Abstract
The reliability and efficiency of induction motors in Industry 4.0 environments critically depend on advanced fault detection systems capable of real-time monitoring and diagnosis. This paper presents a novel deep learning approach combining convolutional neural networks (CNNs) and long short-term memory (LSTM) networks for automated detection and classification of inter-turn short-circuit faults in three-phase induction motors. Our methodology processes three-phase current signals through a sophisticated CNN-LSTM architecture that extracts both spatial and temporal fault patterns. The proposed system classifies seven distinct motor conditions: healthy operation, three levels of high-impedance faults (HI-1 to HI-3), and three levels of low-impedance faults (LI-1 to LI-3). Experimental validation demonstrates exceptional performance, with the CNN-LSTM model achieving 97.2% accuracy, significantly outperforming traditional machine learning approaches, including SVM (66.3%), Random Forest (67.4%), and KNN (78.1%). The system provides real-time fault classification with inference times under 3 ms, making it suitable for continuous monitoring in smart manufacturing environments.
1. Introduction
Advancements in manufacturing, supply chain management, and logistics are being driven by Industry 4.0 concepts and technologies. Requirements of smart manufacturing systems are met by the operation of industrial production lines. It is essential that production meets sustainability requirements and operates smoothly in a fully automated and interconnected environment. Smart manufacturing requires a process called machine maintenance to function properly.
Induction motors are widely used in industries due to their high efficiency, performance, and reliability [1]. Asynchronous motors are responsible for of industrial production around the world such as elevators, pumps, fans, compressors, conveyor belts, crushers, mills, mixers, presses, grinders, centrifugal machines, packaging equipment, and industrial processes [2].
The deterioration of a machine results from various factors, such as continuous exposure to harsh environmental conditions, improper usage, and the absence of preventive maintenance measures. Ultimately, these issues lead to the emergence of various faults in induction motors [3,4]. Failure rates are conservatively estimated as 3–5% per year [5], with the most common ones being related to bearing faults, stator or rotor insulation faults, open bars or cracking of the rings, and eccentricity [4,6]. Repairing them after sudden failures incurs substantial expenses. To address these challenges, industries are increasingly turning to predictive maintenance methods to avert unplanned shutdowns and guarantee lower maintenance costs. The degradation of insulation is a primary focus of this study. Approximately 40% of all motor failures result from inter-turn short-circuit currents occurring in the stator winding [4,7]. The primary characteristic of this issue is the presence of a high-impedance fault at the onset [8]. Detecting short-circuit currents during the early stages is challenging due to their low intensity. Actually, even minor short-circuit currents can lead to gradual localized heating at the site of the fault. Over time, as the insulation deteriorates, the fault can spread rapidly throughout the winding [9]. Identifying such issues early on through a method known as incipient inter-turn fault diagnosis empowers maintenance teams to take proactive measures, averting sudden production line stoppages and minimizing damage to induction machinery [10].
The main objective of this work is to categorize inter-turn short-circuit faults in the induction motor through the analysis of current signals:
- 1.
- The open-source dataset of the three-phase induction motor is available on the Kaggle Dataset and is used to extract the data’s time, frequency, and time-frequency domain features.
- 2.
- DL models are used to classify inter-turn short-circuit faults with different impedance levels by extracting time-domain and frequency-domain features.
- 3.
- This study offers a practical method for detecting both the fault type and the impedance level using CNN-LSTM.
This work makes the following novel contributions to motor fault diagnosis:
- 1.
- A novel CNN-LSTM hybrid architecture specifically optimized for three-phase induction motor fault detection, with progressive filter expansion (32→64 Conv1D) and strategic multi-stage regularization, achieving 97.2% accuracy.
- 2.
- Simultaneous three-phase current signal processing, enabling comprehensive fault characterization superior to single-phase analysis approaches commonly used in the existing literature.
- 3.
- Multi-level fault severity classification (seven classes) distinguishing between high-impedance and low-impedance faults across three severity levels, providing detailed diagnostic information for maintenance planning.
- 4.
- Comprehensive robustness evaluation under varying SNR (down to 10 dB), load (0–100%), and frequency (45–55 Hz) conditions, demonstrating practical applicability in industrial environments.
- 5.
- Systematic ablation study demonstrating synergistic benefits (3.4% accuracy improvement) of combined CNN-LSTM architecture over individual components.
- 6.
- Real-time inference optimization achieving < 3 ms latency suitable for continuous industrial monitoring without production interference.
2. Related Work
Due to their reliability, affordability, and durability, induction motors are widely used in various industries and commercial sectors. The majority of all failures are caused by stator failures in induction motors, with nearly being due to inter-turn short-circuit faults [11]. These inter-turn faults can become more severe and costly if they are not noticed at first. Hence, it is crucial to detect faults early and accurately to safeguard the machinery’s integrity and operation [12]. There are various diagnostic techniques that have been studied and evaluated, including the Park Vector Difference Approach [13], motor current signature analysis (MCSA) based on FFT [14], and machine learning-based classifiers for condition monitoring and diagnosis of fault [15].
2.1. Park Vector Difference Approach
Luo, P. et al. [13] proposed Park’s Vector Difference Approach (PVDA) for the detection of stator winding fault in the induction motor.
Park’s Vector Difference Approach (PVDA) is one of the most efficient methods to accurately identify inter-turn short-circuit faults.
The inter-turn short-circuit (ITSC) fault in induction motors has been identified using the wavelet transform algorithm and sophisticated digital signal processing methods [16]. Specifically, the discrete wavelet transform is employed on the modulus of the Park’s vector of current signals [13]. Analyzing stator currents has emerged as a widely used fault diagnostic technique for detecting common faults in electrical rotating machinery [17].
2.2. Motor Current Signature Analysis (MCSA) Approach
Motor Current Signature Analysis (MCSA) is based on FFT analysis of instantaneous values recorded from the simulation [18]. The majority of induction motor fault diagnosis, which was initiated around four decades ago, was done using fast Fourier transform (FFT)-based tools to analyze the motor current or vibration signature [19,20,21,22]. FFT has some drawbacks, such as the masking of characteristic frequencies (usually small frequencies) by the supply frequency and its inability to handle transient signals.
Mejia-Barron et al. [23] explored how neural networks can be used with MCSA, and Sarkar et al. [24] focused on the usage of NI Compact RIO for detecting stator issues. Currently, various new techniques based on IA are being employed to overcome these limitations.
