
A Survey of Electromagnetic Influence on UAVs from an EHV Power Converter Stations and Possible Countermeasures



Abstract
1. Introduction
2. Electromagnetic Interference Characteristics of Converter Station to the Surrounding Environment
2.1. Electromagnetic Interference in Converter Station
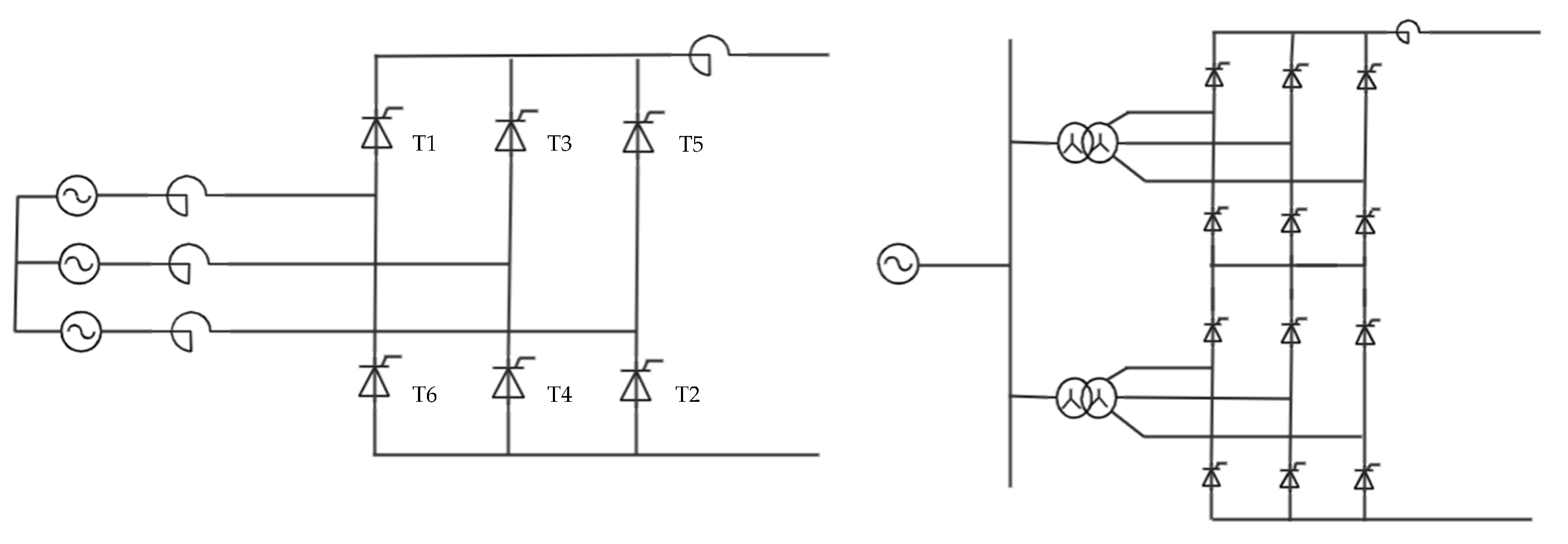
2.2. Analysis of Electromagnetic Interference from the Converter Valves
2.3. Analysis of Electromagnetic Interference of Other Equipment
3. The Impact of the Electromagnetic Interference on Drones
3.1. Influence of Electromagnetic Interference of Converter Station on UAV Communication
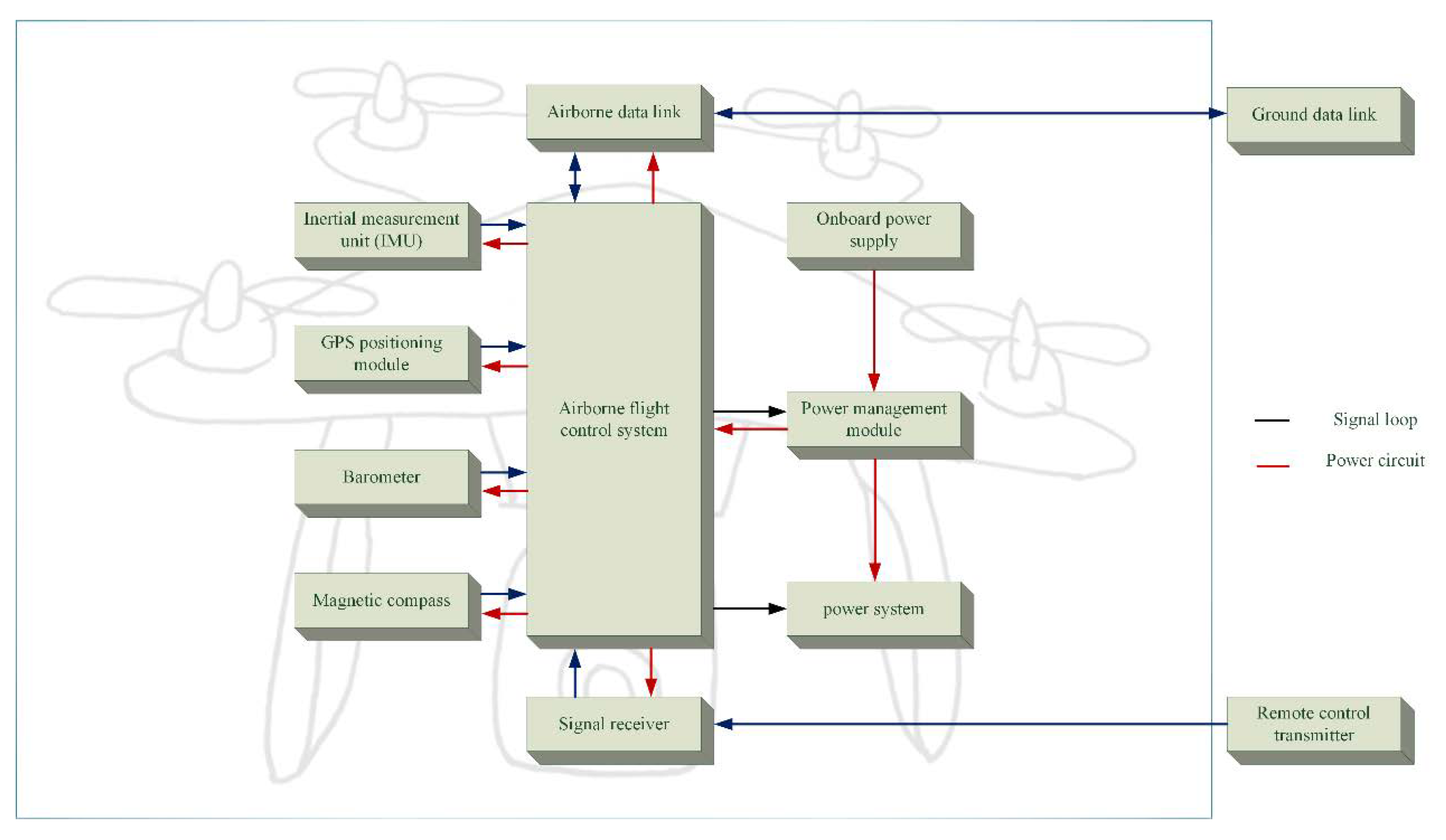
3.1.1. Impact on UAV Data Link Communication System
- The main remote-control antenna is the aircraft signal receiver. The antenna has the strongest signal receiving capability within the normal working frequency band of the UAV. Therefore, the same frequency interference can easily affect the demodulation of the digital circuit, resulting in an excessive bit error rate. It will receive interference signals with a certain energy, and the duplexer is the only way for interference current conduction, and its filtering attenuation ability directly affects the working state of the subsequent circuit.
- In order to carry more mission loads while satisfying the purpose of lightness of the fuselage, the fuselage of the UAV generally uses composite materials. Electromagnetic waves can easily pass through the fuselage shell and enter the cabin, which increases the complexity of the internal electromagnetic environment.
- In order to achieve the purpose of structural connection and ventilation, the surface of the fuselage has different degrees of holes, openings and other electrical unconnected parts, which are likely to cause electromagnetic leakage.
- Due to the limited power of the on-board backup battery, utility power is usually used during the near-field debugging of the drone, and the cable connection may introduce external interference.
