1. Introduction
Brno is the second largest city in the Czech Republic and has about 500,000 inhabitants. Every major metropolis faces the challenges of security, housing, cleanliness and transport. Modern information technology, smartphones and other devices are already an essential part of the daily life of citizens and can contribute to the optimization and streamlining of many processes affecting urban life. Brno is also a university city with a strong support for science, research and development, represented by more than 100 scientific research institutions. The most important are, for example, medical and research centers covered by Masaryk University or technical research centers under the auspices of the Brno University of Technology. Brno has the ambition to be a modern city that uses modern technology and thus applies information technology to many areas of social life. The map portal [
1] provides an on-line basic map of the city, as well as many thematically oriented map sets, such as, in the area of spatial planning, price maps, 3D building models, temperature maps, maps of water resources, georisk maps, etc. The basic maps relating to the city of Brno can also be found at the geoportal [
2].
In the last few years, there has been a significant increase in people’s dependence on passenger and freight transport. Increasing traffic has a negative impact on the environment and is also energy intensive. Due to the increase in traffic intensity and density, communications are often very close to capacity. The mobility of people and things is now in the process of fundamental changes, triggered by the rapid development of information and communication technologies and services supporting mobile connectivity. The rapid deployment of mobile digital technologies is also changing the way we provide traffic information or current changes that affect traffic. Intelligent Transport Systems (ITS) are used to optimize transport, increase traffic flow and improve transport safety and reduce its impacts. [
3]. Transport in Brno is provided by trams, buses, trolleybuses and trains. Brno has a public international civil airport providing flights to 25 countries across the world, capable of handling up to 557,000 passengers per year.
The proposed system of parking regulation in the center and adjacent parts of the city of Brno is designed to be conceptually consistent with a higher project Transport Organization and Security System (SOBD) supported by a project of the European Union [
4]. The subject matter of the information system is the management of key information and central management of future sub-systems of transport organization and safety. Such sub-systems include, e.g., parking regulation systems in the historical center of Brno, parking (for residents, visitor parking, parking lot on the outskirts of the city with good connection to public transport, parking houses, barrier systems), speed measurement, junction control, vehicle weighing and parking systems with payment terminals. The software part of the information system supports activities and manages data in the areas of information management and rules related to transport organization and security, authorization management (e.g., parking privileges), management of information provided by sub-systems (e.g., measurement results), compliance assessment, detection and reporting suspected violations, billing and statistics.
The sharp increase in traffic density, especially in large cities, causes problems with parking of vehicles both in historical centers and in adjacent areas. This situation can no longer be solved extensively, i.e., by increasing the number of parking spaces, or even in a classic way, e.g., by regulating parking via members of the municipal police. Therefore, methods were sought to make the parking system in Brno more efficient using modern technologies.
The main objective of this project is:
To prevent long-term (in many cases unauthorized) parking of vehicles in the city center, thus blocking parking capacity;
To ensure a sufficient number of parking places for residents and visitors of Brno by increasing the turnover of parking.
The result of the project is a system that automatically monitors the situation of parking in Brno based on a suitable planning algorithm, and automatically evaluates data from the field based on parking rules, and creates and sends offense documentation to the police for further investigation.
Prior to the launch of the parking monitoring system addressed in this article, no similar automated or semi-automated system was in operation to meet the above objectives.
The aim of the research was to investigate (i) the possibility and optimal use of Geographic Information System (GIS) technology for resident parking system solution, (ii) the integration of Global Satellite Navigation Systems (GNSS) satellite data and image data collected by cameras on the move and (iii) the possibility of using network algorithms to optimize mobile data collection planning. The aim of our study is to design and optimize the integrated collection of image data localized by satellite GNSS technologies in the GIS environment to support the resident parking system, including an evaluation of its effectiveness.
Integrated collection of satellite positioning data and image data to deal with parking regulation in large cities due to high traffic density is a topical issue. It is common to use information technology and to collect and evaluate image data acquired mainly by static cameras. The use of satellite-based collection of photographic data in larger areas by mobile cameras, their integration with GIS technology and subsequent evaluation of data as a basis for regulation of parking by authorities is not yet a commonly used technology. Moreover, it has its pitfalls, which were the subjects of our solution.
The system was expected to significantly increase the economic yield from parking areas, reduce the overall rate of parking violations, increase turnover and thus the availability of short-term parking for visitors and residents in the historical center of Brno and the monitored surrounding areas.
The introduction of the parking monitoring system has completed the construction of the Static Object Base Data (SOBD) system as a partial important data structure contributing to the future possibility of using smart communication between vehicles, which is the subject of the transnational project C-ROADS.
2. Related Concepts and Works
The massive development of the automotive industry causes complications not only in transport but also in the possibilities of vehicle parking. The situation is particularly critical in large cities and densely populated conurbations. Extensive solutions to this problem, i.e., by extending parking areas, have been exhausted in many cases. Therefore, an intensive approach to vehicle parking is currently being promoted, which is based on the establishment of appropriate rules for the efficient use of existing parking capacities in a given location. This method belongs to the wider issue of developed cities (Smart Cities). It is a highly topical subject concerning all cities in developed countries around the world.
There are a number of publications in world databases dealing with similar issues and using mathematical, GIS and other tools that inspired the authors to generate ideas for solving the given issue. The topics of improving the organization of transport and increasing the safety and fluidity of transport in the central parts of various cities were monitored. Another monitored topic was the respect of already implemented regulatory measures in transport related to the issue of illegally parked vehicles, reducing congestion, searching for free parking spaces and also the issue of reducing energy consumption and emissions. In terms of technical tools working with spatial location data, the use of GIS tools proved to be the most suitable.
The publications were selected according to the objective defined in the previous chapter, and according to criteria that specifies the wider aspects of the objective. The categories of topics are:
Improving the organization of transport, i.e., increasing the safety and flow of traffic in the central part of the city;
Increasing respect for regulatory measures in transport and reducing the number of illegally parked vehicles;
Reducing congestion by reducing parking space and thereby reducing energy consumption and emissions;
Increasing safety and ensuring sufficient parking space for residents and visitors;
Use of GIS technology to organize parking in the city.
For each of these categories, the methods used were evaluated and the possibilities of their use in our project were analyzed.
In [
5], the authors provide a search character and deal with works aimed at optimizing traffic routes, parking problems and the detection and prevention of traffic accidents. The most widely used methods for the solution were machine learning (ML) and the Internet of Things (IoT). In paper [
6], the problem of parking has been addressed by proposing an architecture to automate the parking process using the internet of things, artificial intelligence and multi agent systems. The authors in [
7] offer a review of the literature that deals with a wider field of transport problems and its results are useful for solving general transport issues. The study in [
8] deals with traffic management based on fog computing. The method is based on cloud computing and is used to control smart city traffic in real time. The paper in [
9] presents a machine learning method for traffic management. These include parking monitoring, 5G communications and more. The study in [
10] focuses on the design of new road signs for the use of wireless communication technologies. The principle of the proposed solution is the digitization of road signs and their display on the driver’s desk of vehicles.
In our project, we used the principles of the machine learning method in the design of the control algorithm for the calculation of the optimized route of the monitoring vehicle and for the search for free parking places. The use of IoT is foreseen only in the C-ROADS project, when the vehicles will be equipped with the appropriate technology to participate in solving situations in an intelligent transport system.
A new parking model for cost and time optimization is described in [
11]. Performance is measured by a special parameter. The work in [
12] proposes a distributed system that informs drivers about free parking spaces in real time. The detection of vacant places works on the principles of computer vision and machine learning. The study in [
13] proposes an intelligent, fully automated parking management system. It informs the driver about the number of free parking spaces in the immediate vicinity and saves fuel.
From these schematics, it was possible to use common computer vision algorithms to recognize images of the license plates of parked vehicles. Localization of a visitor’s vehicle is realized by the GNSS method or by their location in the mobile operator’s network using the on-board computer in the car or the driver’s smartphone. Based on its current location, the web application or the smartphone application of the Brno parking system [
14] searches for free parking places in the immediate vicinity, including the possibility of vehicle registration into the system. An evolutionary algorithm was used for a similar function in [
15]. Another localization task based on the intelligent algorithm solved in [
16] was to find the nearest place for charging electric vehicles. In our project, it was necessary to solve the integration of static and dynamic data from multiple sources. The use of data from static cameras in combination with IoT has been dealt with in [
17,
18,
19].
The authors in [
15] deal with a system for the allocation of free parking spaces—a system of available mathematical models that works on the basis of a genetic algorithm. The advantage of the system is the speed and efficiency of searching.
In [
17], the authors present a system for data mining from independent sources, which are stored in city computers. Their system is designed to obtain more information for Smart Cities.
A new Smart City Network Design Tool is described in [
18]. The system is based on human machine communication, monitors network traffic and optimizes network services.
In [
19] there is an intelligent management system for managing a large number of IoT devices. The system is based on cloud computing and aims to optimize services within a Smart City.