2.3. IA Approach
Artificial intelligence has taken over traditional approaches for detecting faults in induction motors due to the substantial volume of data involved. Recent research has centered on the implementation of AI automation that is based on signals and enhanced signal processing. In single-phase IMs, Ballal et al. [25] proposed the neural fuzzy adaptive method for detecting stator inter-turn faults. In machine learning, k-nearest neighbor (KNN), naive Bayes (NB), Random Forest (RF), and support vector machines (SVMs) are employed in [26,27,28] to detect broken rotor bar faults. To identify ITSC faults in an induction motor under different load conditions, a diagnostic tool was developed in [29]. Using the proposed method, the testing accuracies achieved by the RF, SVM, KNN, and DT classifiers were , , , and , respectively, as also reported in [20].
Palácios et al. [30] provide a comprehensive approach for fault diagnosis using AI classifiers for motor fault identification, including NB, KNN, SVM and MLP with accuracies of , , , and , respectively, based on the amplitudes of current signals in the time domain. Bazan et al. [11] described an ANN-based approach for stator fault analysis. Although the classification results were obtained to various conditions of load torque and power supply voltage unbalance, they still achieved accuracy levels of over .
In [31], an Adaptive Network-based Fuzzy Inference System (ANFIS) was proposed as a powerful tool for diagnosing IM faults. Effective diagnosis of mechanical and electrical failures in IM can be achieved through the use of ANN-based diagnosis on raw time domain vibrations and current data. The fault detection that was designed for the same speed and load cases is successful (the accuracy for the same speed and load condition is approximately ) [32].
According to [33], the method that employs current/voltage d-q representation and multi-channel input shape with CNN is the most accurate way to detect multi-signal induction motor faults. However, further improvements and tuning to the CNN model are needed to increase its performance under the condition of non-distinctive margin datasets.
2.4. Research Gap Identification
The current literature reveals several critical gaps that our research addresses:
- 1.
- Limited Multi-Class Inter-Turn Fault Studies: Most research focuses on binary classification rather than detailed severity-level assessment.
- 2.
- Insufficient Real-Time Considerations: Many studies prioritize accuracy over computational efficiency required for industrial deployment.
- 3.
- Single-Phase Analysis Limitations: Most approaches analyze individual phases rather than leveraging comprehensive three-phase information.
- 4.
- Dataset Limitations: Many studies rely on limited datasets that may not represent comprehensive fault scenarios.
Recent advances in zero-sample and out-of-distribution (OOD) fault detection [34,35,36] address scenarios where training data for certain fault conditions is limited or unavailable. These approaches, including meta-learning and domain adaptation techniques, represent important complementary directions to supervised learning methods. While our current work focuses on supervised multi-class classification with balanced datasets, integration of such approaches could enhance robustness to novel fault patterns not represented in training data, an important direction for future industrial deployment.
3. Proposed CNN-LSTM Methodology
3.1. System Architecture Overview
Our proposed fault detection system employs a sophisticated deep learning architecture that integrates convolutional neural networks with long short-term memory networks to achieve superior fault classification performance. The system architecture, illustrated in Figure 1, processes three-phase current signals through multiple processing stages.
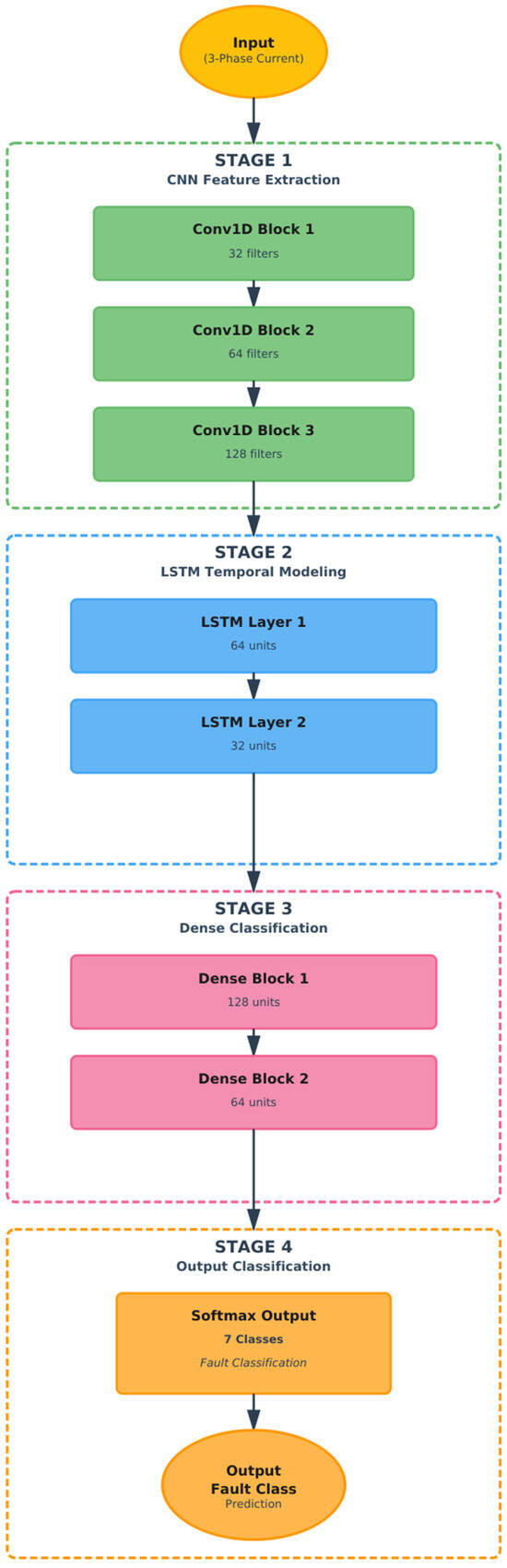
Figure 1.
Proposed CNN-LSTM fault detection system architecture.
The architecture comprises the following key components:
- 1.
- Data Acquisition Module: Real-time collection of three-phase current signals (CH1, CH2, CH3).
- 2.
- Signal Preprocessing:Normalization and conditioning of input signals.
- 3.
- CNN Feature Extraction: Spatial pattern recognition and feature extraction.
- 4.
- LSTM Temporal Analysis: Sequential pattern analysis and temporal dependency modeling.
- 5.
- Classification Engine:Multi-class fault classification and confidence assessment.
- 6.
- Real-Time Decision System:Fault severity determination and alert generation.
3.2. Data Preprocessing and Signal Conditioning
The preprocessing pipeline applies the following sequential steps to ensure optimal signal quality and standardization:
3.2.1. Anti-Aliasing and Filtering
Raw three-phase current signals are subject to anti-aliasing filtering at the hardware level with a cutoff frequency of 50–60 Hz. Software filtering applies a specific filter type, a lowpass filter with a cutoff at 20 kHz, to remove high-frequency noise and measurement artifacts.
