane change.


Figure 9.
Example relationships between steering wheel torque and lateral acceleration determined for a test car performing the following maneuvers: (a) cornering maneuver; (b) double lane change.
Figure 9.
Example relationships between steering wheel torque and lateral acceleration determined for a test car performing the following maneuvers: (a) cornering maneuver; (b) double lane change.

A decrease in vehicle speed (below 25 km/h) causes a significant increase in the steering wheel rotation angle and the steering wheel torque relative to lateral acceleration (Table 2 and Table 3). In addition to speed, the steering effort index is significantly influenced by the spring-damping properties of the tires.
Table 2.
Average values of regression line direction coefficients dδH/day and dMH/day determined for a cornering maneuver.
Table 3.
Average values of regression line direction coefficients dδH/day and dMH/day determined for a double lane change maneuver.
The results of the tests (steering effort index values) are presented in Table 4 and Figure 10, Figure 11 and Figure 12. These values for the turning maneuver range from 5055.15 Nm° to 117,634.70 Nm°. The steering effort values for the double lane change maneuver fall within a slightly narrower range, from 6429.53 Nm° to 107,322.50 Nm°. If the steering effort falls within the range of 1050–26,250 Nm°, it should be considered optimal according to [29]. The steering effort analysis showed that the values determined for a car traveling at a speed greater than or equal to 20 km/h fall within the optimal range. The steering effort index values determined for a speed of 10 km/h exceed the range considered optimal. The highest exceedances are even four times higher than the recommended value. They were obtained when the tire pressure of the tested car was 50% of the nominal pressure. The analysis also shows that, under the same conditions, in the vast majority of cases, the double lane change maneuver was more energy-intensive than the cornering maneuver. Out of twelve cases, the situation was reversed in only one, with the cornering maneuver being more energy-intensive than the double lane change maneuver.
Table 4.
Summary of steering effort index values for a test car performing a cornering maneuver and double lane change.
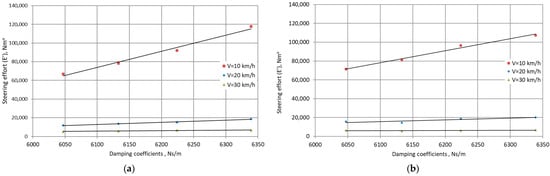
Figure 10.
The influence of the damping coefficient determined during the wheel loading cycle on the steering effort for (a) cornering maneuver; (b) double lane change maneuver.
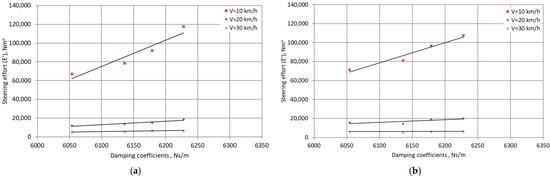
Figure 11.
The influence of the damping coefficient determined during the wheel unloading cycle on the steering effort for (a) cornering maneuver; (b) double lane change maneuver.
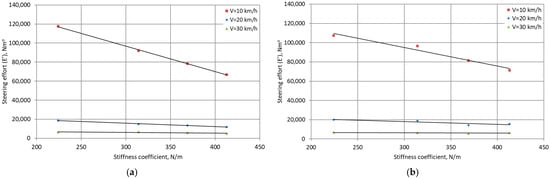
Figure 12.
Relationship between steering effort and wheel stiffness coefficient for (a) cornering maneuver; (b) double lane change maneuver.
The correlation between steering effort and the elastic damping properties of the wheels is very high in most of the analyzed cases (correlation coefficient > 0.9). In five cases, the correlation should be assessed as high and the relationship as significant. These were two cases during which a cornering maneuver was performed and three cases during which a double lane change maneuver was performed. The correlation between the elastic damping properties and the steering effort in two cases should be assessed as moderate, as the correlation coefficient ranges from 0.4 to 0.7. It was recorded for a double lane change maneuver performed at a speed of 30 km/h. Only in one case was the correlation coefficient less than 0.4 but greater than 0.2. Such a correlation should be assessed as low, but at the same time, it indicates a clear but small relationship (Table 5).