Article [
16] shows a case study for charging electric vehicles. The principle is an intelligent concept with the possibility of an ecosystem with a user interface for mobile applications. The project is part of the EU Horizon 2020.
One possible way of relieving traffic and reducing the number of vehicles is their sharing, as solved in [
20]. In a study [
21], the authors try to solve the problem of parking by introducing a bicycle sharing system where supply and demand are realized using smartphones. An important part of the actual parking space capacity monitoring system is the interoperability addressed in [
22] by IoT. In terms of enforceability of offenses when parking vehicles, legal conditions are also important. The work in [
23] addresses an analysis of the legal framework for smart city services including transport and parking.
The study in [
20] discusses a car sharing system based on the use of cars in 10 different European cities. The knowledge can be used to design a system that allows car sharing based on prediction, usage and other parameters.
The work in [
22] describes the Global IoT Services system, which enables interoperability within IoT between cities. The application has been verified in Smart Cities in Spain and South Korea.
The authors in [
23] deal with IoT classification within a Smart City. It discusses four IoT cases: an intelligent parking system, intelligent street lighting, intelligent monitoring system and intelligent sensors. Each of these systems is analyzed in this work and their optimization is recommended.
The work in [
21] discusses a bicycle sharing system in China. The system was introduced in 2008 and is based on empirical analysis. The result is the design of a new bicycle sharing system called Dockless bikeshare. This system has proved its worth and supports the Chinese Republic.
Most of the above work solves the problem of parking using modern methods from the field of information technology, web applications and multi-criteria decision making. Surprisingly, very few projects use GIS as an integrating element between static and dynamic spatial data. It is this principle that the authors chose as the basic element of the concept presented in the next chapter.
The authors in [
24] use a web GIS in combination with multicriterial analysis (MCDA) to find parking spaces. The principle of the solution is group decision-making, which leads to a decrease in the share of information retrieval, average time spent gathering individual information and variability of information retrieval per attribute in the context of parking space selection.
The work in [
25] uses GIS technology to select the optimal places for parking and charging electric cars in Germany. The system evaluates demand near points of interest.
The study in [
26] presents the use of GIS to monitor traffic density and free parking spaces in Vilnius (Lithuania).
The issue of changing the standards of parking space dimensions in the context of the trend for purchasing and manufacturing larger vehicles that provide the best possible comfort is addressed in [
27]. Parking space projects tend to design parking spaces for a representative set of vehicle types, but the effort is to minimize the dimensions of parking spaces. The article evaluates an analysis of vehicles from different countries and with different dimensions that are comparable to the dimensions of parking spaces.
3. The Concept of Transport Organization and Security System in the Historical Center of Brno
The Residential Parking Project in Brno is part of the Transport Organization and Security System (SOBD) [
4], which contains:
A parking regulation system in the historical center of Brno;
Speed measurement;
Checking drivers who drive through red traffic lights;
Vehicle weighing;
Parking organization (resident parking (R), visitor parking (P), R and P parking, parking houses, barrier systems);
Parking systems with payment terminals.
In 2018, the first results of the C-ROADS Czech Republic project [
28], which is closely linked to the C-ROADS international initiative, which was the result of joint activities of the Czech Republic, Austria and Germany, were put into operation in Brno. The C-ROADS Czech Republic project is co-funded by the EU under the Connecting Europe Facility program (CEF). The main objective of the project was, in cooperation with other European countries, to harmonize the provision of data communication services between vehicles and to allow communication between vehicles and intelligent transport infrastructure, thus creating an environment for the emergence of cooperative intelligent transport systems (C-ITS) including the possibility of using autonomous vehicles. The use of new technologies will contribute to greater safety for road users and smoother and more efficient transport, including achieving the effect of reducing emissions in the atmosphere. C-ITS systems inform drivers in a timely and accurate way about traffic conditions and warn of dangerous locations and other problems around them. In addition, traffic control and information centers receive accurate and comprehensive information on the current traffic situation directly from vehicles. As a result, it is possible to efficiently influence traffic flow and thereby increase traffic flow and safety and reduce its negative environmental impact [
28]. The most important part of the traffic management in Brno is the Central Technical Control Center (CTD), which provides dispatching activity, remote supervision of traffic lights, evaluates information from the city surveillance system, monitors public transport preferences, operates a traffic information center [
29], manages the parking system, home and paid parking in the city of Brno and cooperates with authorities, police and integrated rescue systems [
30].
Citizens can also contribute to improving the quality of road maintenance through a mobile application to report defects on urban roads under the management of the Brno Communication Company [
31]. In order to reduce the number of towing vehicles in the block cleaning of public roads, the application is in operation with their clear terms and locations [
32].
Partial goals of optimization of the parking system:
Improving the organization of transport, i.e., increasing the safety and fluidity of transport in the central part of the city;
Increasing respect for traffic-regulatory measures and reducing the number of illegally parked vehicles;
Reducing congestion by reducing parking space and thus reducing energy consumption and emissions;
Increasing security and ensuring adequate parking space for residents and visitors.
Transport organization is generally a complex issue that cannot be solved without the support of new information technologies. Since it is a method that requires spatial information (position-related information in the reference coordinate system), it is possible to use GIS technologies.
There are four areas currently operating in the system. The central area—Brno center—which has specific rules and entrance to the historical city center is guided by the entry permissions. The other three resident parking areas are linked to the Central District in the northern part and are defined by specific streets. The resident parking system has been phased in. The first stage was launched in 2018. In March 2019, a new concept for residential parking in the city of Brno was approved. More information can be found in [
4].
The principle of the proposed solution is based on the use of static (parking areas) and dynamic (monitoring data) spatial data processed in the geographical information system (GIS).
The parking monitoring system is based on the use of a mobile camera system for a large number of parking spaces located in the city of Brno. This technology is original in the Czech Republic. The mobile system is more efficient than the system of a large number of static cameras due to the limited possibilities for their installation, including the necessity of solving the problem of the necessary image quality.
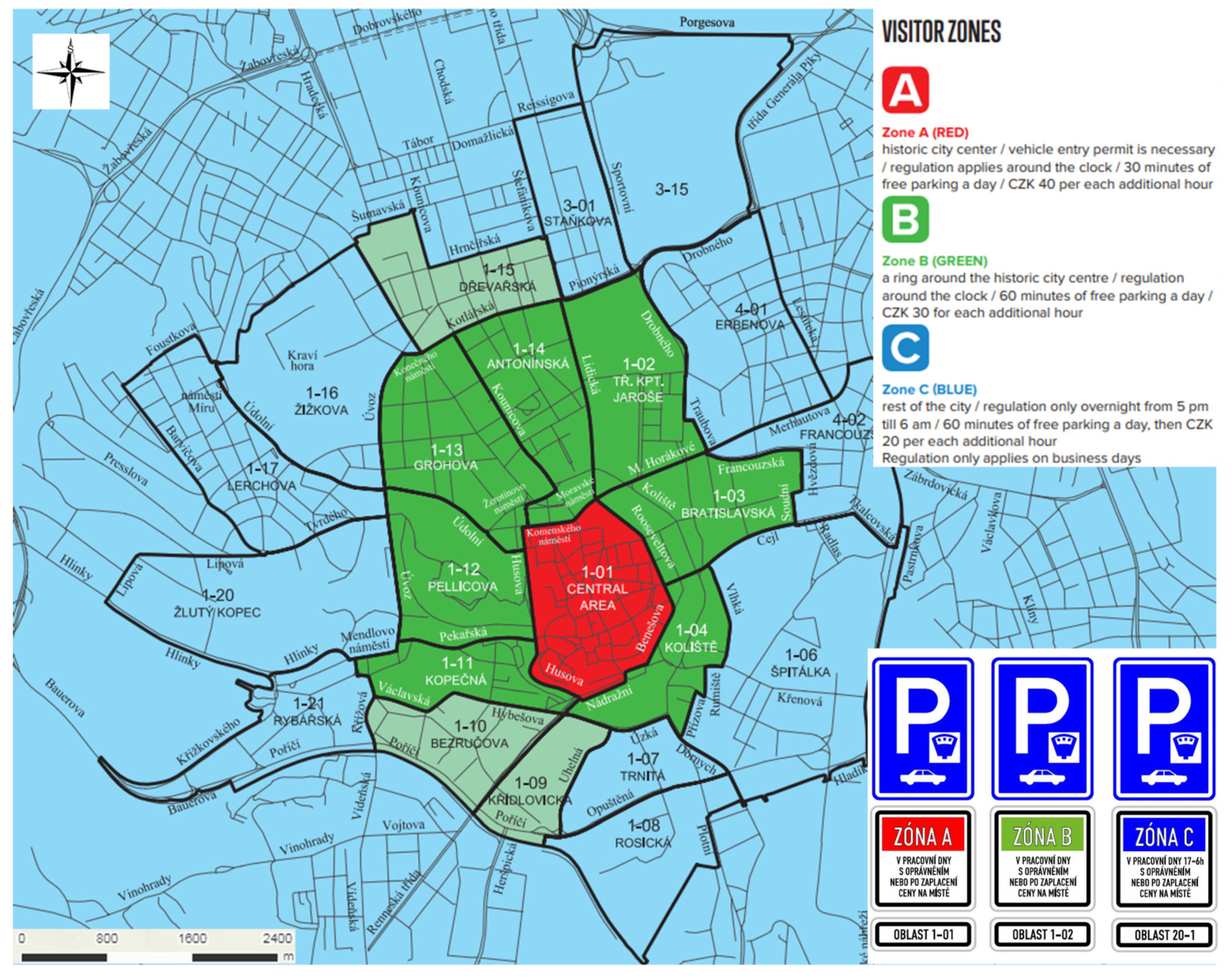
The resident parking areas are shown in
Figure 1, together with the types of traffic signs displayed. The red zone A (center of the city) is the entrance restricted zone (resident mode), the green zone B (central area of the city) is without entry restriction (subscription and visitor mode), blue zone C (edge zone) is not controlled during the day. The zones differ in the price of parking, the most expensive being the central zone. Examples of traffic signs illustrate how a car parking area in a given street zone is marked.