3.1.2. Impact on UAV Navigation and Positioning System
3.2. Influence of Electromagnetic Interference of Converter Station on Electronic Circuit of UAV
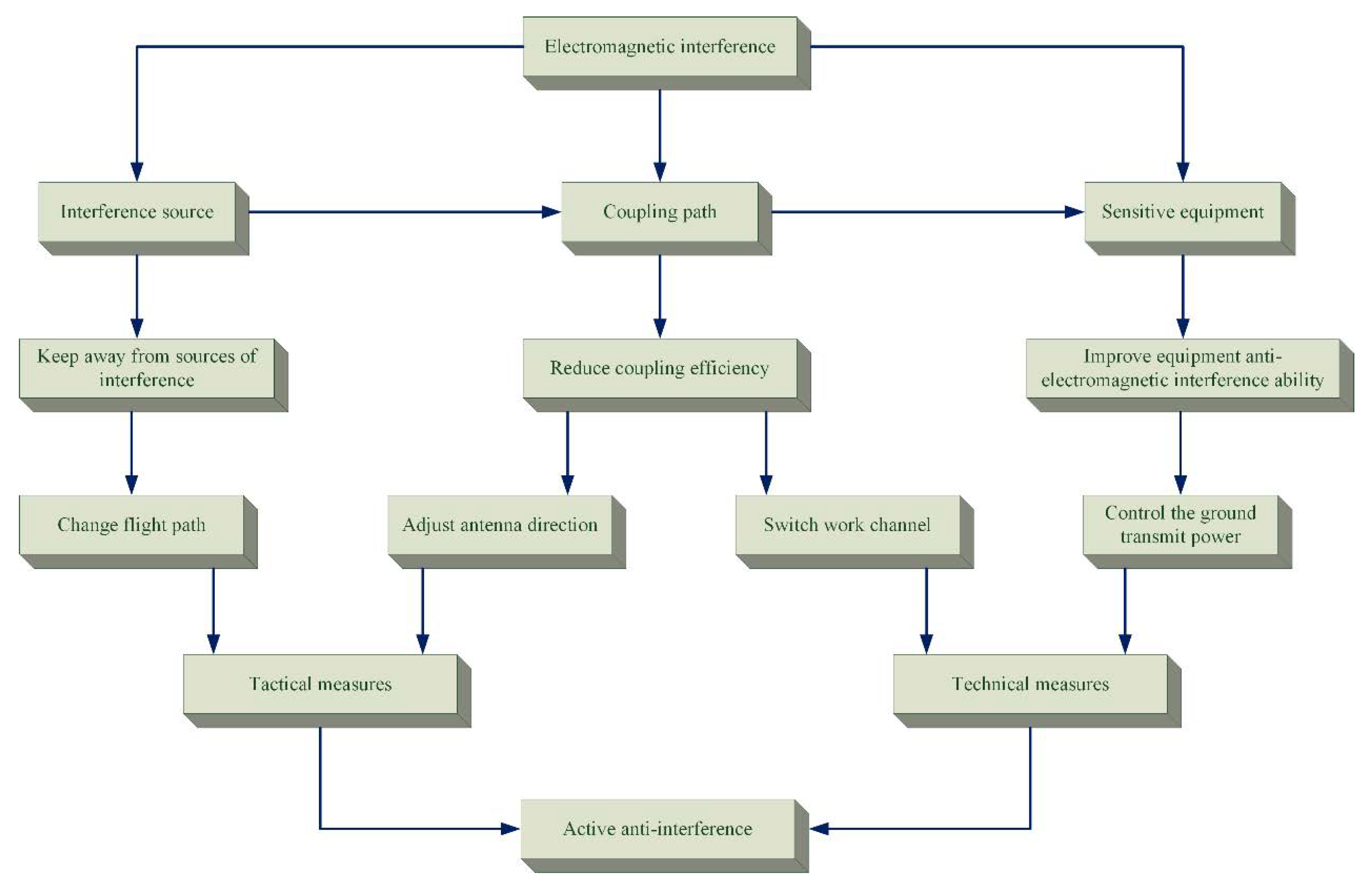
4. Method for UAV Electromagnetic Interference Suppression
4.1. Anti-Electromagnetic Interference Method of UAV Data Link
4.1.1. Anti-Jamming Technology to Improve Communication Reliability
4.1.2. Anti-Electromagnetic Interference Technology Based on Cooperative Communication
4.1.3. Anti-Jamming Technology Based on Cognitive Radio
4.1.4. UAV Electromagnetic Interference Adaptive Scheme
4.2. Anti-Electromagnetic Interference Method for UAV Hardware Equipment
4.2.1. Shield
4.2.2. Filter
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, W. Principles of Mobile Communication; Tsinghua University Press: Beijing, China, 2016. [Google Scholar]
- Zhang, L. Discussion on Influence of 110–220 kV Power Transmission and Transformation Facility on Electromagnetic Environment. Electr. Equip. 2008, 9, 56–58. [Google Scholar]
- Ma, W.; Nie, D.; Wan, B.; Zhang, X.; Xie, H. Characteristics of Electromagnetic Disturbance in HVDC Valve Hall. High Volt. Eng. 2008, 34, 1317–1323. [Google Scholar]
- Liu, L. Exploration on the influence of electromagnetic radiation on environment of Sanming Fuxing 220 kV substation expansion project. Straits Sci. 2020, 4, 50–52. [Google Scholar]
- Dong, D. Electromagnetic Disturbance of ±500 kV Converter Valve. Master’s Thesis, South China University of Technology, Guangzhou, China, 2012. [Google Scholar]
- Don’t “Despike” Your Signal Lines, Add a Resistor Instead. Available online: http://massmind.org/techref/electips.htm (accessed on 21 January 2014).
