


Research on Variable Transmission Ratio Control Method to Improve Vehicle Handling Comfort Based on Steer-by-Wire System

Abstract
1. Introduction
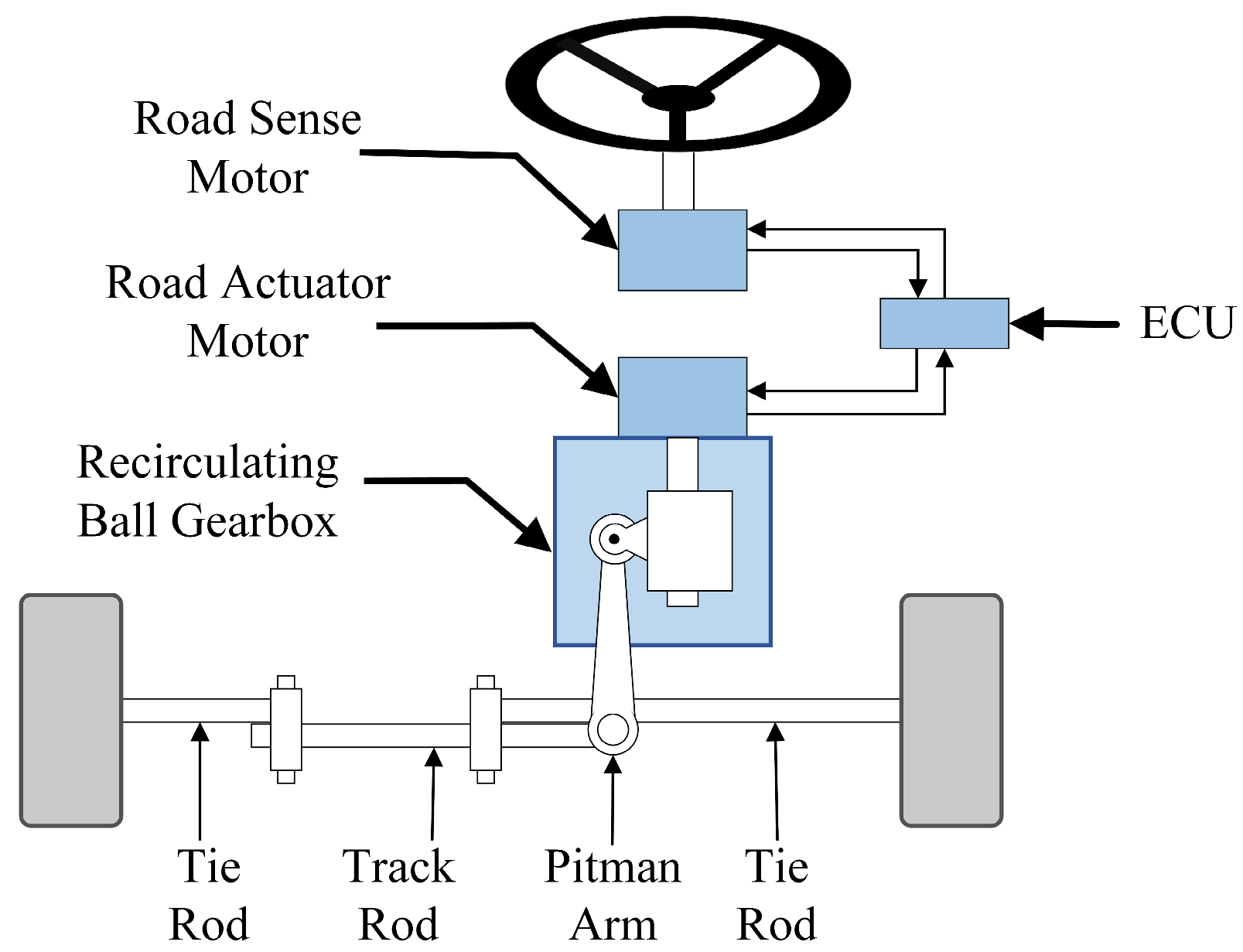
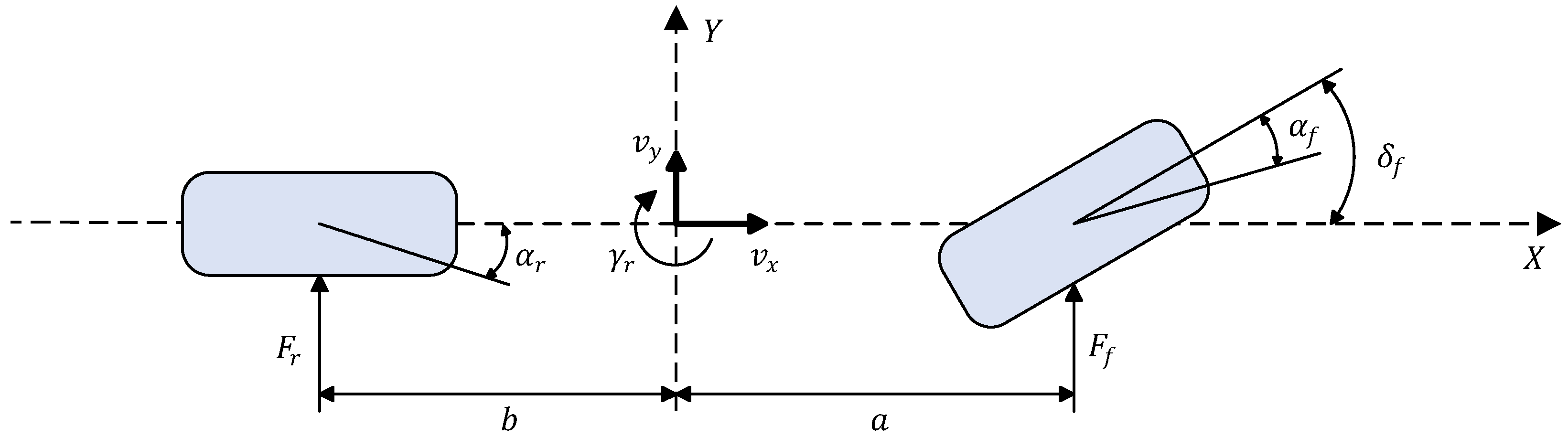
2. Vehicle Simulation System
3. Variable Steering Ratio Design
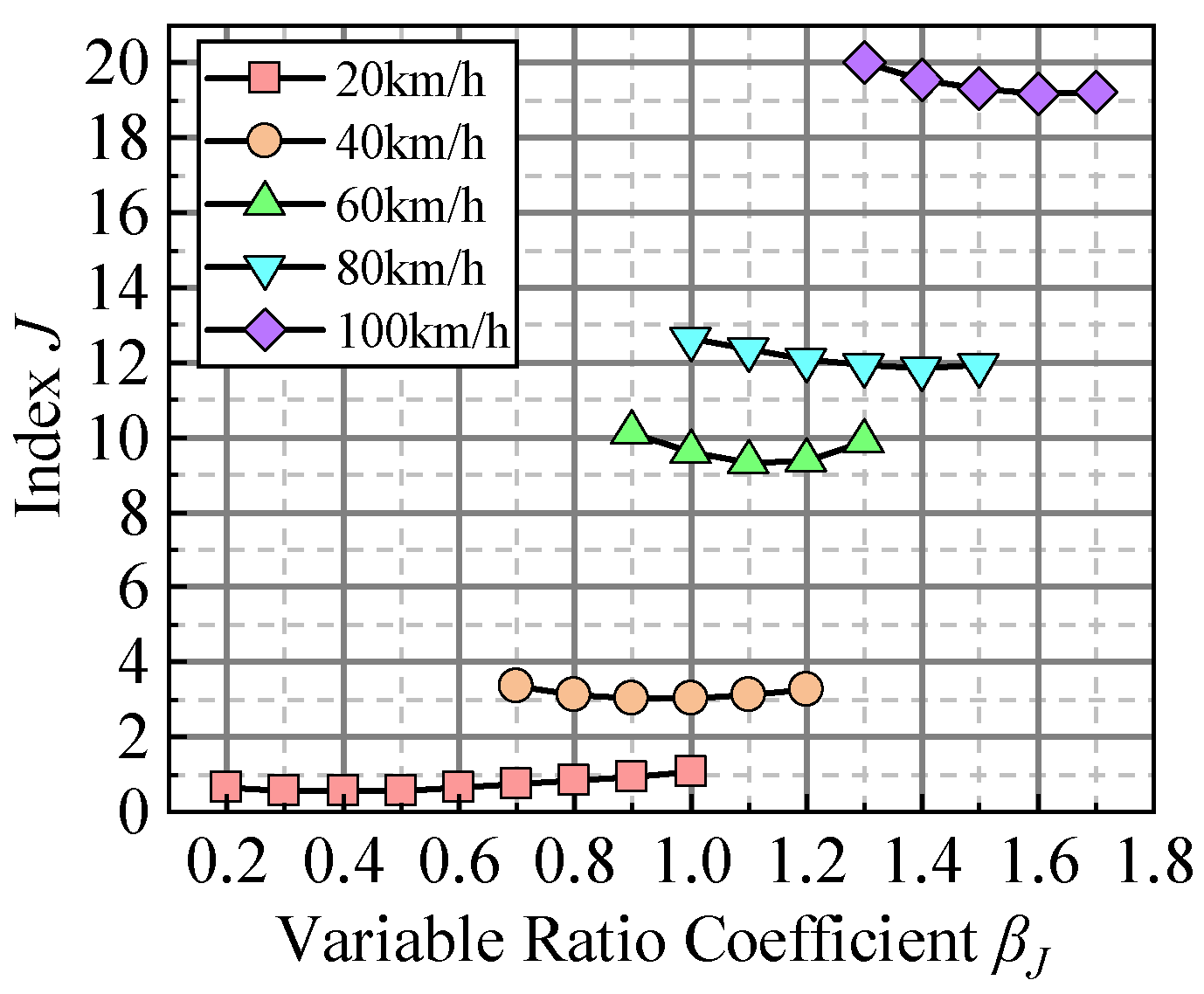
3.1. Based on the Evaluation Indicators for Vehicle Handling Stability
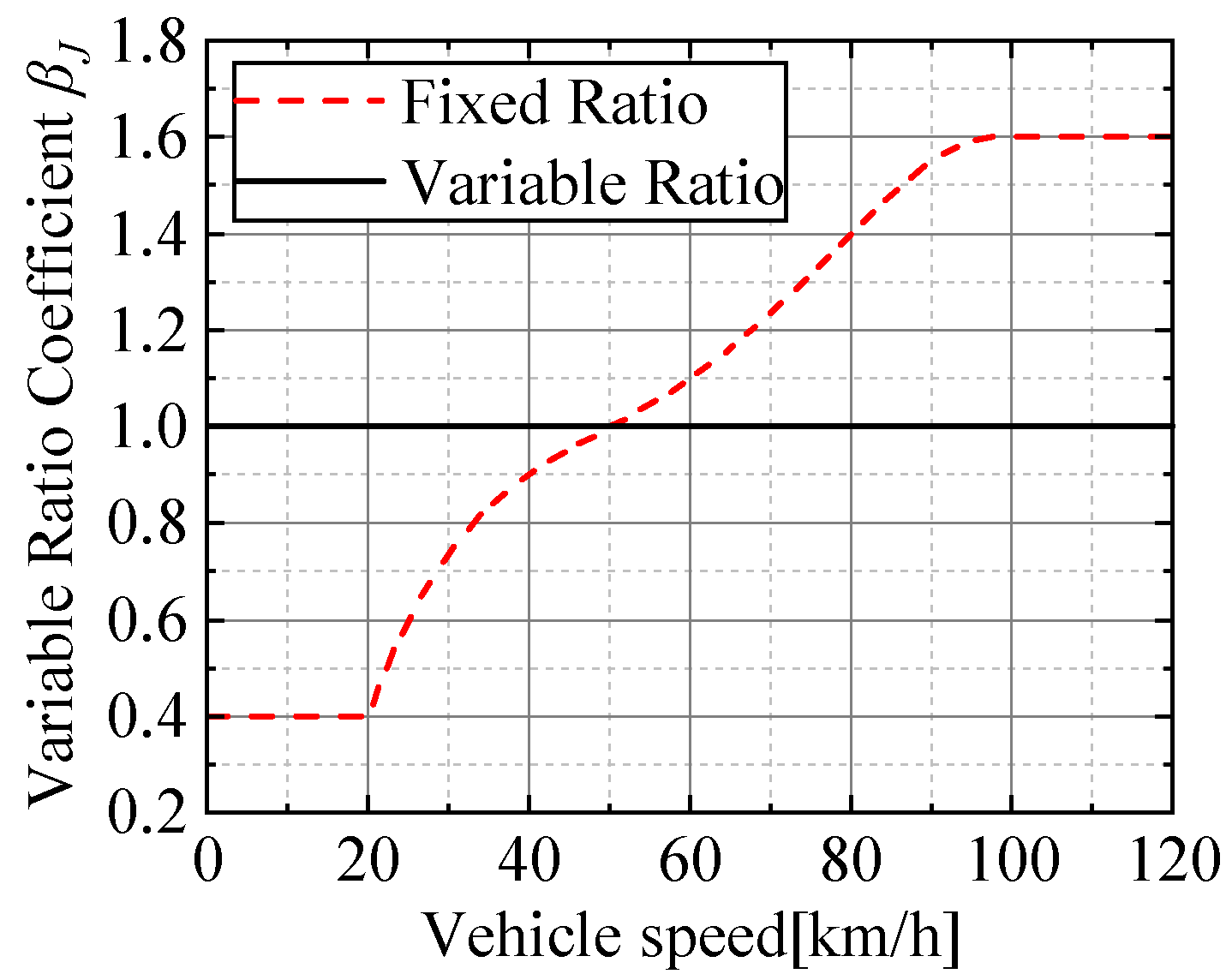
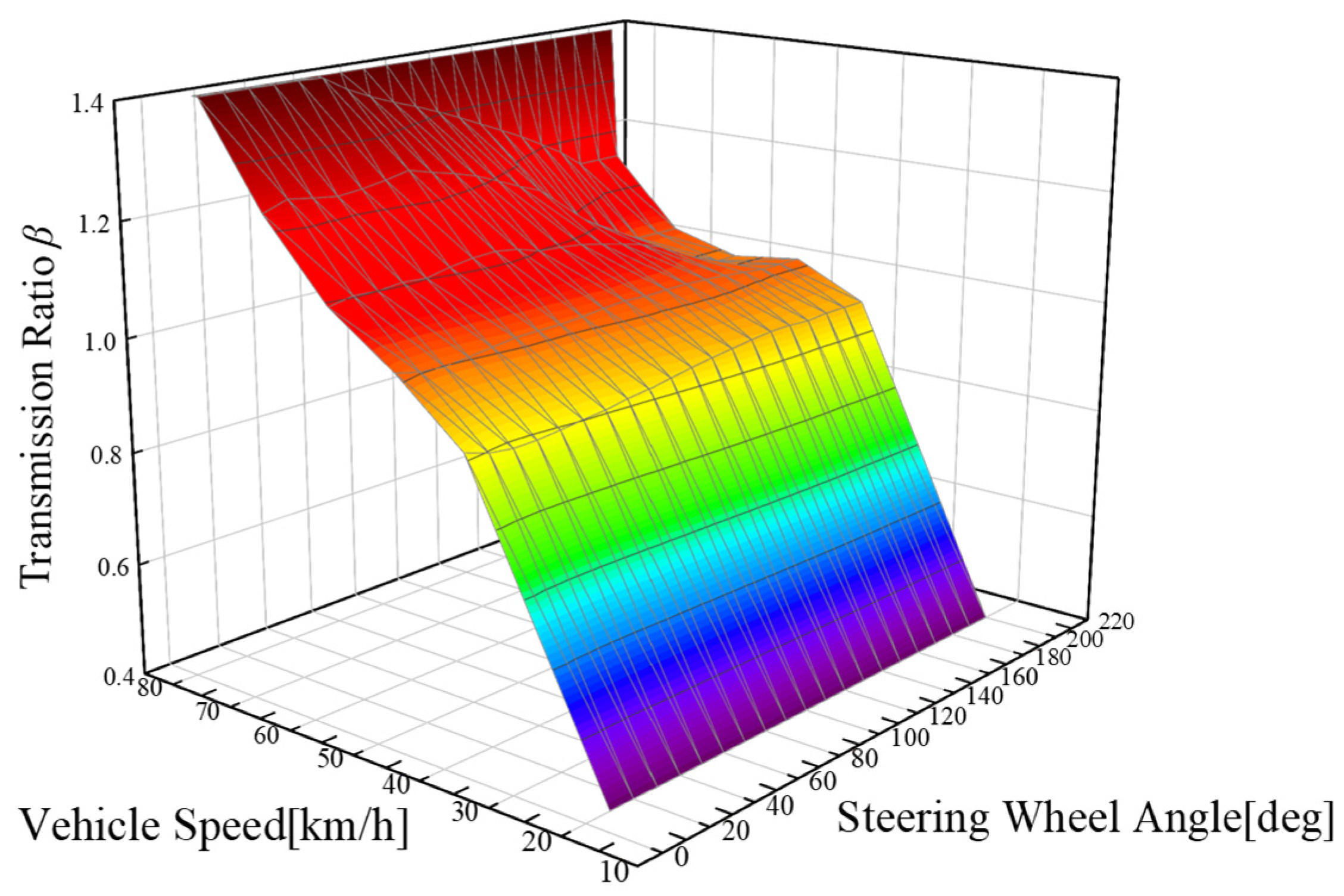
3.2. Based on the Vehicle Steering Gain
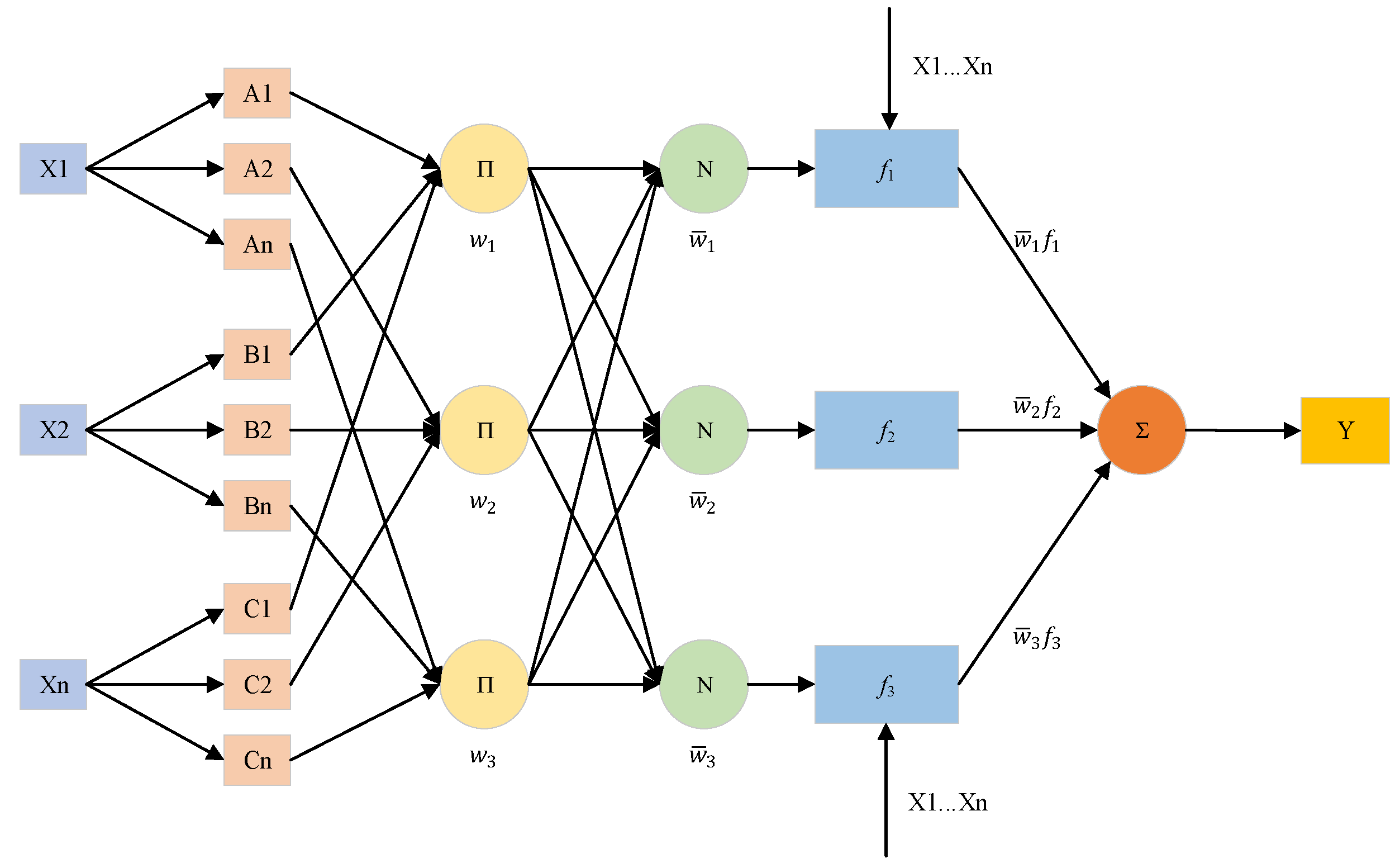
3.3. Fuzzy Neural Network Controller
4. Simulation and Analysis
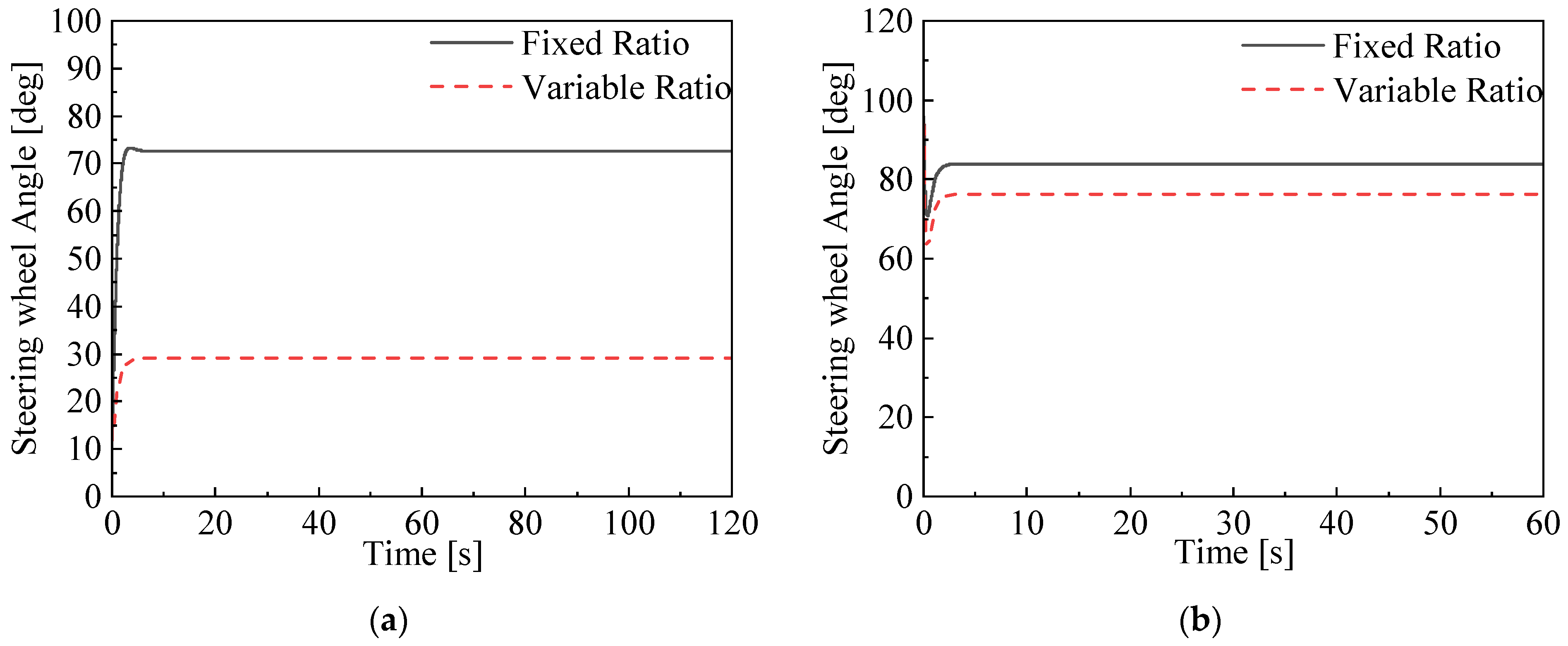
4.1. Steady-State Circle Test
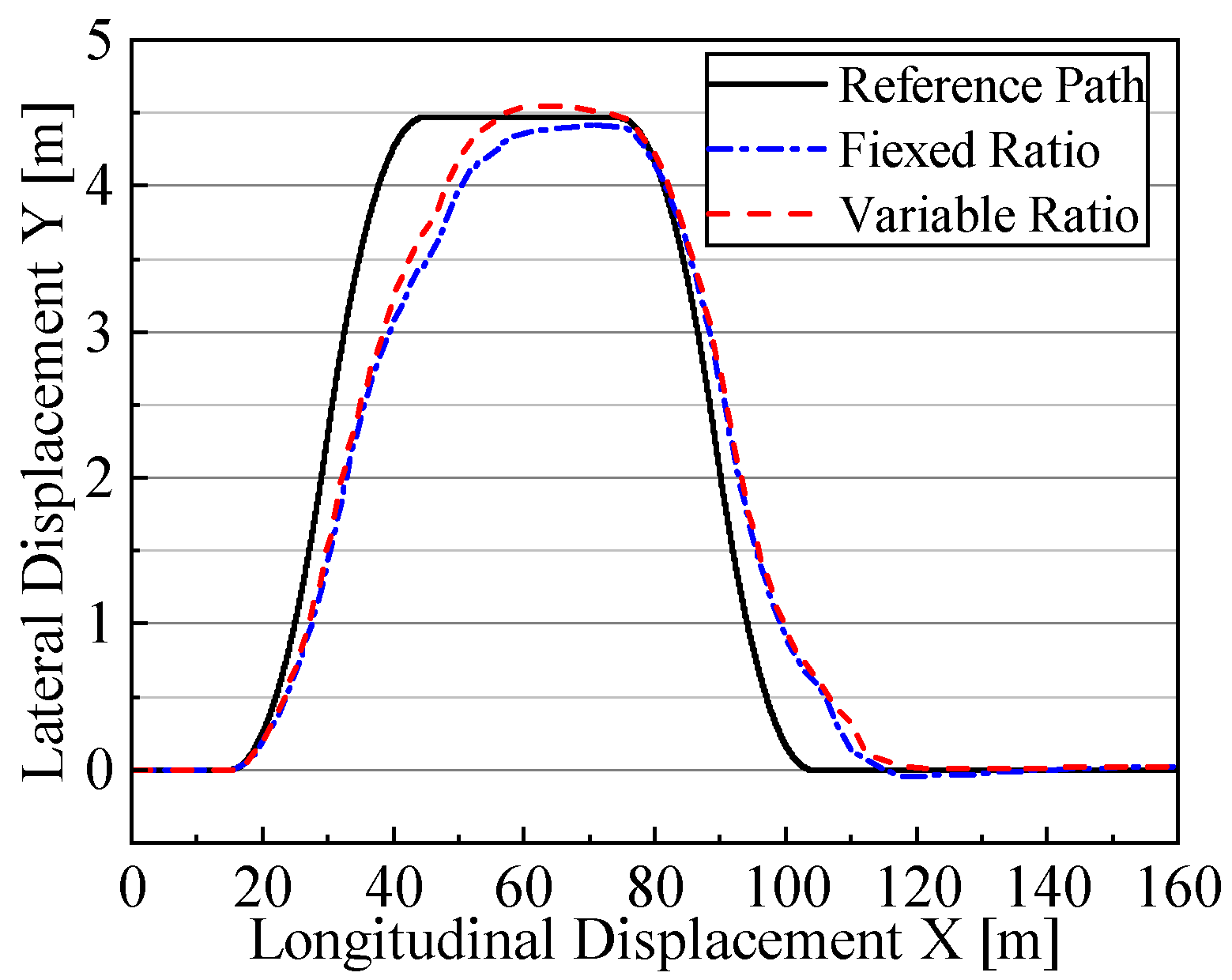
4.2. Double Lane-Change Test
4.3. Angular Step Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, J.; Lou, J.; Jiang, X. Overview of intelligent vehicle core technology and development. IOP Conf. Ser. Earth Environ. Sci. 2021, 769, 042054. [Google Scholar] [CrossRef]
- Jiangxue, C.; Manjiang, L.; Xuefeng, B. The Development of Engineering Vehicles Steer—By-Wire System. In Proceedings of the 3rd International Conference on Material, Mechanical and Manufacturing Engineering, Guangzhou, China, 27–28 June 2015; pp. 1763–1766. [Google Scholar]