In
Figure 1, areas with authorized parking are enclosed in red. Area 1-01 is the central area; areas 1-02, 1-13 and 1-14 are named after the area’s most important street. Road signs in partial areas always include a supplementary table that identifies the area, e.g., 1-01, and specifies its restriction.
Resident parking space (Residents) it is intended for a natural resident in a demarcated area or for a property owner in a demarcated area.
Subscription parking place (Subscribers) it is intended for an entrepreneurial natural or legal person established in the demarcated area or for an entrepreneurial natural or legal person with an establishment in the demarcated area.
Visiting persons (Visitors) are neither subscribers nor residents. In the areas of the new parking system, which are marked with an orange band mark, short-term parking is free (60 or 30 min by price band, once every 24 h), then paid via parking meters or mobile app. Another solution is the use of parking houses or parking places. Persons going to visit a particular resident can ask for a temporary parking permit. Each resident (including children and non-residents) can split up to 150 parking hours a year.
Parking houses are buildings for toll parking in the center. Currently, there are eight parking houses with a capacity of 1310 parking spaces.
4. Materials and Methods
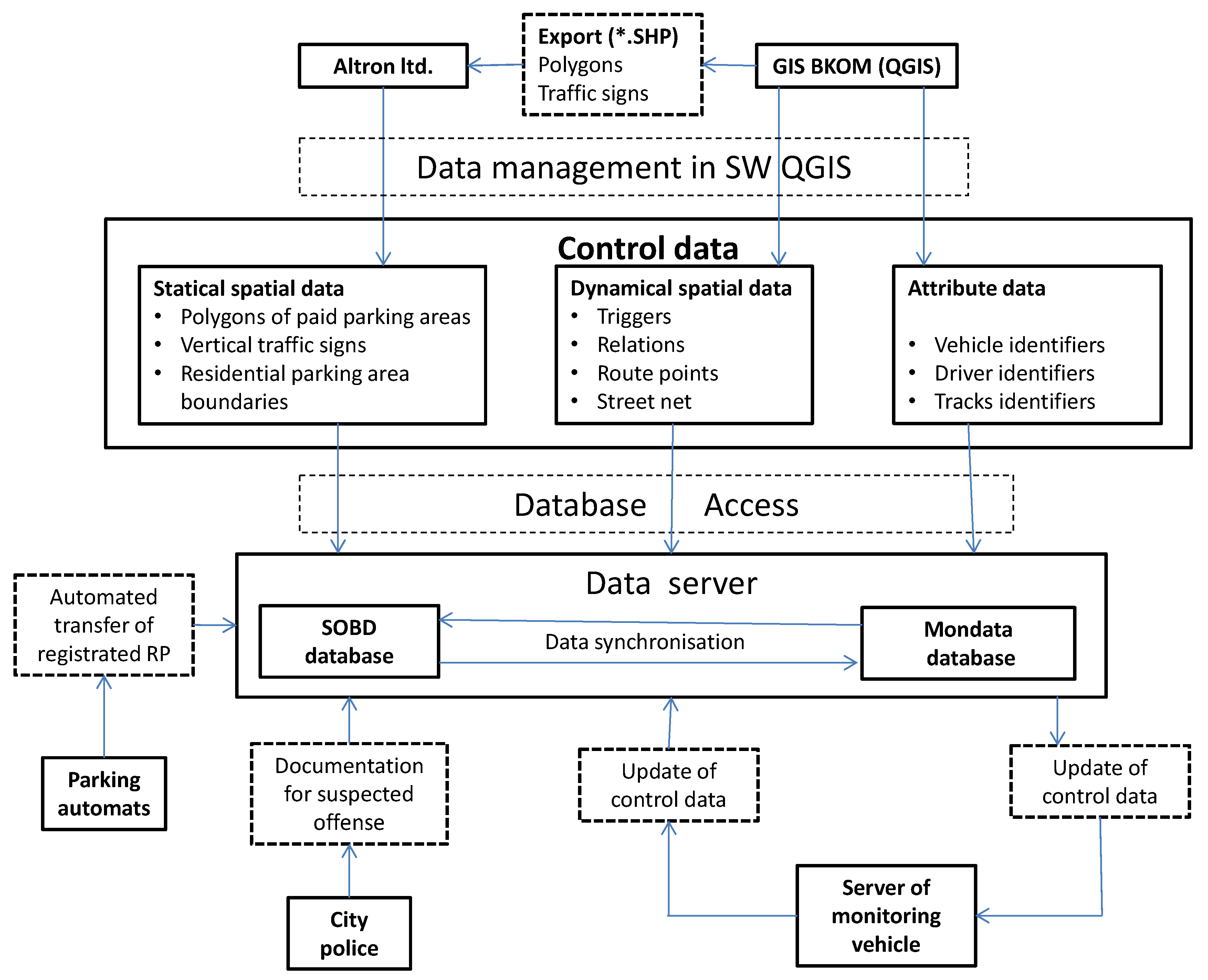
The parking system model is based on control data, which consists of three parts.
Static spatial data locate parking spaces, arising from the project or geodetic survey, and are formed by:
Horizontal road markings are represented by polygons, and vertical markings are represented by points. In addition to the position, the data includes other attributes such as identification codes, types of stall, Zones of Parking Stages (ZPS) capacity, operating hours, etc.
Dynamical spatial data consist of data generated by mobile integrated data collection using camera recordings of localized Global Navigation Satellite Systems (GNSS) technologies. Data are captured on the basis of attributes, which are used to start the camera in place of triggers. These data are comprised of:
Monitor triggers;
Links;
Routes and waypoints;
The street network.
Attribute data are used for the parametric settings of the camera system based on the orientation of the parking lot to the monitoring vehicle (perpendicular or inclined position of the vehicles, left, right). The data contain these items:
Vehicle identifiers;
Driver identifiers;
Track identifiers.
Figure 2 is a diagram of the data flow between components of the parking system.
The basic pillar of control data is the existence of the polygons of pay stall areas and vertical traffic signs in vector form. The basis for creating polygons is a geodetic survey or project. The result is then a digital map with the polygons of parking areas within the paid parking zone. The Brno Communication Center uses GIS software from City Data Software, Ltd. (CDSw), in which it records the passport data of roads and their features in the city of Brno. One of the applications of this GIS software is Transport, where both horizontal and vertical traffic signs are recorded.
These polygons represent surfaces in individual layers:
Residential parking areas;
License plate parking for disabled people;
Parking for disabled people;
Prohibited areas—entrances, green areas, obstacles;
Supply (with authorization);
Reserved parking spaces—doctors, restaurants, shops, etc.;
Reserved parking space for a contract/state administration institutions—courts, police, etc.;
Turn parking;
Turn parking with time limitation and authorization (visits);
For motorcycles;
Closure to residential parking–block cleaning, closing off, etc.
Each base layer polygon has its attribute table, which contains the object identification, time validity, city area, zone type, standing type (longitudinal, perpendicular, oblique), paid parking area designation, street network location, operating time according to the vertical road sign, parking spaces, editing history, etc. These polygons represent the entire parking space, which is usually a few parking spaces.