- Jiao, Y.; Hou, D.; Zhou, D.; Hu, T.; Lin, J.; Wang, Z. Efficiency evaluation of unmanned aerial vehicle in complex electromagnetic environment. Simul. Dyn. Electromagn. Interf. Environ. Unmanned Aer. Veh. Data Link 2014, 26, 136–141. [Google Scholar]
- Xuan, Y.; Tian, X.; Cheng, D.; Ju, X.; Wang, W. Analysis of the Battle Field Electromagnetic Interference on Unmanned Aerial Vehicle System. Equip. Environ. Eng. 2008, 1, 99–102. [Google Scholar]
- Sun, H.; Cui, X.; Du, L. Electromagnetic Interference Prediction of ± 800 kV UHVDC Converter Station. IEEE Trans. Magn. 2016, 52, 9400404. [Google Scholar] [CrossRef]
- Yang, W.; Wen, Y.; Meng, S.; Wang, J. Telemetry Performance Analysis of DS/FH Hybrid Spread Spectrum Signal. Telecommun. Eng. 2009, 49, 13–17. [Google Scholar]
- Kasten, D.G.; Caldecott, R.; Sebo, S.A.; Liu, Y. A computer program for HVDC converter station RF noise calculations. IEEE Trans. Power Deliv. 1994, 9, 750–756. [Google Scholar] [CrossRef]
- Kasten, D.G.; Liu, Y.; Caldecott, R.; Sebo, S.A. Radio frequency performance analysis of high voltage DC converter stations. In Proceedings of the 2001 IEEE Porto Power Tech Proceedings (Cat. No.01EX502), Porto, Portugal, 10–13 September 2001; IEEE: New York, NY, USA, 2001. [Google Scholar]
- Zhao, Z.; Cui, X.; Wang, Q. Analysis of Electromagnetic Disturbance from Valve Hall in Convert Station. High Volt. Eng. 2010, 3, 643–648. [Google Scholar]
- Xu, Z. Electromagnetic Compatibility Research of UHVDC Converter Station. Master’s Thesis, Guangxi University, Nanning, China, 2016. [Google Scholar]
- Qinghai-Henan ±800 kV UHV DC Transmission Project Energized. Available online: https://electricenergyonline.com/article/energy/category/t-d/56/848885/qinghai-henan-800kv-uhv-dc-transmission-project-energized.html (accessed on 12 August 2020).
- Li, B. Research on Some Key Problems in the Software Platform of UAV EMC Expert System. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2009. [Google Scholar]
- Zhang, D.; Chen, Y.; Cheng, E. Research on Dynamic Electromagnetic Susceptibility for Electromagnetic Interference Prediction of UAV Information Link. High Volt. Eng. 2019, 45, 665–672. [Google Scholar]
- Bekmezci, I.; Ozgur, K.S.; Şamil, T. Flying ad-hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Z.; Yao, C. A Hardware-in-Loop Simulation System for UAV Communication and Jamming Electromagnetic Environment. Telecommun. Eng. 2019, 59, 476–481. [Google Scholar]
- Kong, X.; Chen, W. Reliability Research of UAV Communication System in Complex Electromagnetic Environment. J. Artill. Acad. 2007, 27, 38–40. [Google Scholar]
- Namuduri, K. UAV Networks and Communications; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Hu, G.; Zhu, S.; Xie, B. Fractal Brownian Motion Model of Multipath Fading Channels. Acta Electron. Sin. 2003, 31, 8–12. [Google Scholar]
- Zhang, D.; Cheng, E.; Wan, H.; Zhou, X.; Chen, Y. Prediction of Electromagnetic Compatibility for Dynamic Datalink of UAV. IEEE Trans. Electromagn. Compat. 2019, 61, 1474–1482. [Google Scholar] [CrossRef]
- Xu, L. Study on Test Method of Long Stator Linear Synchronous Motor. Master’s Thesis, Zhejiang University, Hangzhou, China, 2007. [Google Scholar]
- Yang, Z. Hazards of electromagnetic interference and EMC design. Auto Time 2015, 9, 88–91. [Google Scholar]
- Qian, Z.; Chen, H. State of Art of Electromagnetic Compatibility Research on Power Electronic Equipment. Trans. China Electrotech. Soc. 2007, 22, 1–11. [Google Scholar]
- Qi, C. Research on the Application of Wireless Sensor Network Based on ZigBee in Monitoring System. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2014. [Google Scholar]
- Li, H. Inspection of Radiation Disturbance and Radiation Immunity of UAV. Master’s Thesis, Heilongjiang University, Harbin, China, 2017. [Google Scholar]
- Wang, J.; He, W. Relationship between the Electric Field on the Surface of Insulators and Ultra-Violet Pulse Intensity and Its Application in Detecting Faulty Insulators. Trans. China Electrotech. Soc. 2008, 23, 137–142. [Google Scholar]
- Meng, X. Research on Electromagnetic Wave Monitoring Technology of Insulator Discharge in Transmission Line. Master’s Thesis, North China Electric Power University, Beijing, China, 2007. [Google Scholar]
- Tang, Z. Design and Simulation of UAVs Power Patrol System. Master’s Thesis, Guangdong University of Technology, Guangzhou, China, 2017. [Google Scholar]
- Liu, S.; Zhu, L. Research on Long-range Detection Technology for Corona Discharge Radiation Signal. High Volt. Eng. 2013, 39, 2845–2851. [Google Scholar]
