

Study on Dynamic Characteristics of Pipeline Jet Cleaning Robot


Abstract
1. Introduction
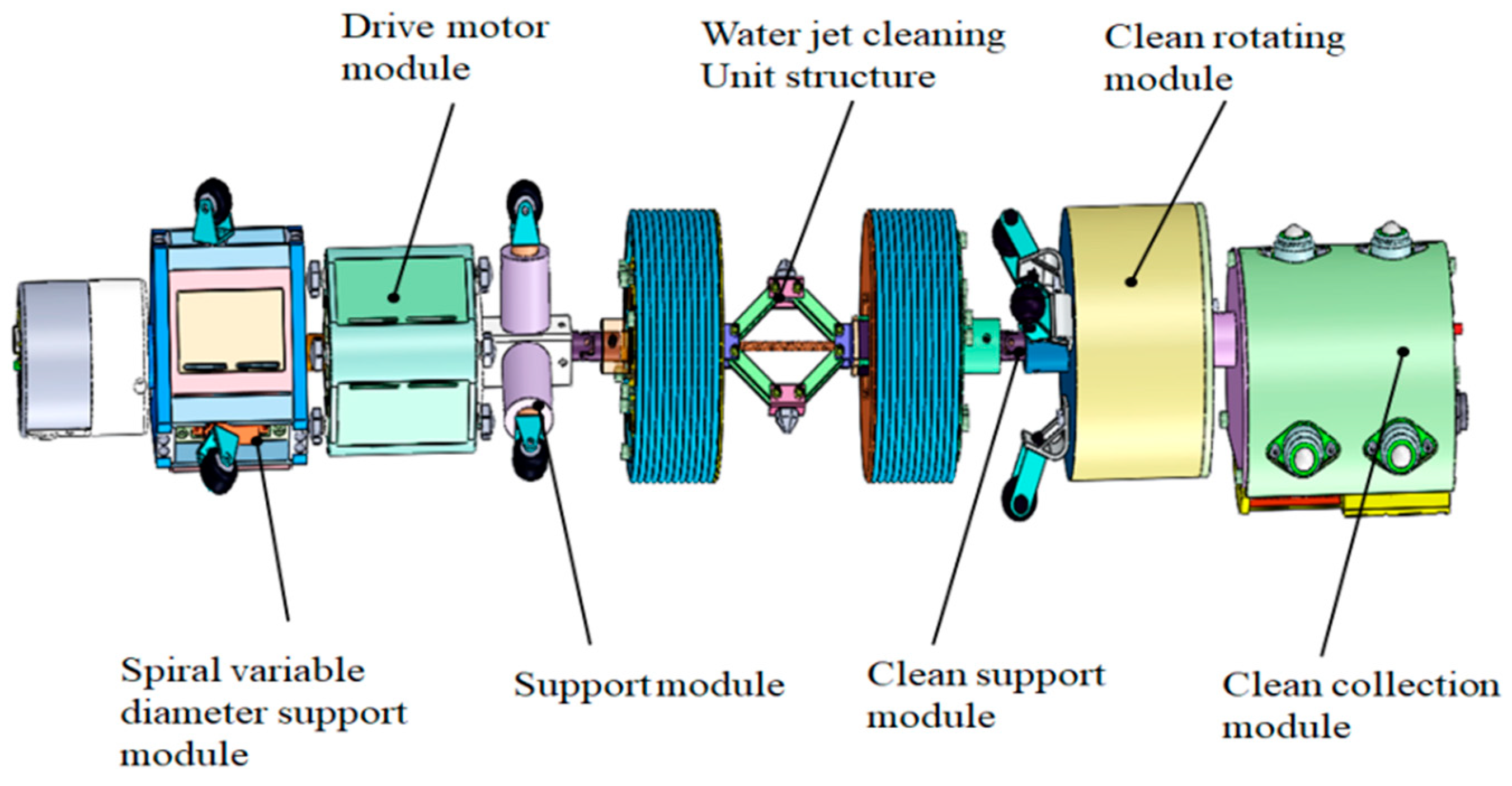
2. Pipeline Inspection and Cleaning Robot Mechanism Design