- Shao, W.; Liang, X.; Fang, T.; Zhao, L.; Hu, Y. Active steering stability control of steer-by-wire vehicles based on variable horizon-robust model predictive control. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 410. [Google Scholar] [CrossRef]
- Wei, H.; Wang, J.; Jian, M.; Mei, S.; Huang, M. Steer-by-Wire Control System Based on Carsim and Simulink. In Proceedings of the 2021 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 21–24 April 2021; pp. 1–5. [Google Scholar]
- Cho, J.; Huh, K. Active Front Steering for Driver’s Steering Comfort and Vehicle Driving Stability. Int. J. Automot. Technol. 2019, 20, 589–596. [Google Scholar] [CrossRef]
- Husain, S.S.; Al-Dujaili, A.Q.; Jaber, A.A.; Humaidi, A.J.; Al-Azzawi, R.S. Design of a Robust Controller Based on Barrier Function for Vehicle Steer-by-Wire Systems. World Electr. Veh. J. 2024, 15, 17. [Google Scholar] [CrossRef]
- Irmer, M.; Degen, R.; Nüßgen, A.; Thomas, K.; Henrichfreise, H.; Ruschitzka, M. Development and Analysis of a Detail Model for Steer-by-Wire Systems. IEEE Access 2023, 11, 7229–7236. [Google Scholar] [CrossRef]
- Shi, G.B.; Guo, C.; Wang, S.; Liu, T.Y. Angle Tracking and Fault-Tolerant Control of Steer-by-Wire System with Dual Three-Phase Motor for Autonomous Vehicle. IEEE Trans. Intell. Transp. Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, B.; Wang, D.; Chai, T. Event-Triggered Prespecified Performance Control for Steer-by-Wire Systems with Input Nonlinearity. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6922–6931. [Google Scholar] [CrossRef]
