Abstract
The parametrization of the thermomechanical behavior of shape memory alloys (SMAs) under constant load is described in terms of their functional properties. The deformation–temperature–stress behavior of SMAs from various alloy systems—such as Ni-Ti, Ni-Ti-Cu, and Ni-Mn-Ga—was parametrized using a sigmoidal function. This approach enables the characterization of phase transformation parameters, including transformation temperatures, kinetic parameters, and the relationship between recoverable deformation and applied stress. It is shown that the sigmoid function can serve as a universal descriptor of thermoelastic phase transformations across different alloy systems and transformation types, such as B2–R–B19′–R–B2 (Ni-Ti-Cu), B2–R–B19′–B2 (Ni-Ti), and B2 (L21)–B19′ (L20)–B2 (L21). A correlation coefficient of approximately 0.99 was achieved. The present work extends the theoretical framework of diffuse martensitic transitions in SMAs, for which the sigmoid function has been theoretically derived to describe phase fractions. The article’s novelty lies in shifting from pure mathematical approximation (curve fitting) to physical parametrization of SMA behavior specifically under constant stress (actuator mode).
1. Introduction
Shape memory alloys (SMAs) have remained a focus of materials science research for several decades, ever since the thermoelastic martensitic phase transformation was first studied by Kurdumov [1] and Ni-Ti (Nitinol) alloys were developed by Buehler in the 1960s. These alloys possess unique properties—such as high mechanical strength, biocompatibility, and large recoverable deformation—that make them suitable for a wide range of applications from medicine to aerospace [2,3]. Advances in melting techniques and thermomechanical processing have significantly improved the quality, reliability, and functionality of SMAs, thereby expanding their practical use [2,3]. However, the full exploitation of these materials is still limited by the lack of precise data on phase transition characteristics and the stress thresholds required to achieve maximum mechanical work output [2].
One of the outstanding application areas of SMAs is aerospace systems, particularly wing-morphing technologies [4] by constructing a composite construction or material based on SMAs. For example, in [5] an experimental prototype of a laminar wing (1 m span, 0.5 m chord) for subsonic speeds (Mach 0.2–0.3) is presented. The actuator assembly, consisting of six 1.8 m Ti-50.26 at%Ni wires, is located inside the torsion box of the wing and, through a transmission system (a slider–crank mechanism with gear ratio R = 3), controls the deformation of the flexible upper skin. The system, which operates against a bias spring (a gas spring), was tested in a wind tunnel and demonstrated the ability to change the airfoil shape (up to 8.16 mm), resulting in drag reduction. Another approach to controlling aerodynamic surfaces is explored in [6], where SMA is used for active control of vibrations and stiffness. In that work a demonstrator in the form of a winglet was created [7] with pre-stressed NiTiCu wires (150 µm diameter) embedded in a Kevlar–epoxy matrix. When activated (heated), the wires attempt to recover their shape, generating high internal stresses in the composite. This leads to a significant increase in the effective stiffness of the structure, allowing its natural resonance frequency to be shifted (up to 40% in beam-specimen experiments) away from the frequency of external excitation, thus damping vibrations. A similar “active skin” concept is proposed in [8] for reducing turbulent drag. In that work SMA (or piezoelectric) actuators generate a traveling surface wave in the transverse direction with a microscale amplitude (about 30 µm), which, according to DNS modeling, can significantly reduce turbulent drag (by more than 30%). Of particular interest is the use of SMA in autonomous systems of a spacecraft, where reliability and the absence of external power supply are critical. In [9,10] the development of a composite morphing radiator for spacecraft thermal control systems is described. SMA actuators (wires and ribbons) passively respond to the temperature of the working fluid: when heated they contract, “opening” the radiator to increase heat rejection into space. When cooled the stiffness of the composite panel itself returns the radiator to the closed position. A similar passive thermal-control principle is used in [11] to create an autonomous three-way splitter valve for spacecraft thermal management systems (developed in response to a NASA request). In this design SMA springs (Nitinol) operate together with conventional bias springs. Hot fluid (85 °C) causes the SMA to contract, directing the flow to the radiator, while cold fluid (20 °C) allows the bias spring to return the valve to the recirculation position. The prototype successfully demonstrated the required 5 mm stroke. In [12] an autonomous hinge for deploying satellite radiators is also presented. It uses NiTi wire embedded in an Ecoflex matrix and is activated by a silver-paste heater powered by solar cells, demonstrating 45° bending upon heating. Other space applications include reconfigurable helical antennas articulated by antagonistic SMA actuators [13]. Beyond spacecraft SMAs are being considered for components of planetary rovers, which must operate in extreme thermal environments. In [14] an active suspension for lunar and Martian rovers based on two antagonistic sets of SMA springs (Dynalloy Flexinol) is investigated. Experiments showed that the SMA suspension significantly reduces peak loads on the chassis (by 88% compared to a standard spring), and, critically, its performance is temperature-invariant (from 20 °C down to −15 °C), unlike hydraulic dampers, which degrade in cold conditions. In [15] the use of NiTi in its superelastic (SE) regime for creating “spring tires” for Mars rovers is examined. The main focus of that work is the development of a large-scale numerical model, enabling virtual testing and parametric studies (wire diameter, coil pitch, etc.) to reduce the need for costly full-scale experiments. In [16] a soft morphing actuator capable of pure torsional motion is proposed. The design incorporates two SMA wires (Flexinol) embedded in a polydimethylsiloxane (PDMS) matrix with constant, opposite eccentricity, crossing the cross-section in opposite directions. Heating one wire generates a pure torque. In [17] a new lightweight alloy Ti75.25Al20Cr4.75 is reported, featuring high specific strength (185 kPa·m3/kg) and recovarable strain > 7%. The unique aspect of the alloy is that it maintains superelasticity over an unprecedented temperature range—from 4.2 K to 400 K. This is attributed to an unconventional negative temperature dependence of the transformation stress at cryogenic temperatures.