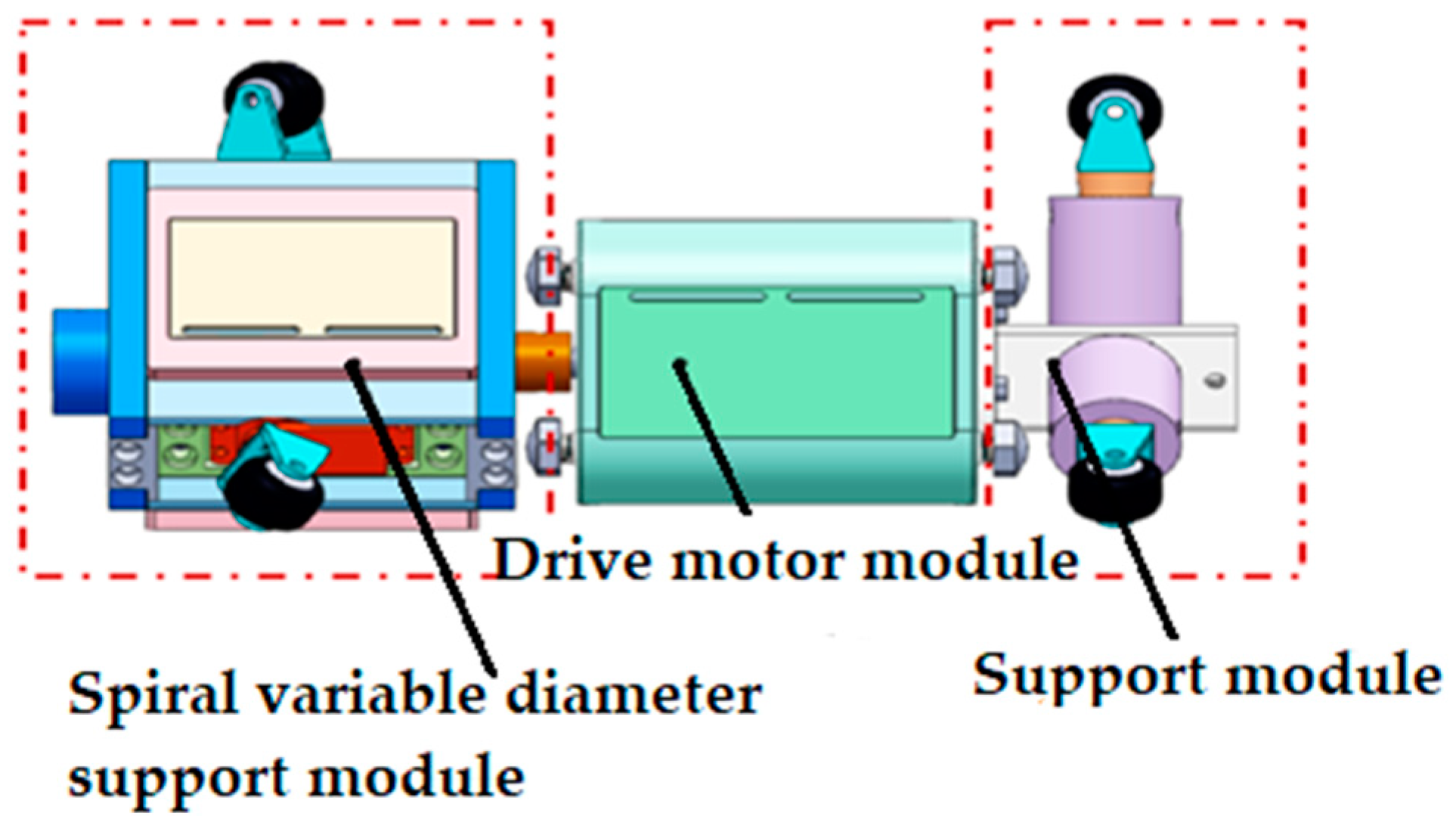
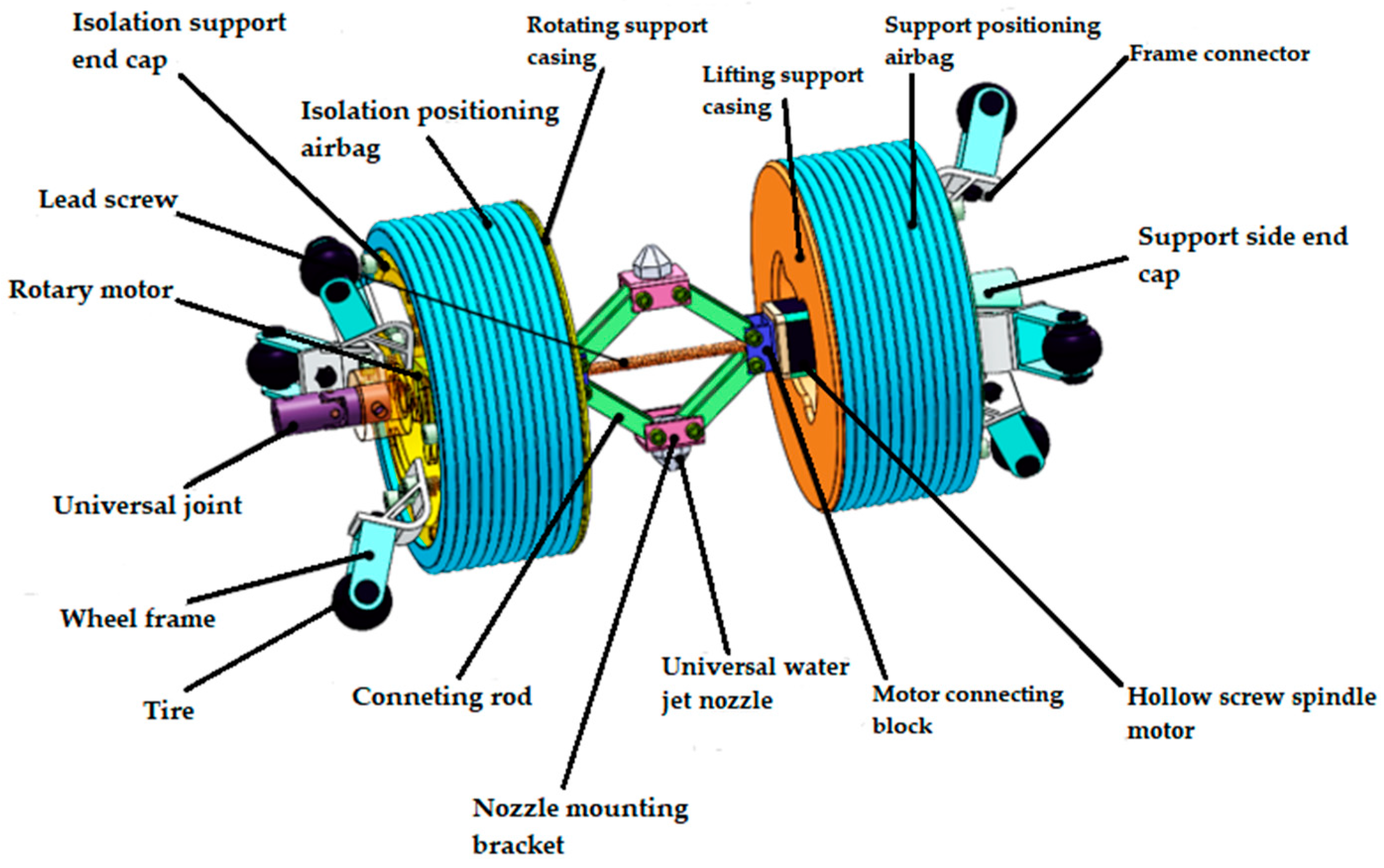
2.1. Drive Unit Structure Design
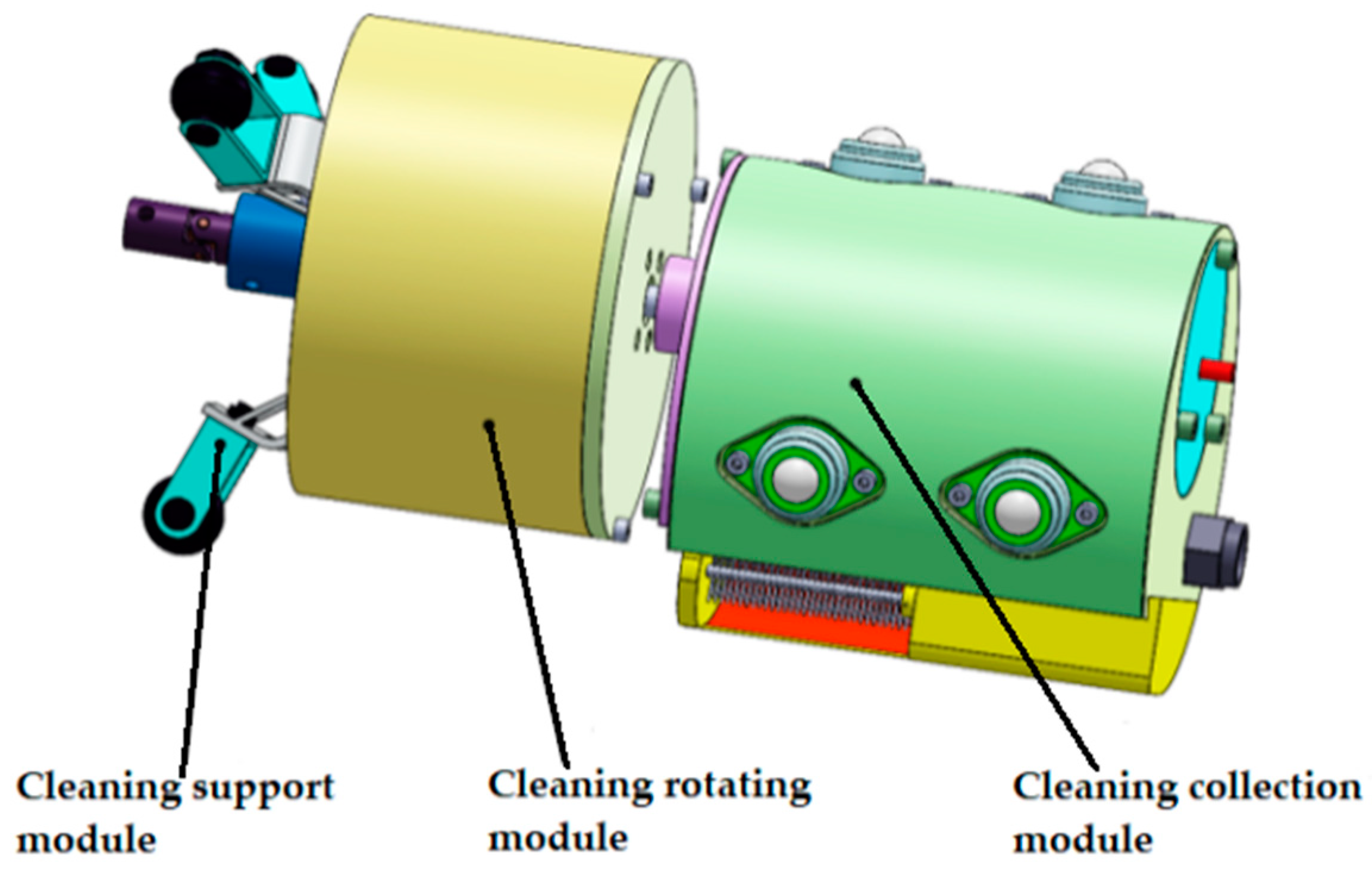
2.2. Structural Design of Water Cleaning Unit
