Abstract
This study suggests a control Lyapunov-based optimal integral terminal sliding mode control (ITSMC) technique for tracker design of asymmetric nonholonomic robotic systems in the existence of external disturbances. The design procedure is based on the control Lyapunov function (CLF) approach. Hence, the output tracking problem is solved by combining the ITSMC with optimal control. The CLF synthesizes a nonlinear optimal control input for the nominal system. Once the control system’s states lie far away from the operating point, it is activated to drive them toward the equilibrium point optimally. However, on the condition that the system perturbations are the main factor, the ITSMC would be designed to take over in the vicinity of the equilibrium point. Accordingly, the control goals, such as robustness and precise control, are warranted in the perturbed system. The usefulness of the suggested method is demonstrated with a wheeled mobile robot via a simulation study.
1. Introduction
Nonholonomic systems, such as wheeled mobile robots, are typically characterized by nonlinear differential equations with nonintegrable constraints on their velocities [1]. They are commonly encountered in mechanical and engineering problems with additional conditions constraining and restricting their motion. The stimulating instances of the nonholonomic systems contain tricycle-type mobile robots, surface vessels, rigid spacecrafts, cars pulling several trailers, a knife-edge structure, a vertical rolling wheel, etc. Designing feedback controls for nonholonomic robotic systems would be a challenging task. This is because of the fact that these dynamical/mechanical systems cannot be stabilized by any continuous feedback control, are not globally feedback linearizable, and suffer from the singularity manifold problem in the neighborhood around the origin. The optimal tracking control problem is mainly concerned with finding the best possible strategy to track the reference trajectory by the system output’s system, which results in minimizing or maximizing a particular performance index [2]. Optimal control design schemes are typically developed with two different points of view: the maximum principle of Pontryagin and Bellman’s dynamic programming, which finally solves the Hamilton–Jacobi–Bellman (HJB) problem. Generally, the HJB condition does not have a smooth solution. In the past half-century, many studies have shown that solving the HJB equation is equivalent to providing a method to solve Hamiltonian systems or the Riccati equation. There are many works in nonlinear control that are based on too many simplifying assumptions [3] or using series other than iterative processes, such as the Chebyshev technique [4], power series [5], Walsh functions [6], and so on. These methods are approximate and based on an initial guess, which is restricted to stabilize the nonlinear systems [7,8].
Sliding mode control (SMC) has been mostly considered in the control issue of dynamical systems subjected to uncertainties and disturbances [9,10,11,12]. The difficulty in the control of nonholonomic systems, for instance, nonholonomic mobile robots, is that there are external disturbances and parameter uncertainties in their modeling in the real world. By considering the essential characteristics of the wheeled mobile robots, such as actual dynamics, localization errors, inertia restrictions, and power limits of input actuators, the dynamical equations of these nonlinear systems are described as challenging mathematical models. Moreover, external disturbances such as wind gusts or gravity have strong effects on the system and are required to be taken into account in the controller design; however, it is not possible to exactly measure the external disturbances. Despite the uncertain terms and external disturbances, the SMC can be a powerful and robust control technique that provides the desired performance [13,14,15]. The conventional SMC does not assure the state’s convergence to a closed-loop system in finite time. Hence, for achieving the mentioned property, the terminal sliding mode (TSM) control methodology has been presented and applied to numerous applications [16,17,18]. The easiness implementation, converging in finite time, and tracking with high precision, would be superior features of the TSM method. The optimal sliding mode control (OSMC) consists of the optimal control concept and the SMC strategies to design an integral sliding manifold [19,20], where the sliding surface consists of an integral part. The system’s robustness against uncertainties would be guaranteed utilizing an integral sliding mode (ISM) controller [21]. It can be shown that the optimal controller design problem is equivalent to finding the HJB solution [22]. However, in nonlinear dynamical systems, the HJB equation may be difficult or impossible to solve. Basically, Sontag’s formula [23] applies the directional information provided with a CLF and then adjusts it satisfactorily to solve the HJB problem. Even though the SMC idea and the optimal control are some external control approaches, it is still possible to combine them. The cooperated control system would operate in such a way to satisfy the following: (1) in the zone where the nominal part of the dynamical system is dominant, the system response is particularly affected by optimal control; (2) the control task will be performed through the TSM in the case that the variations become dominant. Specifically, such an integrated control technique would be beneficial when the external disturbance is considerably near to the equilibrium point. Moreover, the nominal part of the dynamical system may be described by some radially unbounded functions concerning the state vector [24]. A main drawback of the TSM, however, is the chattering phenomenon, which has the potential to degrade the system performance. This can be mitigated by using smooth dynamics within the boundary layer.
To the best of our knowledge, none of the traditional literature has combined integral TSM with optimal control techniques for designing tracking control law in asymmetric, nonholonomic robotic systems. Thus, in this study, a disturbed third-order asymmetric nonholonomic robotic system is taken in chained form. Then, an optimal integral TSM control policy is presented. Hence, the chief novelties of the current research are itemized as:
- -
- Optimal control and integral terminal SLC are combined to design output regulators for a class of asymmetric nonholonomic robotic systems in an optimal sense.
- -
- A design that guarantees both robustness against modelled and unmodelled disturbances and optimizes performance.
- -
- A control synthesis that assures the SMC’s existence around the switching manifold in finite time while eliminating the chattering problem.
The residue of the current research is structured as follows: Section 2 articulates the problem description and assumptions. The main control approach is derived in Section 3. Simulation outcomes demonstrating the performance of the planned approach are given in Section 4. Some concluding remarks are presented in the last section.
2. Problem Formulation
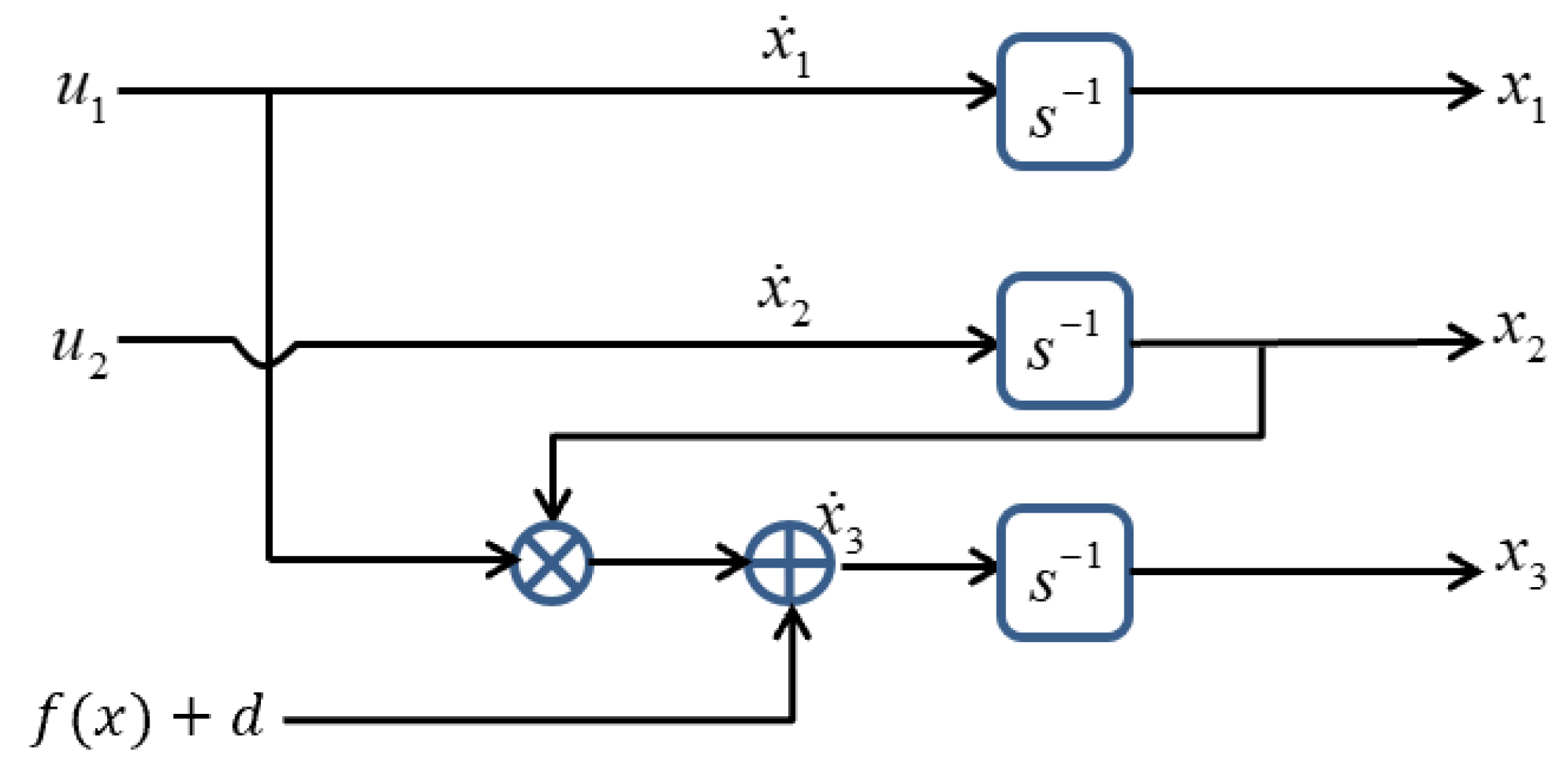
In chained form, the third-order asymmetric nonholonomic robotic system is considered as follows:
The vector signifies the state’s variables, describe the input signals, is the external disturbance, are the nominal terms of the system and . The nonholonomic model (1) is the third-order equation (with some changes) of the chained-form n-dimensional nonholonomic system, which is described in [25]. The schematic view of the third-order asymmetric nonholonomic system is illustrated in Figure 1. The nonholonomic systems have nonintegrable constraints (see the survey paper [26] and references therein for the introductory examples). The main problem for the asymptotical stability of nonholonomic structures is the uncontrollability of their first-order approximation and non-existence of the smooth (or even continuous) state-feedback controller [27,28].
