
Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods



Abstract

1. Introduction
2. Survey Categories, Specifications and Tools
2.1. Levels of Survey Scale
- Very small-scale surveys are mainly intended to cover the deep ocean depths, beyond 200 m, for a general knowledge of their topography and coastal areas where an exhaustive survey is not necessary, for example for reconnaissance surveys. In the case of general deep-sea hydrography, order 2 IHO may apply. In the coastal zone, it will be order 1b above 200 m depth. Very small-scale surveys can also be used to feed bathymetric data grids such as GEBCO (https://www.gebco.net/ (accessed on 9 July 2021)) or EMODnet (https://emodnet.eu/en/ (accessed on 9 July 2021)) [16]. The spatial resolution for GEBCO 2014 is 30 s arc, for GEBCO 2020 it is 15 s arc and for the European data portal EMODnet 1/8 min arc.
- The medium-scale survey includes coastal and reconnaissance surveys or deep surveys requiring a greater density of probes than the very small-scale survey. These surveys may require complete coverage and resolution in accordance with the specifications of order 1a IHO. These surveys are carried out either by airborne instruments in shallow water or with acoustic sensors whose characteristics depend on the requirements and the depth.
- Large-scale surveys provide higher resolution maps for areas of interest for navigation, environmental monitoring, protection of submerged cultural heritage, or installation of industrial infrastructures. The mapped areas are usually in the order of one square kilometer to a few dozen square kilometers. These surveys generally meet the special order specifications of the IHO S-44 [10] or IMCA S003 Guidelines standard [17]. They are usually carried out with high-frequency acoustic sensors, possibly coupled with underwater visual inspection.