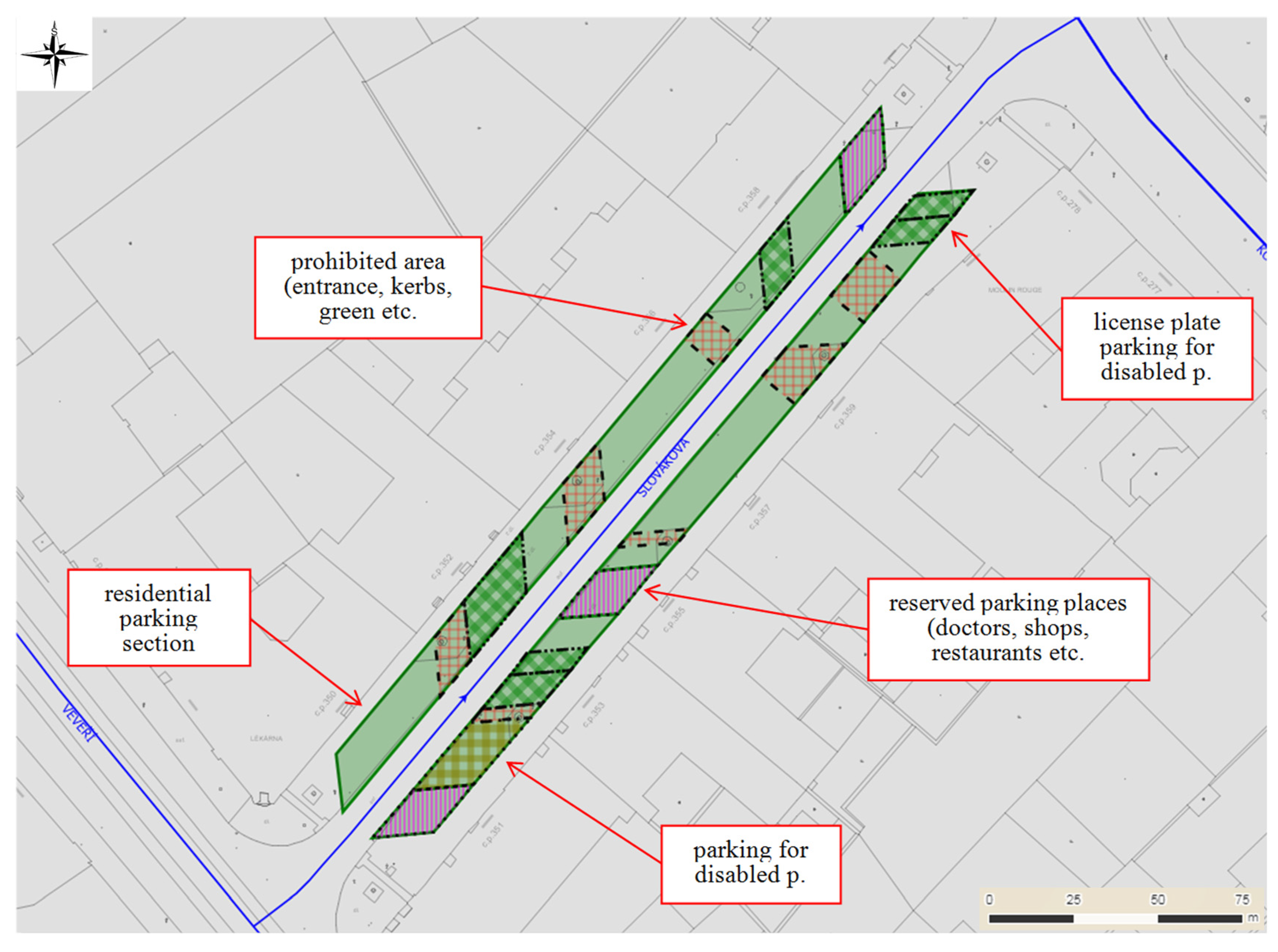
Figure 3 shows an excerpt from a GIS Transport section designed by CDSw in the GISServer on the NexusDB platform.
There are sections of residential parking (fully green), forbidden areas, greenery, etc. (filler—brown grid), disabled places for a specific license plate (green grid), reserved parking places for doctors, restaurants, shops, etc. (purple hatch).
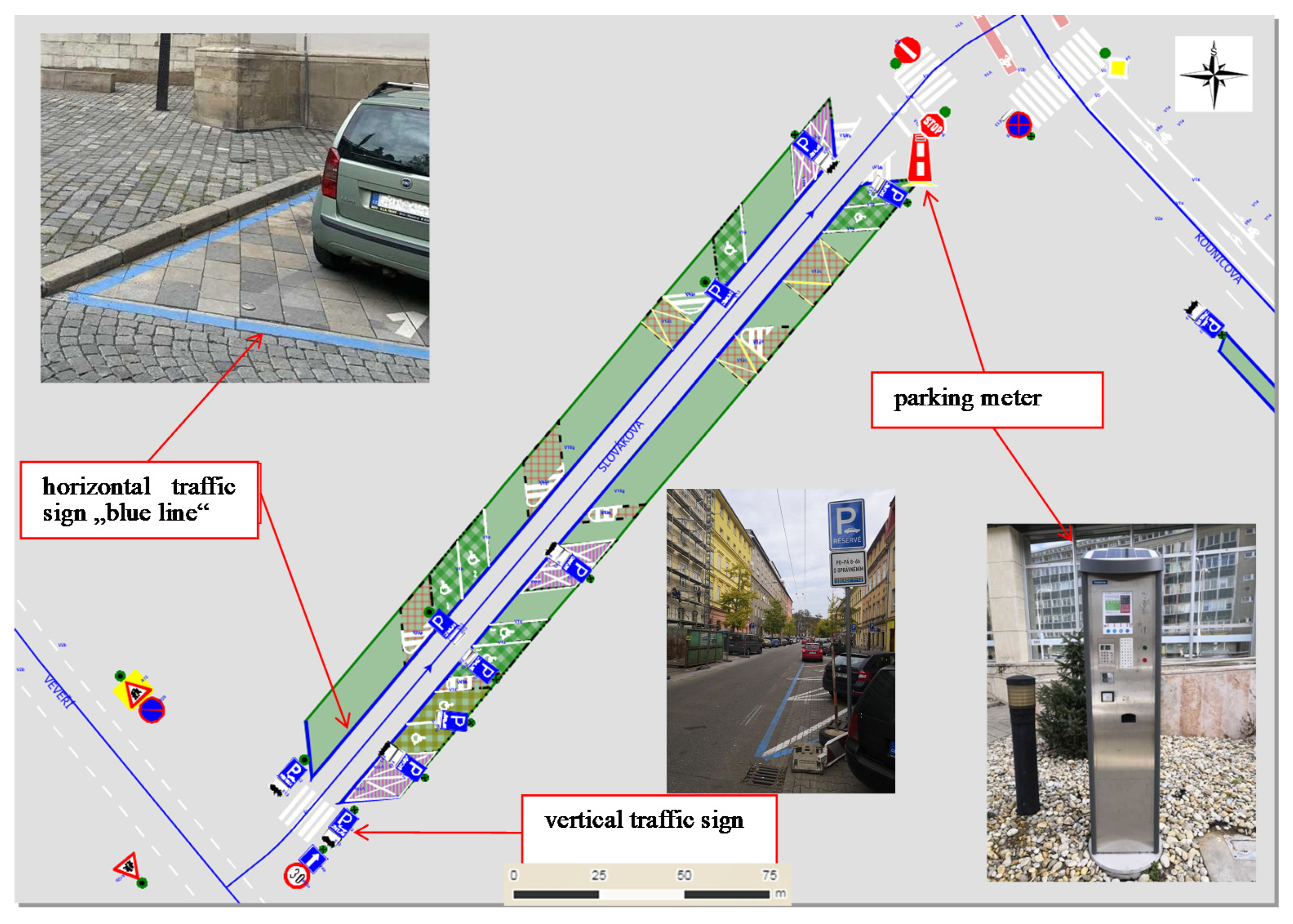
Figure 4 shows a view of the GIS Transport section with additional vertical traffic signs (traffic sign symbols) and a photograph of the parking meter and a vertical traffic sign indicating the parking area in the terrain that is part of the data stored in the database. There is also an example of a photograph of a border of a parking area in the terrain with blue lines. The vertical traffic sign is registered in the Transport application by a point element, with the cell displayed according to the created style in its actual form. An important item of traffic sign attributes is the validity that uniquely links the sign with the resident parking system. Sign attributes, like parking meters, contain a link to photo documentation of the sign in the field. Taking photo documentation, an essential part of the control data, is facilitated by the mobile application from CDSw company (San Diego, CA, USA), Praha, CR. This allows you to take photos of traffic signs through smart phones and assign them to the appropriate point in the Traffic app, so the operator will record the change and can respond to the change. If a new sign is taken, its photo can be assigned to a photo-point with coordinates found by the mobile, and the operator at the PC then assigns photo documentation to point attributes after creating the tag’s data point.