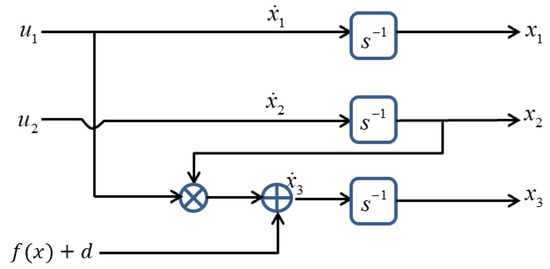
Figure 1.
Three-order nonholonomic system.
Assumption 1.
It is assumed that the external disturbance (d) and its time derivative () are bounded functions, and their upper bounds are known.
Suppose that the vector contains some desired responses and is found utilizing the following differential equations [29]:
The variables and are the input signals of the reference model. Let us define the tracking error as . Then, the error equations are found as:
The main control aim is to synthesize an optimal and robust tracking control law for the asymmetric nonholonomic robotic system (1).
3. Controller Design
The proposed design procedure entails three stages: (i) synthesizing an optimal controller law for the nominal dynamical system, (ii) in the existence of exterior disturbances, an ITSM control law is designed to ensure robustness, and (iii) combining the controllers of (i) and (ii). The overall control input can be written as:
where is the optimal control input aiming at stabilizing the nominal system, and is the ITSMC law synthesized to ensure the system’s robust performance under the disturbances.
- (A)
- Optimal control law design
Define the performance criterion as:
where is a positive semi-definite continuously differentiable function, and is zero-state detectable, with the desired solution as a state-feedback control input. Neglecting the external disturbances in (1) yields:
where are the states, and the vector function has continuous partial derivatives regarding . It is assumed that the pair is zero-state detectable. So, one can select a CLF to stabilize the nonlinear system and then synthesize a feedback controller , where the time-derivative of the CLF is a negative-definite function.
The presence of a suitable Lyapunov function for the nonlinear system (6) is a necessary/sufficient condition for the satisfaction of the stability of the system. For stabilization of the nonlinear system (6), it is required to choose a Lyapunov function first and then attempt a feedback control law such that it makes the time-derivative of the Lyapunov function negative definite. The Lyapunov stability satisfies the stability of the nonlinear system without control inputs, and it is employed for the closed-loop control systems. However, the notion of the CLF controller is to find a Lyapunov candidate function for the open-loop system and then design a feedback control loop that constructs the Lyapunov derivative negative. If one can find a suitable CLF, then it is also possible to design an appropriate stabilizer for the nonlinear system.
In the nonlinear system, the CLF-based controller is synthesized by choosing a Lyapunov function. Then, a feedback law is found in such a way that the time-derivative of the Lyapunov candidate becomes a negative one [30]. Accordingly, a stabilizing control input would be designed when one can find a CLF. Considering the Lyapunov function as a positive-definite and radially unbounded function, the time derivative of along with the system dynamics (6) is expressed as:
where , and is the Lie derivative operator. The function is a CLF for any , if yields .
Using the standard converse theorem, one can conclude that if (6) is stabilizable, a CLF exists. Moreover, if a CLF exists for the system (6), an asymptotically stabilizing controller that stabilizes (6) also exists. For such a nonlinear system, Sontag [16] proposed a CLF-based controller as follows:
with and
Theorem 1.
The control input(8) stabilizes the nominal parts of the nonholonomic system (6) and minimizes the performance criterion (5).
Proof.
Define the HJB equation [31]:
where would be a solution of the HJB equation, with:
The following optimal control law can be defined [19] if a continuously differentiable and positive-definite solution exists for the HJB equation (11):
Defining a scalar function such that yields the optimal control law:
Note that can be specified by substituting in (11):
Solving (15) and using (9) and (10) yields:
Substituting (16) into (14) yields the control law , defined by:
Then, the control law is equal to the optimal controller presented in Sontag’s formula (8). Thereby, minimizes the performance index (5). □
Remark 1.
Considering (7) and replacingby (8), using the CLF property, i.e.,when, it can be determined thatis negative for. On the other hand, for, one can obtain from (7) and (8) that:
Thus, it is verified that the control law (8) minimizes the criterion (5) and stabilizes the nominal system (6).
Remark 2.
A necessary condition for CLF-based optimal control design is the full knowledge about the system under consideration. Thus, the effectiveness of the optimal controller degrades when systems are affected by perturbations in the vicinity of the equilibrium.
To circumvent this problem, one can combine the aforementioned optimal control design with an SMC approach to guarantee robustness under external disturbances.
- (B)
- ITSMC control design
In what follows, we propose suppressing the disturbances affecting the nonlinear system (1) via an ITSMC design and then incorporating both control inputs into a switching controller.
We define the recursive TSM structure as
The constants and , and are some positive odd integers. The terms ’s are the TSM surfaces.
Taking the time derivative of , we have:
Thus, the finite-time convergence property of the TSM implies that the switching surfaces , , and would reach zero in finite time. Considering the reachability condition of a conventional ISM, one has
where and the function are defined as:
and using (20) and (21), it yields:
The existence of the sign function in the switching controller implies that the chattering phenomenon is unavoidable. One way to circumvent this problem is by considering the nonsingular terminal sliding manifold [32,33]:
where and with are positive odd integers, is the positive switching gain and is the integral sliding surface. Using (20), one obtains:
where . An improved reaching condition for the nonsingular terminal sliding manifold is proposed as follows:
where and .
Computing the derivative of the terminal sliding surface (24) gives:
From the positiveness of the odd parameters and , it can be shown that:
Furthermore, from (27) and (28), the term in (27) can be replaced by the new positive variable for . Hence, Equation (27) can be written as:
Equaling the values of from (26) and (29) can be expressed as:
where and and is a parameter selected to define the convergence rate of the sliding surface. Then, Equation (30) can be rewritten as:
Differentiating (25) with respect to time gives rise to:
Using (31) and (32) yields the following switching controls:
where .
Theorem 2.
The finite-time convergence of the nonlinear system (1) would be ensured by selecting the terminal sliding manifold (24) and designing the control law:
where and are defined as
with .
Proof.
In order to prove the convergence of the nonsingular terminal sliding manifold , the Lyapunov candidate function is defined as:
Differentiating yields:
Substituting (27) and (32) into (38) yields:
From (33), one can obtain:
whereas and , it follows that for any and only for . Hence, it is concluded from (40) that:
where , and . Thus, it is confirmed that the terminal sliding manifold would be converged to zero in finite time for any initial condition. Subsequently, the tracking error convergence to the origin would be guaranteed in finite time for the nonlinear system (1). □
4. Computer Simulations
Wheeled mobile robots are progressively used in industrial robotic systems, especially when an autonomous motion is required for smooth surfaces. Most of the considered models of wheeled mobile robots are in accordance with the laboratory-scale mobile robots that have a light weight. For this purpose, the dynamics of the wheeled mobile robots are ignored, and only the kinematics of these robots are usually considered. The kinematics of a wheeled mobile robot is a simplified model and does not correspond to the reality of the moving vehicle, which obtains time-varying unknown mass and friction [34]. The stabilization/tracking control of nonholonomic wheeled mobile robots with motion restrictions is, in general, challenging. The control of nonholonomic wheeled mobile robots cannot be implemented by the linear control techniques, and the dynamic equations of these systems cannot be transformed into the linear control system structures. The design of the control law using the dynamical model of wheeled mobile robots, where parametric uncertainties in the physical parameters are obviously considered, stimulates researchers to investigate this field [35]. Actually, because of both the richness and hardness of dynamics of wheeled mobile robots, such nonlinear control systems have interested researchers in studying various control methods.