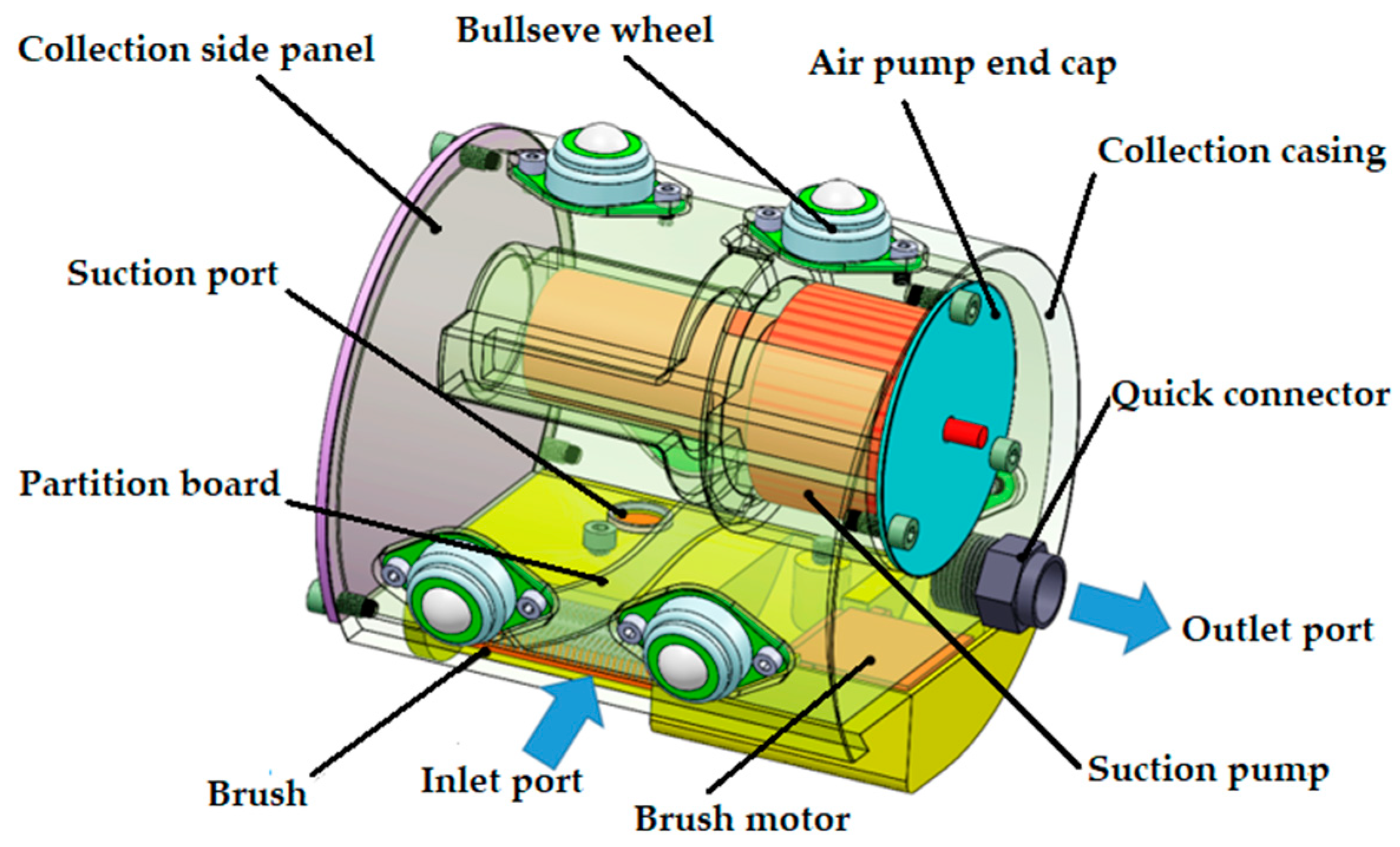
2.3. Clean Up the Collection Unit Structure Design
3. Dipping Water Jet Cleaning Model Analysis
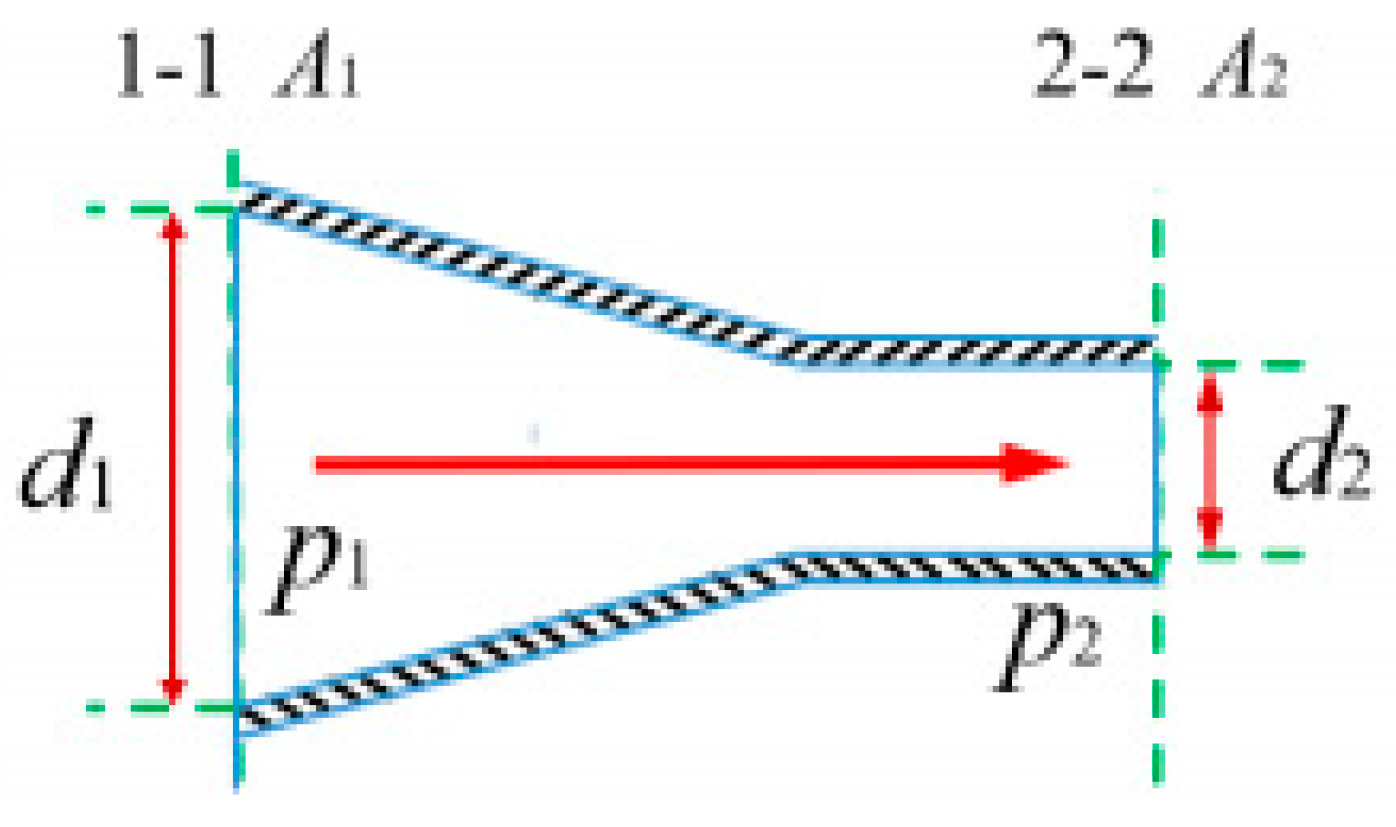