Still the modeling of SMA actuators behavior and evaluating functional properties are in great attention. Existing methods for evaluating the functional properties of SMA are mostly based on conventional testing approaches used for engineering materials, in which external mechanical work is applied to the specimen [18,19]. Although considerable attention has been given to assessing SMA performance under external loading, further research is needed to understand their behavior when the material itself performs mechanical work [20,21,22]. As actuators, SMAs resist external forces and generate mechanical work autonomously. Therefore, to accurately assess actuator performance, experimental data must be obtained under conditions where the SMA itself is the source of mechanical work.
Koledov et al. [23,24,25,26] analyzed deformation–temperature–stress dependencies using three-point bending and tensile tests across a wide range of SMA materials. Their results demonstrated that, for SMA-based actuator components, the threshold stress is more critical than the ultimate tensile stress. Furthermore, during multi-cycle actuation, as opposed to single-cycle operation, the maximum allowable stress must be significantly reduced to prevent the accumulation of permanent (plastic) deformation and to ensure long-term durability. These and other studies provide valuable experimental data that enable unified parametrization of SMA phase transitions in terms of transformation temperatures, threshold stress levels, and maximum recoverable deformation.
Several attempts have been made to use various approximation functions to model experimentally obtained data [27,28,29,30]. A well-known example is the Paris equation, used to describe fatigue crack growth rate [31,32]. The coefficients of this equation can serve as material-specific characteristics, establishing a relationship between crack growth rate and local stress intensity—an essential factor in strength and fatigue calculations for different mechanical systems.
The present work aims not only to approximate deformation–temperature–stress curves but also to establish a general parametrization method for thermoelastic martensitic transformations using experimental data and sigmoid functions. This approach can form the basis for AI-driven models capable of predicting transformation characteristics and related functional properties as well as for creating digital twins of SMA-based actuators, and it can perform a more accurate and adequate modeling of thermoelastic SMA actuators.
2. Materials and Methods
In our previous work we extensively investigated alloys exhibiting the shape memory effect (SME) in the Ni-Ti, Ni-Ti-Cu, and Ni-Mn-(Ga-Si) systems (Heusler alloys) [23,24,25,26,33,34,35,36]. These studies focused on the functional behavior of SME materials under conditions where they perform mechanical work, demonstrating the shape memory effect under applied stress. Experiments were conducted for both single-load and multiple-cycle loading conditions. The experimental setup measured bending deformation of SME samples (up to 2.5 × 12 × 1 mm) as a function of temperature and applied stress. The results yielded a series of deformation-versus-temperature curves at various stress levels, determined experimentally, as illustrated in Figure 1.
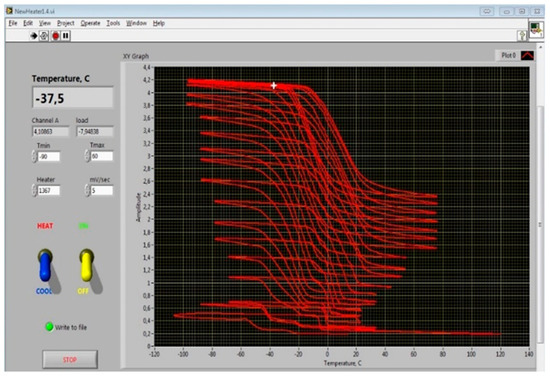
Figure 1.
Example of deformation temperature stress dependencies in interface of control program obtained for the sample of Ni-Ti alloy after equal angular pressing, hot forging, and annealing reprinting from [20]—raw data.