Table 5.
Correlation of tire damping coefficients with the steering effort index for the maneuver of entering a curve and double lane change.
For more than half of the cases analyzed, the coefficient of determination exceeded 0.8. This indicates a good or very good fit of the data to the regression line. In five cases, the coefficient of determination reached a satisfactory level, with values ranging from 0.5 to 0.79. Unfortunately, there were also cases where the determined coefficient of determination did not exceed 0.50 (Table 6).
Table 6.
Values of determination coefficients.
The values of the correlation coefficients and coefficients of determination obtained may have been significantly influenced by the smoothness of the steering wheel movement. One way to eliminate minor corrections to the driving path by the driver may be to use a control robot or to conduct tests with a larger number of drivers.
5. Conclusions
The article analyzes the impact of elastic damping properties and low speeds on the driver’s energy expenditure during cornering and double lane changes. The maneuvers were performed with a small bus. The experiment was conducted at low speeds typical of cars in congested cities. The adopted vehicle movement parameters made it possible to obtain lateral accelerations that are typical for average urban traffic conditions. The experiment showed that changing the elastic properties of rubber-tired wheels affects the energy expenditure of the driver performing the analyzed maneuvers.
The authors concluded that:
- -
- An increase in the speed of the car performing the maneuvers causes a decrease in the gradient of the steering wheel torque and the steering wheel angle relative to lateral acceleration.
- -
- An increase in the stiffness of the wheels of the tested car causes a decrease in the gradient of the steering wheel torque and the gradient of the steering wheel angle relative to lateral acceleration.
- -
- The influence of the stiffness coefficient on the steering effort required for steering is greater the lower the speed of the car.
- -
- An increase in the damping coefficient of the wheels of the tested car causes an increase in the gradient of the steering wheel torque and the gradient of the steering wheel angle relative to lateral acceleration.
- -
- The lower the speed of the car, the greater the impact of the damping coefficient on the energy required for steering.
Reducing tire pressure reduces tire stiffness and increases the contact area between the tire and the road surface. Increasing this area changes the distribution of unit tangential forces between the tire and the road surface, resulting in an increase in stabilizing torque. In turn, an increase in stabilizing torque increases the amount of torque required to steer the car.
The above relationships are confirmed by the correlation coefficients, which were very high at a speed of 10 km/h. An increase in speed caused a decrease in the correlation coefficients.
A unique finding is the correlation of changes in tire properties with the energy consumption of the maneuvers performed. In most cases, double lane change maneuvers were more energy-intensive than cornering maneuvers. Only in one case was the opposite situation observed. This was when the maneuver was performed at a speed of 10 km/h and when the tire pressure was reduced by 50% compared to the nominal pressure.
In addition to the elastic damping properties of the wheels, speed, and type of maneuver, the correctness of the maneuvers can have a significant impact on the steering effort index. The literature shows that various criteria can be used to assess the correctness of maneuvers. These criteria include, among others, the accuracy of maneuver execution and the avoidance of sudden steering movements. The impact of the correctness of maneuver execution on steering effort and the energy consumption of the steering system will be the subject of further research.