- Very large-scale surveys are generally carried out to meet the need for one-off inspections of small areas of interest identified in previous surveys or to monitor the temporal evolution of sites. These surveys cover areas ranging from a few square meters to a few hundred square meters. The fields of application are varied, ranging from industrial metrology requiring measurement accuracies of the order of a millimeter to the cartography of a whole archaeological site for its three-dimensional digitization. The interest of these very large-scale methods is to generate full 3D models (i.e., to reconstruct the scene including areas not visible from above such as overhangs). We can thus use preferably the term of cartography, more relevant than that of mapping according to [18]. Tools such as close-range photogrammetry can be used to reconstruct complex habitats hosting erect species such as corals.
2.2. Why Is There Such a Difference between Aerial and Underwater Mapping
- Propagation losses due to geometric divergence. The emitted energy is distributed over an area that is increasingly larger as one moves away from the source;
- Absorption losses, mainly due to damping, which is highly dependent on the frequency of the wave and the characteristics of the environment (e.g., temperature, pressure, salinity).
2.3. Underwater Optical Survey Solutions, a Panel of Technologies
2.3.1. Remote Sensing—Satellite Mapping and Bathymetry
2.3.2. Aerial Survey, Sensors Embedded in a Flying Vehicle: Airplane, Helicopter or UAS
2.3.3. Submerged Sensors
Underwater Laser Line Scanner—A Spatial Discrimination Method
Close Range Photogrammetry
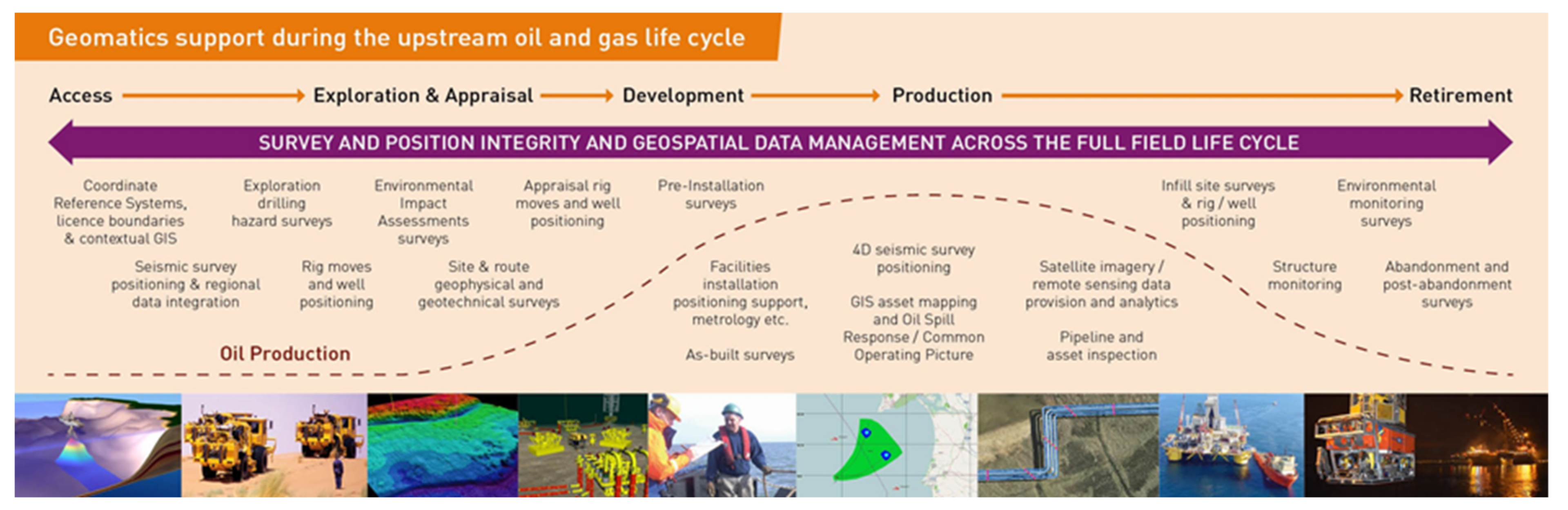
3. Survey in Oil and Gas Industry
3.1. A Chain of Successive Phases Requiring the Support of Geomatics
3.1.1. Exploration Phase
3.1.2. Appraisal Phase
3.1.3. Development Phase
- integrity of the coating;
- integrity, functioning and Eastings, Northings of all Cathodic Protection (CP) anodes;