Thus, several alloy systems previously investigated by the three-point bending technique [23,25,33,34,35,36] were selected to study the parametrization technique using the sigmoid function. Based on the authors’ experience with these and other materials, it was observed that the relationship between recoverable deformation and applied stress during both direct and reverse thermoelastic martensitic transformations in alloys with functional properties under conditions where mechanical work is performed on external bodies follows a universal law similar in form to the Boltzmann sigmoidal function. The sigmoidal function originally proposed by Boltzmann in 1898 has the form:
Equation (1) simply describes when a given element x causes a transition from one phase that equals 1 to another phase that equals 0 and backwards. This type of functional change is similar in general form to first-order phase transformations, where a change in the order parameter leads to a discontinuous change in the free energy function, as proposed by Landau. However, this function has not previously been used to describe thermoelastic transformations in this manner. Modeling of martensitic transformations has traditionally relied on numerical approaches, such as Monte Carlo simulations. An important aspect is also the approximation of the observed dependence of deformation on temperature and stress. On one hand, this can be achieved using a complex polynomial, while on the other hand, it is possible to employ an analogous double Boltzmann sigmoidal function. Thus, another variant of Equation (1) is the double Boltzmann equation suitable to model the transition with x-offset:
where y0 and ymax are maximum and minimum values taken by y, p is the fraction of one phase relative to another, and Δx1 and Δx2 are the constants that stand for velocity of changing the y around x01 and x01 as a middle point of transitions. On Figure 2 is given an explanation and the differences of these functions on suitable graphs for one deformation temperature dependency at stress 150 MPa of a sample of Ni-Ti alloy after equal angular pressing, hot forging, and annealing [35].
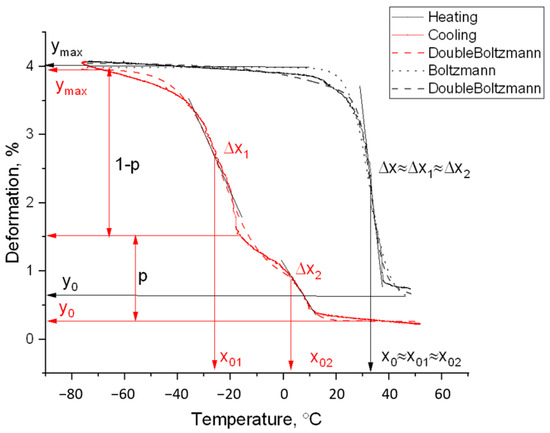
Figure 2.
Deformation temperature stress dependencies for the sample of Ni-Ti alloy after equal angular pressing, hot forging, and annealing adapted from [35] and parametrized by Equation (1) (for heating curve only) and Equation (2).
Attempts to fit the deformation–temperature curves using both equations showed that Equation (1) is more appropriate for modeling one-step transformations (black curve in Figure 1), achieving fitting accuracy up to 99%. For two-step transformations, such as those in Ni-Ti alloys where the cubic B2 → metastable monoclinic B19′ transformation may proceed via the rhombohedral R phase, separate functions must be used for each step—one for B2 → R ad another for R → B19′. However, it is not suitable for two-step transformations, as it cannot capture the plateau between the R-phase finish temperature and the B19′-phase start temperature. In contrast, the Boltzmann Equation (1) has coefficients directly linked to specific physical parameters of the phase transformation process, including functional properties. This, for example, differs from the empirical coefficients C and n in the Paris equation for fatigue crack growth, which cannot be directly related to physical parameters such as crack opening displacement, applied stress magnitude, frequency, or temperature.
In this work we propose a methodology based on the sigmoidal Boltzmann function that enables the parametrization and modeling of the thermomechanical behavior of SMA elements under operational conditions (Figure 3).
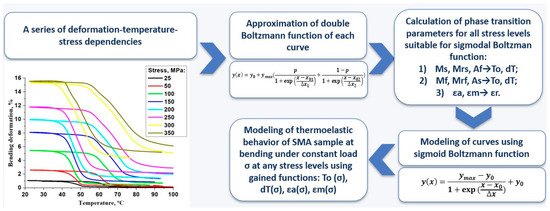
Figure 3.
Scheme for the parametrization of thermoelastic martensitic phase transformations in shape memory alloys under constant load.
To support the parametrization process, a specialized software was developed, based on deformation–temperature–stress test data to perform hysteresis curve parametrization. The double Boltzmann sigmoid function in Python 3.13 SciPy API command “curve_fit” was realized in a form that is similar to (2), because a “double Boltzmann function” typically refers to the sum of two Boltzmann sigmoid functions:
The accuracy of parametrization is in grate dependence form value of constant parameters from (3) and (4). If we express the experimental data as an array of the points (Ti, εi), β = (θ1, εA1, εM1, paramT01, dT1, θ2, εA2, εM2, paramT02, dT2) and εi(Ti, β), the defining β can be solved by means of regression analysis in such way that the predicted value ε*(Ti, β) is as close as possible to the experimental εi. This problem of optimization by regression analysis mathematically can be expressed as:
min_β ∑ (εi − ε*(Ti; β))2
This problem is solved using the method of least squares. In the code of the program this is implemented using the “scipy.optimize.curve_fit” library, which employs numerical algorithms such as Levenberg–Marquardt. Figure 4 for the Ni-Mn-Ga alloy restored from [25] demonstrates these parameters to clearly understand how the critical temperatures can be calculated.