- Mortazavizadeh, S.A.; Ghaderi, A.; Ebrahimi, M.; Hajian, M. Recent Developments in the Vehicle Steer-by-Wire System. IEEE Trans. Transp. Electrif. 2020, 6, 1226–1235. [Google Scholar] [CrossRef]
- Fahami, S.M.H.; Zamzuri, H.; Mazlan, S.A.; Zakaria, M.A. Modeling and simulation of vehicle steer by wire system. In Proceedings of the 2012 IEEE Symposium on Humanities, Science and Engineering Research, Kuala Lumpur, Malaysia, 24–27 June 2012; pp. 765–770. [Google Scholar]
- Krishna, S.; Narayanan, S.; Denis Ashok, S. Fuzzy logic based yaw stability control for active front steering of a vehicle. J. Mech. Sci. Technol. 2014, 28, 5169–5174. [Google Scholar] [CrossRef]
- Azzalini, M.; Gissinger, G.L.; Boussouar, V.; Coutant, P. Computation of a variable steering ratio with a fuzzy logic method. In Proceedings of the Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; Volume 251, pp. 259–267. [Google Scholar]
- Bianchi, D.; Borri, A.; Benedetto, M.D.D.; Gennaro, S.D. Active Attitude Control of Ground Vehicles with Partially Unknown Model. IFAC-PapersOnLine 2020, 53, 14420–14425. [Google Scholar] [CrossRef]