- Chen, A.; Chen, C. Co-channel Interference and its Restraining Measures in Co-frequency Simulcast Systems. Telecommun. Eng. 2009, 49, 18–22. [Google Scholar]
- Qiao, Z.; Pan, X.; He, Y. Damage of high power electromagnetic pulse to unmanned aerial vehicles. High Power Laser Part. Beams 2017, 29, 61–66. [Google Scholar]
- Wu, R.; Zhang, H.; Zhong, T. Research on high power microwave weapon against UAV. Aerodyn. Missile J. 2015, 11, 36–39. [Google Scholar]
- Zhang, J.; He, Y.; Pan, X. Vulnerability Analysis of UAV Against Mesoband Electromagnetic Pulse. J. Proj. Rocket. Missiles Guid. 2020, 40, 110–115. [Google Scholar]
- Liu, P.; Ding, L. Electromagnetic Environmental Effects; Zhang, L., Ed.; Science Press: Beijing, China, 2018; pp. 20–24. [Google Scholar]
- Taylor, C.D.; Satterwhite, R.S.; Charles, W.H. The Response of Terminated Two-Wire Transmission Line Excited by Nonuniform Electromagnetic Field; Sandia Corporation: Albuquerque, NM, USA, 1965. [Google Scholar]
- Sun, Y.; Li, L.; Wang, W. Discussion on the Safety Engineering of UAV in UHV Transmission Line Routing Inspection. Shandong Electr. Power 2017, 44, 15–19. [Google Scholar]
- Zhang, X.; Wang, X.; Wei, Y. Research of Security Strategy of UAV Board Data link. Comput. Secur. 2008, 3, 62–64. [Google Scholar]
- Gans, M.J.; Borle, K.M.; Chen, B.; Freeland, T.; McCarthy, D.; Nelson, R.; Oleski, P. Enhancing connectivity of unmanned vehicles through MIMO communications. In Proceedings of the 2013 IEEE 78th Vehicular Technology Conference: VTC2013-Fall, Las Vegas, NV, USA, 2–5 September 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Su, W.; Matyjas, J.D.; Gans, M.J.; Batalama, S. Maximum achievable capacity in airborne MIMO communications with arbitrary alignments of Linear transceiver antenna arrays. IEEE Trans. Wirel. Commun. 2013, 12, 5584–5593. [Google Scholar] [CrossRef]
- Wang, P. Design of Key Blocks of a High Speed DS/FH Communication System for UAVs. J. Spacecr. TT&C Technol. 2016, 49, 41–44. [Google Scholar]
- Ding, D.; Liu, M. Realization of a High Efficient Anti-jamming UAV TT&C Channel. Telecommun. Eng. 2009, 49, 41–44. [Google Scholar]
- Guo, S.; Guo, D.; Zhang, Q.; Wu, N.; Deng, J. Research Progress of Anti-jamming Technology of Unmanned Aerial Vehicle (UAV) Data Link. In Proceedings of the 2020 the 3rd International Conference on Aeronautical, Aerospace and Mechanical Engineering (AAME 2020), Sanya, China, 16–18 February 2020; IOP: Bristol, UK, 2020. [Google Scholar]
- He, Y.; Zhai, D.; Zhang, R.; Du, X.; Guizani, M. An Anti-Interference Scheme for UAV Data Links in Air-Ground Integrated Vehicular Networks. Sensors 2019, 19, 4742. [Google Scholar] [CrossRef]
- Qing, L. Non-cooperative Game Power Control in Swarm UAV Networks. Telecommun. Eng. 2019, 59, 786–791. [Google Scholar]
- Li, J.; Zhou, Y.; Lamont, L. Communication architectures and protocols for networking unmanned aerial vehicles. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Cheng, B.N.; Charland, R.; Christensen, P.; Veytser, L.; Wheeler, J. Evaluation of a multihop airborne IP backbone with heterogeneous radio technologies. IEEE Trans. Mob. Comput. 2014, 13, 299–310. [Google Scholar] [CrossRef]
- Gomez, K.; Rasheed, T.; Reynaud, L.; Kandeepan, S. On the performance of aerial LTE base-stations for public safety and emergency recovery. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802. 11a-based UAV-to-ground links. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Ribeiro, A.; Wang, R.; Giannakis, G.B. Multi-source cooperation with full-diversity spectral-efficiency and controllable-complexity. IEEE J. Sel. Areas Commun. 2007, 25, 415–425. [Google Scholar] [CrossRef]
- Ribeiro, A.; Sidiropoulos, N.D.; Giannakis, G.B.; Yu, Y. Achieving wireline random access throughput in wireless networking via user cooperation. IEEE Trans. Inf. Theory 2007, 53, 732–758. [Google Scholar] [CrossRef]
- Fei, L.; Gao, Q.; Zhang, J.; Xu, Q. Relay selection with outdated channel state information in cooperative communication systems. IET Commun. 2013, 7, 1557–1565. [Google Scholar] [CrossRef]
- Fei, L.; Zhang, J.; Gao, Q.; Peng, X.H. Outage-optimal relay strategy under outdated channel state information in decode-and-forward cooperative communication systems. IET Commun. 2015, 9, 441–450. [Google Scholar] [CrossRef]
- Introduction of RTP EMI Shielding Material Properties. Available online: http://web.rtpcompany.com/cn/products/shielding/control.htm (accessed on 5 March 2021).