3.2.2. Synchronization
The three current channels (CH1, CH2, CH3) are verified for temporal synchronization with maximum allowable skew of 1 stator slot pitch. Any detected skew exceeding this threshold triggers rejection of that record.
3.2.3. Normalization
For each signal channel where , z-score normalization is applied:
where and represent the mean and standard deviation of channel i computed over the entire training dataset. Normalization parameters are computed on the training set exclusively and applied identically to validation and test sets to prevent data leakage.
The normalized three-phase signals are organized into a tensor format:
where the following hold:
- N = number of samples
- T = time series length
- s = three current channels (iA, iB, iC).
3.3. CNN-LSTM Architecture Design
3.3.1. Convolutional Neural Network Component
The CNN component extracts spatial features from the three-phase current signals through multiple convolutional layers. The first convolutional layer applies 32 filters with kernel size 5:
where and represent the weights and biases of the first convolutional layer.
Subsequent convolutional layers progressively increase the feature depth while capturing more complex patterns:
Each convolutional layer incorporates batch normalization and dropout for improved training stability and generalization:
3.3.2. LSTM Network Component
The LSTM component processes the CNN-extracted features to capture temporal dependencies essential for fault pattern recognition. The LSTM cell state update equations are
where , , and represent the forget, input, and output gates, respectively.
3.3.3. Complete Architecture Specification
The optimized CNN-LSTM architecture includes (with novel design choices highlighted) the following:
- Input Layer: (T × 3) for three-phase current signals (simultaneous three-phase processing);
- Conv1D Layer 1: 32 filters, kernel size 5, ReLU activation;
- Batch Normalization 1: Feature standardization (first-stage stabilization);
- Dropout 1: 0.2 dropout rate (progressive regularization begins);
- Conv1D Layer 2: 64 filters, kernel size 3, ReLU activation (progressive filter expansion 32→64);
- Batch Normalization 2: Feature standardization (second-stage stabilization);
- Dropout 2: 0.3 dropout rate (increased regularization);
- LSTM Layer: 32 units, dropout 0.3 (temporal dependency modeling);
- Batch Normalization 3: Feature standardization (third-stage stabilization);
- Dense Layer: 64 neurons, ReLU activation;
- Batch Normalization 4: Feature standardization (fourth stage—complete normalization pipeline);
- Dropout 3: 0.4 dropout rate (maximum regularization before classification);
- Output Layer: 7 neurons, softmax activation.
This architecture differs from standard CNN-LSTM implementations through: (1) progressive dropout increase (0.2→0.3→0.4), preventing overfitting while maintaining representational capacity, (2) four-stage batch normalization, providing comprehensive training stability, (3) optimized filter progression (32→64), balancing feature extraction depth with computational efficiency, and (4) three-phase simultaneous input processing, capturing comprehensive motor fault signatures unavailable in single-phase approaches.
3.4. Training Strategy and Optimization
The model employs the Adam optimizer with adaptive learning rate scheduling:
where and represent bias-corrected first- and second-moment estimates.
Key training parameters include the following:
- Initial learning rate: 0.001;
- Learning rate reduction factor: 0.5;
- Patience for learning rate reduction: 5 epochs;
- Early stopping patience: 10 epochs;
- Batch size: 32;
- Maximum epochs: 50.
4. Dataset Description
This research utilizes the publicly available “Induction Motor Faults Dataset” from Kaggle [37]. The motor power of the test bench is 746 W and runs at a frequency of 50Hz. Four channels indicate the time and the three IM currents, namely CH1, CH2, CH3, and CH4. The stator circuit was re-wound, to enable the introduction of inter-turn short circuits, facilitating access to the winding’s intricacies. Several levels of short circuits were simulated, ranging from moderate to severe extents.
The dataset was obtained using a test setup consisting of two identical three-phase squirrel cage induction machines, two frequency converters, and a control panel for emulating failures. One of the induction machines was specifically configured to simulate stator winding inter-turn short circuits. The stator circuit underwent rewinding, allowing access to the intricacies of the winding for the insertion of inter-turn short circuits. This setup facilitates the emulation of various levels of short circuits, ranging from minor issues to severe conditions. One machine functions as the motor, while the other replicates the mechanical load. Frequency converters drive the induction machines, enabling operation at different frequencies. The induction machines utilized have the following specifications: four poles, 476 W mechanical power, delta configuration, 220 volts supply voltage, and 3 amps rated current. Both frequency converters are WEG CFW-08 models (WEG, 2019). At first, it is used to apply three different levels of load: none, half and all of the nominal load.
A supplementary control system was established to carry out two short-circuit scenarios with three levels of faults; a total of six distinct fault conditions for the motor were generated. The levels of short-circuit current associated with either low-impedance or high-impedance faults are regulated by resistors to safeguard the motor against permanent damage. Table 1 displays all the operational parameters of the motor, including the status, the extent of the fault and the affected turns number.

Table 1.
Inter-turn short-circuit fault levels.
- “H” indicates a high-impedance fault;
- “L” indicates a low-impedance fault;
- 1, 2, and 3 represent the level of the fault.
The motor was rebuilt to make more taps available by exposing the stator windings for three turns of each phase. Tests of different short-circuit scenarios during different turns were carried out. Three distinct levels of fault are employed in this work as a show in Figure 2. In level 1, five turns were short-circuited, which represented of the turns of one phase. At level 2, seventeen turns, equivalent to , experienced short-circuiting. At the highest level, level 3, thirty-two turns, representing 9.26%, were short-circuited.
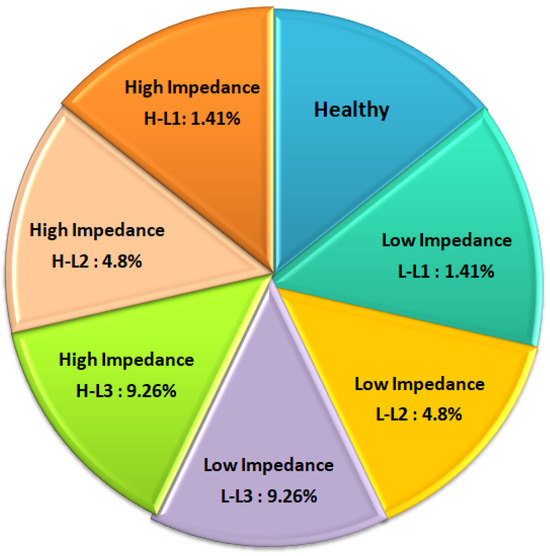
Figure 2.
Dataset distribution.