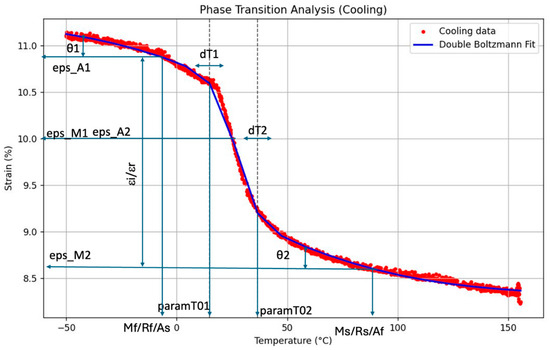
Figure 4.
The resulting approximation and parametrization of a thermoelastic martensite phase transition.
As a result of such parametrization, realization of the double Boltzmann equation in such a form leads to more accurate calculations of the critical temperatures of the phase transition.
3. Results and Discussion
The results of fitting of the curve are unifying for all such transitions in SMA, and values of parametrization of Equation (3) can be recalculated into functional properties of a martensite phase transition using the equations that follow. Further calculations to parametrize the material using sigmoid functions were transformed into equations containing parameters from [20] that are typical for martensite phase transitions at constant stress:
Martensite start temperature, R-phase start temperature, Austenite finish temperature:
Martensite finish temperature, R-phase finish temperature, Austenite start temperature:
Bending deformation in Austenite:
εa = εA1
Bending deformation in Martensite:
εm = εM2
Induced or recovered deformation
εi(εr) = εm − εa = εA1 − εM2
The fraction of optimization:
The results of calculations as an example for a specimen of NiMnGa alloy from [25] are presented on Figure 5.
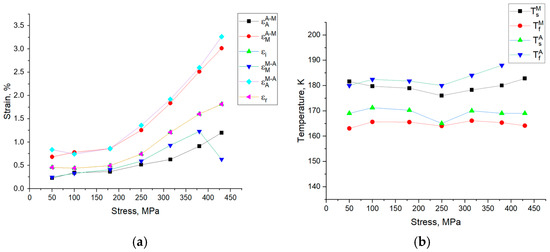
Figure 5.
The results of using a double Boltzmann sigmoid function to parametrize phase transformation in a Ni-Mn-Ga alloy adapted from [25]: (a) calculated characteristics of deformation parameters and (b) calculated temperatures of martensite phase transformation.
The universal Boltzmann-type equation proposed for parametrizing thermoelastic martensitic transformations at constant stress is given by:
where εM is the deformation in martensite, εA is the deformation in austenite, and the difference between εM, εA is the induced deformation in martensite or the recoverable deformation ; T refers to temperature, temperature T0 is a temperature when a material has a phase composition of 50% of a martensite phase and 50% of a parent austenite phase and dT is a section of phase transition when a nucleus of a new phase has just completely appeared and the old nucleus has not yet begun to disappear, according to a theory of diffuse martensite phase transitions.
Equation (11) illustrates the distinction between simple approximation and true parametrization. In conventional data approximation (e.g., [27,28,29,30]) fitting coefficients are purely mathematical and lack direct physical meaning [20,25]. In contrast, the parametrization approach proposed here interprets fitting coefficients as concrete mechanical or functional characteristics, as explained for (11). Figure 6 shows the parametrization results for a Ni-Ti-Cu ribbon sample under 405 MPa [36], using (11) and a double-sigmoid function.
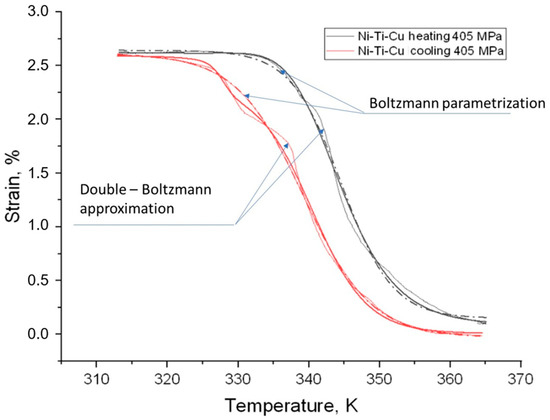
Figure 6.