- Yang, H.; Liu, W.; Chen, L.; Yu, F. An adaptive hierarchical control approach of vehicle handling stability improvement based on Steer-by-Wire Systems. Mechatronics 2021, 77, 102583. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, C.; Chen, J.; Yu, X.; Jing, S. Research on Logic Control of Variable Transmission Ratio SBW based on Pan-Boolean Algebra. In Proceedings of the 2021 International Conference on Robotics and Control Engineering, Tokyo, Japan, 23 April 2021; pp. 54–58. [Google Scholar]
- Zhai, P.; Du, H.; Li, Z. Bilateral control of vehicle Steer-by-Wire system with variable gear-ratio. In Proceedings of the 2013 IEEE 8th Conference on Industrial Electronics and Applications (ICIEA), Melbourne, VIC, Australia, 19–21 June 2013; pp. 811–815. [Google Scholar]
- Zhang, Q.Y.; Lin, W.P.; Wang, Y.R.; Wu, X.J.; Luo, Y.J. Control Strategy of the Vehicle’s Active Steer by Wire. J. Coast. Res. 2020, 103, 355–360. [Google Scholar] [CrossRef]
- Fang, L.; Lifang, W.; Chenglin, L.; Yan, W. Active steering control strategy of steer-by-wire system based on variable steering ratio. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Liu, Z.; Xu, X.; Xie, J.; Wang, F.; Su, P. Variable transmission ratio design of a steer-by-wire system for intelligent vehicles. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 9341–9353. [Google Scholar] [CrossRef]