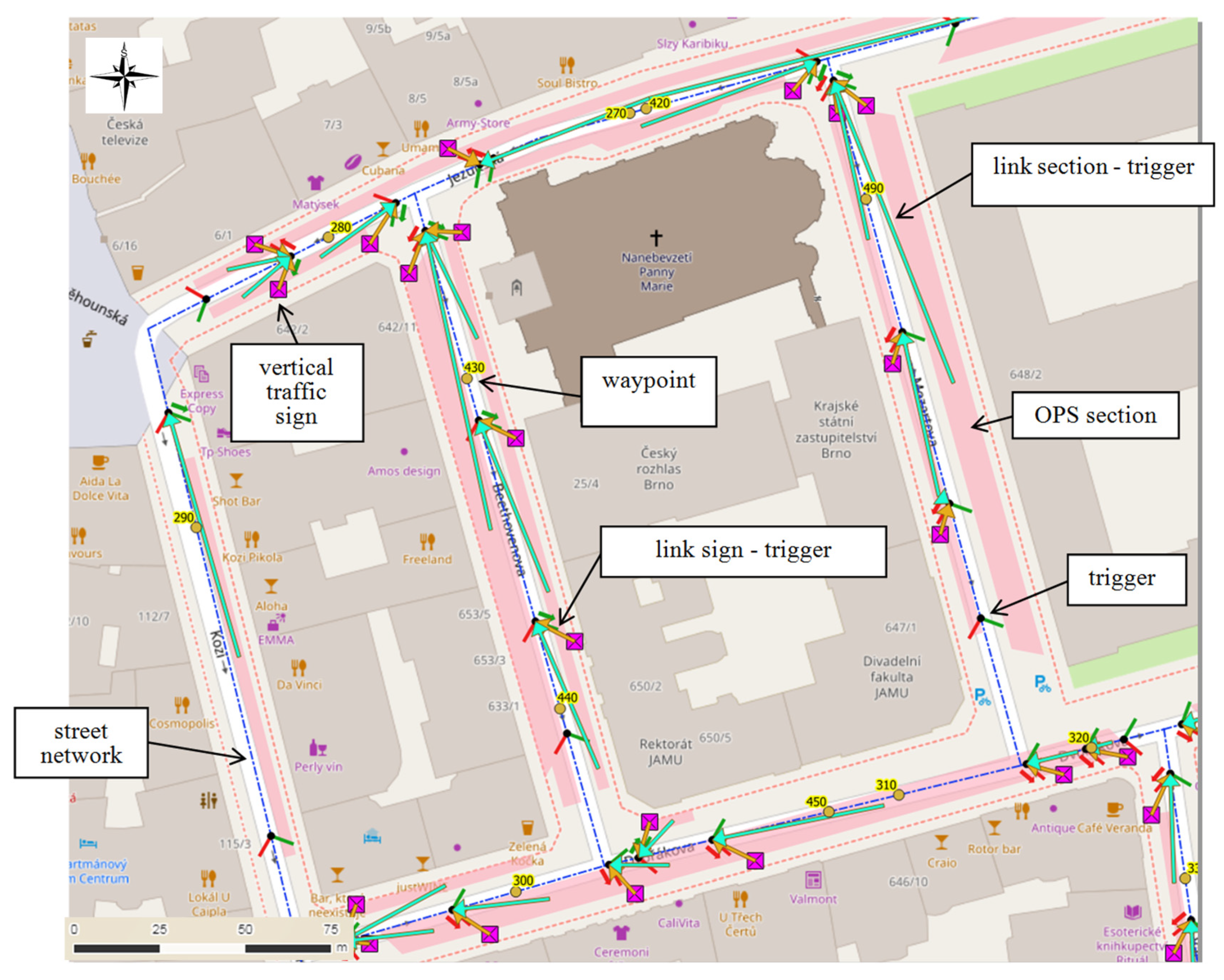
An example showing how to locate the control data is shown in
Figure 5. This illustration shows street polygons, control points, vertical traffic signs, and triggers. Paid parking areas are highlighted in pink.
Monitoring control data includes so-called monitoring triggers, links between triggers and traffic signs, routes and points, including a street network. Monitoring control data is an important part of the entire system. Monitoring triggers are points with certain coordinates that trigger and stop monitoring when the monitoring car is in the same position. The trigger also contains parameters for a particular section of the pay-per-area section, for example, the type of parking. This allows the recognition process to estimate the angle of rotation of the registration number of the parked cars relative to the monitoring vehicle, thereby increasing the chance of it being correctly recognized from the camera image taken by the camera. The monitoring trigger also includes a preset azimuth under which the vehicle must be moved to trigger the monitoring. Triggers also stop monitoring at the end of the street to avoid recording vehicles outside the pay zone. Links between triggers and traffic signs give a more accurate pairing of road marking documentation and parked vehicle documentation. These are the lines between the trigger and the polygon, representing the parking space in the paid parking area or between the trigger and the vertical traffic sign.
The background data (signs and sections of paid parking) prepared in this way enter the GIS system SOBD, which uses two PostgreSQL™ databases. This is the SOBD database and the Monitoring Data (MONDATA) database. Data management is then performed through the open source geographic information system QGIS™. Data embedded in the SOBD database is synchronized with the MONDATA database data and vice versa, with set rules for editing. The MONDATA database is designed to create and edit triggers, links, waypoints, and street network lines. Some data, such as the attributes of monitoring cars, the drivers of these cars and routes, are without geometry. All this data is necessary and after connecting the monitoring car in the garage to the computer network, this data is inserted into the server in the car.
4.1. Field Data Collection
Figure 6 shows a monitoring vehicle equipped with a camera system. It is a hybrid car equipped with a camera system with control and storage equipment. Control monitoring is performed over defined routes. The number of vehicle plates in residential parking spaces are also recorded, as are traffic signs defining or specifying parking in these parking areas. The result of this recording system is documentation, i.e., photographs in digital form with a mark containing the date and time of the acquisition. Photos are taken five times per second. Stop and start monitoring is automated thanks to the parameters specified for each route.
The data is generated as the output from the GIS data base of the Brněnské komunikace (BKOM) data manager. All control data is managed in the QGIS geographic information system. Spatial static data is stored in the SOBD database; spatial dynamic and attribute data is stored in the MONDATA database to monitor parking rules. A field monitoring unit is a monitoring car equipped with cameras and a software server. Field data and documentation is sent to the server and evaluated. In addition to the monitoring vehicle, data from parking meters are transferred to the database. If a violation of the parking rules is found in the evaluation, the documentation together with the data is sent to the database of potential offenses and the municipal police then deal with the offense. Acquired data are subject to regulation by the EU General Data Protection Regulations (GDPR).
The data server is accessed by data from parking meters (number plates of parking cars and paid parking time) and is used to update the control data of the monitoring vehicle. The SOBD database generates potential offenses data, which is evaluated by the Municipal Police. Police evaluate offenses on the basis of registration plate number (RZ) and other parameters (color, etc.) obtained from image and text recognition and evaluate the quality of the recording material in terms of the legal enforceability of the offense.
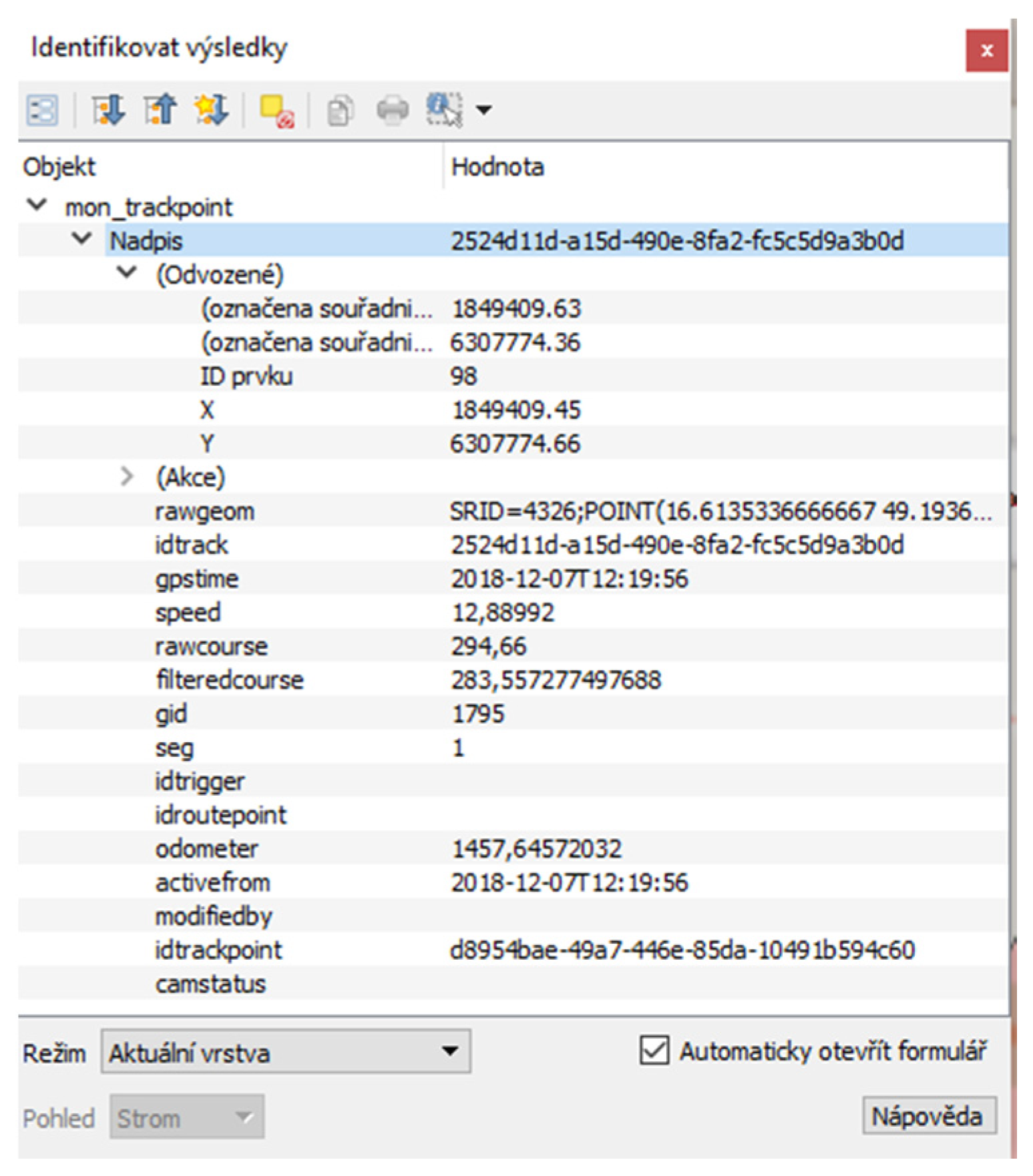
An example for displaying the saved track of the monitoring vehicle in the form of TrackPoints in the GIS is shown in
Figure 7; an example for displaying TrackPoint attributes from a database is shown in
Figure 8.