- evidence of any anomaly such as damage to coating, anodes, obstructions or obstacles within the corridor;
- attitude, orientation, position and depth of any specific feature such as Subsea Distribution Unit;
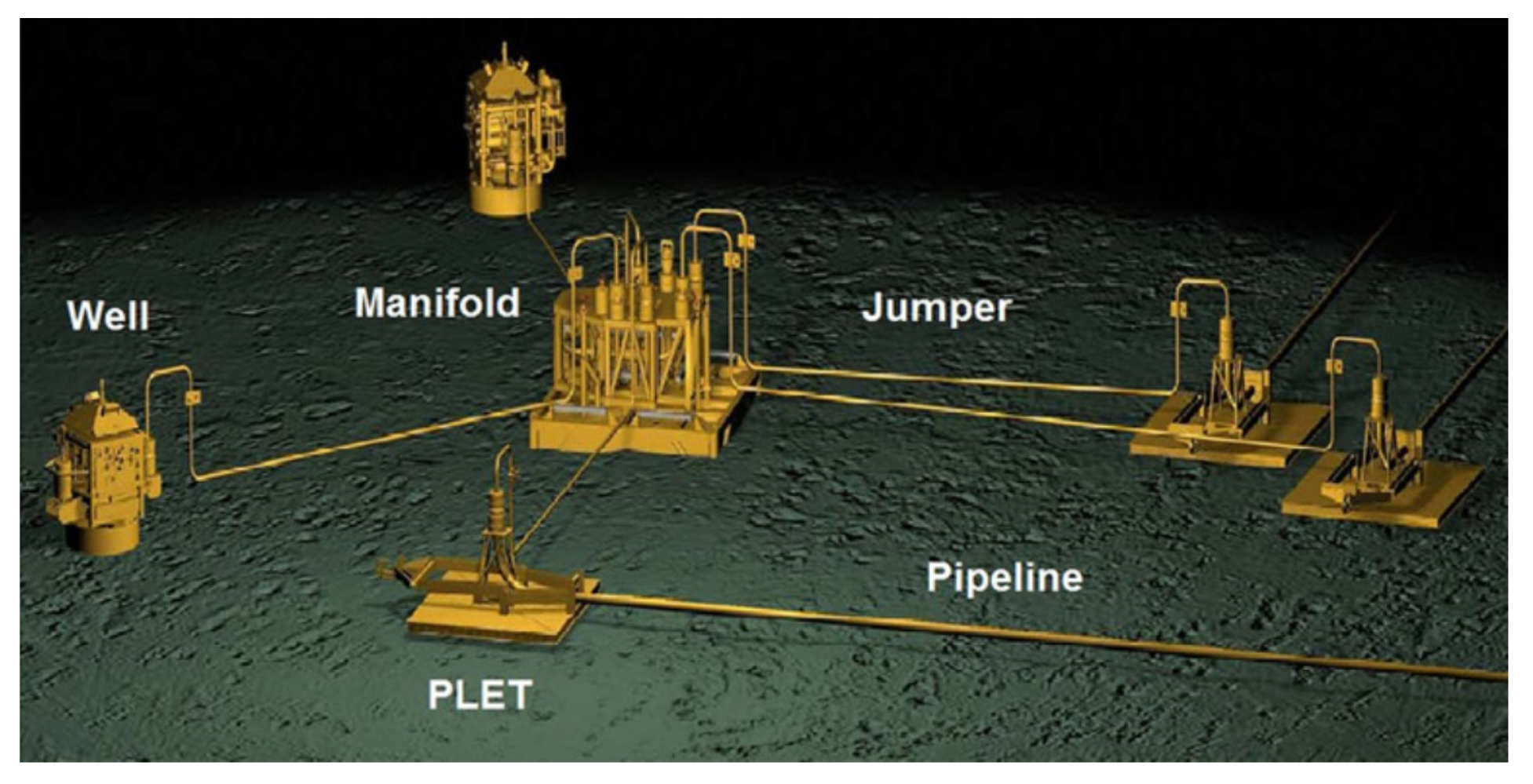
- (SDU), In-Line Tee (ILT), Flowline End Terminations (FLET), manifold, suction anchors, etc. (http://www.oil-gasportal.com/subsea-technology-and-equipments/ (accessed on 9 July 2021)) (https://oilstates.com/offshore/ (accessed on 9 July 2021));
- continuous Eastings, Northings, and depth of the sealine;
- relative position of sealine to seabed, identification of buried sections, free-spans; accurate identification, visual inspection and metrology of free spans (Kilometric Point (KP), length, max height, profile). This inspection is repeated once remedial work has been carried out.
- pipeline configuration i.e., X-, Y- and Z. coordinates of the pipelines, generally referred to the Top Off Pipe (TOP) or Bottom of Pipe (BOP);
- undisturbed sea bottom coordinates along and transversal to the pipeline route;
- anodes status and anticorrosion and concrete coating status along the pipeline route.
- To be able to detect a deviation (X, Y and Z) from initial route of +/−10 cm over 100 m length;
- repeatability of absolute position better than +/−2 m.
3.1.4. Production Phase
- wellhead and tree;
- flowlines/pipelines;
- risers;
- umbilicals, power cable, flying leads;
- high-Integrity Pressure Protection System (HIPPS);
- control and monitoring system;
- subsea processing equipment;
- subsea manifolds/structures, foundation.
3.1.5. Decommissioning Phase
3.1.6. Spool Metrology Is Still a Challenge
- Horizontal position and depth of the hubs;
- Hub-to-hub slant and horizontal distances (also called baseline);
- Hub-to-hub relative heading and attitude;
- Spool azimuth (i.e., the bearing of the spool from the hub) and angle of approach (difference between the spool azimuth and hub headings); seabed profile along the structure route.