3.1. Jet Velocity
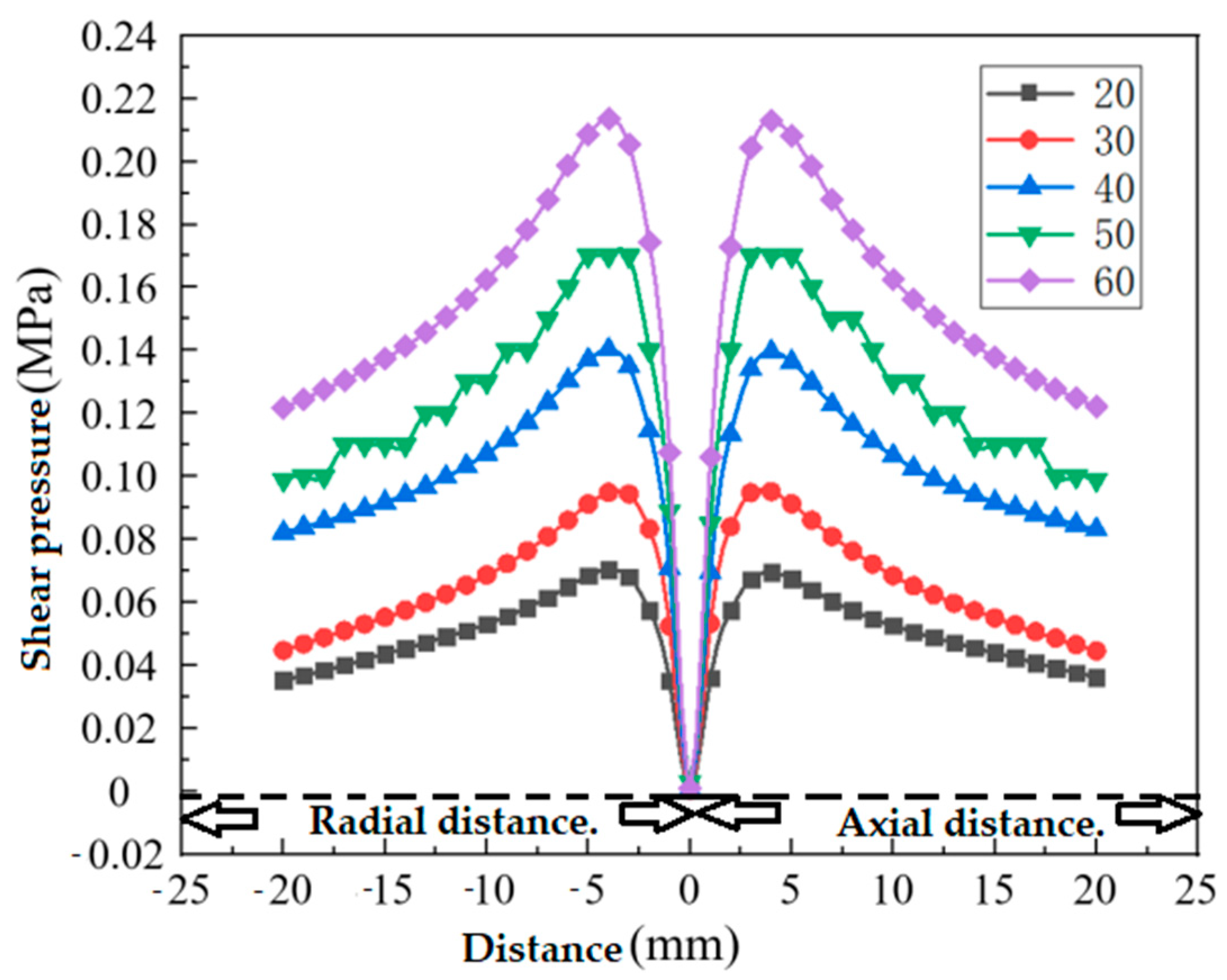
3.2. Water Jet Shear Force
- (1)
- Appropriately increasing the flow rate and angle can improve the cleaning performance.