Routes are used to ensure complete coverage of the site. Each route consists of waypoints whose serial numbers provide navigation to the driver as they drive through the streets. The waypoints, as well as triggers, are registered by the system using GNSS positioning. Occasionally, it is necessary to travel several times so that the monitoring vehicle passes through all the streets with parking areas within the paid parking area. This is especially true for one-way streets. The data also includes a street network, which is represented by line elements that contain topographic information. Monitoring triggers and waypoints are designed to lie directly on the line.
TrackPoints are snapped onto lines representing a street network using an algorithm to obtain information from a monitoring trigger or a waypoint. Therefore, if there is a trigger or a waypoint at the origin of the TrackPoint, this information is also written to the TrackPoint. Once identified in the GIS software, you can view the point attributes. It is essential to have an existing unique attribute item within the point (record) identifier.
Data generated during operation of the monitoring vehicle are generated in addition to the camera records and so-called “Tracks” and “TrackPoints”, vehicle position records and other data. Individual tracks (rides) contain a set of TrackPoints, i.e., records of the monitoring car’s GNSS position. Furthermore, the track stores information about the driver, the monitoring car, the defined route, the time of the journey, the number of registered registration plates of parked vehicles and more. TrackPoints—that is, individual points—store a specific driving identifier and obtain detailed information that is stored five times per second. This information includes the position, direction of movement, speed, time, and more.
The monitoring vehicle carries out monitoring and documentation based on control data. The data is stored in a database on a server located inside the car. The database can be managed directly on the car’s server via remote access, but a database located on the local server of Brno’s communication network is used by default and data synchronization of both servers is started after the monitoring car is connected in the garage.
The functionality of the parking system is ensured by checking its compliance with the set rules. These are based on traffic signs and the public decree of the city of Brno. Random checks are carried out by the Municipal Police on the basis of patrols or on the basis of a notice. The systematic technological control is then carried out by the monitoring car, which passes through the streets, falling into the areas of resident parking several times a day.
4.2. Analysis and Methods of Data Evaluation
The passage of the monitoring vehicle is controlled by an algorithm based on graph theory. It is a modified Chinese postman algorithm (The Chinese Postman Problem) with restrictive conditions resulting from traffic signs, with a required time interval of 30 min to capture repeated data, and normal traffic density parameters.
The output of data evaluation is the identification of an offense against parking rules and generation of the necessary documentation on the offense for administrative proceedings via the municipal police. A general mathematical model for evaluating the parking rule is applied for evaluating the data and identifying the offense. The last two items are the subject of this article. The model concept is based on a set of rules on parking that have been approved by the competent administrative authority. Mathematically, we can express the model by function P. It is a Boolean function that depends on the specific area (grounds) A and looks like this:
where
r ∈ R is the vehicle registration plate number,
l ∈ L is the parking area (parking place),
t ∈ T is the date and time of parking.
Index A of function P in Equation (1) means that there are different parking rules in each area. If the PA function is True, then the vehicle with the registration plate r is parked at l at a given time t in accordance with the rules, If the PA is False, then a rule violation is suspected. The aim is to address the control of the established parking rules in the given areas A and their localities L. The checks will be in two ways:
Systematically (by automation), using a monitoring system whose data and documents will be evaluated in appropriate software;
Randomly, by the city police lineman.
The monitoring is then carried out on the basis of this data. They determine at which point which camera starts recording and navigate the driver’s route. The monitoring results (tracking and TrackPoint records) are transferred to the MONDATA database after connecting the control car in the garage to the computer network. At the same time, the process of automated evaluation of scanned photographic documentation is performed by means of scripts, which ensure the comparison between the individual parking places on the traversed route and attributes of polygons from the SOBD database at the time of scanning. During this process, the photographic documentation showing parking spaces that were not regulated by the resident parking system at the time the monitoring car passed by, i.e., outside the time stamp on the traffic sign indicating the residential parking area, will be deleted. These are mainly parking places where the reserved parking regime is valid for a part of the day, and parking places for disabled people, places of entry, sections of block cleaning, etc. The evaluation uses the position and time of the control vehicle at the time of recording. This information is part of the scanned data (TrackPoints).
5. Results
After completing this data evaluation process, the next phase of comparison is followed, where the remaining photo documentation is subjected to the automated license plate recognition of the parked vehicles, and then these license plates are compared with the SOBD database, which includes information on vehicle registrations parked in regulated resident parking lots. The insertion of their car’s license plate into the system is done by drivers when parking in a parking meter or mobile application.
The documentation (in which the registration number of the parked car is not stored) in the SOBD database, together with the identification data of the record and photographic documentation of the traffic sign to which the potential offense was related, is submitted to the Municipal Police for review. If it is found to be a misdemeanor, it is sent to the Department of Transport Administration Activities of the City of Brno (MMB). The time between two consecutive passes of the monitoring vehicle is a minimum of 30 min. If the same parked vehicle is identified on both records, it is subject to analysis on the legitimacy of its parking.
Technical support of the system (service of monitoring vehicles and data server administration) is provided by Eltodo, Praha, CR, the stock company.