3.1.7. IMR Surveys in Detail
- Magnetic sensors: Magnetic Flux Leakage (MFL). A MFL-pig measures changes in wall thickness from the inside of a pipeline made of a ferro-magnetic material;
- Ultrasound technology: Ultrasound technology (UT) is used as a pigging tool to measure the absolute thickness of the wall;
- Laser-Optical Inspection Tool: The laser-optical instrument provides an image of the inside wall of pipelines. Defects are thus identified in relation to their distance from the end of the pipeline (Kilometric Point) and can be measured in width, length and depth with an accuracy of 0.5 mm. This equipment can only be used in pipelines carrying transparent fluids and whose walls are clean of any residues;
- Geopig is a pig that measures the global curvature based upon gyro-technology. A geopig can measure the global curvature with a high accuracy.
- To assess the state of the cathodic protection (CP) and corrosion of equipment;
- Inspection of pipe coating structures for damage or cracks. If there has been an impact by falling an object, or handling equipment or dragging an anchor, fishing, etc.;
- Pipeline upheaval or lateral buckling, or other displacements. This type of inspection falls within the scope of the OOS survey described above;
- Inspection of flanges, hubs, condition of structures to which pipelines are connected that could indicate overstressing of pipes;
- Leak detection.
3.2. New Technologies to Support Close Range Surveys
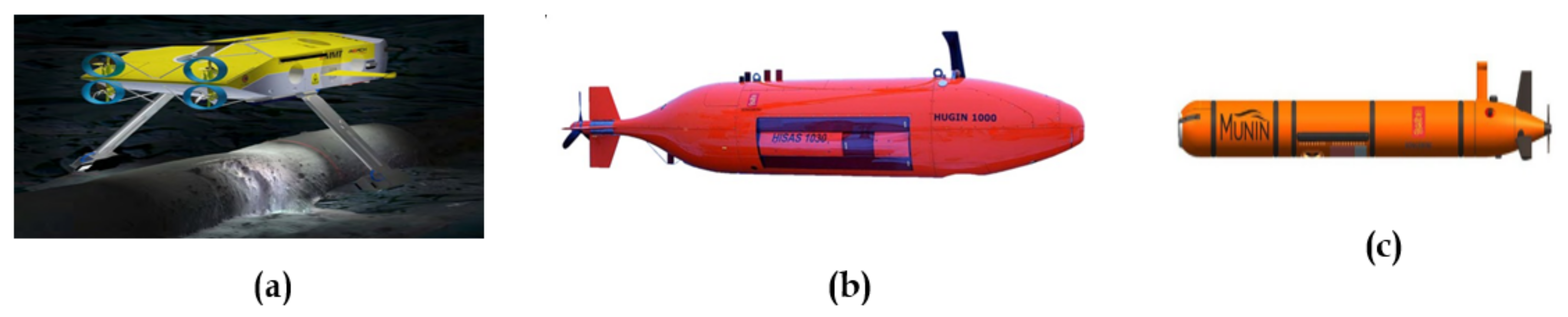
3.2.1. Towards Autonomous Underwater Vehicles

3.2.2. Moving to Optical Survey Solutions
3.3. A Growing Off-the-Shelf Product Offering
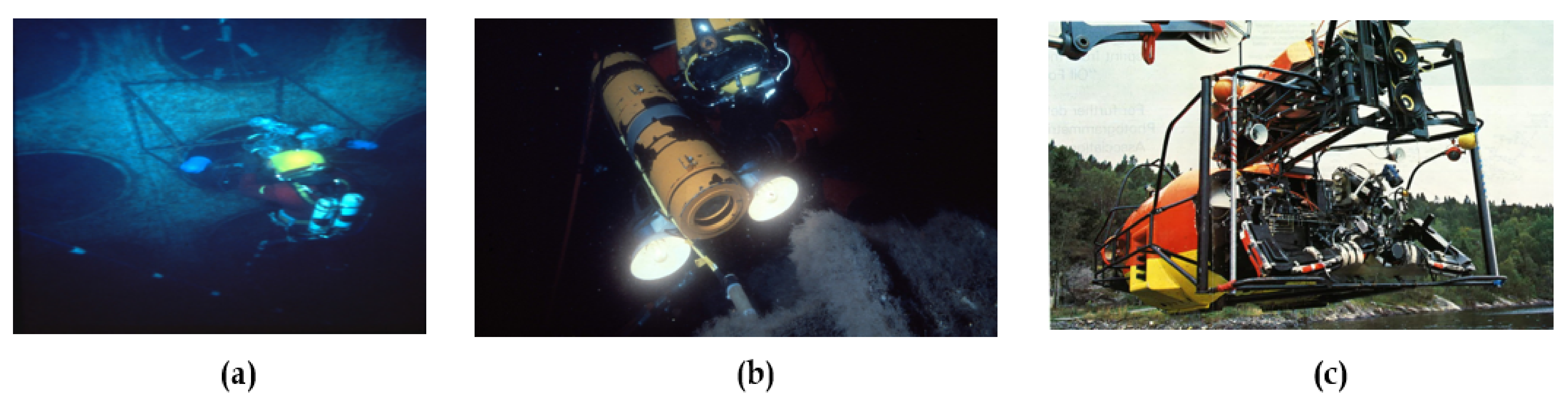