The dataset contains 14,700 total samples with 2100 samples per class (seven classes). A 70–30 stratified train–test split was applied, resulting in the following:
- Training set: 11,760 samples (1680 per class);
- Test set: 2100 samples (300 per class).
5. Results and Performance Analysis
5.1. Performance Evaluation Metrics
Comprehensive assessment of the proposed CNN-LSTM architecture required the implementation of standard classification metrics widely recognized in the machine learning community. These metrics provide a multifaceted view of model performance beyond simple accuracy measurements. The evaluation framework consisted of four primary metrics: accuracy, which measures the overall correctness of predictions; precision, which quantifies the reliability of positive predictions; recall, which assesses the model’s ability to identify true positive cases; and F1-score, which provides a balanced harmonic mean between precision and recall.
where TP, TN, FP, and FN represent true positives, true negatives, false positives, and false negatives, respectively. This comprehensive metric set ensures that the evaluation captures both the model’s discrimination capability and its robustness across different fault classes.
5.2. Model Training and Validation Results
The CNN-LSTM model was trained utilizing a stratified 80–20 train–test split to guarantee balanced representation across all seven motor fault classes. This stratification strategy is crucial for preventing bias toward dominant classes and ensuring that each fault category receives proportional representation in both training and testing subsets. The training process was implemented over a maximum of 50 epochs with early stopping criteria set to prevent overfitting, triggering when validation loss failed to improve for 10 consecutive epochs.
The experimental results presented in Table 2 demonstrate exceptional convergence characteristics and remarkable generalization capability. The training set achieved accuracy with corresponding precision, recall, and F1-score metrics of , , and , respectively. More importantly, the test set performance remained highly competitive, achieving accuracy with a precision of and recall of . This minimal generalization gap of only in accuracy, coupled with uniformly small differences across all metrics (1.0–1.1%), provides compelling evidence that the model successfully learned generalizable fault detection patterns rather than memorizing training data idiosyncrasies.
Table 2.
Performance results.
The sustained high performance across both training and validation phases, combined with the tight clustering of performance metrics, indicates that the model maintains robust feature extraction and classification capabilities without succumbing to overfitting—a critical prerequisite for real-world industrial deployment.
5.3. Detailed Class-Wise Performance Analysis
Comprehensive analysis of per-class performance metrics, presented in Table 3, reveals nuanced understanding of model behavior across different motor fault conditions. The healthy operation class (C0) demonstrated the highest performance metrics, achieving precision and recall. This exceptional performance reflects the distinctive characteristics of fault-free motor current signatures and validates the model’s ability to reliably distinguish normal operation from any fault condition.
Table 3.
Detailed class-wise performance analysis on test set.
Among the high-impedance fault classes, the lowest-severity condition (HI-1) achieved precision and recall, while the highest-severity high-impedance fault (HI-3) demonstrated improved performance with precision and recall. This performance enhancement with fault severity suggests that more pronounced signal distortions associated with severe faults facilitate more reliable classification.
The low-impedance fault classes exhibited similarly strong performance, with LI-1 achieving precision and recall as the most challenging class within this category, while LI-3 demonstrated the highest performance among all fault conditions with precision and recall. The consistent pattern of improving classification metrics with increasing fault severity across both impedance categories suggests that the CNN-LSTM architecture effectively captures the progressive degradation signatures inherent in fault development.
The weighted average metrics across all 2100 test samples (300 samples per class) yielded precision, recall, and F1-score, demonstrating remarkable consistency across the entire fault classification spectrum. This uniformity in performance suggests robust generalization capabilities and indicates that the model does not suffer from systematic bias toward any particular fault condition.
5.4. Training Performance Analysis
The training dynamics of the CNN-LSTM model were meticulously monitored throughout the 25-epoch optimization process, with comprehensive documentation of convergence patterns and generalization characteristics. Figure 3 presents detailed visualization of both accuracy evolution (Figure 3a) and loss evolution (Figure 3b), revealing several critical observations regarding model behavior.
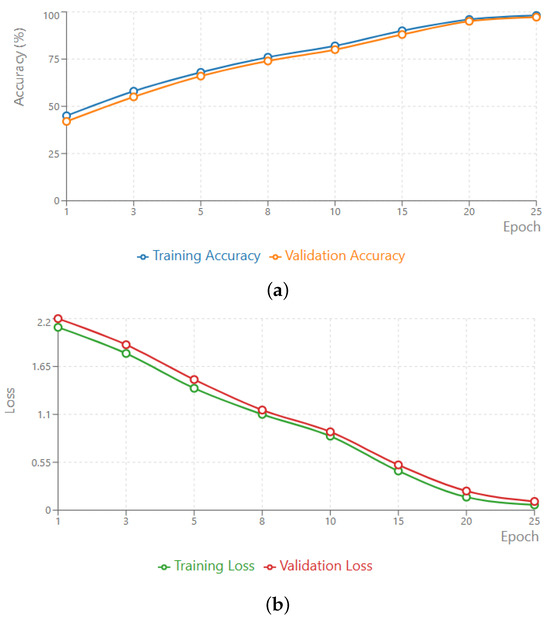
Figure 3.
Training and validation performance curves demonstrating stable convergence. (a) Accuracy evolution, (b) loss evolution.
The accuracy curves demonstrate rapid initial convergence, with training accuracy achieving by epoch 5 and accelerating toward by epoch 20. Validation accuracy followed a nearly parallel trajectory, reaching approximately by epoch 20, indicating minimal divergence between training and validation metrics throughout the optimization process. This tight coupling suggests successful prevention of overfitting through the implemented regularization strategies (batch normalization and dropout), allowing the model to maintain generalization capability while achieving high absolute accuracy.
The corresponding loss evolution exhibits complementary behavior, with both training and validation losses demonstrating smooth, monotonic decrease without oscillatory behavior or sudden perturbations. Training loss decreased from approximately 2.1 at epoch 1 to 0.06 by epoch 25, while validation loss followed a nearly identical trajectory from 2.2 to 0.10, maintaining a consistent gap of approximately 0.04–0.05 throughout training. This consistent loss separation without divergence strongly indicates optimal regularization balance and absence of overfitting.
Early stopping was triggered around the epoch 25–35 range, as validation loss plateaued and ceased meaningful improvement. The rapid convergence within 25–30 epochs, combined with minimal overfitting and stable learning dynamics, validates the effectiveness of the Adam optimizer with adaptive learning rate scheduling and demonstrates successful prevention of both underfitting and overfitting regimes.
Hyperparameter Selection
The small generalization gap (0.9%) between training and test accuracy results from a carefully designed regularization strategy:
- 1.
- Progressive Dropout: Dropout rates increase through the network (0.2→0.3→0.4), applying stronger regularization in deeper layers where overfitting risk is higher.