- Zou, S.; Luan, Z.; Zhao, W.; Wang, C. Personalized design strategy of vehicle steer-by-wire characteristics considering driving style. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 253–266. [Google Scholar] [CrossRef]
- Yu, H.; Güvenç, L.; Özgüner, Ü. Heavy duty vehicle rollover detection and active roll control. Veh. Syst. Dyn. 2008, 46, 451–470. [Google Scholar] [CrossRef]
- Hu, C.; Wang, Z.; Qin, Y.; Huang, Y.; Wang, J.; Wang, R. Lane Keeping Control of Autonomous Vehicles with Prescribed Performance Considering the Rollover Prevention and Input Saturation. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3091–3103. [Google Scholar] [CrossRef]
- Yang, X.; Wu, C.; He, Y.; Lu, X.Y.; Chen, T. A Dynamic Rollover Prediction Index of Heavy-Duty Vehicles with a Real-Time Parameter Estimation Algorithm Using NLMS Method. IEEE Trans. Veh. Technol. 2022, 71, 2734–2748. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.; Wang, C.; Wang, S.; Liu, J.; Wang, Q. Switched model predictive controller for path tracking of autonomous vehicle considering rollover stability. Veh. Syst. Dyn. 2022, 60, 4166–4185. [Google Scholar] [CrossRef]
- Prakash, R.; Dheer, D.K. Evolutionary Algorithms Based Model Predictive Control for Vehicle Lateral and Roll Motion Control. Arab. J. Sci. Eng. 2023, 48, 6857–6871. [Google Scholar] [CrossRef]
