

J. Mar. Sci. Eng., Volume 12, Issue 9 (September 2024) – 228 articles
Cover Story (view full-size image):
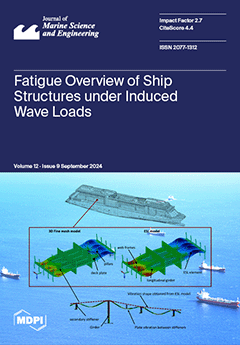
Fatigue damage represents a key failure mode in ship structures, with such damage typically beginning at vulnerable points in the structure. Cyclic loading, particularly from waves, encountered by ships during their operational life is a major cause of fatigue damage, which is the main focus of this study. This paper aims to review the most commonly used methods to highlight their strengths and weaknesses and to provide essential background knowledge for developing reliable theoretical and numerical models for predicting the fatigue life of ship structures exposed to various sea states over their lifetime. The discussion also covers the determination of cyclic stress in specific structural details of the hull girder and welded joints to identify the relevant maximum stress range for subsequent fatigue studies conducted using finite element analysis. View this paper
- Issues are regarded as officially published after their release is announced to the table of contents alert mailing list.
- You may sign up for e-mail alerts to receive table of contents of newly released issues.
- PDF is the official format for papers published in both, html and pdf forms. To view the papers in pdf format, click on the "PDF Full-text" link, and use the free Adobe Reader to open them.
Previous Issue
Next Issue