- (2)
- The speed of the nozzle is proportional to the square root of the nozzle pressure, so appropriately increasing the nozzle pressure can improve the cleaning effect.
4. Simulation Analysis of Water Jet Cleaning of Robot Cleaning Device
4.1. The Impact of Jet Pressure on Cleaning Efficiency
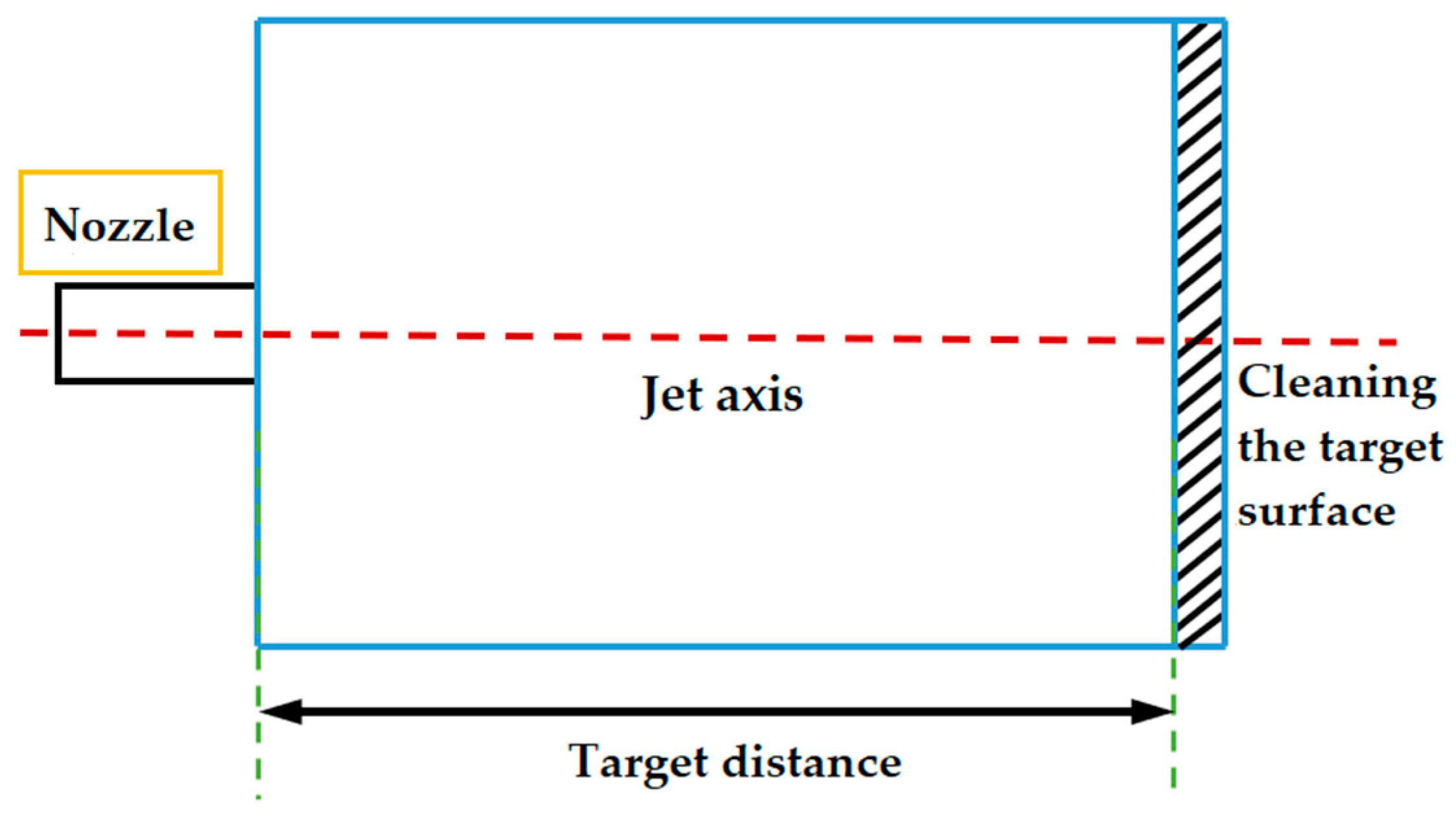
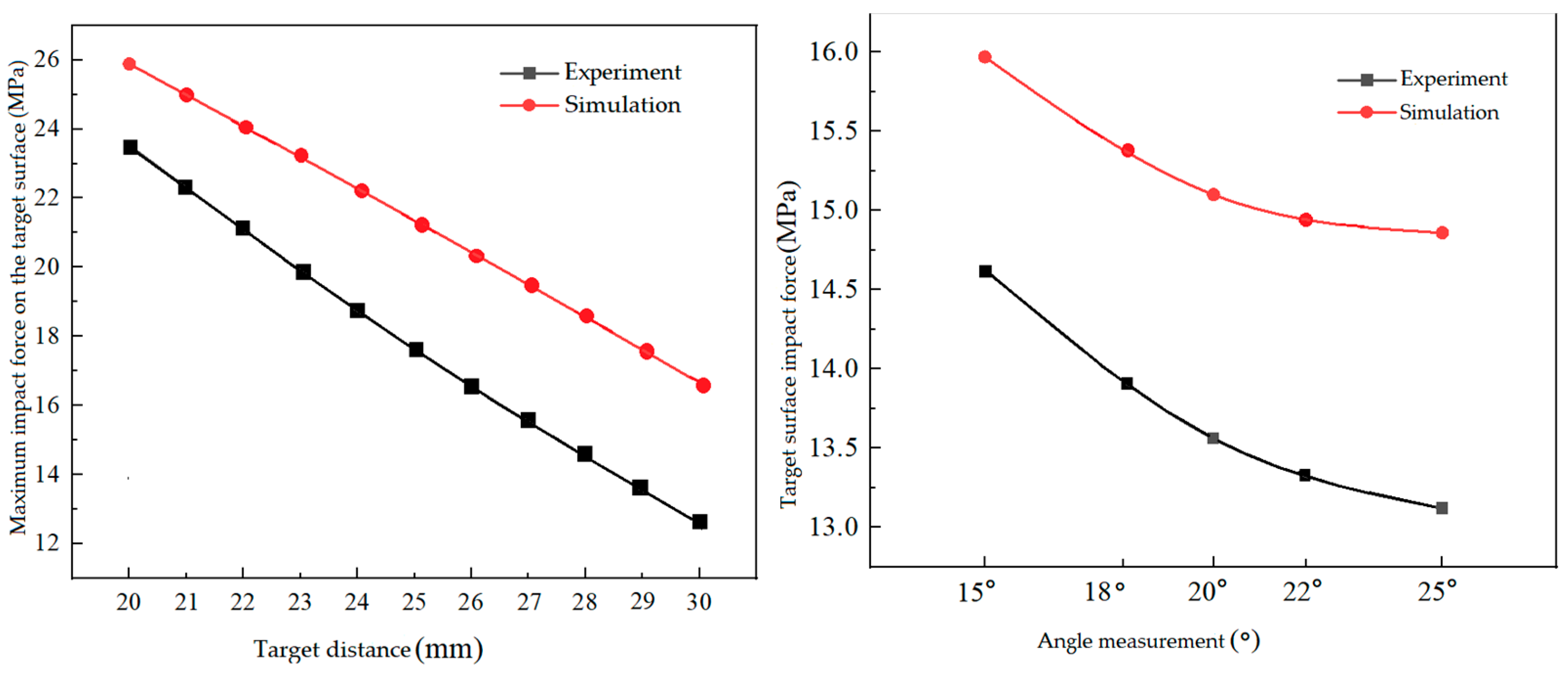
4.2. Influence of Jet Target Distance on Cleaning Effect
4.3. The Effect of Inclination Angle on Cleaning Effectiveness