The suggested optimal integral finite-time control approach is implemented on the wheeled mobile robot, with its equations represented by:
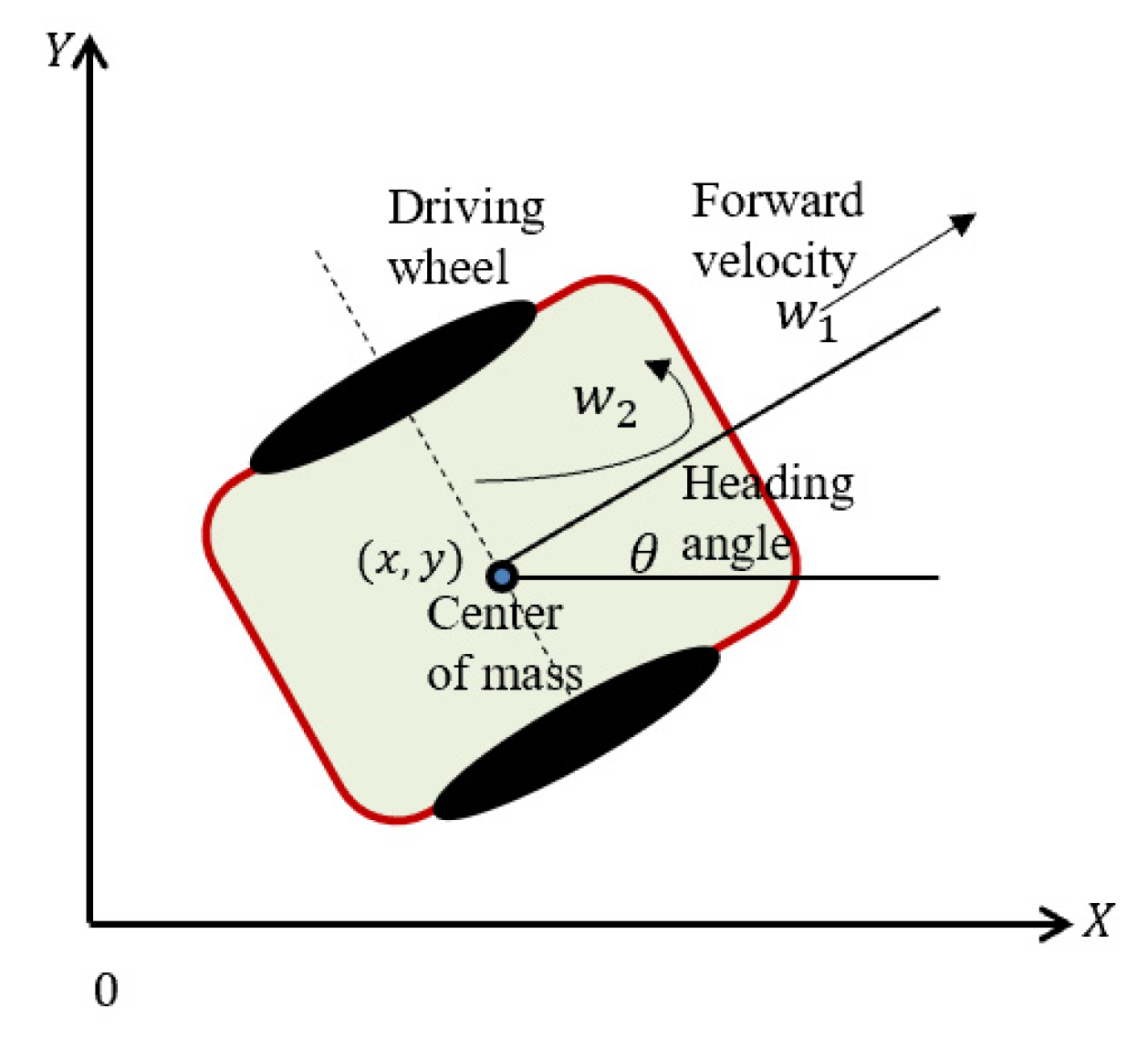
The nonlinear function and disturbance are and , for which we define the following state and control transformations [25]:
where and are locations of the center of mass (CAM), represents the heading angle, is the forward velocity of the CAM, and is the angular velocity.
A schematic view of the considered wheeled mobile robot is shown in Figure 2.
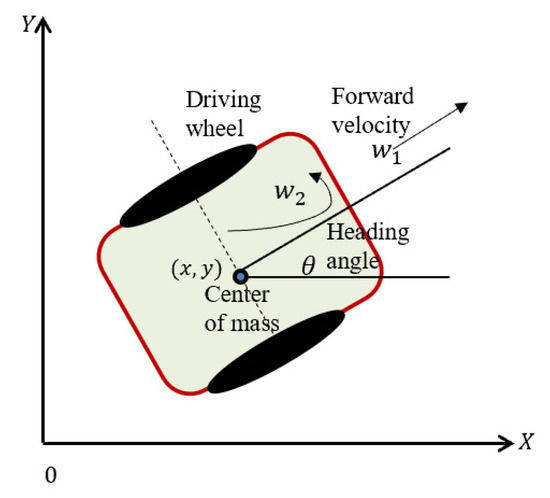
Figure 2.
Wheeled mobile robot.
The reference model is taken as:
The nonlinear term is selected as , and we Define the tracking errors such that:
To evaluate the closed-loop performance, the required parameters are selected as: , , , , , , , , , , and . The initial states are , , . The input signals of the reference model are taken as , and . The performance criterion is considered as where , and is the identity matrix. The function is . The control Lyapunov function is defined by . The functions and are and . Then, it yields the CLF-based suboptimal controller defined by:
where . Moreover, the overall control law is defined as:
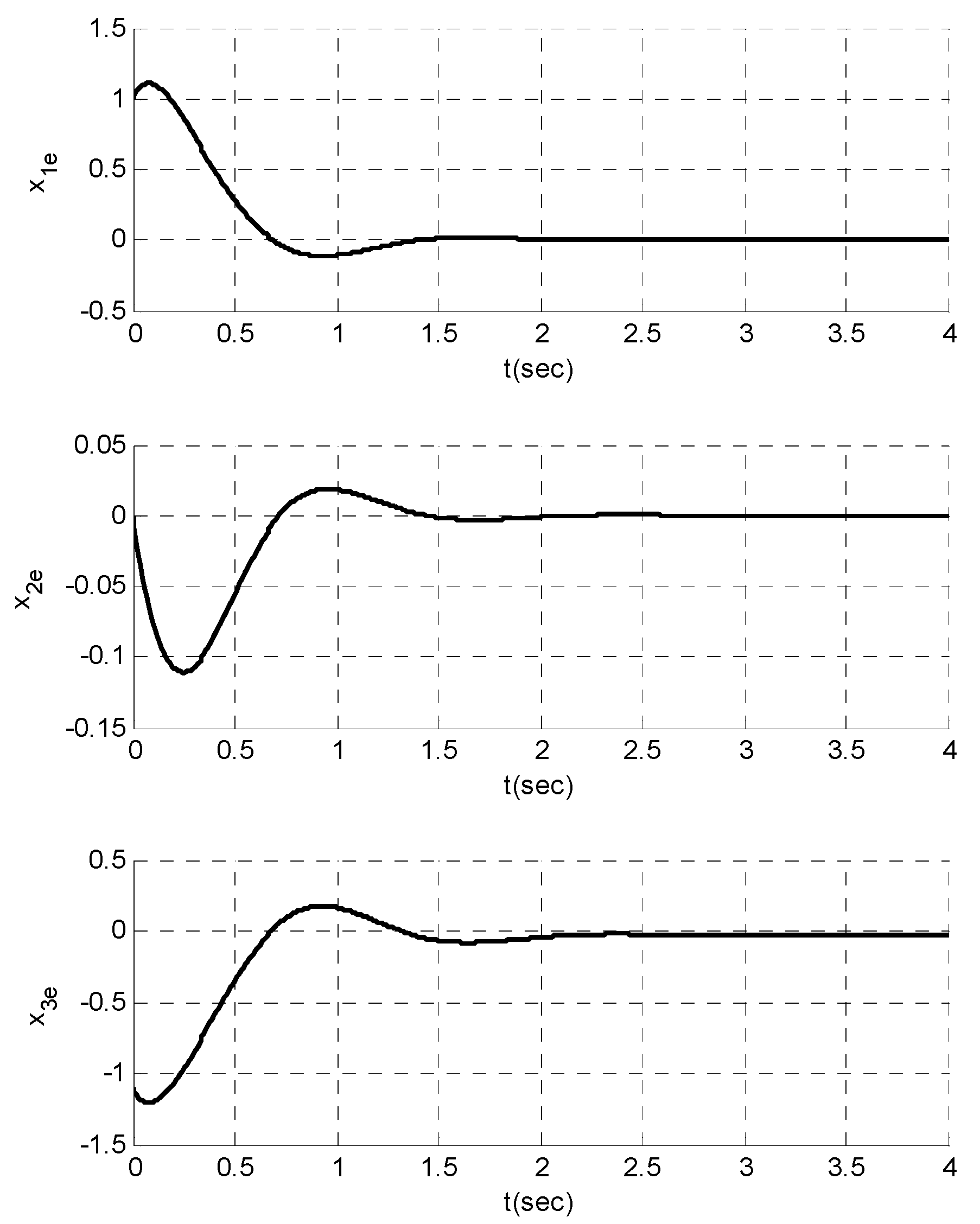
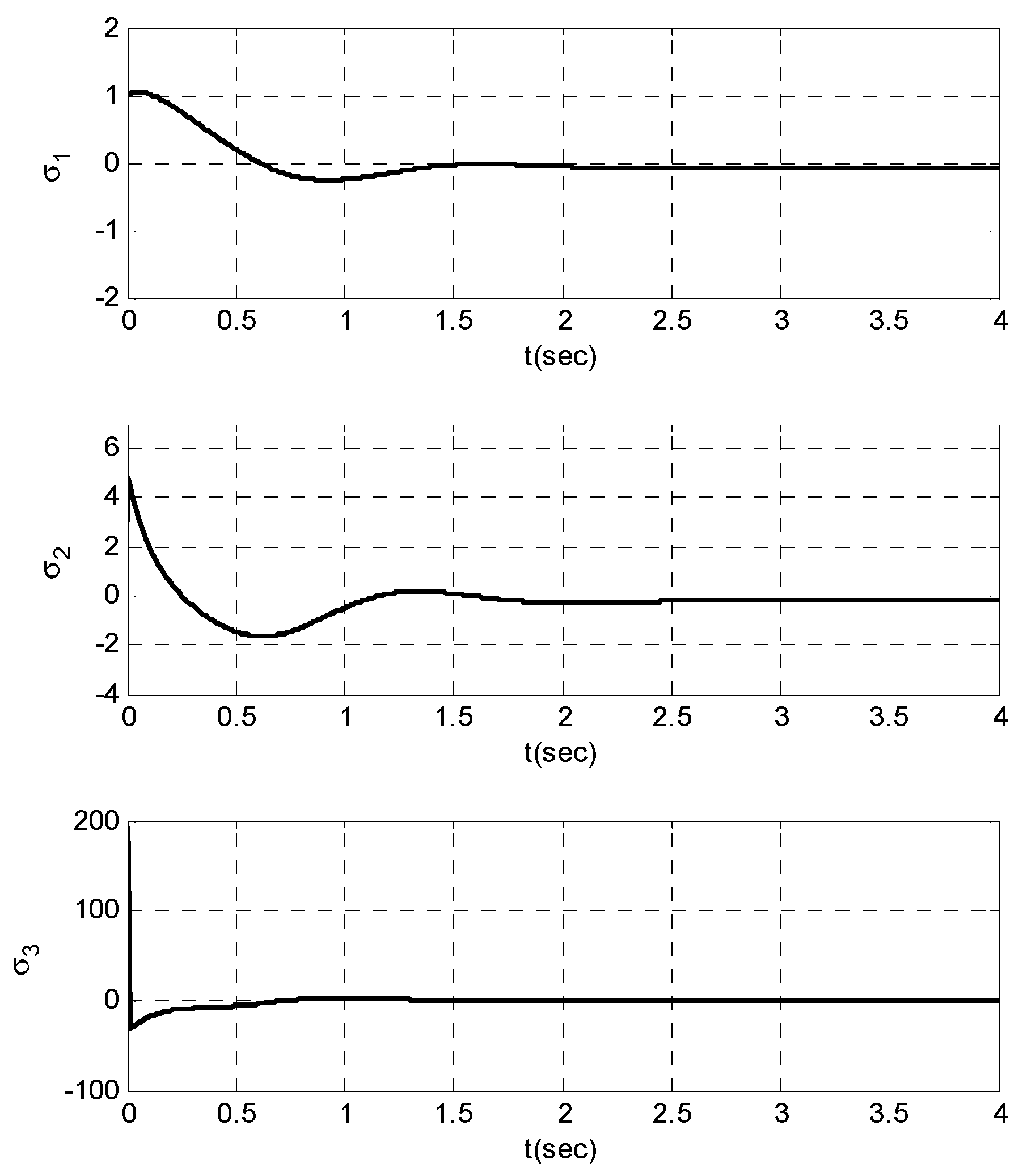
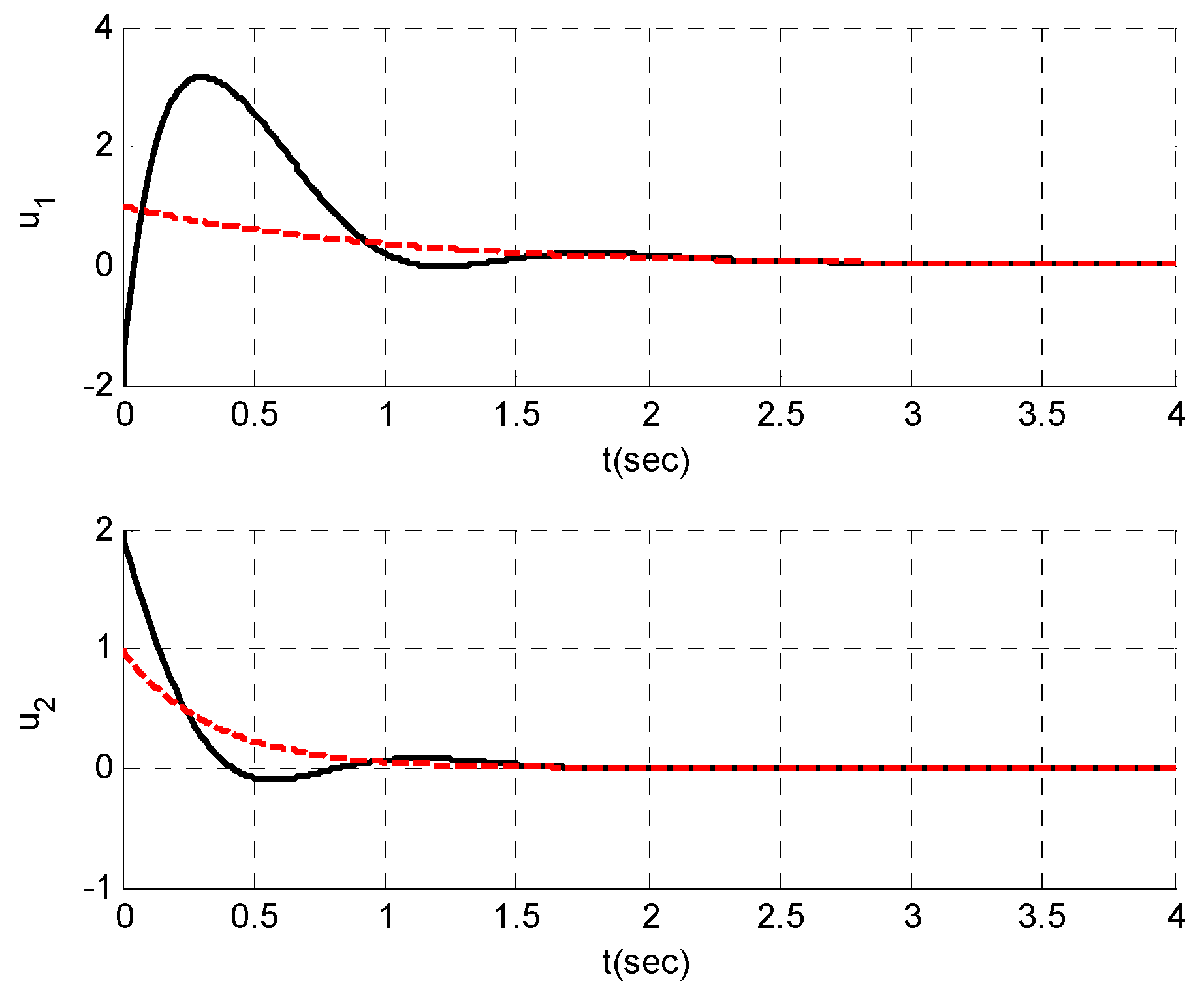
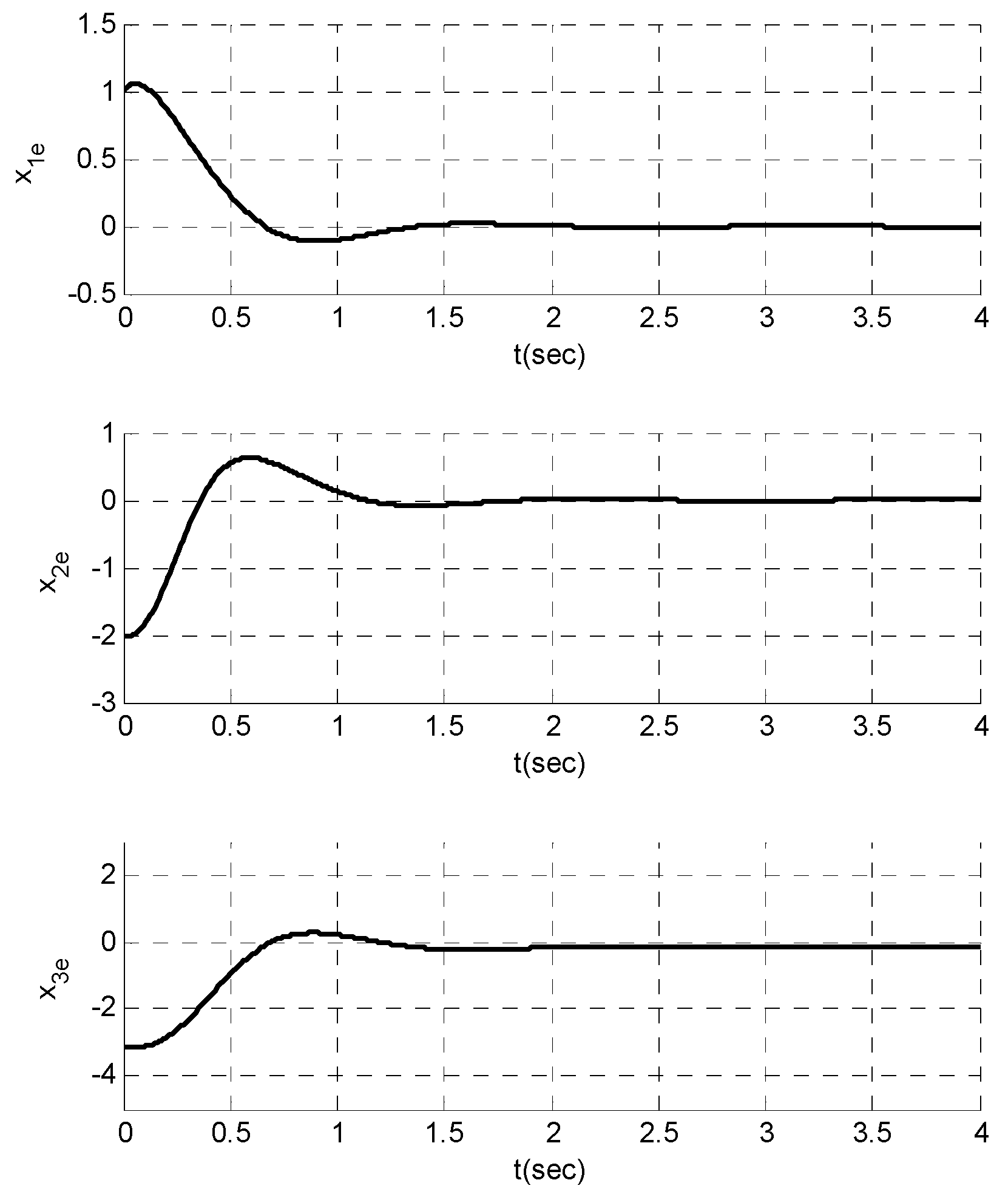
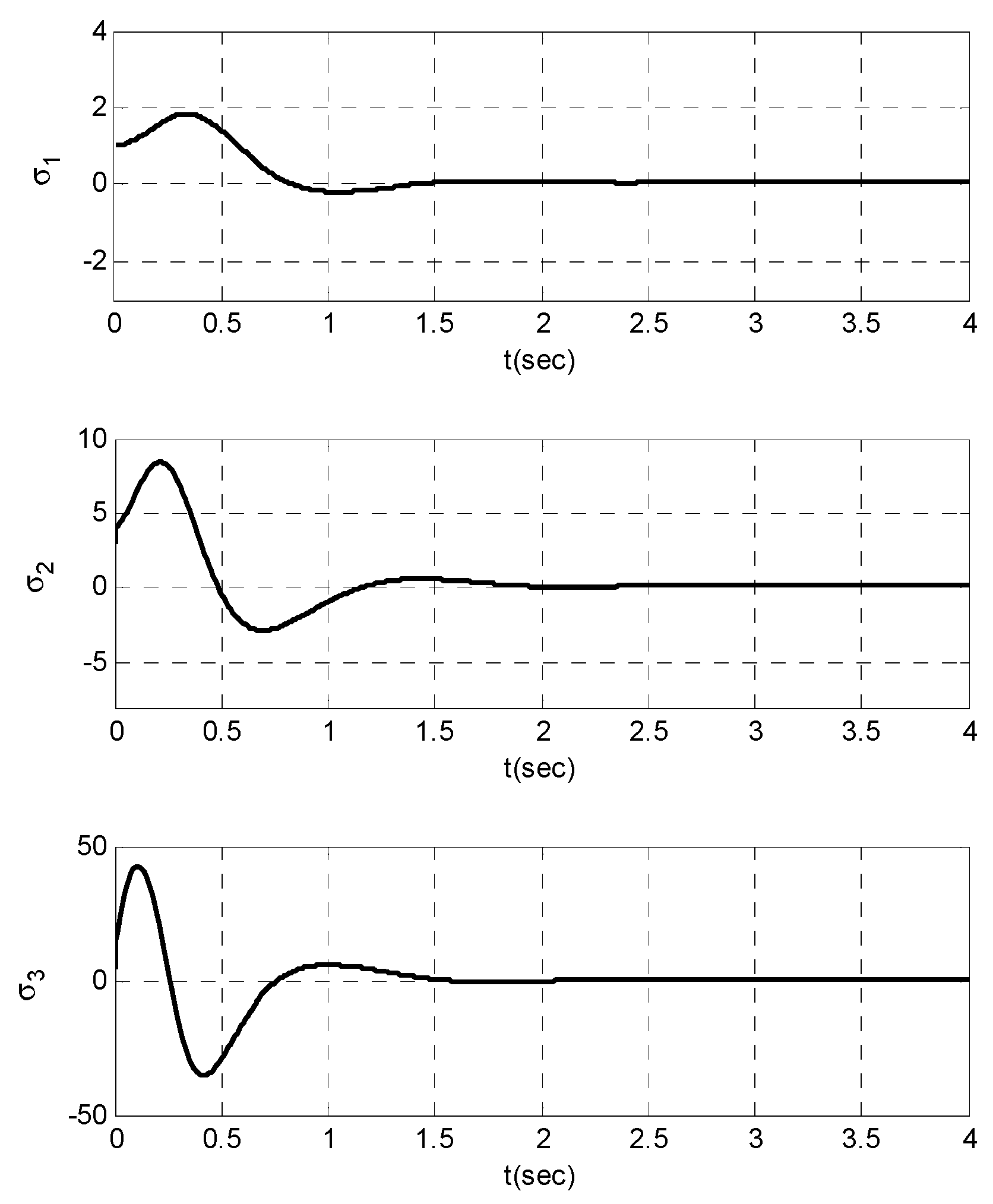
Figure 3 depicts the dynamics of the error signals. Note that this figure illustrates the superior tracking performance and robustness of the responses in the presence of external disturbances. The sliding surfaces are exposed in Figure 4, which demonstrates the quick convergence of the sliding surfaces to the origin. The dynamics of the control efforts and and the trajectories of the desired control inputs are depicted in Figure 5. It is shown that the control inputs are smooth and are able to overcome the nonlinearities and external disturbances. As a result, it can be observed from these figures that the proposed control method can satisfy the superior tracking responses in the existence of external disturbances.
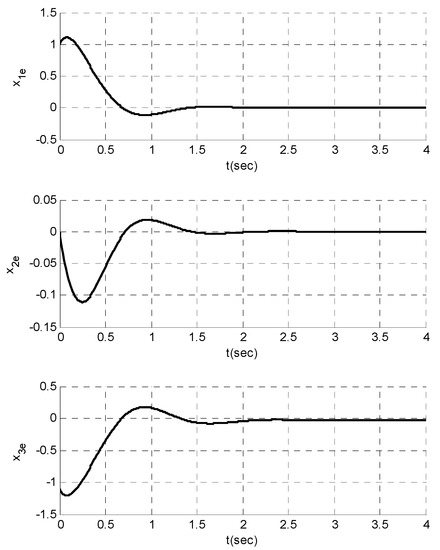