- Radio Frequency Interference at the Geostationary Orbit. Available online: https://ntrs.nasa.gov/api/citations/19810018807/downloads/19810018807.pdf (accessed on 15 June 1981).
- Radio Frequency Interference—And What to Do About It. Available online: http://www.radiosky.com/journal0901.html (accessed on 21 January 2014).
- Lab Note #103 Snubbers—Are They Arc Suppressors. Available online: https://arcsuppressiontechnologies.com/images/1_LN103rvC.pdf (accessed on 5 February 2012).
- Lab Note #105 EMI Reduction—Unsuppressed vs. Suppressed. Available online: https://www.arcsuppressiontechnologies.com/wp-content/uploads/2016/07/Arc_Supression_Lab_Note_105_Contact_Life.pdf (accessed on 5 February 2012).
- Integrated Circuit EMC. Available online: https://cecas.clemson.edu/cvel/emc/ic_emc/ic.html (accessed on 21 January 2014).
- Zhang, W.; Ding, W.; Liu, C. Prediction of interference effect on UAV data link in complex environment. Syst. Eng. Electron. 2016, 38, 760–766. [Google Scholar]
- Reyes, H.; Gellerman, N.; Kaabouch, N. A cognitive radio system for improving the reliability and security of UAS/UAV networks. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Chen, Z.; Jiang, T.; Fan, J. Architecture of UAV Intelligent Data Link System. Radio Eng. China 2009, 39, 4–6. [Google Scholar]
- Huang, W.; Ding, W.; Liu, C. Multi-parametric programming approach for data link of UAS based on state machine. In Proceedings of the 2015 International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Liu, Y.; Piao, H.; Xiao, L. An Overview of Anti-Interference Techniques for UCAV Data Link. Aircr. Des. 2017, 36, 13–16. [Google Scholar]
- Zhang, D.; Chen, Y.; Cheng, E. A New Method for UAV’s Datalink Adaptive to EMI. Trans. Beijing Inst. Technol. 2020, 40, 880–887. [Google Scholar]
- Zhang, D.; Chen, Y.; Cheng, E. Effects of Electromagnetic Interference (EMI) on Information Link of UAV. Trans. Beijing Inst. Technol. 2019, 39, 756–762. [Google Scholar]
- Huang, B.; Zhang, G.; Wan, X. Research on Anti Electromagnetic Interference Method in the Power Series Compensation Device of UAV Inspection. North China Electr. Power 2016, 5, 44–48. [Google Scholar]
- Alcohol-Soluble Electromagnetic Wave Shielding Coating. Available online: https://patents.google.com/patent/CN101880499B/zh (accessed on 22 April 2010).