5. Experimental Study on Characteristics of Robot Water Jet Cleaning
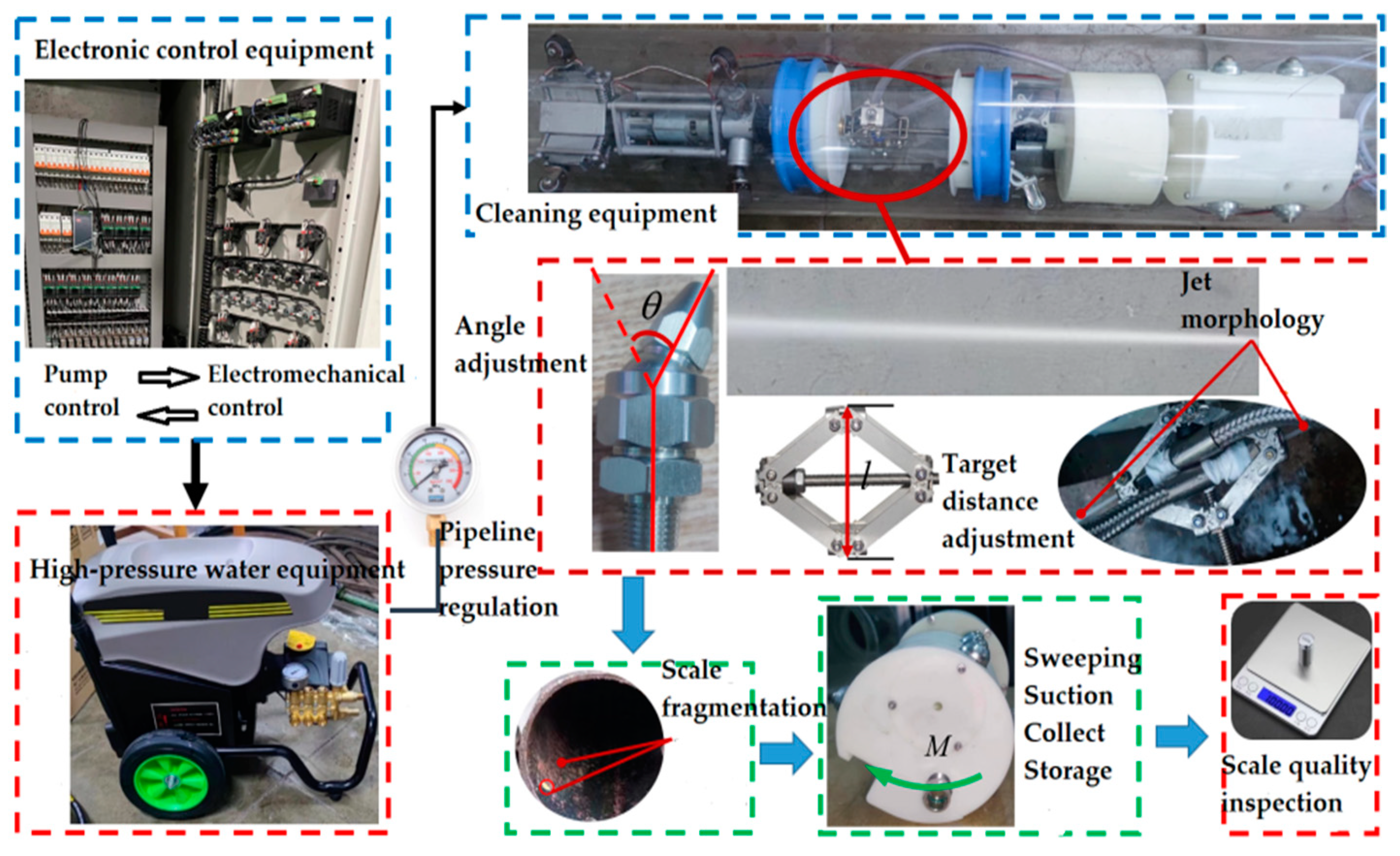
5.1. Establishment of the Experimental Platform for Pipeline Robot Water Jet Cleaning
5.2. Cleaning Experiment Process
- (1)
- Follow the design to assemble the experimental setup. Connect the drive unit to the water jet cleaning unit and link the high-pressure water pump to the cleaning unit. Inspect pipeline seals to prevent high-pressure water hose detachment during cleaning.