3.3.1. Some Archives from the Late 1970s
3.3.2. Close Range Photogrammetry, Turnkey Solutions
3.3.3. Subsea Laser Scanning Solutions
3.3.4. What about the System Qualification
4. Discussion: Are Underwater Optical Survey Solutions a Mature Technology for the Industry?
- Acquisition criteria: according to the size of the areas to be covered, the visibility conditions, the complexity and structure of the elements to be surveyed. The right settings have to be set as field of view, coverage rate and vehicle speed, minimum and maximum distance from the sensor to the scene, and the tolerance of the variation of this distance during the survey etc. The systems should be able to adjust these parameters during the survey according to the environmental conditions. Depending on the structures or the seabed texture, and particularly its homogeneity, the system has to extract features in any condition which requires high resolution sensors and an adaptation of the survey method (distance to the bottom, speed of displacement). The presence of moving objects may affect the survey. For example, the presence of algae or marine growth which can need a cleaning of the structures before scanning.
- Restitution criteria: Resolution, accuracy, and reliability are critical factors constraining the choice of sensors. Methods of calibrations as well as the tools for scaling or referencing the 3D reconstruction model in a fixed reference frame. The completeness of the survey and quality control require real-time indicators. Particular attention must then be paid to the reliability of these indicators to guarantee the quality of the result to be produced.