Author Contributions
Conceptualization, A.Z. and J.J.; methodology, A.Z. and J.J.; software, A.Z. and J.J.; validation, A.Z. and D.Ż.; formal analysis, A.Z., J.J. and D.Ż.; investigation, A.Z.; resources, A.Z.; data curation, A.Z. and J.J.; writing—original draft preparation, A.Z. and J.J.; writing—review and editing, A.Z., J.J. and D.Ż.; visualization, A.Z. and J.J.; supervision. J.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financed by the Military University of Technology under research project 531-000102-W100-22, and the Faculty of Mechatronics and Mechanical Engineering Kielce University of Technology.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Pennycott, A.; Novellis, L.D.; Gruber, P.; Sorniotti, A. Sources of energy loss during torque-vectoring for fully electric vehicles. Int. J. Veh. Des. 2014, 67, 157–177. [Google Scholar] [CrossRef]
- Qi, Z. Advances on air conditioning and heat pump system in electric vehicles—A review. Renew. Sustain. Energy Rev. 2014, 38, 754–764. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P. Optimal Wheel Torque Distribution for a Four-Wheel-Drive Fully Electric Vehicle. SAE Int. J. Passeng. Cars-Mech. Syst. 2013, 6, 128–136. [Google Scholar] [CrossRef]
- Vacca, F.; De Pinto, S.; HartaviKarci, A.E.; Gruber, P.; Viotto, F.; Cavallino, C.; Rossi, J.; Sorniotti, A. On the Energy Efficiency of Dual Clutch Transmissions and Automated Manual Transmissions. Energies 2017, 10, 1562. [Google Scholar] [CrossRef]
- Araque, E.S.; Colin, G.; Cloarec, G.M.; Ketfi-Cherif, A.; Chamaillard, Y. Energy analysis of eco-driving maneuvers on electric vehicles. IFAC-PapersOnLine 2018, 51, 195–200. [Google Scholar] [CrossRef]
- Radke, T. Energieoptimale Längsführung von Kraftfahrzeugen Durch Einsatz Vorausschauender Fahrstrategien; Karlsruher Institut für Technologie: Karlsruhe, Germany, 2013. [Google Scholar]
- Markschläger, P.; Wahl, H.G.; Weberbauera, F.; Lederer, M. Assistenzsystem für mehr Kraftstoffeffizienz. In Vernetztes Automobil: Sicherheit–Car-IT–Konzepte; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014; pp. 146–153. [Google Scholar]
- Jauch, J.; Bleimund, F.; Frey, M.; Gauterin, F. Automated Longitudinal Control Based on Nonlinear Recursive B-Spline Approximation for Battery Electric Vehicles. World Electr. Veh. J. 2019, 10, 52. [Google Scholar] [CrossRef]
- Padilla, G.; Pelosi, C.; Beckers, C.; Donkers, M. Eco-Driving for Energy Efficient Cornering of Electric Vehicles in Urban Scenarios. IFAC-PapersOnLine 2020, 53, 13816–13821. [Google Scholar] [CrossRef]
- Liao, P.; Tang, T.-Q.; Liu, R.; Huang, H.-J. An eco-driving strategy for electric vehicle based on the powertrain. Appl. Energy 2021, 302, 117583. [Google Scholar] [CrossRef]
- Kozłowski, E.; Wiśniowski, P.; Gis, M.; Zimakowska-Laskowska, M.; Borucka, A. Vehicle Acceleration and Speed as Factors Determining Energy Consumption in Electric Vehicles. Energies 2024, 17, 4051. [Google Scholar] [CrossRef]
- Beckers, C.J.; Besselink, I.J.; Nijmeijer, H. Assessing the impact of cornering losses on the energy consumption of electric city buses. Transp. Res. Part D Transp. Environ. 2020, 86, 102360. [Google Scholar] [CrossRef]
- Jiang, C.; Yao, J. Height Control and Experimental Study of Linear Motor-Based Active Suspension Systems. Electronics 2025, 14, 2482. [Google Scholar] [CrossRef]
- Yao, J.; Wang, S.; Chen, A.; Tian, J.; Wang, Z.; Guo, L. Semi-active actuator-based hybrid model predictive control for vehicle tilting. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2025, 09544070251335696. [Google Scholar] [CrossRef]
- Kou, F.; Chen, L.; Zhang, D. Energy Management Strategy for Active Suspension with Linear Motor. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 419–423. [Google Scholar]