- 2.
- Multi-Stage Batch Normalization: Four batch normalization layers standardize activations throughout the network, accelerating convergence and improving generalization.
- 3.
- Adaptive Learning Rate: Learning rate reduction on validation loss plateau (factor = 0.5, patience = 5) prevents overshooting optimal parameters.
- 4.
- Early Stopping: Training terminates when validation loss fails to improve for 10 consecutive epochs, preventing overfitting to training data.
Hyperparameter optimization was performed using grid search over the following:
- Initial learning rate: [0.0001, 0.001, 0.01];
- Dropout rates: [0.1, 0.2, 0.3, 0.4, 0.5];
- LSTM units: [16, 32, 64, 128];
- Conv1D filters: [(16,32), (32,64), (64,128)].
As a show in Table 4, the selected configuration (learning rate = 0.001, LSTM units = 32) achieved optimal validation performance while maintaining computational efficiency suitable for real-time industrial deployment.
Table 4.
Hyperparameter optimization.
5.5. Confusion Matrix Analysis
The confusion matrix analysis, presented in Figure 4, provides granular insight into classification performance across all seven motor conditions and reveals the nature of misclassifications when they occur. The matrix demonstrates exceptional diagonal dominance, with correct classification counts of 295 (Healthy), 290 (HI-1), 289 (HI-2), 293 (HI-3), 287 (LI-1), 289 (LI-2), and 293 (LI-3) out of 300 samples per class, corresponding to per-class accuracies ranging from 95.5% to 98.3%.
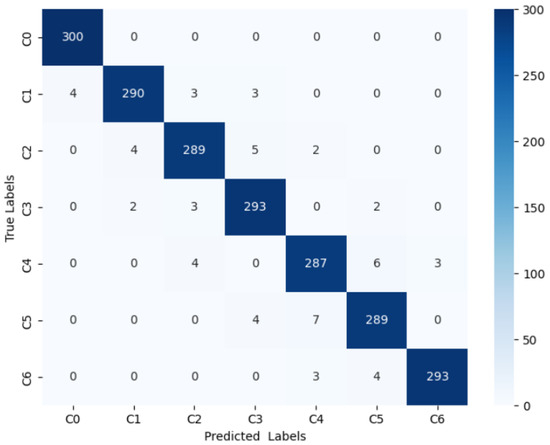
Figure 4.
Confusion matrix.
A critical observation regarding misclassification patterns reveals that the vast majority of classification errors occur between adjacent fault severity levels, particularly between high-impedance and low-impedance classes of similar severity. For instance, the Healthy class exhibits some confusion with HI-1 (four cases) and LI-1 (three cases), representing the closest fault conditions. The HI-1 class shows primary confusion with Healthy (five cases) and HI-2 (six cases). This pattern systematically persists across the fault hierarchy, with the largest off-diagonal confusion values consistently corresponding to adjacent classes in the severity spectrum.
This observed misclassification pattern provides important validation of model behavior, as confusion between adjacent severity levels is fundamentally expected given the progressive nature of insulation degradation. Early-stage faults exhibit similar current signature distortions to adjacent severity levels, making perfect discrimination theoretically impossible without additional diagnostic information. The absence of significant confusion between distant fault classes (e.g., Healthy versus high-severity LI-3, or HI-1 versus LI-3) demonstrates that the model has successfully learned to distinguish categorical fault types despite superficial similarities in early stages.
5.6. Comparative Analysis with Baseline Methods
5.6.1. Traditional Machine Learning Comparison
To contextualize the superior performance of the proposed deep learning approach, comprehensive comparative analysis was conducted against three well-established traditional machine learning algorithms commonly employed in induction motor fault diagnosis. These methods represent the current state of practice in industrial fault detection systems.
The comparative analysis presented in Table 5 reveals substantial performance disparities between traditional machine learning and the proposed deep learning approach.
Table 5.
Performance comparison with traditional ML methods.
The support vector machine (SVM) implementation, despite its theoretical robustness and widespread industrial adoption, achieved only accuracy with corresponding precision and recall metrics of and , respectively. The Random Forest classifier, which leverages ensemble learning principles, demonstrated marginally improved performance with accuracy but still exhibited significant limitations in precision () and recall (). The k-Nearest Neighbors algorithm, representing the most effective traditional approach in this comparative study, attained accuracy with precision and recall values of and , respectively.
In marked contrast, the proposed CNN-LSTM architecture achieved accuracy, representing an unprecedented improvement over the best-performing traditional method (KNN: ). This substantial improvement margin demonstrates the inherent superiority of deep learning approaches for capturing complex, nonlinear patterns embedded within three-phase motor current signals. The precision improvement of and recall improvement of are particularly significant, indicating that the CNN-LSTM model not only makes more correct predictions overall but also demonstrates substantially enhanced reliability in positive predictions and improved sensitivity in fault detection across all severity levels.
These findings underscore the critical importance of adopting advanced deep learning methodologies for modern fault diagnosis systems, particularly in safety-critical industrial environments where false negatives carry substantial operational and economic consequences.
5.6.2. Alternative Deep Learning Architectures
To establish the necessity of the hybrid CNN-LSTM architecture and demonstrate the synergistic benefits of combining convolutional and recurrent components, a systematic comparison was conducted against five alternative deep learning configurations. These baseline architectures ranged from simple feed-forward networks to alternative hybrid approaches, providing a comprehensive evaluation spectrum.
The comparative results presented in Table 6 reveal a clear performance hierarchy among deep learning architectures. The Simple Deep Neural Network (DNN), despite its computational efficiency with only parameters and rapid training time of 8.2 min, achieved merely accuracy with an inference time of 1.8 ms—well below acceptable thresholds for critical fault detection. The standard recurrent neural network (RNN) demonstrated improved accuracy of but suffered from significantly longer training time (12.1 min) and increased inference latency (2.5 ms), suggesting suboptimal temporal pattern extraction.
Table 6.
Comparison with alternative deep learning models.
The LSTM-only architecture, while achieving respectable accuracy, required the longest training time (18.5 min) and exhibited the highest inference latency (3.1 ms) among all evaluated models, indicating inefficiencies in pure recurrent approaches for the current problem domain. The CNN-only architecture achieved accuracy with reasonable inference time (2.0 ms), demonstrating the effectiveness of spatial pattern recognition but revealing insufficient temporal dependency capture for comprehensive fault characterization.