- (2)
- Place the apparatus within the pipe and refine the robot’s movement for water jet cleaning. Inflate the isolation airbag to prevent interference. Adjust the water jet’s rotation speed and occasionally change the motor rotation direction to prevent hose tangling. After completing one full cleaning cycle, deflate the airbag, and move the apparatus forward by one width for the next cycle. Continue this process until all dirt is thoroughly removed.
- (3)
- Subsequently, dry the pipes meeting the standards and measure the quality difference before and after cleaning.
- (4)
- Lastly, the experimental pipes undergo multiple cleaning cycles to ensure thorough dirt removal. Additionally, an anti-rust treatment is applied to prevent corrosion.
5.3. Experimental Analysis
5.3.1. Experimental and Simulation Analysis
5.3.2. Experimental Fluid Resistance
5.3.3. Experimental Analysis of Pipeline Jet Cleaning
6. Conclusions
- (1)
- We propose a mechanical and water jet cleaning method to efficiently remove pipeline impurities without causing damage to the pipes. The device employs scraping, brushing, and suction to collect impurities within the pipeline.
- (2)
- Higher jet pressure enhances shearing forces and improves cleaning efficiency. Applying greater pressure at a target distance of around 25 mm (12–13-times the nozzle exit diameter) yields superior cleaning results.
- (3)
- Adjusting the nozzle angle affects impact and shearing forces during cleaning. A 15° incident angle achieves optimal cleaning with a strong shearing force of approximately 0.11 MPa. Properly adjusting parameters like target distance and incident angle significantly enhances jet cleaning efficiency.
- (4)
- Using an in-pipe cleaning platform, the optimal cleaning conditions for the robot were determined: 25 mm target distance and 15° incident angle. This research on the spiral-driven robot provides a theoretical basis for pipeline cleaning, inspection, and maintenance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, W.; Zhao, S. Research status and prospects of pipeline robots. Ordnance Ind. Autom. 2019, 38, 24–30. [Google Scholar]
- Liu, Y. Structure and control system design of variable diameter pipeline robot. Agric. Equip. Veh. Eng. 2022, 60, 114–116. [Google Scholar]
- Lu, Y.J. Design and research on modular adaptive pipeline robot mechanism. Gansu Sci. Technol. 2021, 37, 10–14+18. [Google Scholar]
- Li, Z.Q.; Li, W.G.; Feng, Z.C.; Wang, L.L.; Yan, W.G.; Guo, S.J. Structure and passability analysis of pipeline robots. Mech. Transm. 2021, 45, 146–152. [Google Scholar]
- Zhang, Y.J. Overview of pipeline robots. Equip. Manuf. Technol. 2021, 6, 114–117+138. [Google Scholar]
- Xiao, C.; Tu, F.Q.; Xing, Y.; Lei, D. Optimization design of variable diameter mechanism for urban drainage pipeline cleaning robot. Manuf. Autom. 2021, 43, 89–92. [Google Scholar]
- Rashid, M.Z.A.; Yakub, F.; Zaki, S.A.; Ali, M.S.M.; Mamat, N.M.; Putra, S.M.S.; Roslan, S.A.; Shah, H.N.M.; Aras, M.S.M.; Arshad, M.R. Reconfigurable multi-legs robot for pipe inspection: Design and gait movement. Indian J. Geo-Mar. Sci. 2019, 48, 1132–1144. [Google Scholar]
- Yeh, C.-Y.; Chen, C.-Y.; Juang, J.-Y. Soft hopping and crawling robot for in-pipe traveling. Extreme Mech. Lett. 2020, 39, 100854. [Google Scholar] [CrossRef]
- Wu, T.-T.; Zhao, H.; Gao, B.-X.; Meng, F.-B. Structural optimization strategy of pipe isolation tool by dynamic plugging process analysis. Pet. Sci. 2021, 18, 1829–1839. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, N.; Zhao, W.C.; Lu, D.Y. Design and testing of peristaltic soft pipe robot. Food Mach. 2020, 36, 82–86. [Google Scholar]
- Yang, C.X.; Li, J.J.; Xu, X.D. Design and simulation research on traction mechanism of supported oil and gas pipeline robot. China Equip. Eng. 2020, 07, 83–85. [Google Scholar]
- Kakogawa, A.; Ma, S. Design of a multilink-articulated wheeled pipeline inspection robot using only passive elastic joints. Adv. Robot. 2018, 32, 37–50. [Google Scholar] [CrossRef]
- Gao, Y.B.; Xiang, X.; Guo, X.Y.; Han, P.Z. Research on characteristics and mechanism of coal and rock drilling by water jet impact. J. Vib. Shock 2022, 41, 51–59+85. [Google Scholar]
- Wan, L.; Qian, Y.N.; Tu, Y.X.; Du, H.; Wu, S.J.; Li, D. Prediction of profile characteristics in single-pass milling of titanium alloy with abrasive water jet. J. Mech. Eng. 2022, 58, 296–305. [Google Scholar]
- Wu, W.; Tang, Y.; Yuan, S.; Li, M.J. Influence of pipeline symmetry on flow field of rear-mix abrasive water jet nozzle. Fluid Mach. 2022, 50, 97–104. [Google Scholar]
- Liu, Y.; Zhou, J.; Wang, P.; Kong, X.; Zhao, Y.; Chen, H.; Zhou, Y. Design and Antiblast Analysis of Mechanical Plugging Devices in Coastal Defense Engineering. J. Coast. Res. 2020, 111, 101–107. [Google Scholar] [CrossRef]
- Zhang, S.; Dubljevic, S. Trajectory determination for pipelines using an inspection robot and pipeline features. Metrol. Meas. Syst. 2021, 28, 439–453. [Google Scholar] [CrossRef]
