- Review

Visual and Visual–Inertial SLAM for UGV Navigation in Unstructured Natural Environments: A Survey of Challenges and Deep Learning Advances
- Tiago Pereira,
- Carlos Viegas and
- Nuno Ferreira
- + 1 author
Localization and mapping remain critical challenges for Unmanned Ground Vehicles (UGVs) operating in unstructured natural environments, such as forests and agricultural fields. While Visual SLAM (VSLAM) and Visual–Inertial SLAM (VI-SLAM) have matured significantly in structured and urban scenarios, their extension to outdoor natural domains introduces severe challenges, including dynamic vegetation, illumination variations, a lack of distinctive features, and degraded GNSS availability. Recent advances in Deep Learning have brought promising developments to VSLAM- and VI-SLAM-based pipelines, ranging from learned feature extraction and matching to self-supervised monocular depth prediction and differentiable end-to-end SLAM frameworks. Furthermore, emerging methods for adaptive sensor fusion, leveraging attention mechanisms and reinforcement learning, open new opportunities to improve robustness by dynamically weighting the contributions of camera and IMU measurements. This review provides a comprehensive overview of Visual and Visual–Inertial SLAM for UGVs in unstructured environments, highlighting the challenges posed by natural contexts and the limitations of current pipelines. Classic VI-SLAM frameworks and recent Deep-Learning-based approaches were systematically reviewed. Special attention is given to field robotics applications in agriculture and forestry, where low-cost sensors and robustness against environmental variability are essential. Finally, open research directions are discussed, including self-supervised representation learning, adaptive sensor confidence models, and scalable low-cost alternatives. By identifying key gaps and opportunities, this work aims to guide future research toward resilient, adaptive, and economically viable VSLAM and VI-SLAM pipelines, tailored for UGV navigation in unstructured natural environments.
2 February 2026

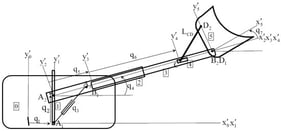
![Kinematic scheme of the Athena parallel robot (reprinted from ref. [32]).](https://mdpi-res.com/cdn-cgi/image/w=281,h=192/https://mdpi-res.com/robotics/robotics-15-00033/article_deploy/html/images/robotics-15-00033-g001-550.jpg)