Figure 3.
Tracking errors in a wheeled mobile robot.
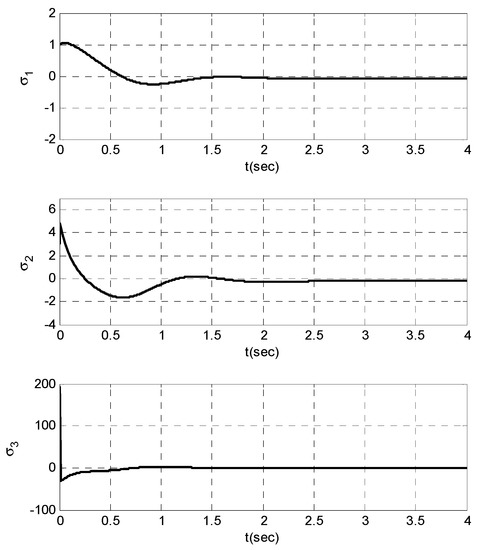
Figure 4.
Sliding surfaces in a wheeled mobile robot.
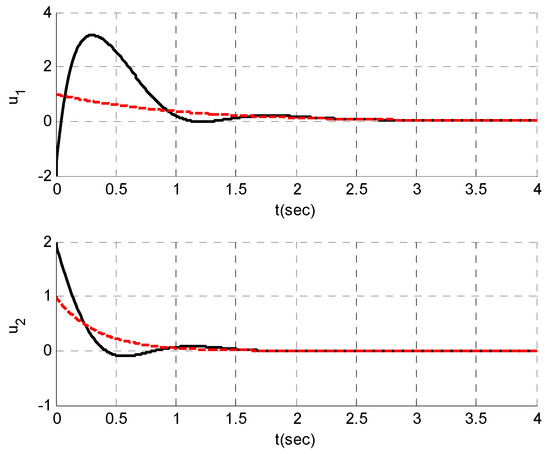
Figure 5.
Applied control inputs in a wheeled mobile robot (black solid lines are the applied controls, red dashed lines are the desired inputs).
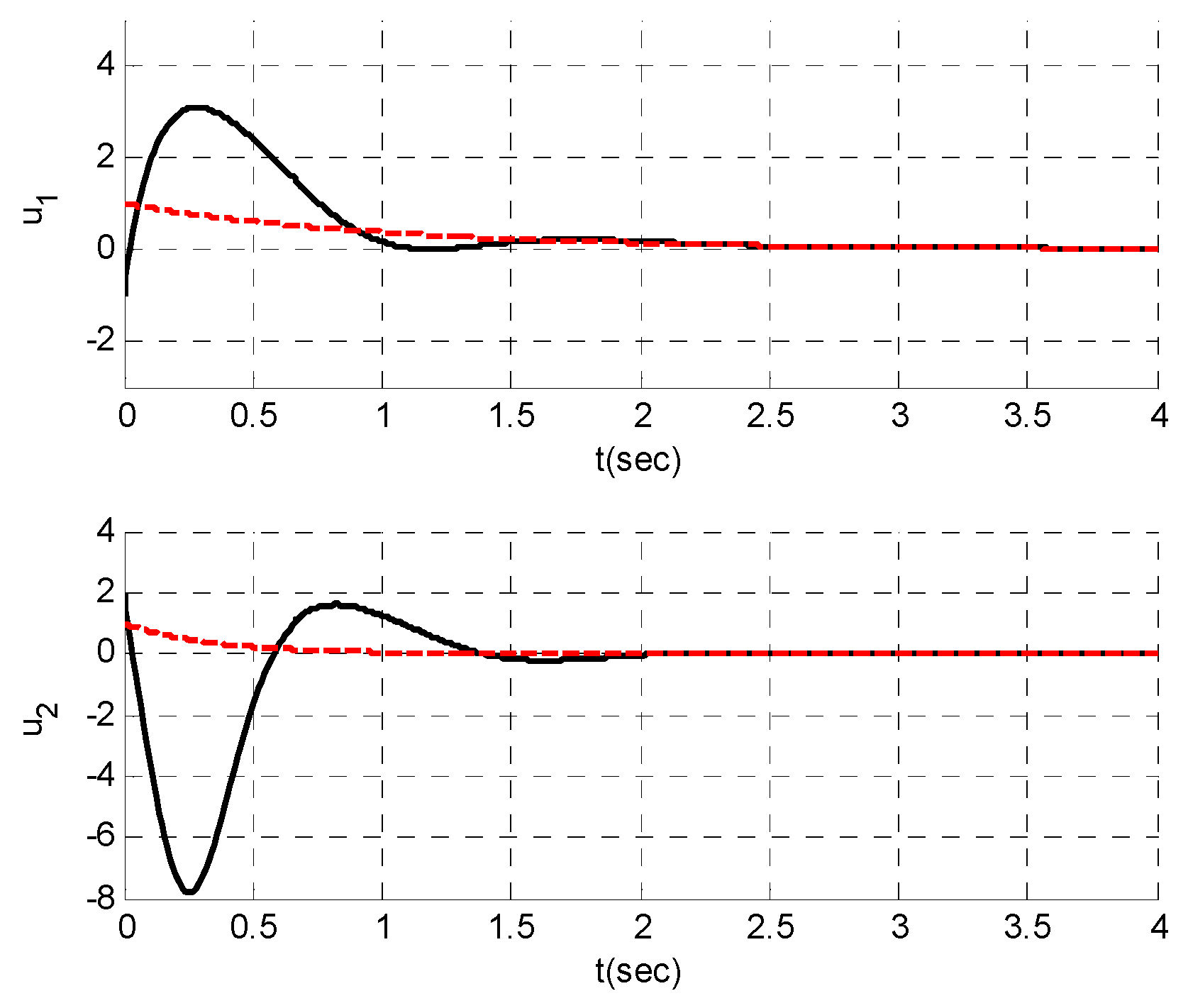
For the robustness analysis, the initial conditions of the tracking errors and control inputs are considered as , , and . The external disturbance term is set as . Time responses of the tracking errors, switching surfaces, and control input signals are shown in Figure 6, Figure 7 and Figure 8. It can be seen from Figure 6 that the tracking errors converge to the origin suitably, without any steady-state error. Moreover, it can be seen from Figure 7 and Figure 8 that the sliding surfaces and control inputs converge to zero without any chattering problem. All of the results exhibit that the responses are robust in the new condition, with different initial states and external disturbance values.