- Chung, D.D.L. Carbon materials for structural self-sensing, electromagnetic shielding and thermal interfacing. Carbon 2012, 50, 3342–3353. [Google Scholar] [CrossRef]
- Chen, L.; Yin, X.; Fan, X.; Chen, M.; Ma, X.; Cheng, L.; Zhang, L. Mechanical and electromagnetic shielding properties of carbon fiber reinforced silicon carbide matrix composites. Carbon 2015, 95, 10–19. [Google Scholar] [CrossRef]
- Zhan, Y.; Long, Z.; Wan, X.; Zhang, J.; He, S.; He, Y. 3D carbon fiber mats/nano-Fe3O4 hybrid material with high electromagnetic shielding performance. Appl. Surf. Sci. 2018, 444, 710–720. [Google Scholar] [CrossRef]
- Jia, Y.; Li, K.; Xue, L.; Ren, J.; Zhang, S.; Li, H. Mechanical and electromagnetic shielding performance of carbon fiber reinforced multilayered (PyC-SiC) n matrix composites. Carbon 2017, 111, 299–308. [Google Scholar] [CrossRef]
- Tanabe, S.; Murata, Y.; Chishaki, H.; Shimato, T. 3D-MoM analysis of radio frequency noise radiation from HVDC converter station. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No.02TH8579), Osaka, Japan, 2–5 April 2002; IEEE: New York, NY, USA, 2002. [Google Scholar]
- Zhang, D.; Chen, Y.; Xiao, X. Analysis of Mechanism of Electromagnetic Interference on UAV’s Main Telecontrol System. J. Microwaves 2016, 32, 94–100. [Google Scholar]
- Jiang, A.; Chen, M.; Huang, X. Discussion on anti-electromagnetic interference technology and solution. A & S 2012, 9, 150–151. [Google Scholar]
- Chen, Y.; Zhang, D.; Cheng, E.; Wang, X. Investigation on susceptibility of UAV to radiated IEMI. In Proceedings of the 2018 IEEE International Symposium on Electromagnetic Compatibility and 2018 IEEE Asia-Pacific Symposium on Electromagnetic Compatibility (EMC/APEMC)Electromagnetic Compatibility (EMC/APEMC), Singapore, 14–18 May 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source of Electromagnetic Interference | Electromagnetic Coupling Approach | ||
|---|---|---|---|
| In the system | UAV power ignition device | Power port | |
| Airborne measurement and control launch equipment | Digital signal port | ||
| Low frequency analog signal port | |||
| Radio frequency port | |||
| Actuating device and equipment with large current changes and intermittent contacts | Power port | ||
| High current inverter power supply and switching power supply | Power port | ||
| High-IF digital circuit and mission load with similar circuit structure and radio transmission | Digital signal port | ||
| Radio frequency port | |||
| Out of the system | Natural electromagnetic phenomenon (high altitude) | Atmospheric noise | |
| Cosmic radiation | |||
| Man-made electromagnetic phenomena (low altitude) | Various electromagnetic fields intentionally generated by radio transmitters, and additional electromagnetic fields generated by these transmitters and other technical equipment | ||
| Module | Function |
|---|---|
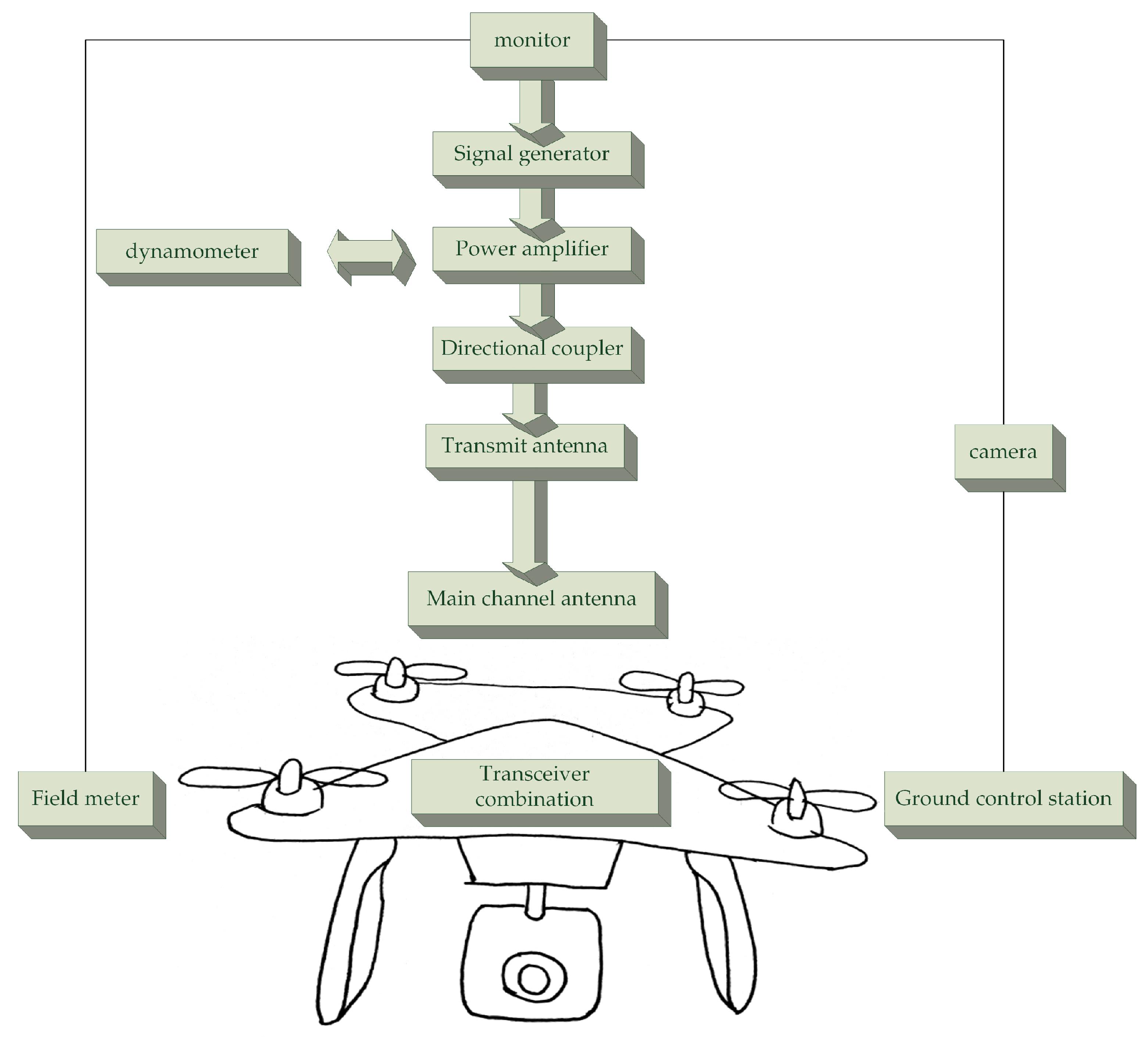
| Continuous wave radiation emission system | Launch an electromagnetic wave with adjustable parameters to the subject to radiatly interfere with the UAV data link |