Restored (dash-dotted for Boltzmann equation and thin line for double-Boltzmann) and original graph (fat line) of martensite phase transformation in Ni-Ti-Cu restored from [36] melt-spun ribbon at 405 MPa constant stress.
For two-step transformations—such as B2–R–B19′ and the reverse transformation, typical for Ni-Ti-Cu alloys—the single and double sigmoid functions achieve correlation coefficients as high as 0.99, which is demonstrated on Figure 6. Although the double-sigmoid function (2) and (3) provides a more accurate approximation of the transformation curve, its coefficients cannot be clearly associated with physical or functional parameters. Therefore, the classical single-sigmoid function is more suitable for further parametrization and for generalization to other SMA systems.
Notably, in the case when a transition has two steps, for example B2-R-B19 and backward, which is typical for Ni-Ti-Cu alloys, the sigmoid function and double sigmoid function has a 0.99 coefficient of correlation (see Figure 6). The double sigmoid function (2) and (3) better approximates the transformation curve and can be used for more accurate modeling of actuators based on SMA due to their work at constant load, but the coefficients of this equation can’t be clearly identified in terms of functional or mechanical properties; i.e., a classical sigmoid function is more suitable for further parametrization of other groups of SMA.
Further modeling based on the proposed parametrization was carried out for a Ni–Ti alloy system using data from Ref. [35], in accordance with the algorithm presented in Figure 3. The experimentally obtained deformation–temperature–stress dependencies together with the results of phase transformation modeling after parametrization are shown in Figure 7.
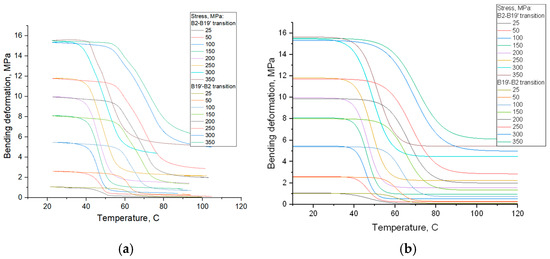
Figure 7.
Comparison of experimental deformation data (a) and the modeled response using the single-sigmoid Boltzmann function (b) for Ni-Ti alloy under varying constant stress levels adapted [35].
The original dependencies were divided into the forward B2 → B19′ and the reverse B19′ → B2 transformations. Each transformation was approximated using Equation (2), and the required metrics for modeling the transformations with Equation (11) were subsequently calculated based on the parametrization results. The dependence of the obtained parameters on the applied stress is shown in Figure 8.
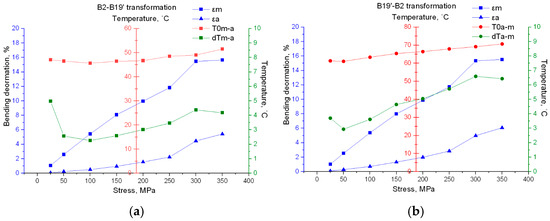
Figure 8.
Parameters of sigmoid equation for straight martensite transformation (a) and backward (b) martensite phase transformation in Ni-Ti adapted from [35] alloy at different levels of constant stress.
The plots in Figure 8 demonstrate the dependence of the parameters of the forward and reverse thermoelastic transformations on the applied stress level, expressed in terms of Equation (11). The deformation of the specimen in the B2 and B19′ phases follows a linear Hooke’s law relationship, which makes it possible to estimate the Young’s modulus. According to the present modeling, the Young’s modulus is approximately 55 GPa for the B2 phase and 28 GPa for the B19′ phase.
The dependence of the temperature interval corresponding to the stable growth of the martensitic or austenitic phase, dT, enables an evaluation of transformation kinetics as a function of the applied load. The modeling results indicate that an increase in stress by 10 MPa leads to an expansion of the dT interval by approximately 1.4 °C.
Similarly, changes in the equilibrium temperature T0 can be determined. Experimentally, the variation of T0 follows the Clausius–Clapeyron relationship, according to which an increase in external stress shifts the temperature of the onset of phase transformation and, consequently, the equilibrium temperature. When the values of reversible and accumulated deformation are known, this relationship also allows the calculation of the transformation enthalpy for both forward and reverse transformations.
Theoretical calculations related to martensitic transitions were performed by Malygin using the theory of vanishing phase transitions in shape memory alloys (SMAs) [37,38,39]. While classical Landau theory assumes an abrupt, step-like phase transition, the theory of vanishing phase transitions extends this framework by providing a theoretical explanation for the formation and kinetics of thermoelastic martensitic transformations. Notably, Malygin’s calculations lead to a sigmoidal functional relationship—consistent with the results of the present work—confirming the sigmoid function as one of the most promising mathematical descriptions of thermoelastic phase transitions.