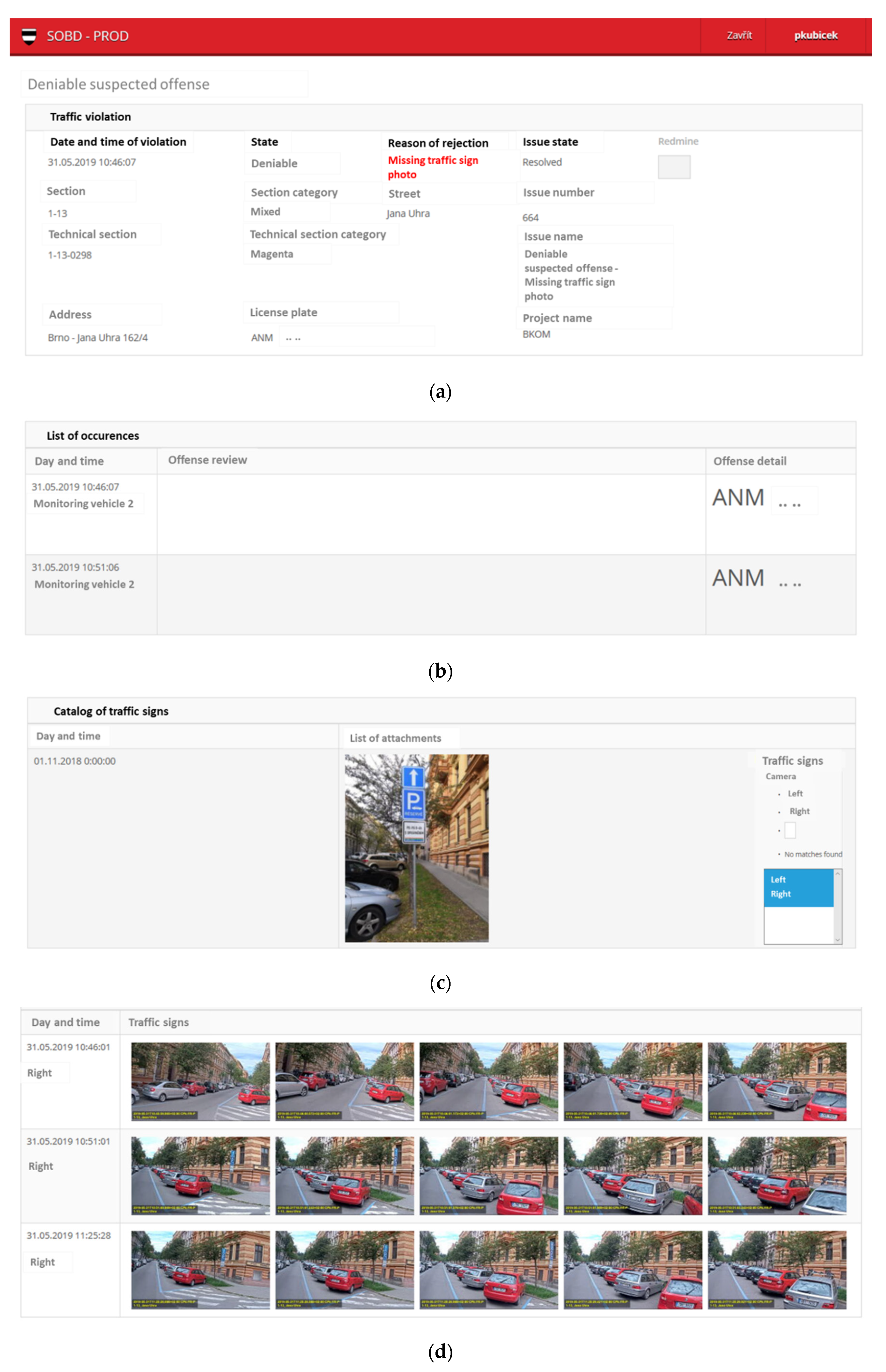
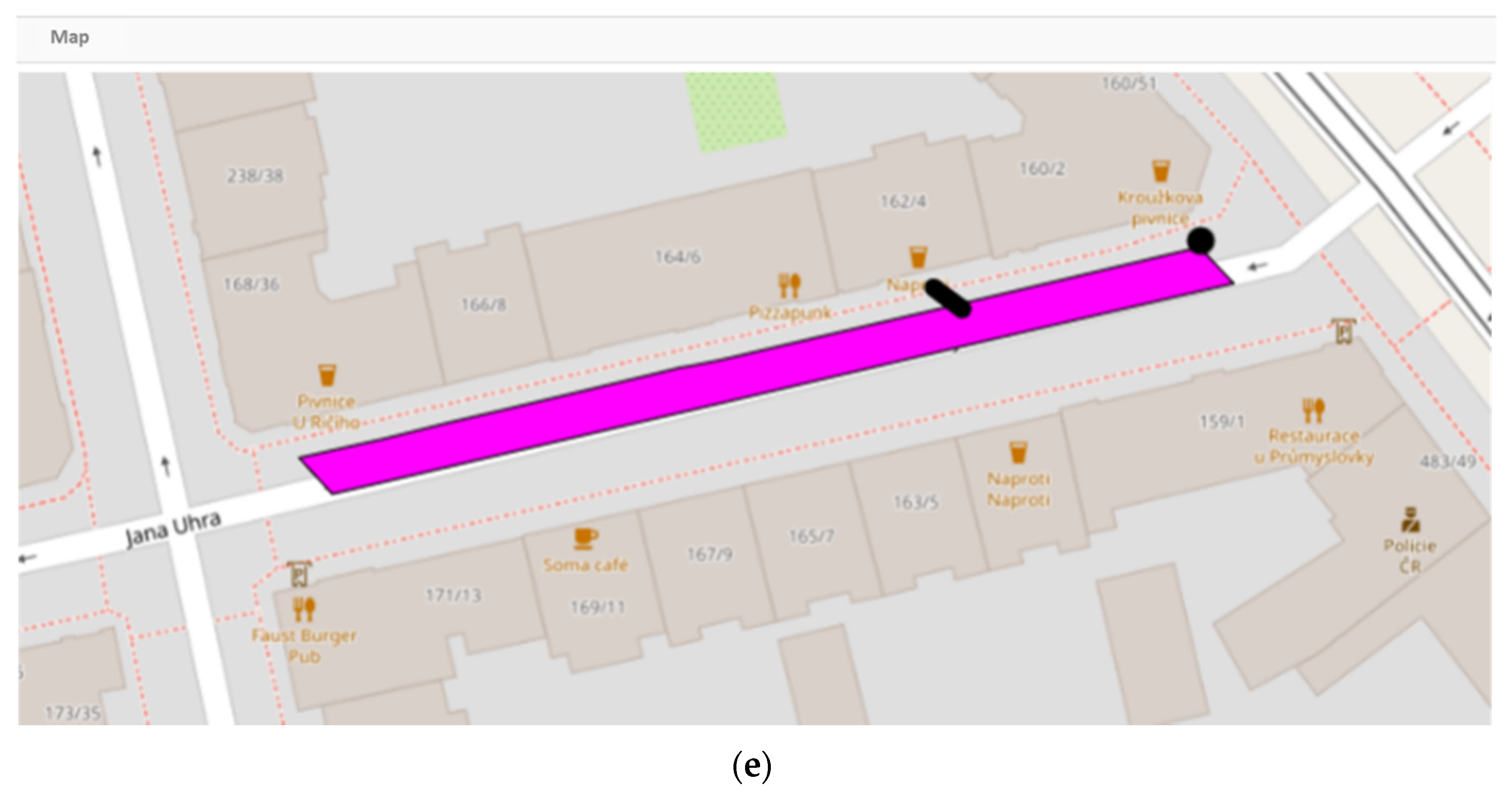
In
Figure 9a–e is an example of the output of the web documentation of suspected offenses against residential parking generated from the SOBD system for the municipal police. Some data are anonymized for privacy reasons (GDPR). The key part is the photo documentation (
Figure 9d) and text with image analysis of the identified license plate (
Figure 9b) of the vehicle during the first and second passage. The Municipal Police can choose from more photographs than the specified ones to be included in the offense report. It has a similar structure to this document, but is supplemented by vehicle data obtained from the vehicle register and its owner and specification of the legal provision of the offense. This protocol shall be sent to the owner of the vehicle through the competent authority.
For undeniable image documentation, it is important that in both series of photographs taken after a minimum of 30 min of each pass, a traffic sign indicating the parking area (
Figure 9c) is identified based on the satellite location of the route with the marker kept in that place in the SOBD database. In terms of GNSS localization requiring a free horizon for satellite signal reception, it has often been the case in dense urban areas that localization accuracy has been reduced or even GNSS signal reception has been interrupted, causing problems with mobile camera recording. The incompleteness of the image data requires a repeated pass of the same street. In
Figure 9d is an example of an incomplete image sequence at the first pass (lack of a traffic sign image) that has necessitated a subsequent second pass, and a subsequent third pass after an offense was identified 30 min later.