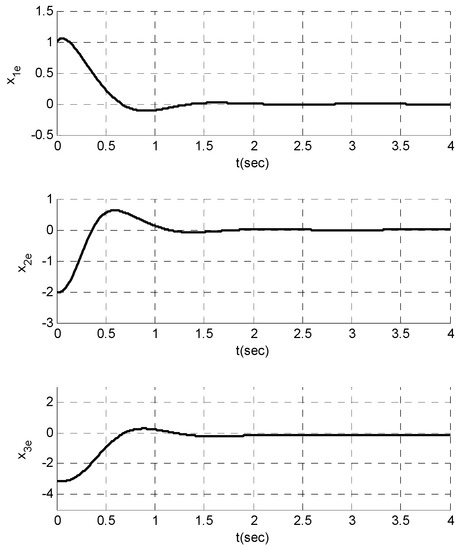
Figure 6.
Tracking errors of wheeled mobile robot (in the new condition).
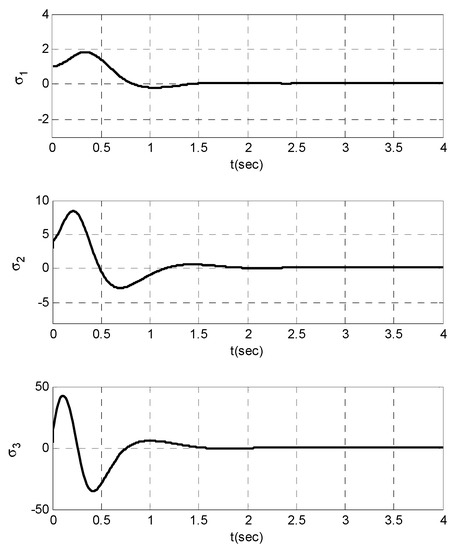
Figure 7.
Sliding surfaces of wheeled mobile robot (in the new condition).
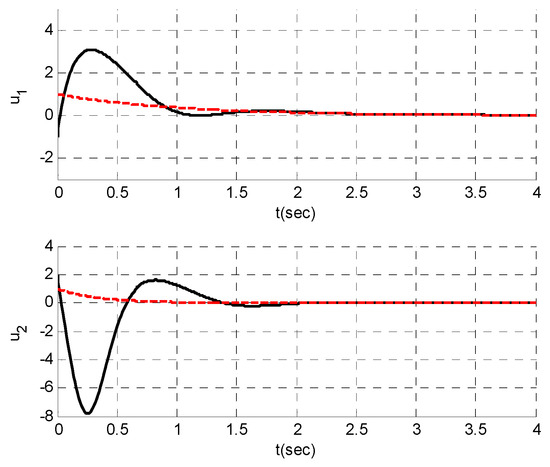
Figure 8.
Control inputs of wheeled robot in new condition (black solid lines are the applied control signals, red dashed lines are the desired inputs).
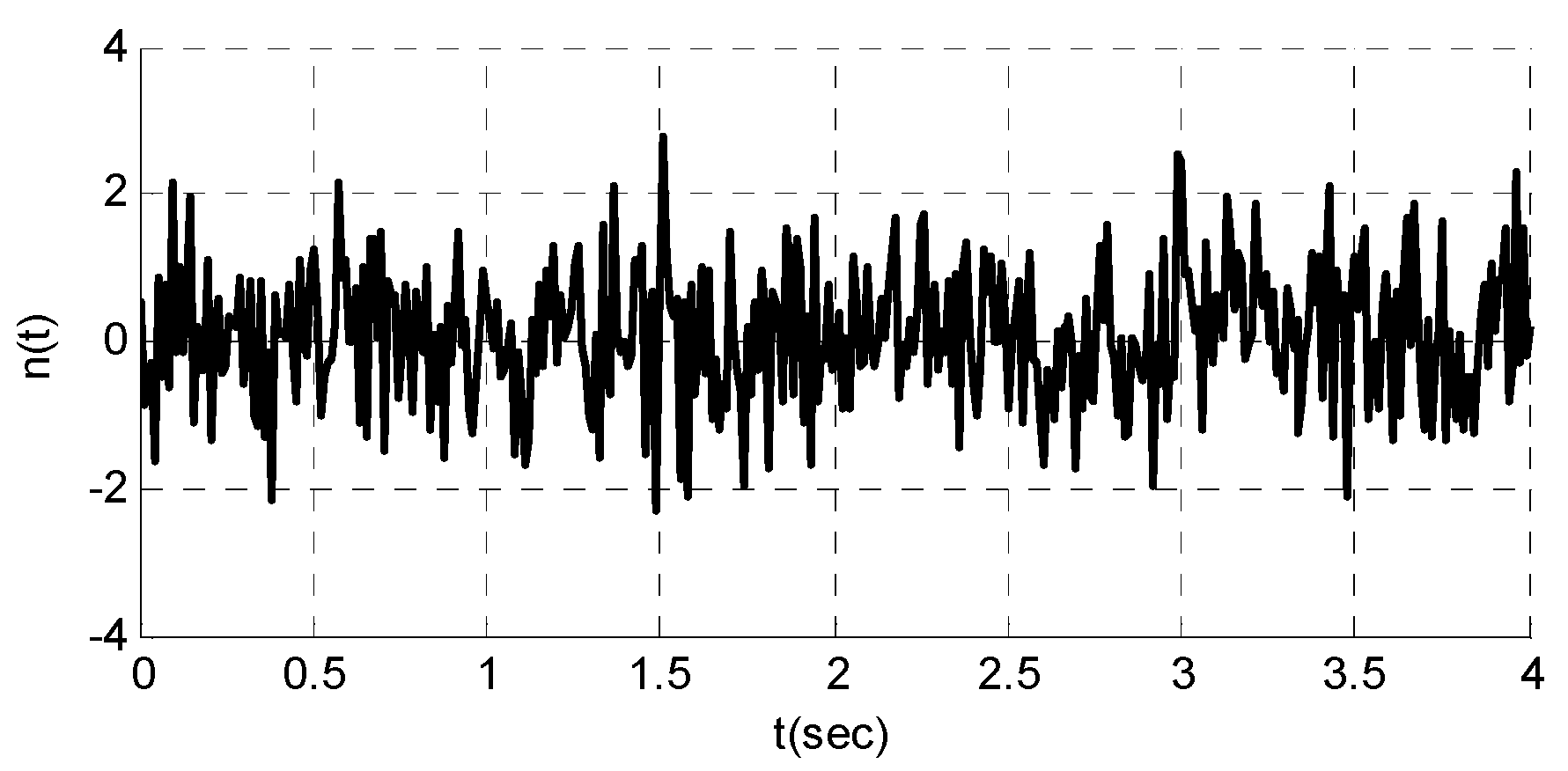
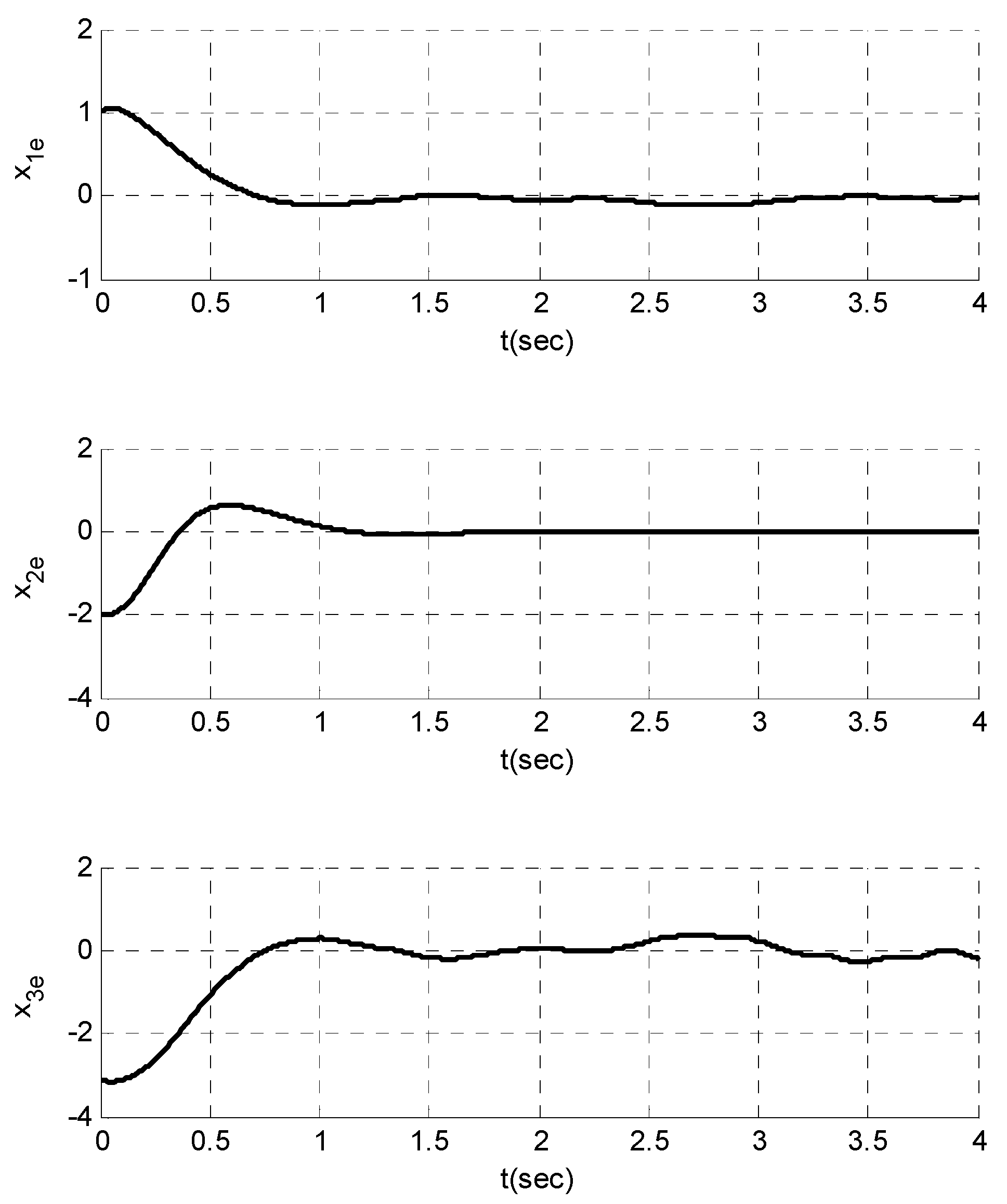
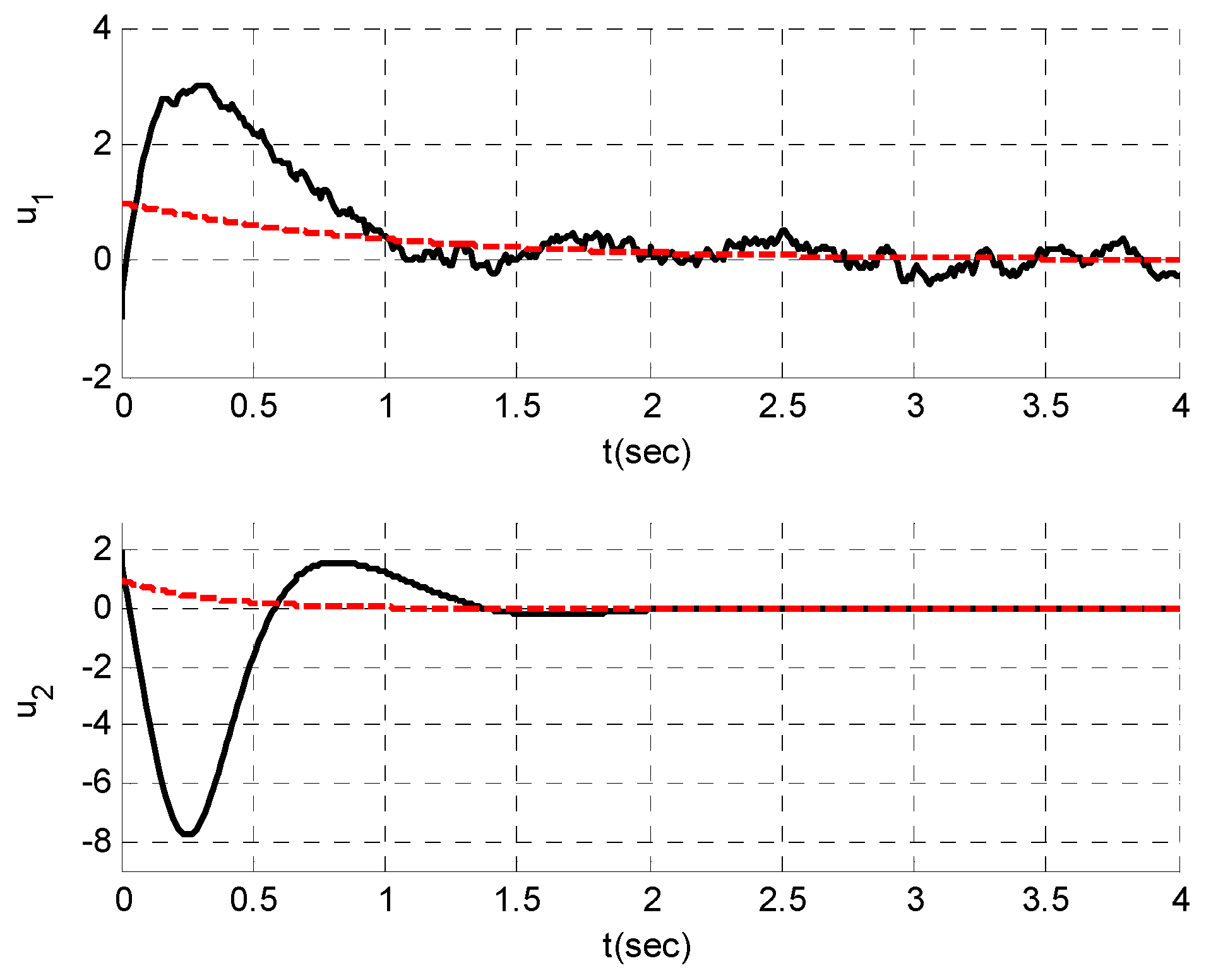
For more studies on the robustness of the control method, a band-limited white noise (with noise power 0.001, sample time 1 millisecond) is added to the states of the system. Figure 9 shows the measurement noise signal. This noise signal shows that the responses of the system seem somewhat noisy. Time responses of the tracking errors, sliding surfaces, and control inputs are shown in