- Implementation criteria: Maximum depth of intervention, the mass and size of the system will determine the type of vector and therefore the vehicle to be used to carry out the survey. Energy consumption may also be a key criterion in the case of deployment on small remotely operated vehicles with an on-board power source, or on autonomous vehicles. Ease and speed of mobilization on standards vectors and mechanical and electrical interface are also constraints to be taken into consideration when preparing operations.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ABS | American Bureau of Shipping |
| ALB | Airborne Lidar Bathymetry |
| AHRS | Attitude and Heading Reference System |
| AIV | Automotive Intelligent Vehicle |
| API | American Petroleum Institute |
| AUV | Autonomous Underwater Vehicle |
| BIM | Building Information Model |
| BOP | Bottom of Pipe |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| CP | Cathodic Protection |
| CVI | Close Visual Inspection |
| DTM | Digital Terrain Model |
| EBS | Environmental Baseline Study |
| EIA | Environmental Impact Assessment |
| EMODnet | European Marine Observation and Data Network |
| FLET | FlowLine End Terminations |
| GCP | Ground Control Points |
| GEBCO | General Bathymetric Chart of the Oceans |
| GNSS | Global Navigation Satellite System |
| GVI | General Visual Inspection |
| GVI XTD | Extended Visual Pipeline survey |
| HIPPS | high-Integrity Pressure Protection System |
| HPS | High Precision Survey |
| IOGP | International Association of Oil and Gas Producers |
| IHO | International Hydrographic Organization |
| ILI | In-Line Inspection |
| IMCA | International Marine Contractors Association |
| IMR | Inspection, Maintenance and Repair |
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation Systems |
| IOC | Intergovernmental Oceanographic Commission |
| LBL | long baseline |
| LIDAR | Light Detection and Ranging |
| LLS | Laser Line Scan |
| MBES | Multibeam Echosounders |
| MFL | Magnetic Flux Leakage |
| NDT | Non-Destructive Testing |
| OOS | Out-Of-Straightness |
| PLET | PipeLine End Termination |
| PRC | Photo Realistic 3D Cloud |
| RBI | Risk Based Inspection |
| ROV | Remotely Operated Vehicle |
| RTM | Radiative Transfer Model |
| SDB | Satellite-Derived bathymetry |
| SHV | Seabed-Hosted Vehicles |
| SfM | Structure from Motion |
| SLAM | Simultaneous Localization and Mapping |
| SONAR | Sound Navigation and Ranging |
| ToF | Time of Fly |
| TOP | Top Off Pipe |
| THU | Total Horizontal Uncertainty, i.e., the XY value |
| TVU | Total Vertical Uncertainty, i.e., the Z/height value |
| UAS | Unmanned aerial system |
| UMEL | Underwater Marine Equipment Limited |
| UNESCO | United Nations Educational, Scientific and Cultural Organization |
| USBL | Ultra Short Base Line |
| UT | Ultrasound technology |
| UXO | Unexploded Ordnance Surveys |
| VSLAM | Visual Simultaneous Localization and Mapping |
References
- Delnero, P. A Land with No Borders: A New Interpretation of the Babylonian “Map of the World”. J. Anc. Near East. Hist. 2017, 4, 19–37. [Google Scholar] [CrossRef]
- Maury, M.; Lieut, L.L.D. Explanations and sailing directions to accompany the wind and current charts U. S. Navy. 7th Edition, Philadelphia: E. C. & J. Biddle, 1855. J. Frankl. Inst. 1840, 30, 420. [Google Scholar] [CrossRef]
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The Nippon Foundation—GEBCO Seabed 2030 Project: The Quest to See the World’s Oceans Completely Mapped by 2030. Geosciences 2018, 8, 63. [Google Scholar] [CrossRef]
- International Project to Chart the World’s Ocean Floor Announces Doubling of Data Available for Definitive Global Map. Library Catalog. Available online: www.gebco.net (accessed on 9 July 2021).
- Fu, W.; Ma, J.; Chen, P.; Chen, F. Remote Sensing Satellites for Digital Earth. In Manual of Digital Earth; Guo, H., Goodchild, M.F., Annoni, A., Eds.; Springer: Singapore, 2020; pp. 55–123. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics. Principles and Applications, 2nd ed.; Geophysical Sciences; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Tani, S. Understanding Oceans. The UNESCO Courrier 2017. Agenda 2030: Challenges for Us All. Available online: https://en.unesco.org/news/agenda-2030-challenges-us-all (accessed on 15 July 2021).