- Ding, X.; Wang, Z.; Zhang, L.; Liu, J. A Comprehensive Vehicle Stability Assessment System Based on Enabling Tire Force Estimation. IEEE Trans. Veh. Technol. 2022, 71, 11571–11588. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, A.; Zou, S.; Zhang, H. Individual Auxiliary and Fault-Tolerant Control of Steer-by-Wire System Considering Different Drivers Steering Characteristics. IEEE/ASME Trans. Mechatron. 2021, 26, 1558–1569. [Google Scholar] [CrossRef]
- Wang, J.; Wang, H.; Jiang, C.; Cao, Z.; Man, Z.; Chen, L. Steering Feel Design for Steer-by-Wire System on Electric Vehicles. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 533–538. [Google Scholar]
- Foroughi, B.; Nhan, P.V.; Iranmanesh, M.; Ghobakhloo, M.; Nilashi, M.; Yadegaridehkordi, E. Determinants of intention to use autonomous vehicles: Findings from PLS-SEM and ANFIS. J. Retail. Consum. Serv. 2023, 70, 103158. [Google Scholar] [CrossRef]
- Selma, B.; Chouraqui, S.; Selma, B.; Abouaïssa, H. ANFIS controller design based on pigeon-inspired optimization to control an UAV trajectory tracking task. Iran J. Comput. Sci. 2021, 4, 1–16. [Google Scholar] [CrossRef]
- Karaboga, D.; Kaya, E. Adaptive network based fuzzy inference system (ANFIS) training approaches: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2263–2293. [Google Scholar] [CrossRef]
