






Future Transp. 2026, 6(3), 104; https://doi.org/10.3390/futuretransp6030104 - 11 May 2026
Abstract
The transformation of transport is necessary not only for climate change mitigation, but also for increasing competitiveness, developing modern technologies in transport, and improving the well-being and quality of life of the population. This article discusses the current state of the transformation of
[...] Read more.
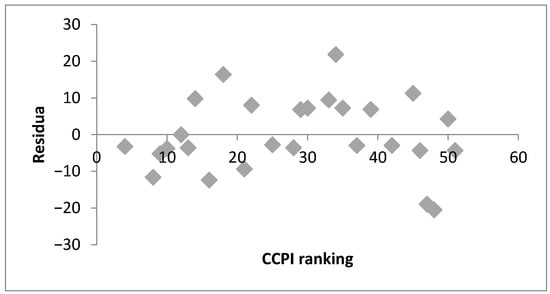
The transformation of transport is necessary not only for climate change mitigation, but also for increasing competitiveness, developing modern technologies in transport, and improving the well-being and quality of life of the population. This article discusses the current state of the transformation of transport and infrastructure to low/zero emission within EU member states and, in particular, their smart cities. This article discusses the challenges, modern technologies, disadvantaged groups and overall concept of transformation with the aim of designing the most effective strategy for transport transformation in the EU, potentially at the smart cities level. The potential relationship between the position of EU member states in the Climate Change Performance Index (CCPI) ranking and different environmental and non-environmental indicators in the EU is identified and analyzed. Regression and ordered logit models are calculated. The results show that only minimum indicators are not correlated, and greenhouse gas emission (GHG), urbanization rate in the EU member state and the ratio of private car ownership to public transport usage have a significant impact on the potential transformation of transportation and a country’s ranking in the CCPI. The odds ratio for urbanization rate is 3.18 (+1 means better ranking 24 times greater) and 4.68 for the ratio of private car ownership to public transport usage (+1 means better ranking 108 times greater). The discussion of the article defines research trends aimed at improving the level of transport transformation and challenges related to successful transformation.
Full article
(This article belongs to the Special Issue Innovative Transport Systems: Integrating Urban Logistics, Environmental Impact, and Climate Resilience)
►
Show Figures
Figure 1


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}