4. Conclusions
In summary, the sigmoid function is proposed as a robust and physically meaningful tool for the strict parametrization of martensitic phase transformations in shape memory alloys (SMAs) under constant stress. While the double Boltzmann (double-sigmoid) function allows a more accurate reconstruction of the experimental curves, it primarily serves to improve the determination of the initial data required for calculating the parameters of Equation (11), as well as for a more precise identification of the start and end temperatures of phase transformation increments. In this sense it represents a more reliable alternative to the conventional tangent method widely used in the analysis of such transformation curves.
The application of the single-sigmoid function broadens the theoretical framework of diffuse martensitic transitions. Equation (11), used in combination with the temperature dependencies εA (T), εM (T), dT(T), and T0 (T), enables complete parametrization of both SMA materials and actuators.
Parametrization of thermoelastic martensitic transformations makes it possible to model the operational behavior of SMA elements under stress of any sign with a well-defined level of accuracy. This is achieved through the identified relationships between deformation in the high-temperature (austenitic) and low-temperature (martensitic) phases, the equilibrium temperature, and the temperature interval of transformation as functions of the applied stress.
The reliability of the proposed physical model for describing phase transformations is supported not only by direct experimental data but also by the theory of diffuse phase transitions. Consequently, this approach can be extended to other alloys exhibiting the shape memory effect.
This framework can therefore serve as a foundation for the development of digital twins of modern SMA-based devices and lead to more accurately qualifying the functional properties of the SMA.
Author Contributions
Conceptualization: M.A.O. and V.S.K.; Methodology: M.A.O., V.S.K., V.V.K. and I.S.L.; Investigation: M.A.O., M.G.F., K.D.A., A.V.N., G.K.S. and G.I.M.; Data curation: K.D.A., A.V.N. and G.K.S.; Formal analysis: M.G.F. and I.S.L.; Resources: V.V.K. and G.I.M.; Writing—original draft preparation: M.A.O. and V.S.K.; Writing—review and editing: All authors; Visualization: M.G.F. and K.D.A.; Supervision: V.S.K.; Project administration: V.S.K.; Funding acquisition: M.A.O., A.V.N. and V.V.K. All authors have read and agreed to the published version of the manuscript.
Funding
The work was funded by Moscow Polytechnic University under the P.L. Kapitsa Grant Program and partly carried out within the framework of the state tasks of Kotel’nikov Institute of Radioengineering and by a grant from the Russian Science Foundation, grant number: 25-19-00942, https://rscf.ru/en/project/25-19-00942/, accessed on 3 January 2026.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
Authors Matvey G. Fedin and Vladimir S. Kalashnikov were employed by the company LLC Keenetica. Author Kirill D. Aksenov was employed by the company LLC Predict Space. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Isaltschev, I.; Kaminsky, E.; Kurdjumov, G. Strain transformation in metastable beta copper-zinc and beta copper-Ti alloys. AIME Trans. 1938, 128, 337–368. [Google Scholar]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Petrini, L.; Migliavacca, F. Biomedical applications of shape memory alloys. J. Metall. 2011, 2011, 501483. [Google Scholar] [CrossRef]
- Tavares, S.M.O.; Gamboa, P.V.; de Castro, P.M.S.T. Aircraft Wings and Morphing—Evolution of the Concepts. Aerospace 2025, 5, 101. [Google Scholar] [CrossRef]
- Brailovski, V.; Terriault, P.; Georges, T.; Coutu, D. SMA actuators for morphing wings. Phys. Procedia 2010, 10, 197–203. [Google Scholar] [CrossRef]
- Balta, J.A.; Simpson, J.; Michaud, V.; Månson, J.-A.E.; Schrooten, J. Embedded shape memory alloys confer aerodynamic profile adaptivity. Smart Mater. Bull. 2001, 12, 8–12. [Google Scholar] [CrossRef]