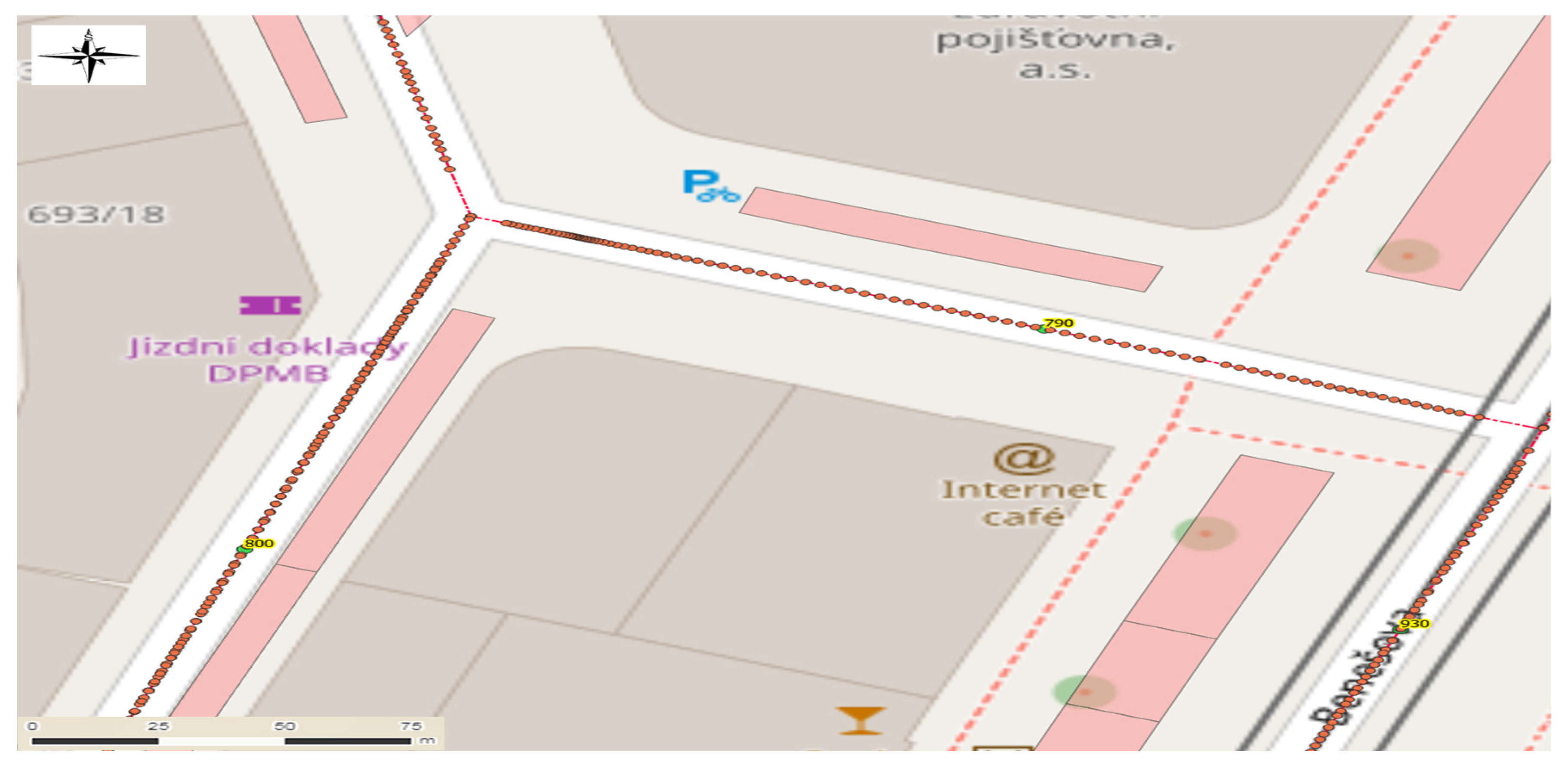
At the same time, the parking area is identified, and in the map section (
Figure 9e), the specific location of the standing vehicle suspected of a parking violation (short black line) and the corresponding traffic sign indicating the parking area (black dot) is marked.
In the initial phase of trial operation, the system showed up to 60%, in terms of legal enforceability, unrecognizable offenses. This high percentage was subjected to reverse analysis and was found to be due to several factors:
- -
The need to calibrate the system;
- -
The illegibility of the registration plate;
- -
Reduced visibility (snow, rain, fog, night);
- -
As a result of temporary traffic signs which are not part of the control data (temporary mobile road signs).
The need for system calibration was triggered by the uncertainty of the starting trigger location resulting from the uncertainty of vehicle positioning by GNSS due to the considerable obscurity of the horizon in dense buildings. This resulted in a shift in the image sequence in which not all the necessary objects were recorded for correct image evaluation (e.g., missing an appropriate vertical traffic sign or inappropriate camera angle). The problem was solved by changing the position of the trigger points in the control data by adjusting the orientation of the cameras on the vehicle, and refining the position was solved by using an Inertial Measurement Unit (IMU).
In
Table 1, the statistics document the benefits of system calibration by comparing the percentage of qualitative data improvement by the offense demonstrability parameter. After the calibration of the system, the quality of the monitored data was improved by 25% in terms of demonstrable offenses.
Table 2 shows in detail the structure of the percentage of the individual parameters in the proportion of data excluded due to the non-verifiability of the offense, which are still subject to improvement.
The seemingly high percentage of inadequate documentation for offense proceedings is due to a large number of limiting factors regarding the legal unquestionability of the offense. Failure to comply with any of them makes the offense ineligible.
6. Discussion
The main objectives of this project were to prevent long-term (in many cases unauthorized) parking of vehicles in the center of Brno city, thus blocking the parking capacity, and ensuring a sufficient number of parking spaces for Brno residents and visitors by increasing the turnover of parking, which was accomplished by the introduction of the parking system.
The whole technology is fully automated; the human factor enters the process in the initial phase of setting and modifying the parameters and then at the end in evaluating offenses in administrative proceedings. The benefit of the technology lies in the automated processing of a large number of records that could not be evaluated manually. Another benefit is to free the city center from long-term parked vehicles and increase parking availability.
Our solution utilizes the integration of image data referencing position and time by GNSS satellite technology, while utilizing database resources and Open Source GIS. The methods of graph theory and image recognition were used in algorithmization. In related works (Chapter 2), the methods of the Internet of Things (IoT) [
5,
22], were used in particular, while Machine Learning (ML) [
9,
12], and image processing were used [
11,
12], in other contexts than in our solution. The use of a modified Chinese postman algorithm (The Chinese Postman Problem) has proved to work best for our project.
From the perspective of those interested in parking, information is available on the website or in the mobile application about the availability of parking spaces at the place of need. The availability of parking information is now a frequently used IoT-based application.
The system of static cameras is used for the evaluation of vehicle entrances to the center through a mechanical barrier. For monitoring barrier-free parking spaces in urban conditions, the method of mobile monitoring has clearly proved its worth. The use of static cameras requires multi-angle shots, generating increased demands on the number and installation of cameras, but the success rate of image recognition is high and is up to 89% [
33,
34,
35].
The illegibility of the license plate is due to multiple factors, e.g., a dirty or missing license plate or one scanned at an unfavorable angle. The technology has only been operational for one year and is constantly being evaluated and improved. The main aim of the system is to force drivers to respect the parking rules.
Through the calibration process of the mobile parking monitoring system, the quality of data was improved from 28% to 35% in terms of provable offenses. We note that this percentage is made up of excellent data in terms of meeting all the necessary conditions for successful enforcement of offenses. In [
11], a similar improved success rate from 24% to 43% is reported. The error rate is very individual and depends on local conditions.
Brněnské Komunikace company, Brno, CR is the operator of the resident parking system, but the evaluation is automated and camera records are only available to the municipal police. This complicates the correct setting of control data, as GIS operators cannot access the monitoring car documentation for privacy reasons (according to GDPR), and the municipal police initiative is the only response for correcting settings.
The electronic availability of parking rule information via smart communication devices, which most people use, contributes to the acceptance of the whole system and its increasing popularity. A similar system of regulated parking also operates in the capital of the Czech Republic, Prague.
7. Conclusions
The article introduced a system for the intensive use of parking spaces. It is an automated system based on monitoring the situation in parking places using a mobile camera set equipped with data storage and means for data transfer to the central database. The data is evaluated in a suitable GIS-based software according to parking rules. It is this evaluation that is a critical part of the whole system. In practice, there have been cases where a complaint was sent to municipal police on parking rules violation, which was not fully justified. Therefore, the further development of the described system will be aimed at improving the evaluation process in order to minimize unauthorized cases. Detailed information about the parking system is very well presented on the web or in the form of a smartphone application [
36], which lists all the possible parking situations in Brno.
Prior to the introduction of the system, the parking yield was around 30% compared to the current situation after the introduction of the parking system.
In the city center, where the entrances are regulated by a bolt system, the use of static cameras is effective, while for the control of parking in the street network it is cheaper and more flexible in terms of video recording to use a mobile camera system on a vehicle.
The main benefit of the technical solution was the integration of image, location and time data acquired by a moving vehicle equipped with a camera system in combination with GNSS navigation technology.
After the introduction of a monitored parking system, the overall rate of violations of parking rules assessed from the records of offenses in the monitored areas decreased. The statistics of the municipal police show that, in 2019, parking was unjustified, on average, 10% of the time, with a monthly variability of 17% to 7%. Mobile data collection has a number of disturbances affecting the quality of data, and for the correct evaluation of offenses it is necessary to have flawless data. All formulated research goals were fulfilled and the GIS environment proved to be usable both for data integration and for their subsequent analysis and efficient distribution of purpose outputs.
The continuation of the research will consist of improving the data quality in statistically identified problematic parameters, especially license plate recognition, the problem of changes resulting from temporary traffic signs, and traffic in reduced visibility.
The introduction of a regulated parking system in the center of Brno and in the surrounding areas contributed significantly to improving the availability of parking for residents, subscribers and visitors. The system of parking houses and car parks will be gradually extended in the city of Brno, along with the modernization of the transport network. The new parking system offers many advantages. The goal is not to collect money purposefully, but to achieve effective renewal of parking, thus allowing more people to park and deal with the necessary issues. The limitation makes sense where residents have a problem with parking or where there is a day-to-day overpressure. In most of Brno, where a new system was introduced, regulation is only introduced at night. In the most critical places (the first two zones), there is regulation even during the day.
The City of Brno is working to make the most of the use of information technology in conjunction with smart communication devices and smart applications to improve city life.
With the introduction of the automated parking system in the city of Brno as the last part of the SOBD system, one of the important databases for the future possibility of intelligent communication between vehicles, solved in the project C-ROADS Czech Republic, was created.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}