- Wölfl, A.C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor Mapping–The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- International Hydrographic Organisation. Manual on Hydrography (C-13), 1st ed.; May 2005 (Corrections to February2011); Report; International Hydrographic Bureau: Monaco, Monaco, 2011. [Google Scholar]
- International Hydrographic Organisation. IHO Standards for Hydrographic Surveys, 6th ed.; International Hydrographic Bureau: Monaco, Monaco, 2020. [Google Scholar]
- Menna, F.; Agrafiotis, P.; Georgopoulos, A. State of the art and applications in archaeological underwater 3D recording and mapping. J. Cult. Herit. 2018, 33, 231–248. [Google Scholar] [CrossRef]
- Green, J. Encyclopedia of Underwater Archaeology: Underwater Archaeology History and Methodology. Int. J. Naut. Archaeol. 2009, 38, 214–215. [Google Scholar] [CrossRef]
- Leon, J.X.; Roelfsema, C.M.; Saunders, M.I.; Phinn, S.R. Measuring coral reef terrain roughness using ‘Structure-from-Motion’ close-range photogrammetry. Geomorphology 2015, 242, 21–28. [Google Scholar] [CrossRef]
- Guo, T.; Capra, A.; Troyer, M.; Gruen, A.; Brooks, A.J.; Hench, J.L.; Schmitt, R.J.; Holbrook, S.J.; Dubbini, M. Accuracy assessment of underwater photogrammetric three dimensional modelling for coral reefs. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 821–828. [Google Scholar] [CrossRef]
- Nocerino, E.; Neyer, F.; Gruen, A.; Troyer, M.; Menna, F.; Brooks, A.; Capra, A.; Castagnetti, C.; Rossi, P. Comparison of diver-operated underwater photogrammetric systems for coral reef monitoring. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W10, 143–150. [Google Scholar] [CrossRef]
- Schmitt, T.; Weatherall, P. GEBCO and EMODnet Bathymetry Hands in Hands. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 15–19 December 2014; Volume 1. [Google Scholar]
- Makar, A. Positioning of Sounding Vessel in IHO S-44 Requirements. Eur. J. Navig. 2007, 5, 17–20. [Google Scholar]
- Lapaine, M. Mapping in Cartography. Proc. ICA 2019, 2, 1–3. [Google Scholar] [CrossRef][Green Version]
- Dong, L.; Li, N.; Xie, X.; Bao, C.; Li, X.; Li, D. A Fast Analysis Method for Blue-Green Laser Transmission through the Sea Surface. Sensors 2020, 20, 1758. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, X.; Wang, D.; Chen, H.; Zhan, C.; Ren, H. Researches on underwater transmission characteristics of blue-green laser. In Proceedings of the OCEANS 2014-TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Saylam, K.; Hupp, J.; Averett, A.; Gutelius, W.; Gelhar, B. Airborne lidar bathymetry: Assessing quality assurance and quality control methods with Leica Chiroptera examples. Int. J. Remote Sens. 2018, 39, 2518–2542. [Google Scholar] [CrossRef]
- Schechner, Y.; Karpel, N. Attenuating natural flicker patterns. In Proceedings of the Oceans’04. MTTS/IEEE Techno-Ocean’04, Kobe, Japan, 9–12 November 2004; Volume 3, pp. 1262–1268. [Google Scholar] [CrossRef]
- Rebikoff, D. History of underwater photography. Mus. Monum. 1972, 13, 193–203. [Google Scholar]
- Slater, D. Afocal viewport optics for underwater imaging. In Current Developments in Lens Design and Optical Engineering XV; Johnson, R.B., Mahajan, V.N., Thibault, S., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2014; Volume 9192, pp. 129–141. [Google Scholar] [CrossRef]
- Menna, F.; Nocerino, E.; Fassi, F.; Remondino, F. Geometric and Optic Characterization of a Hemispherical Dome Port for Underwater Photogrammetry. Sensors 2016, 16, 48. [Google Scholar] [CrossRef]