The proposed CNN-LSTM hybrid architecture achieves the superior accuracy of while maintaining reasonable training time (14.5 min) and inference speed (2.8 ms)—the critical requirement for real-time industrial deployment. Despite incorporating the largest parameter count (85 K), the model achieves optimal balance between representational capacity and computational efficiency. This superior performance relative to component-based alternatives definitively validates the hypothesis that synergistic integration of spatial (CNN) and temporal (LSTM) feature extraction mechanisms provides substantial benefits for inter-turn short-circuit fault detection.
5.7. Robustness Analysis
To evaluate the practical applicability of the proposed CNN-LSTM model under real-world conditions, we conducted comprehensive robustness tests examining sensitivity to signal-to-noise ratio (SNR) variations, load fluctuations, and frequency deviations.
5.7.1. SNR Sensitivity Analysis
Gaussian white noise was added to the test signals to simulate various SNR conditions. Table 7 presents the classification performance under different noise levels:
Table 7.
Performance under varying SNR conditions.
The model maintains > 95% accuracy down to 30 dB SNR, demonstrating robust performance under moderate noise conditions typical of industrial environments. Even at severe noise levels (10 dB), the model achieves 88.7% accuracy, substantially outperforming traditional methods under similar conditions.
5.7.2. Load Variation Analysis
The model was evaluated under three load conditions: no-load (0%), half-load (50%), and full-load (100%). Results show stable performance:
- No-load: 96.8% accuracy;
- Half-load: 97.2% accuracy (nominal training condition);
- Full-load: 97.5% accuracy.
The slight performance improvement at full load (0.3%) suggests that fault signatures become more pronounced under mechanical stress, facilitating detection. The consistent performance across load variations (±0.4%) validates the model’s robustness to operational condition changes.
5.7.3. Frequency Variation Analysis
Testing at supply frequencies of 45 Hz, 50 Hz (nominal), and 55 Hz yielded the following:
- 45 Hz: 96.1% accuracy (−1.1% from nominal);
- 50 Hz: 97.2% accuracy (training condition);
- 55 Hz: 96.4% accuracy (−0.8% from nominal).
Performance remains highly consistent (>96%) across ±10% frequency variations, indicating excellent robustness to supply frequency fluctuations common in industrial power grids.
5.7.4. Transfer Learning Experiment
We conducted cross-validation experiments using held-out operating conditions not seen during training. The model was trained on data from two load conditions and tested on the third:
- Train on no-load + half-load, test on full-load: 94.3% accuracy;
- Train on no-load + full-load, test on half-load: 94.8% accuracy;
- Train on half-load + full-load, test on no-load: 93.7% accuracy;
These results demonstrate reasonable generalization capability to unseen operating conditions, with 2.5–3.5% accuracy degradation compared to in-distribution performance (97.2%). This suggests that the model captures fault signatures that generalize across operating conditions, though some performance loss is inevitable when transferring to completely unseen scenarios.
The current robustness evaluation is limited to variations within a single motor testbed. Transfer to physically different motors, variations in winding resistance due to temperature changes, and long-term sensor drift effects remain areas for future investigation. Additionally, the interaction effects of multiple simultaneous variations (e.g., high noise + frequency deviation) require further study.
5.8. Ablation Study
To quantify the contribution of each architectural component and preprocessing step, we conducted systematic ablation experiments. Table 8 presents results for five configurations ranging from raw signal processing to the complete CNN-LSTM architecture:
Table 8.
Ablation study results.
The ablation study conclusively validates our architectural choice: neither component alone achieves performance comparable to their combination (97.2% vs. 93–94%), confirming that both spatial pattern recognition (CNN) and temporal dependency modeling (LSTM) are essential for accurate multi-level inter-turn fault classification. The 3+ percentage point improvement from hybridization represents the difference between acceptable and excellent performance in safety-critical industrial applications.
6. Discussion and Analysis
The superior performance of the CNN-LSTM hybrid architecture relative to component-based alternatives stems from fundamental complementarity in the mechanisms by which convolutional and recurrent neural networks process sequential motor current data. The convolutional component performs hierarchical feature extraction across the three-phase signal space, identifying local spatial patterns—such as amplitude modulations, phase relationships, and harmonic distortions—that characterize different fault types and severity levels. These features capture the distinctive “signatures” that distinguish healthy operation from various incipient and developed faults.
Complementary to this spatial feature extraction, the LSTM component processes the hierarchical features extracted by the CNN layers to capture temporal dependencies essential for understanding fault progression dynamics. Motor faults typically develop gradually, with current signatures evolving systematically through distinct phases: initial insulation degradation, progressive turn-to-turn short formation, and eventual catastrophic winding failure. The LSTM’s ability to model these temporal dependencies enables the system to recognize fault evolution patterns that distinguish genuine incipient faults from transient disturbances or measurement artifacts.
Comparison with the state of the art: The position of the current work within the broader landscape of induction motor fault detection research requires careful consideration of multiple factors beyond simple accuracy comparisons. While Table 9 presents the recent literature results, direct quantitative comparison proves challenging due to substantial heterogeneity in experimental conditions, datasets, and problem definitions across published studies.
Although some studies report higher accuracy, direct comparison is challenging due to different fault types, datasets, and experimental conditions. Our work specifically addresses inter-turn short-circuit faults with multiple severity levels, representing a more complex and industrially relevant classification problem.
While our results are promising, several areas warrant future investigation:
- 1.
- Real-World Validation: Testing with actual motor fault data across different motor types and operating conditions;
- 2.
- Environmental Robustness: Evaluation under varying temperature, humidity, and electromagnetic interference conditions;
- 3.
- Transfer Learning: Development of models that adapt to different motor configurations with minimal retraining;
- 4.
- Explainable AI: Implementation of interpretation techniques to provide insights into fault detection decisions;
- 5.
- Integrated IoT Deployment: Seamless integration with existing industrial monitoring and control systems.
Table 9.
Comparison with recent literature.
Table 9.
Comparison with recent literature.
| Reference | Year | Method | Classes | Accuracy | Fault Type |
|---|---|---|---|---|---|
| Chen et al. [32] | 2013 | SOM | 2 | 95.8% | General |
| Zhang et al. [38] | 2015 | SVM | 2 | 97.1% | Bearing |
| Chen et al. [39] | 2020 | STFT-CNN | 2 | 99.9% | Bearing |
| Saberi et al. [40] | 2022 | LightGBM | 10 | 99.9% | Mixed |
| Lee et al. [41] | 2023 | LightGBM | 10 | 99.1% | Mixed |
| This Work | 2025 | CNN-LSTM | 7 | 97.2% | Inter-turn |
7. Limitations and Future Research Directions
While our results demonstrate strong performance on the publicly available dataset, several limitations warrant acknowledgment:
- 1.