- Kumar, S.Y.V.; Mukku, M.; Jonnalagadda, V.K.; Gudidh, A.; Mukku, M.; Kumar, P. Speed Control Analysis of an Electrical Vehicle by Using Fuzzy- PID and ANFIS Controllers. In Proceedings of the 2022 3rd International Conference on Communication, Computing and Industry 4.0 (C2I4), Bangalore, India, 15–16 December 2022; pp. 1–6. [Google Scholar]
- George, M.A.; Kamat, D.V.; Kurian, C.P. Electric vehicle speed tracking control using an ANFIS-based fractional order PID controller. J. King Saud Univ. Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Krishna, S.; Ashok, S.D.; Narayanan, S. ANFIS-based active front steering system for reducing yaw disturbance of a vehicle using steer-by-wire system. Int. J. Dyn. Control 2023. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| The vehicle mass (kg) | 7620 |
| The distances from the center of gravity to the front axle (m) | 3.105 |
| The distances from the center of gravity to the rear axle (m) | 1.385 |
| The moment of inertia of the vehicle about the -axis (kgm2) | 30,782 |
| The lateral stiffness of the front wheels (kN/rad) | 230,390.74 |
| The lateral stiffness of the rear wheels (kN/rad) | 434,846.78 |
| Maximum Steering Wheel Angle (deg) | Fixed Ratio | Variable Ratio |
|---|---|---|
| 20 km/h | 72.62 | 29.08 |
| 40 km/h | 83.89 | 76.21 |