| Subject (the tested UAV) | Place in an open area during normal work, and check the working status under interference |
| Dynamic monitoring system | Monitor the ground control station’s telemetry display window to report information, and use the “lost lock” phenomenon as the evaluation criterion for continuous wave electromagnetic interference on the data link. The loss of the main uplink channel means that the ground control station cannot send control commands to the drone and the aircraft is out of control, If the downlink telemetry link loses lock at this time, the drone will completely disappear from the ground control station’s “view” |
| Damage Mode | Damage Process | Damage Result |
|---|---|---|
| instantaneous interference | The low coupling power is equivalent to adding noise or interference signals to the system. | Affect the normal operation of electronic components. |
| high voltage breakdown | The electromagnetic energy coupled into the electronic components is converted into high voltage and high current. | Electrical breakdown occurred in electronic components. |
| device burnout | Pneumatic heating causes the component surface temperature to rise sharply, and the surface material produces a series of complex physical and chemical changes. | Ablation of semiconductor devices or fusing of wires, etc. |
| microwave heating | The electromagnetic pulse heats the device temperature to exceed the temperature limit of normal operation. | The device is malfunctioning. |
| The Research Direction | Network Layer |
|---|---|
| Integration and performance evaluation of low-power MIMO systems [32,33]. | Physical layer |
| Research and application of anti-jamming technology represented by spread spectrum and frequency hopping technology [43,44,45,46,47]. | Link layer |
| Under the limitation of limited spectrum resources, design high-throughput, high-reliability physical layer and MAC layer protocols and strategies [34,35]. | Physical layer |
| Integration of UAV data link system and satellite communication system, as well as other wireless communication systems [36,37]. | Physical layer |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ding, Q.; Li, K.; Valtchev, S.; Li, S.; Yin, L. A Survey of Electromagnetic Influence on UAVs from an EHV Power Converter Stations and Possible Countermeasures. Electronics 2021, 10, 701. https://doi.org/10.3390/electronics10060701
Li Y, Ding Q, Li K, Valtchev S, Li S, Yin L. A Survey of Electromagnetic Influence on UAVs from an EHV Power Converter Stations and Possible Countermeasures. Electronics. 2021; 10(6):701. https://doi.org/10.3390/electronics10060701
Chicago/Turabian StyleLi, Yanchu, Qingqing Ding, Keyue Li, Stanimir Valtchev, Shufang Li, and Liang Yin. 2021. "A Survey of Electromagnetic Influence on UAVs from an EHV Power Converter Stations and Possible Countermeasures" Electronics 10, no. 6: 701. https://doi.org/10.3390/electronics10060701
APA StyleLi, Y., Ding, Q., Li, K., Valtchev, S., Li, S., & Yin, L. (2021). A Survey of Electromagnetic Influence on UAVs from an EHV Power Converter Stations and Possible Countermeasures. Electronics, 10(6), 701. https://doi.org/10.3390/electronics10060701