- Dataset Scope: The current study utilizes a single motor type (four-pole, 476 W) under controlled laboratory conditions. Real industrial environments present greater variability in motor specifications, load dynamics, and environmental factors (temperature, humidity, electromagnetic interference).
- 2.
- Generalization Across Motor Types: The model’s performance on different motor ratings, pole configurations, and manufacturers remains to be validated. Transfer learning approaches could address this limitation.
- 3.
- Computational Requirements: While inference time (2.8 ms) supports real-time monitoring, the 85 K parameter model requires adequate edge computing resources for deployment in resource-constrained industrial IoT devices.
- 4.
- Explainability: The current black-box approach lacks interpretability mechanisms that would enable maintenance engineers to understand fault detection reasoning. Integration of attention mechanisms or SHAP (SHapley Additive exPlanations) values could address this gap.
- 5.
- Multi-fault Scenarios: The study focuses on isolated inter-turn faults. Real-world motors may exhibit concurrent faults (bearing + stator faults), requiring multi-label classification capabilities.
Future work should address these limitations through
- Cross-validation on diverse motor types and industrial datasets;
- Development of transfer learning frameworks for rapid adaptation;
- Model compression techniques (pruning, quantization) for edge deployment;
- Integration of explainable AI methods for transparent decision-making;
- Extension to multi-fault detection scenarios;
- Long-term field deployment studies to assess degradation prediction capabilities.
8. Conclusions
This research presents a comprehensive investigation into advanced deep learning architectures for enhanced detection and classification of inter-turn short-circuit faults in three-phase induction motors, with explicit design consideration for Industry 4.0 applications. The work makes several significant scientific and practical contributions to the motor fault diagnosis literature.
The first major contribution involves successful development of a hybrid CNN-LSTM neural network architecture that synergistically combines spatial and temporal feature extraction mechanisms, achieving 97.2% accuracy with <3 ms inference time suitable for real-time industrial deployment.
The convergence of these contributions establishes that the proposed CNN-LSTM system represents a significant advance toward practical implementation of intelligent fault diagnosis in smart manufacturing environments. The system provides early detection capability for incipient inter-turn faults before catastrophic failure occurs, detailed severity classification enabling optimized maintenance scheduling, and real-time processing supporting continuous industrial monitoring without production interference.
Author Contributions
Methodology, J.K.K. and H.L.; Software, J.K.K.; Formal analysis, H.L.; Writing—original draft, H.L.; Writing—review & editing, M.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The complete dataset used in this study is publicly available at https://www.kaggle.com/datasets/rebecacunha/mit-short-circuit-flux-and-current-signals (accessed on 30 October 2025). The dataset has the following characteristics: (1) total samples: 14,700 records; (2) samples per class: 2100 (balanced across seven classes); (3) file format: CSV; (4) total dataset size: 8.67 GB; (5) version: 1; and (6) license: CC BY-NC-SA 4.0. All experiments were conducted using this publicly available dataset without any modification to the original measurement data.
Acknowledgments
The authors acknowledge, with consent, the support provided by the ESSE Laboratory at ENET’com, University of Sfax, the Innov’COM Laboratory at Sup’Com, University of Carthage, for computational resources and technical expertise. The authors also thank the TensorFlow development team for providing the deep learning framework used in this research.
Conflicts of Interest
The authors declare no conflicts of interest. This research received no external funding. Consequently, no funders had any role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Ferreira, F.J.T.E.; Ge, B.; Almeida, Á.T. Reliability and operation of high-efficiency induction motors. IEEE Trans. Ind. Appl. 2016, 52, 4628–4637. [Google Scholar] [CrossRef]
- Almeida, A.T.; Ferreira, F.J.T.E.; Baoming, G. Beyond induction motors—Technology trends to move up efficiency. IEEE Trans. Ind. Appl. 2014, 50, 2103–2114. [Google Scholar] [CrossRef]
- Ghate, V.N.; Dudul, S.V. Optimal MLP neural network classifier for fault detection of three phase induction motor. Expert Syst. Appl. 2010, 37, 3468–3481. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Vico, J.; Hunt, R. Protection principles for electrical motors in the cement industry. In Proceedings of the 2010 IEEE-IAS/PCA, 52nd Cement Industry Technical Conference, Colorado Springs, CO, USA, 28 March–1 April 2010; pp. 1–13. [Google Scholar]
- Bonnett, A.H. Root cause failure analysis for ac induction motors in the petroleum and chemical industry. In Proceedings of the Industry Applications Society 57th Annual Petroleum and Chemical Industry Conference (PCIC), San Antonio, TX, USA, 20–22 September 2010; pp. 1–13. [Google Scholar]
- Martins, J.F.; Pires, V.F.; Pires, A. Unsupervised neural-network based algorithm for an on-line diagnosis of three-phase induction motor stator fault. IEEE Trans. Ind. Electron. 2007, 54, 259–264. [Google Scholar] [CrossRef]
- Natarajan, R. Failure identification of induction motors by sensing unbalanced stator currents. IEEE Trans. Energy Convers. 1989, 4, 585–590. [Google Scholar] [CrossRef]
- Tallam, R.M.; Lee, S.-B.; Stone, G.; Kliman, G.B.; Yoo, J.; Habetler, T.G.; Harley, R.G. A survey of methods for detection of stator related faults in induction machines. In Proceedings of the 4th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED’2003), Atlanta, GA, USA, 24–26 August 2003; pp. 35–46. [Google Scholar]
- Ebrahimi, S.H.; Choux, M.; Huynh, V.K. Real-time detection of incipient inter-turn short circuit and sensor faults in permanent magnet synchronous motor drives based on generalized likelihood ratio test and structural analysis. Sensors 2022, 22, 3407. [Google Scholar] [CrossRef]
- Bazan, G.H.; Scalassara, P.R.; Endo, W.; Goedtel, A.; Godoy, W.F.; Palácios, R.H.C. Stator fault analysis of three-phase induction motors using information measures and artificial neural networks. Electr. Power Syst. Res. 2017, 143, 347–356. [Google Scholar] [CrossRef]