- Yaqub, S.; Ali, A.; Usman, M.; Zuhaib, K.M.; Khan, A.M.; An, B.; Moon, H.; Lee, J.Y.; Han, C. A Spiral Curve Gait Design for a Modular Snake Robot Moving on a Pipe. Int. J. Control Autom. Syst. 2019, 10, 2565–2573. [Google Scholar] [CrossRef]
- Zhu, Y.; He, X.; Liu, Q.; Guo, W. Semiclosed-loop motion control with robust weld bead tracking for a spiral seam weld beads grinding robot. Robot. Comput. Manuf. 2022, 73, 102254. [Google Scholar] [CrossRef]
- Mizukami, M.; Harada, D.; Hanajima, N.; Fujihira, Y. Movement control for an omnidirectional mobile mechanism for pipe-inspect ion robot in small diameter pipes. Seimitsu Kogaku Kaishi/J. Jpn. Soc. Precis. Eng. 2020, 86, 898–903. [Google Scholar] [CrossRef]
- Chi, M.; Zhang, J.; Liu, R.; Wang, Y.; Nie, G.; Qian, X. Coupled steering control of a low torsional torque capsule robot in the intestine. Mechatronics 2021, 77, 102596. [Google Scholar] [CrossRef]
- Bai, J.; Wu, J.; Chi, M.; Fan, Z.; Du, Z. Self-starting Characteristics of Magnetic Controlled Spiral Capsule Robots. J. Eng. Sci. Technol. Rev. 2019, 12, 43–52. [Google Scholar] [CrossRef]
- Ito, F.; Takaya, K.; Kamata, M.; Okui, M.; Yamada, Y.; Nakamura, T. In-Pipe Inspection Robot Capable of Actively Exerting Propulsive and Tractive Forces With Linear Antagonistic Mechanism. IEEE Access 2021, 9, 131245–131259. [Google Scholar] [CrossRef]
- Kazeminasab, S.; Sadeghi, N.; Janfaza, V.; Razavi, M.; Ziyadidegan, S.; Banks, M.K. Localization, Mapping, Navigation, and Inspection Methods in In-Pipe Robots: A Review. IEEE Access 2021, 9, 162035–162058. [Google Scholar] [CrossRef]
- Li, T.; Liu, K.; Liu, H.; Cui, X.; Li, B.; Wang, Y. Rapid design of a screw drive in-pipe robot based on parameterized simulation technology. Simul. Trans. Soc. Model. Simul. Int. 2019, 95, 659–670. [Google Scholar] [CrossRef]
- Yang, W. Mechanism Design and Pipeline Traversability Study of Active Helical Driven Pipeline Robot; Harbin Institute of Technology: Harbin, China, 2018. [Google Scholar]
- Cao, J.S.; Xu, B.D.; Lu, J.; Liu, Q.; Zhang, Y.; Huang, Z.M. Crawl-type sewage pipeline dredging robot. Mach. Tool Hydraul. 2014, 42, 50–53. [Google Scholar]
- Yan, H.; Li, J.; Kou, Z.; Liu, Y.; Li, P.; Wang, L. Research on the Traction and Obstacle-Surmounting Performance of an Adaptive Pipeline-Plugging Robot. Stroj. Vestn. J. Mech. Eng. 2022, 68, 14–26. [Google Scholar] [CrossRef]
- Yan, H.; Zhao, P.; Xiao, C.; Zhang, D.; Jiao, S.; Pan, H.; Wu, X. Design and Kinematic Characteristic Analysis of a Spiral Robot for Oil and Gas Pipeline Inspections. Actuators 2023, 12, 240. [Google Scholar] [CrossRef]
- Venkateswaran, S.; Furet, M.; Chablat, D.; Wenger, P. Design and analysis of a tensegrity mechanism for a bio-inspired robot. In Proceedings of the ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019; ASME: New York, NY, USA, 2019; pp. 1–10. [Google Scholar]
- Yu, T.; Guo, H.P.; Fan, X.; Kong, L.Z. Design and optimization of a new air conditioning ventilation duct cleaning robot. Mech. Des. Manuf. 2019, 04, 248–250. [Google Scholar]
- He, F.J.; Yao, J.; Liu, K.; Ren, Y.J.; Cheng, S.C. Design and motion analysis of variable-caliber fluid-driven pipeline robot. Coal Mine Mach. 2022, 43, 75–78. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameter | Parameter Value |
|---|---|
| Pipe diameter | DN180–DN220 |
| Total length of the drive unit | l ≤ 600 mm |
| Total robot length | L ≤ 1500 mm |
| Total mass | m ≤ 10 kg |
| Maximum inspection speed | v ≥ 3 m/min |
| Drive unit no-load traction | F ≥ 35 N |
| The bias angle of the screw drive wheel θ adjustment range | 0°–89° |
| Jet medium density | 998 kg/m3 |
| Working Condition | Pressure | Target Distance | Incident Angle | Cleaning Quality |
|---|---|---|---|---|
| 1 | 20 MPa | 20 mm | 15° | 73.4% |
| 2 | 20 mm | 20° | 72.1% | |
| 3 | 25 mm | 15° | 72.6% | |
| 4 | 25 mm | 20° | 71.3% | |
| 5 | 30 mm | 15° | 66.6% | |
| 6 | 30 mm | 20° | 65.2% | |
| 7 | 30 MPa | 20 mm | 15° | 83.6% |
| 8 | 20 mm | 20° | 81.4% | |
| 9 | 25 mm | 15° | 86.7% | |
| 10 | 25 mm | 20° | 84.2% | |
| 11 | 30 mm | 15° | 74.6% | |
| 12 | 30 mm | 20° | 72.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Niu, H.; Chang, Q.; Zhao, P.; He, B. Study on Dynamic Characteristics of Pipeline Jet Cleaning Robot. Actuators 2024, 13, 49. https://doi.org/10.3390/act13020049
Yan H, Niu H, Chang Q, Zhao P, He B. Study on Dynamic Characteristics of Pipeline Jet Cleaning Robot. Actuators. 2024; 13(2):49. https://doi.org/10.3390/act13020049
Chicago/Turabian StyleYan, Hongwei, Hailong Niu, Qi Chang, Pengyang Zhao, and Bolong He. 2024. "Study on Dynamic Characteristics of Pipeline Jet Cleaning Robot" Actuators 13, no. 2: 49. https://doi.org/10.3390/act13020049
APA StyleYan, H., Niu, H., Chang, Q., Zhao, P., & He, B. (2024). Study on Dynamic Characteristics of Pipeline Jet Cleaning Robot. Actuators, 13(2), 49. https://doi.org/10.3390/act13020049