Figure 10, Figure 11 and Figure 12. In the time responses of Figure 10, it can be seen that the tracking error signals are convergent to the origin. However, these responses experience some light effects of measurement noises. Furthermore, the noisy responses can be observed in the sliding surfaces (Figure 11) and control inputs (Figure 12); nevertheless, the sliding surfaces and control signals oscillate around zero, which shows that the responses do not diverge to infinity (the responses remain stable). Hence, the advised control method has acceptable robust performance in the existence of exterior disturbances and measurement noise.
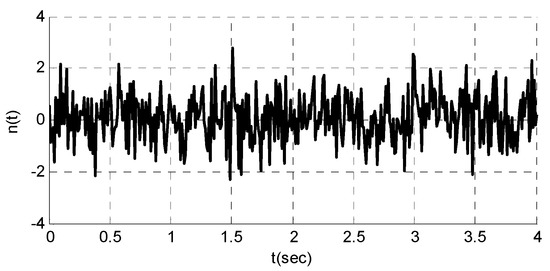
Figure 9.
Measurement noise signal.
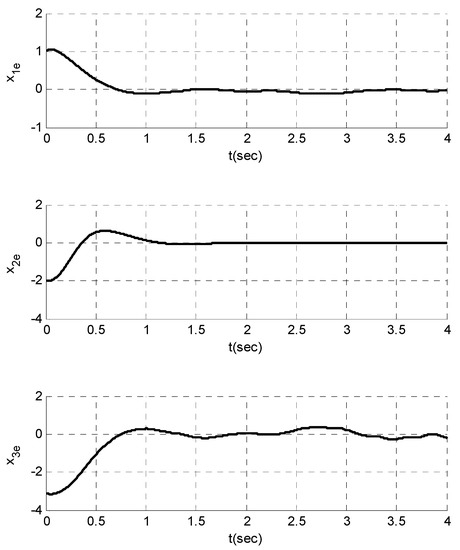
Figure 10.
Tracking errors (in the presence of measurement noises).
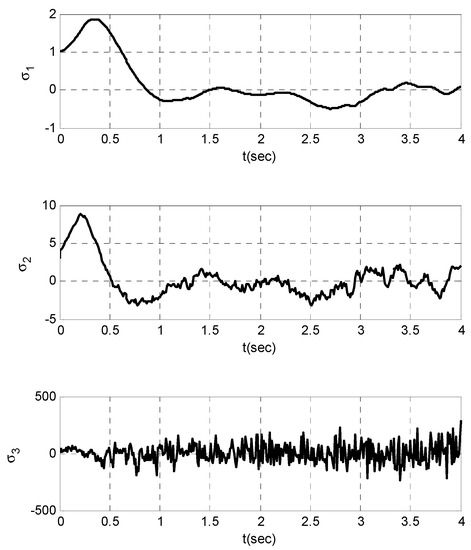
Figure 11.
Sliding surfaces (in the presence of measurement noises).
