The authors wish to make the following corrections to this paper [1].
In the original article, there was a mistake in Figure 9a,d as published. There are redundant marks that have not been found and deleted before in a and d of Figure 9. In order to ensure the precision of the article, correction is needed for the sake of rigor. The corrected Figure 9a,d appears below. The authors apologize for any inconvenience caused and state that the scientific conclusions are unaffected. The original article has been updated.
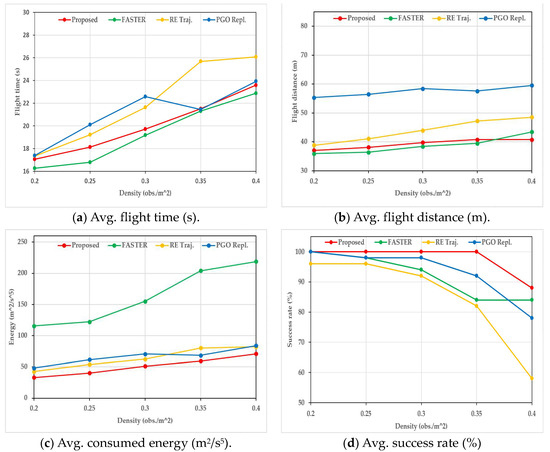
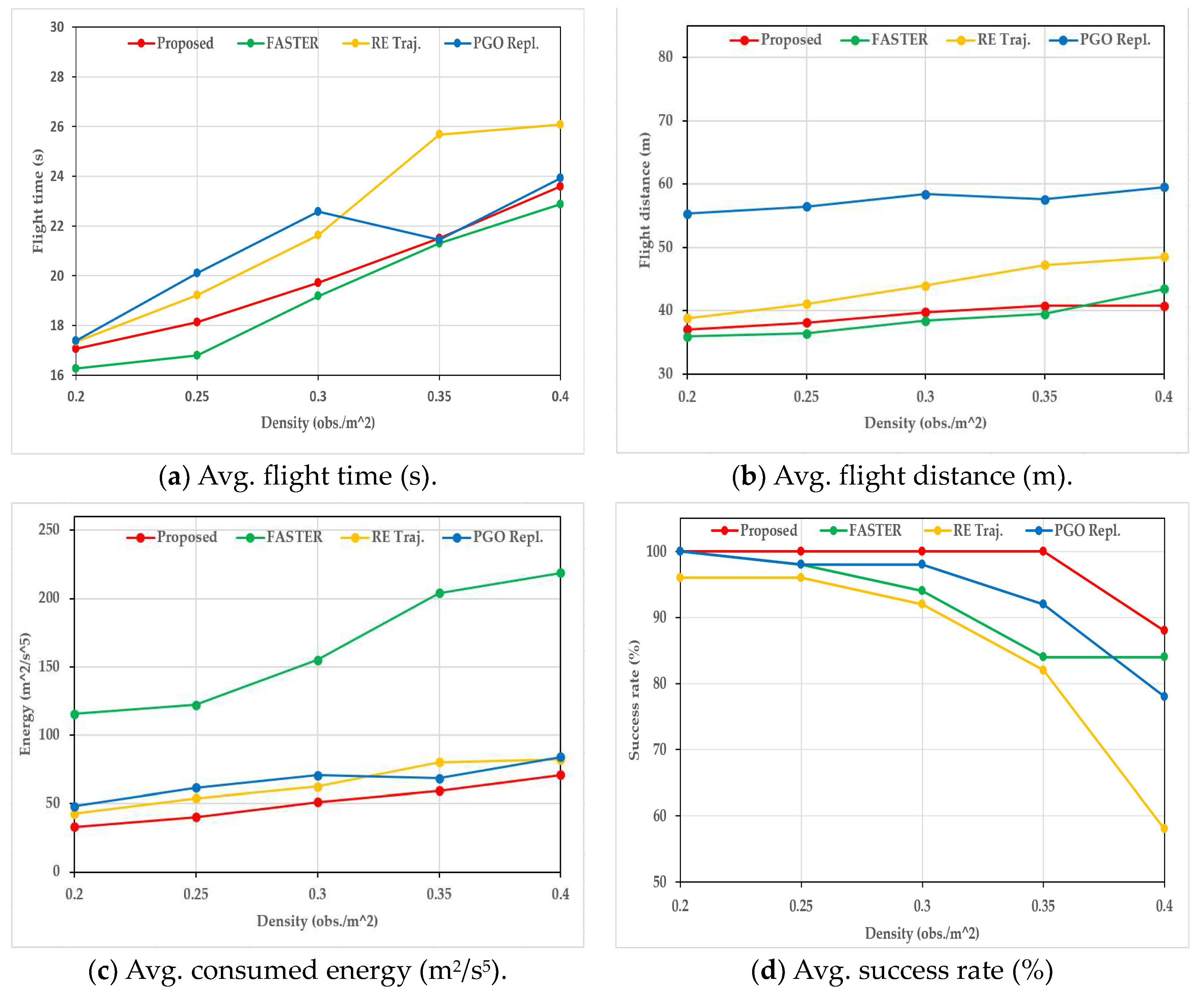
Figure 9.
Results of the comparisons between the proposed method and FASTER, RET, PGO in different obstacle densities.
Figure 9.
Results of the comparisons between the proposed method and FASTER, RET, PGO in different obstacle densities.
Reference
- Zhao, Y.; Yan, L.; Chen, Y.; Dai, J.; Liu, Y. Robust and Efficient Trajectory Replanning Based on Guiding Path for Quadrotor Fast Autonomous Flight. Remote Sens. 2021, 13, 972. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).