- Bir, A. Investigation of design and effects of a morphing winglet by applying a shape-memory alloy material on a passenger aircraft. Eur. J. Sci. Technol. 2024, 53, 250–255. [Google Scholar] [CrossRef]
- Mani, R.; Lagoudas, D.C.; Rediniotis, O.K. Active skin for turbulent drag reduction. Smart Mater. Struct. 2008, 17, 035004. [Google Scholar] [CrossRef][Green Version]
- Walgren, P.; Bertagne, C.; Wescott, M.; Benafan, O.; Erickson, L.; Whitcomb, J.; Hartl, D. Development and testing of a shape memory alloy-driven composite morphing radiator. Shape Mem. Superelasticity 2018, 4, 232–241. [Google Scholar] [CrossRef]
- Carnier, F.; Villa, F.; Rigamonti, D.; Villa, E.; Di Landro, L.A.; Grande, A.M.; Bettini, P. Shape Memory Alloy Torsional Actuators Enabling Autonomous Thermal Control in Small Satellites. Aerospace 2025, 12, 1029. [Google Scholar] [CrossRef]
- Hao, S.; Moreno, I.; Gonzalez, D.; Magsumbol, K.; Potnuru, A. Autonomous, Nitinol-Actuated, Three-Way Splitter Valve for Spacecraft Thermal Management Systems. In Proceedings of the 2024 Regional Student Conferences (AIAA), Morgantown, WV, USA, 25–26 November 2024. [Google Scholar] [CrossRef]
- Gurusekaran, A.; de Souza Oliveira, H.; Benedetti, V.; Baratieri, M.; Münzenrieder, N.; Ciocca, M.; Lugli, P.L.; Petti, L. Autonomous shape memory hinge for space applications powered via solar energy. In Proceedings of the 2023 IEEE 10th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Milan, Italy, 19–21 June 2023; pp. 13–18. [Google Scholar] [CrossRef]
- Schmidt, J.; Sakovsky, M. Antagonistic Shape Memory Alloy Actuator Articulating a Reconfigurable Helical Antenna for Space Applications. In Proceedings of the AIAA SciTech 2025 Forum, Orlando, FL, USA, 6–10 January 2025. [Google Scholar] [CrossRef]
- Casey, N.; Kuznetsov, M.; Erickson, P.; Xanthopoulou, E. Active suspension utilizing shape memory alloys for lunar and martian vehicle explorers. In Proceedings of the 2024 Regional Student Conferences (AIAA), Morgantown, WV, USA, 12–13 April 2024. [Google Scholar] [CrossRef]
- Naghipour, P.; Padula, S.; Creager, C.; Oravec, H. Large-scale numerical models for shape memory Mars spring tires: Development and implementation. Shape Mem. Superelasticity 2024, 10, 341–355. [Google Scholar] [CrossRef]
- Rodrigue, H.; Bhandari, B.; Han, M.-W.; Ahn, S.-H. A shape memory alloy–based soft morphing actuator capable of pure twisting motion. J. Intell. Mater. Syst. Struct. 2015, 26, 1071–1078. [Google Scholar] [CrossRef]
- Song, Y.; Xu, S.; Sato, S.; Lee, I.; Xu, X.; Omori, T.; Nagasako, M.; Kawasaki, T.; Kiyanagi, R.; Harjo, S.; et al. A lightweight shape-memory alloy with superior temperature-fluctuation resistance. Nature 2025, 638, 965–971. [Google Scholar] [CrossRef]
- Jones, N.G.; Dye, D. Martensite evolution in a NiTi shape memory alloy when thermal cycling under an applied load. Intermetallics 2011, 19, 1348–1358. [Google Scholar] [CrossRef]
- Maletta, C.; Sgambitterra, E.; Furgiuele, F.; Casati, R.; Tuissi, A. Fatigue properties of a pseudoelastic NiTi alloy: Strain ratcheting and hysteresis under cyclic tensile loading. Int. J. Fatigue 2014, 66, 78–85. [Google Scholar] [CrossRef]
- Kalashnikov, V.S.; Koledov, V.V.; Kuchin, D.S.; Petrov, A.V.; Shavrov, V.G. A Three-Point Bending Test Machine for Studying the Thermomechanical Properties of Shape Memory Alloys. Instruments Exp. Tech. 2018, 61, 306. [Google Scholar] [CrossRef]
- Nargatti, K.; Ahankari, S. Advances in enhancing structural and functional fatigue resistance of superelastic NiTi shape memory alloy: A review. J. Intell. Mater. Syst. Struct. 2021, 33, 503–531. [Google Scholar] [CrossRef]
- Savi, M.A.; Paiva, A.; de Araujo, C.J.; de Paula, A.S. Dynamics of Smart Systems and Structures; Lopes Junior, V., Steffen, V., Jr., Savi, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 225–268. [Google Scholar] [CrossRef]
- Irzhak, A.V.; Kalashnikov, V.S.; Koledov, V.V.; Kuchin, D.S.; Lebedev, G.A.; Lega, P.V.; Pikhtin, N.A.; Tarasov, I.S.; Shavrov, V.G.; Shelyakov, A.V. Giant reversible deformations in a shape-memory composite material. J. Commun. Technol. Electron. 2010, 36, 329–332. [Google Scholar] [CrossRef]