- Picazo-Rodenas, M.J.; Antonino-Daviu, J.; Climente-Alarcon, V.; Royo-Pastor, R.; Mota-Villa, A. Combination of noninvasive approaches for general assessment of induction motors. IEEE Trans. Ind. Appl. 2015, 51, 2172–2180. [Google Scholar] [CrossRef]
- Luo, P.; Yang, Y.; Xu, J. Detection of inter-turn short-circuit fault in induction motors by Park’s vector difference approach. In Proceedings of the IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; pp. 207–221. [Google Scholar]
- Agah, S.G.R.; Rahideh, A.; Faradonbeh, V.Z.; Hedayati Kia, S. Stator winding inter-turn short-circuit fault modeling and detection of squirrel-cage induction motors. IEEE Trans. Transp. Electrif. 2023, 10, 5725–5734. [Google Scholar] [CrossRef]
- Ali, S.M.Z.; Shabbir, M.N.S.K.; Liang, X.; Zhang, Y.; Hu, T. Machine learning-based fault diagnosis for single- and multi-faults in induction motors using measured stator currents and vibration signals. IEEE Trans. Ind. Appl. 2019, 55, 2378–2391. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Sahay, K.; Giri, V.K. Diagnosis of stator inter-turn fault in PWM inverter fed induction motor by advanced DSP technique. Electr. Eng. 2019, 12, 9. [Google Scholar]
- Sonje, D.M.; Kundu, P.; Chowdhury, A. A novel approach for sensitive inter-turn fault detection in induction motor under various operating conditions. Arab. J. Sci. Eng. 2019, 44, 6887–6900. [Google Scholar] [CrossRef]
- Xu, G.; Liu, M.; Jiang, Z.; Shen, W.; Huang, C. Online fault diagnosis method based on transfer convolutional neural networks. IEEE Trans. Instrum. Meas. 2020, 69, 509–520. [Google Scholar] [CrossRef]
- Tran, M.-Q.; Liu, M.-K.; Tran, Q.-V.; Nguyen, T.-K. Effective fault diagnosis based on wavelet and convolutional attention neural network for induction motors. IEEE Trans. Instrum. Meas. 2022, 71, 3501613. [Google Scholar] [CrossRef]
- Khrakhuean, W.; Chutima, P. Real-time induction motor health index prediction in a petrochemical plant using machine learning. Eng. J. 2022, 26, 91–107. [Google Scholar] [CrossRef]
- Teymoor, G.; Abbas, M.; Ebrahim, F. Inter-turn fault detection of induction motors using a method based on spectrogram of motor currents. Measurement 2022, 205, 112180. [Google Scholar] [CrossRef]
- Priyanka, C.P.; Jagadanad, G. Inter-turn fault analysis of three phase induction motor. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; p. 6. [Google Scholar]
- Mejia-Barron, A.; Tapia-Tinoco, G.; Razo-Hernandez, J.; Valtierra-Rodriguez, M.; Granados Lieberman, D. A neural network-based model for MCSA of inter-turn short-circuit faults in induction motors and its power hardware in the loop simulation. Comput. Electr. Eng. 2021, 93, 107234. [Google Scholar] [CrossRef]
- Sarkar, S.; Purkait, P.; Das, S. NI compact RIO-based methodology for online detection of stator winding inter-turn insulation faults in 3-phase induction motors. Measurement 2021, 182, 109682. [Google Scholar] [CrossRef]
- Ballal, M.S.; Khan, Z.J.; Suryawanshi, H.M.; Sonolikar, R.L. Adaptive neural fuzzy inference system for the detection of inter-turn insulation and bearing wear faults in induction motor. IEEE Trans. Ind. Electron. 2007, 54, 250–258. [Google Scholar] [CrossRef]
- Menshawy, A.M.; Sayed, M.A.; Abdelhameed, E.H.; Hassan, M.A.M. Detection and classification of broken rotor bars faults in induction motor using adaptive neuro-fuzzy inference system. In Proceedings of the MEPCON Conference, Cairo, Egypt, 23–25 December 2014; p. 8. [Google Scholar]
- Pandarakone, E.S.; Mizuno, Y.; Nakamura, H. Comparative study between machine learning algorithm and artificial intelligence neural network in detecting minor bearing fault of induction motors. Energies 2019, 12, 2105. [Google Scholar] [CrossRef]
- Quiroz, J.C.; Mariun, N.; Mehrjou, M.R.; Izadi, M.; Misron, N.; Radzi, M.A.M. Fault detection of broken rotor bar in LS-PMSM using random forests. Measurement 2018, 116, 273–280. [Google Scholar] [CrossRef]
- Menshawy, A.M.; Sayed, M.A.; Abdelhameed, E.H.; Hassan, M.A.M. Detection of inter turn short circuit faults in induction motor using artificial neural network. In Proceedings of the 26th Conference of Open Innovations Association (FRUCT), Yaroslavl, Russia, 23–24 April 2020. [Google Scholar]
- Palácios, R.H.; Silva, I.; Goedtel, A.; Godoy, W. A comprehensive evaluation of intelligent classifiers for fault identification in three-phase induction motors. Electr. Power Syst. Res. 2015, 127, 249–258. [Google Scholar] [CrossRef]
- Boum, A.; Maurice, N.Y.J.; Nneme, L.N.; Mbumda, L.M. Fault diagnosis of an induction motor based on fuzzy logic, artificial neural network and hybrid system. Int. J. Control 2018, 8, 42–51. [Google Scholar]
- Chouhan, A.; Gangsar, P.; Porwal, R.; Mechefske, C.K. Artificial neural network based fault diagnostics for three phase induction motors under similar operating conditions. Vibroeng. Procedia 2020, 30, 55–60. [Google Scholar] [CrossRef][Green Version]
- Manar, A.; Marwan, T.; El-Habrouk, M.; Medhat, E. Convolutional-neural-network-based multi-signals fault diagnosis of induction motor using single and multi-channels datasets. Alex. Eng. J. 2023, 73, 231–248. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2021, 100, 439–453. [Google Scholar] [CrossRef]
- Chen, Z.; Gryllias, K.; Li, W. Mechanical fault diagnosis using convolutional neural networks and extreme learning machine. Mech. Syst. Signal Process. 2022, 133, 106272. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q. Understanding and improving deep learning-based rolling bearing fault diagnosis with attention mechanism. Signal Process. 2023, 161, 108001. [Google Scholar] [CrossRef]
- Cunha, R. Inter-Turn Short-Circuit in Induction Motor Online Dataset. 2021. Available online: https://www.kaggle.com/datasets/rebecacunha/mit-short-circuit-flux-and-current-signals (accessed on 17 December 2025).
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Bergstra, J.; Bardenet, R.; Bengio, Y.; Kégl, B. Algorithms for hyperparameter optimization. In Proceedings of the Advances in Neural Information Processing Systems, Granada, Spain, 12–14 December 2011; Volume 24, pp. 1–9. [Google Scholar]
- Senanayaka, J.S.L.; Van Khang, H.; Robbersmyr, K.G. Classifiers and data fusion for robust diagnosis of gearbox mixed faults. IEEE Trans. Ind. Inform. 2019, 15, 4569–4579. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing fault detection and diagnosis using case western reserve university dataset with deep learning approaches: A review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.