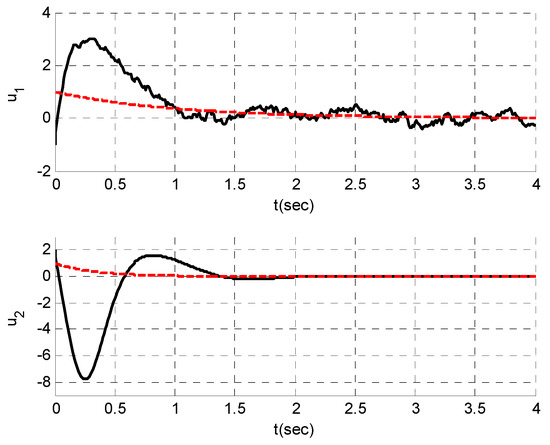
Figure 12.
Control inputs in presence of measurement noises (black solid lines are the applied control signals, red dashed lines are the desired inputs).
5. Conclusions
A control Lyapunov-based optimal integral terminal sliding mode control approach is planned for a class of asymmetric nonholonomic robotic systems with external disturbances. The design procedure entailed synthesizing an optimal control law based on the CLF for the nominal system, then deriving an ITSMC approach to ensure robustness against modelled and unmodelled disturbances. To ensure both finite-time stability and robustness, the optimal control input is combined with the integral TSM. Apart from the robustness features, the suggested methodology has the benefit of being optimum and chattering-free, thereby being better suited for practical implementations to common systems, such as surface vessels, wheeled robots, space crafts, etc. For the extension of the proposed work, the event-triggered optimal finite-time tracking controller design method for perturbed nonholonomic robotic systems will be considered in future research.
Author Contributions
Conceptualization, K.A.A. and S.M.; methodology, K.A.A., S.M. and W.A.; software, W.A. and J.H.A.; validation, J.A., A.A.A. and A.H.A.; formal analysis, S.M. and W.A.; data curation, K.A.A.; writing—original draft preparation, K.A.A., S.M., W.A., J.H.A. and A.A.A.; writing—review and editing, J.A., A.A.A. and A.H.A. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been supported by the Polish National Science Centre under the grant OPUS 18 No. 2019/35/B/ST8/00980.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available within the article.
Acknowledgments
The research was supported by the Taif University Researchers Supporting Project (TURSP-2020/349), Taif University, Taif, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Popescu, M.; Popescu, P. Noether Invariants for Nonholonomic Systems. Symmetry 2021, 13, 641. [Google Scholar] [CrossRef]
- Guan, Z.H.; Zhan, X.S.; Feng, G. Optimal tracking performance of MIMO discrete-time systems with communication constraints. Int. J. Robust Nonlinear Control. 2012, 22, 1429–1439. [Google Scholar] [CrossRef]
- Ornelas-Tellez, F.; Rico, J.J.; Ruiz-Cruz, R. Optimal tracking for state-dependent coefficient factorized nonlinear systems. Asian J. Control. 2014, 16, 890–903. [Google Scholar] [CrossRef]
- Vlassenbroeck, J.; Van Dooren, R. A Chebyshev technique for solving nonlinear optimal control problems. IEEE Trans. Autom. Control. 1988, 33, 333–340. [Google Scholar] [CrossRef]
- Gao, D.-X.; Tang, G.-Y.; Zhang, B.-L. Approximate optimal tracking control for a class of nonlinear systems with disturbances. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 521–525. [Google Scholar]
- Fernandes, S.R. Piecewise constant optimal control for damping sustained oscillations in FACTS using Walsh functions. In Proceedings of the 2005 International Power Engineering Conference, Singapore, 29 November–2 December 2005; pp. 1–388. [Google Scholar]
- Xiao, G.; Zhang, H.; Luo, Y. Online optimal control of unknown discrete-time nonlinear systems by using time-based adaptive dynamic programming. Neurocomputing 2015, 165, 163–170. [Google Scholar] [CrossRef]
- Bian, T.; Jiang, Y.; Jiang, Z.-P. Adaptive dynamic programming and optimal control of nonlinear nonaffine systems. Automatica 2014, 50, 2624–2632. [Google Scholar] [CrossRef]
- Chaouch, D.E.; Ahmed-Foitih, Z.; Khelfi, M.F. A self-tuning fuzzy inference sliding mode control scheme for a class of nonlinear systems. J. Vib. Control. 2012, 18, 1494–1505. [Google Scholar] [CrossRef]
- Fei, J.; Chen, Y. Dynamic terminal sliding-mode control for single-phase active power filter using new feedback recurrent neural network. IEEE Trans. Power Electron. 2020, 35, 9906–9924. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, K.; Chen, B.; Jin, M. Model-free continuous nonsingular fast terminal sliding mode control for cable-driven manipulators. ISA Trans. 2020, 98, 483–495. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Liu, X. Model-Free Non-Cascade Integral Sliding Mode Control of Permanent Magnet Synchronous Motor Drive with a Fast Reaching Law. Symmetry 2021, 13, 1680. [Google Scholar] [CrossRef]
- Song, B.; Sun, J.-Q. Sliding mode control of uncertain dynamical systems with time delay using the continuous time approximation method. J. Vib. Control. 2012, 18, 1254–1260. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, L.; Yu, L. Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation. IEEE Trans. Ind. Electron. 2020, 68, 756–766. [Google Scholar] [CrossRef]
- Zhang, Y.; Nie, Y.; Chen, L. Adaptive Fuzzy Fault-Tolerant Control against Time-Varying Faults via a New Sliding Mode Observer Method. Symmetry 2021, 13, 1615. [Google Scholar] [CrossRef]
- Van, M.; Do, X.P.; Mavrovouniotis, M. Self-tuning fuzzy PID-nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. ISA Trans. 2020, 96, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Jie, W.; Yudong, Z.; Yulong, B.; Kim, H.H.; Lee, M.C. Trajectory tracking control using fractional-order terminal sliding mode control with sliding perturbation observer for a 7-DOF robot manipulator. IEEE/ASME Trans. Mechatron. 2020, 25, 1886–1893. [Google Scholar] [CrossRef]
- Kong, X.; Zhang, T. Non-Singular Fast Terminal Sliding Mode Control of High-Speed Train Network System Based on Improved Particle Swarm Optimization Algorithm. Symmetry 2020, 12, 205. [Google Scholar] [CrossRef] [Green Version]
- Pukdeboon, C.; Kumam, P. Robust optimal sliding mode control for spacecraft position and attitude maneuvers. Aerosp. Sci. Technol. 2015, 43, 329–342. [Google Scholar] [CrossRef]
- Sun, N.; Niu, Y.; Chen, B. Optimal integral sliding mode control for a class of uncertain discrete-time systems. Optim. Control. Appl. Methods 2014, 35, 468–478. [Google Scholar] [CrossRef]
- Ji, W.; Jianbin, Q.; Karimi, H.R.; Fu, Y. New results on fuzzy integral sliding mode control of nonlinear singularly perturbed systems. IEEE Trans. Fuzzy Syst. 2020, 29, 2062–2067. [Google Scholar] [CrossRef]
- Song, W.; Dyke, S. Optimal feedback design for nonlinear stochastic systems using the pseudospectral method. Int. J. Non-Linear Mech. 2013, 55, 70–78. [Google Scholar] [CrossRef]
- Sontag, E.D. A ‘universal’construction of Artstein’s theorem on nonlinear stabilization. Syst. Control. Lett. 1989, 13, 117–123. [Google Scholar] [CrossRef]
- Xu, J.-X. A quasi-optimal sliding mode control scheme based on control Lyapunov function. J. Frankl. Inst. 2012, 349, 1445–1458. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, B.; Zong, G. Finite-time tracking controller design for nonholonomic systems with extended chained form. IEEE Trans. Circuits Syst. II Express Briefs 2005, 52, 798–802. [Google Scholar]
- Kolmanovsky, I.; McClamroch, N.H. Developments in nonholonomic control problems. IEEE Control. Syst. Mag. 1995, 15, 20–36. [Google Scholar]
- Brockett, R.W. Asymptotic stability and feedback stabilization. Differ. Geom. Control. Theory 1983, 27, 181–191. [Google Scholar]
- Gover, A.R.; Slovák, J. Non-holonomic equations for the normal extremals in geometric control theory. J. Geom. Phys. 2021, 171, 104395. [Google Scholar] [CrossRef]
- Tian, Y.P.; Cao, K.C. Time-varying linear controllers for exponential tracking of non-holonomic systems in chained form. Int. J. Robust Nonlinear Control. IFAC Affil. J. 2007, 17, 631–647. [Google Scholar] [CrossRef]
- Das, M.; Mahanta, C. Optimal second order sliding mode control for nonlinear uncertain systems. ISA Trans. 2014, 53, 1191–1198. [Google Scholar] [CrossRef]
- Freeman, R.; Kokotovic, P.V. Robust Nonlinear Control Design: State-Space and Lyapunov Techniques; Springer Science & Business Media: New York, NY, USA, 2008. [Google Scholar]
- Komurcugil, H. Adaptive terminal sliding-mode control strategy for DC–DC buck converters. ISA Trans. 2012, 51, 673–681. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Lin, F.-J. Robust nonsingular terminal sliding-mode control for nonlinear magnetic bearing system. IEEE Trans. Control. Syst. Technol. 2010, 19, 636–643. [Google Scholar] [CrossRef]
- Solea, R.; Filipescu, A.; Nunes, U. Sliding-mode control for trajectory-tracking of a wheeled mobile robot in presence of uncertainties. In Proceedings of the 2009 7th Asian Control Conference, Hong Kong, China, 27–29 August 2009; pp. 1701–1706. [Google Scholar]
- Coelho, P.; Nunes, U. Path-following control of mobile robots in presence of uncertainties. IEEE Trans. Robot. 2005, 21, 252–261. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).