| Evaluation Metrics | Fixed Ratio | Variable Ratio |
|---|---|---|
| Comprehensive Evaluation | 10.58 | 10.42 |
| Lateral Error Metric | 0.3242 | 0.3355 |
| Angular Velocity Metric | 22.25 | 21.89 |
| Lateral Acceleration Metric | 8.021 | 7.938 |
| Roll Angle Metric | 0.9295 | 0.9285 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Zhang, F.; Su, L.; Song, G.; Liu, Z.; Zhang, Y. Research on Variable Transmission Ratio Control Method to Improve Vehicle Handling Comfort Based on Steer-by-Wire System. Actuators 2024, 13, 48. https://doi.org/10.3390/act13020048
Lin J, Zhang F, Su L, Song G, Liu Z, Zhang Y. Research on Variable Transmission Ratio Control Method to Improve Vehicle Handling Comfort Based on Steer-by-Wire System. Actuators. 2024; 13(2):48. https://doi.org/10.3390/act13020048
Chicago/Turabian StyleLin, Jiaxin, Feng Zhang, Liang Su, Guangji Song, Zhiwei Liu, and Yong Zhang. 2024. "Research on Variable Transmission Ratio Control Method to Improve Vehicle Handling Comfort Based on Steer-by-Wire System" Actuators 13, no. 2: 48. https://doi.org/10.3390/act13020048
APA StyleLin, J., Zhang, F., Su, L., Song, G., Liu, Z., & Zhang, Y. (2024). Research on Variable Transmission Ratio Control Method to Improve Vehicle Handling Comfort Based on Steer-by-Wire System. Actuators, 13(2), 48. https://doi.org/10.3390/act13020048