- Silveira, M.; Wahi, P.; Fernandes, J.C.M. Exact and Approximate Analytical Solutions of Oscillator with Piecewise Linear Asymmetrical Damping. Int. J. Non-Linear Mech. 2019, 110, 115–122. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Ortiz, A.; Mendez, E.; Balderas, D.; Ponce, P.; Macias, I.; Molina, A. Hardware Implementation of Metaheuristics through LabVIEW FPGA. Appl. Soft Comput. 2021, 113, 107908. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Zhang, W.; Zhao, F. IC-GLI: A Real-Time, INS-Centric GNSS-LiDAR-IMU Localization System for Intelligent Vehicles. Meas. Sci. Technol. 2025, 36, 026314. [Google Scholar] [CrossRef]
- Lin, C.; Xu, Z. Wheel Torque Distribution of Four-Wheel-Drive Electric Vehicles Based on Multi-Objective Optimization. Energies 2015, 8, 3815–3831. [Google Scholar] [CrossRef]
- Julio-Rodríguez, J.d.C.; Santana-Díaz, A.; Ramirez-Mendoza, R.A. Individual Drive-Wheel Energy Management for Rear-Traction Electric Vehicles with In-Wheel Motors. Appl. Sci. 2021, 11, 4679. [Google Scholar] [CrossRef]
- Salamone, S.; Lenzo, B.; Lutzemberger, G.; Bucchi, F.; Sani, L. On the Investigation of Energy Efficient Torque Distribution Strategies through a Comprehensive Powertrain Model. Sustainability 2021, 13, 4549. [Google Scholar] [CrossRef]
- Römer, J.; Kautzmann, P.; Frey, M.; Gauterin, F. Reducing Energy Demand Using Wheel-Individual Electric Drives to Substitute EPS-Systems. Energies 2018, 11, 247. [Google Scholar] [CrossRef]
- Harrer, M.; Pfeffer, P. Steering Handbook; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-05449-0. [Google Scholar]
- Li-Qiang, J.; Song, C.; Hu, C. Driving Force Power Steering for the Electric Vehicles with Motorized Wheels. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 1518–1524. [Google Scholar]
- Polmans, K.; Stracke, S. Torque vectoring as redundant steering for automated driving or steer-by-wire. In 5th International Munich Chassis Symposium 2014; Pfeffer, P.E., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014. [Google Scholar]
- Wang, J.; Wang, Q.; Jin, L.; Song, C. Independent Wheel Torque Control of 4WD Electric Vehicle for Differential Drive Assisted Steering. Mechatronics 2011, 21, 63–76. [Google Scholar] [CrossRef]
- Gauger, A.; Kern, A.; Kanngießer, S.; Greul, R. Potential of wheel individual brake interventions as a backup for steering systems failures during automated driving. In 7th International Munich Chassis Symposium 2016; Pfeffer, P.E., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2016. [Google Scholar]
- Park, J.I.; Jeon, K.; Yi, K. An investigation on the energy-saving effect of a hybrid electric-power steering system for commercial vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1623–1648. [Google Scholar] [CrossRef]
- Zuska, A.; Jackowski, J. Analysis of Energy Effort in Terms of Changes in Stiffness and Damping of Tire Wheels and Low Car Speed. Energies 2024, 17, 5948. [Google Scholar] [CrossRef]
- Zuska, A.; Jackowski, J. Influence of Changes in Stiffness and Damping of Tyre Wheels on the Outcome of the Condition Assessment of Motor Vehicle Shock Absorbers. Energies 2023, 16, 3876. [Google Scholar] [CrossRef]
- Correvit® S-350 Non-Contact Optical Sensors. Type CS350A. Kistler Patent No. DE 43 13 497 C2. Available online: https://www.kistler.com/files/document/000-807e.pdf (accessed on 14 March 2022).
- Kistler. Acceleration Modules SAA (1-Axis). DAA (2-Axis). TAA (3-Axis).Type KCD15760. KCD15951. KCD15911. Available online: https://www.kistler.com/files/document/000-913e.pdf?callee=frontend (accessed on 14 March 2022).
- ISO 3888-1; Passenger Cars—Test Track for a Severe Lane-Change Manoeuvre—Part 1: Double Lane-Change. ISO (International Standard Organization): Geneva, Switzerland, 1999.
- Jaksch, F.O. Driver-Vehicle Interaction with Respect to Steering ControllabilitySAE Technical Paper. No. 790740. 1979. Available online: https://saemobilus.sae.org/papers/driver-vehicle-interaction-respect-steering-controllability-790740 (accessed on 1 October 2024).










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.