- Lega, P.; Koledov, V.; Orlov, A.; Kuchin, D.; Frolov, A.; Shavrov, V.; Martynova, A.; Irzhak, A.; Shelyakov, A.; Sampath, V.; et al. Composite materials based on shape-memory Ti2NiCu alloy for frontier micro- and nanomechanical applications. Adv. Eng. Mater. 2017, 19, 1700154. [Google Scholar] [CrossRef]
- Kalashnikov, V.S.; Musabirov, I.I.; Koledov, V.V.; Andreev, V.A.; Gunderov, D.V.; Shavrov, V.G. Functional fatigue of Ni–Mn–Ga and Ni–Ti alloys with the shape memory effect in thermocycling conditions under a constant stress. Tech. Phys. 2020, 65, 578–583. [Google Scholar] [CrossRef]
- Romanov, S.R.; Koledov, V.V.; Kartsev, A.I.; Prokunin, A.V.; Rusakov, E.D. Study of tool actuation frequency on the basis of bimetallic microactuator. Phys. Met. Metallogr. 2024, 125, 1935–1939. [Google Scholar] [CrossRef]
- El Aferni, A.; Guettari, M.; Tajouri, T. Mathematical model of Boltzmann’s sigmoidal equation applicable to the spreading of the coronavirus (COVID-19) waves. Environ. Sci. Pollut. Res. 2021, 28, 40400–40408. [Google Scholar] [CrossRef]
- Fernandes, T.J.; Muniz, J.A.; Pereira, A.A.; Muniz, F.R.; Muianga, C.A. Parameterization effects in nonlinear models to describe growth curves. Acta Scientiarum. Technology 2015, 37, 397–402. [Google Scholar] [CrossRef]
- Reséndiz-Muñoz, J.; A Corona-Rivera, M.; Fernández-Muñoz, J.L.; Zapata-Torres, M.; Márquez-Herrera, A.; Ovando-Medina, V.M. Mathematical model of Boltzmann’s sigmoidal equation applicable to the set-up of the RF-magnetron co-sputtering in thin films deposition of BaxSr1-xTiO3. Bull. Mater. Sci. 2017, 40, 1043–1047. [Google Scholar] [CrossRef]
- Janssen, B.H.; Pillen, S.; Voet, N.B.M.; Heerschap, A.; van Engelen, B.G.M.; van Alfen, N. Quantitative muscle ultrasound versus quantitative magnetic resonance imaging in facioscapulohumeral dystrophy. Muscle Nerve 2014, 50, 968–975. [Google Scholar] [CrossRef] [PubMed]
- Paris, P.C.; Erdogan, F. A critical analysis of crack propagation laws. J. Basic Eng. 1963, 85, 528–533. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Gong, D. The interrelation of the parameters in the Paris equation of fatigue crack growth. Eng. Fract. Mech. 2012, 96, 500–509. [Google Scholar] [CrossRef]
- Musabirov, I.I.; Safarov, I.M.; Galeyev, R.M.; Afonichev, D.D.; Gaifullin, R.Y.; Kalashnikov, V.S.; Dilmieva, E.T.; Koledov, V.V.; Taskaev, S.V.; Mulyukov, R.R. Influence of Multi-Axial Isothermal Forging on the Stability of Martensitic Transformation in a Heusler Ni-Mn-Ga Alloy. Trans. Indian Inst. Met. 2021, 74, 2481–2489. [Google Scholar] [CrossRef]
- Kamantsev, A.P.; Koshkid’kO, Y.S.; Bykov, E.O.; Kalashnikov, V.S.; Koshelev, A.V.; Mashirov, A.V.; Musabirov, I.I.; Paukov, M.A.; Sokolovskiy, V.V. Magnetocaloric and Shape Memory Effects in the Mn2NiGa Heusler Alloy. Phys. Solid State 2020, 62, 815–820. [Google Scholar] [CrossRef]
- Kalashnikov, V.S.; Koledov, V.V.; Shavrov, V.G.; Andreev, V.A.; Nesolenov, A.V.; Kuchin, D.S.; Karelin, R.D. Functionalities of Ni–Ti shape memory alloys and their efficiency as event actuators of microelectromechanical systems. J. Commun. Technol. Electron. 2023, 68, 338–345. [Google Scholar] [CrossRef]
- Morozov, E.; Kuznetsov, D.; Kalashnikov, V.; Victor, K.; Shavrov, V. Thermoelastic Properties and Elastocaloric Effect in Rapidly Quenched Ribbons of Ti2NiCu Alloy in the Amorphous and Crystalline State. Crystals 2021, 11, 949. [Google Scholar] [CrossRef]
- Malygin, G.A. Analysis of magnetocaloric effect in ferromagnetic shape memory alloy crystals. Fiz. Tverd. Tela 2022, 64, 570–577. [Google Scholar] [CrossRef]
- Malygin, G.A. Diffuse martensitic transitions and the plasticity of crystals with a shape memory effect. Phys. Usp. 2001, 44, 173. [Google Scholar] [CrossRef]
- Malygin, G.A. Theory of magnetic shape memory effect and pseudoelastic deformation in Ni-Mn-Ga alloys. Phys. Solid State 2009, 51, 1694–1699. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.