- Blais, F. Review of 20 years of range sensor development. J. Electronic Imaging 2004, 13, 231–243. [Google Scholar] [CrossRef]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging; De Gruyter: Berlin, Germany; Boston, MA, USA, 2013. [Google Scholar] [CrossRef]
- Jaffe, J.; Moore, K.; McLean, J.; Strand, M. Underwater Optical Imaging: Status and Prospects. Oceanography 2001, 14, 64–75. [Google Scholar] [CrossRef]
- Mariani, P.; Quincoces, I.; Haugholt, K.; Chardard, Y.; Visser, A.; Yates, C.; Piccinno, G.; Reali, G.; Risholm, P.; Thielemann, J. Range-gated imaging system for underwater monitoring in ocean environment. Sustainability 2018, 11, 162. [Google Scholar] [CrossRef]
- Caimi, F.M.; Dalgleish, F.R. Performance considerations for continuous-wave and pulsed laser line scan (LLS) imaging systems. J. Eur. Opt. Soc. Rapid Publ. 2010, 5. [Google Scholar] [CrossRef]
- Kocak, D.; Caimi, F. The Current Art of Underwater Imaging-With a Glimpse of the Past and Vision of the Future. Mar. Technol. Soc. J. 2005, 39, 5–26. [Google Scholar] [CrossRef]
- Kocak, D.M.; Dalgleish, F.R.; Caimi, F.M.; Schechner, Y.Y. A Focus on Recent Developments and Trends in Underwater Imaging. Mar. Technol. Soc. J. 2008, 42, 52–67. [Google Scholar] [CrossRef]
- Caimi, F.M.; Kocak, D.M.; Dalgleish, F.; Watson, J. Underwater imaging and optics: Recent advances. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–9. [Google Scholar] [CrossRef]
- Bonin, F.; Burguera, A.; Oliver, G. Imaging systems for advanced underwater vehicles. J. Mar. Res. 2011, 8, 23. [Google Scholar]
- Bianco, G.; Gallo, A.; Bruno, F.; Muzzupappa, M. A Comparative Analysis between Active and Passive Techniques for Underwater 3D Reconstruction of Close-Range Objects. Sensors 2013, 13, 11007–11031. [Google Scholar] [CrossRef] [PubMed]
- Massot-Campos, M.; Oliver-Codina, G. Optical Sensors and Methods for Underwater 3D Reconstruction. Sensors 2015, 15, 31525–31557. [Google Scholar] [CrossRef] [PubMed]
- Castillón, M.; Palomer, A.; Forest, J.; Ridao, P. State of the Art of Underwater Active Optical 3D Scanners. Sensors 2019, 19, 5161. [Google Scholar] [CrossRef] [PubMed]
- Piel, S.; Populus, J. Review of Standards and Protocols for Seabed Habitat Mapping; Technical Report Remote Sensing Techniques 1–5; MESH: Peterborough, UK, 2007. [Google Scholar]
- Mandlburger, G.; Pfennigbauer, M.; Schwarz, R.; Flöry, S.; Nussbaumer, L. Concept and Performance Evaluation of a Novel UAV-Borne Topo-Bathymetric LiDAR Sensor. Remote Sens. 2020, 12, 986. [Google Scholar] [CrossRef]
- Hodul, M.; Bird, S.; Knudby, A.; Chenier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Mavraeidopoulos, A.K.; Pallikaris, A.; Oikonomou, E. Satellite Derived Bathymetry (SDB) and Safety of navigation. Int. Hydrogr. Rev. 2017, 14. Available online: https://journals.lib.unb.ca/index.php/ihr/article/view/26290 (accessed on 9 July 2021).
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Review of near-shore satellite derived bathymetry: Classification and account of five decades of coastal bathymetry research. J. Ocean Eng. Sci. 2021. [Google Scholar] [CrossRef]
- Wettle, M. Satellite-Derived Bathymetry in Hydrographic Surveys. 2019. Available online: https://iho.int/uploads/user/Inter-Regional%20Coordination/RHC/SWPHC/SWPHC16/SWPHC16-16.2-EOMAP.pdf (accessed on 15 July 2021).
- Dierssen, H.M. Overview of hyperspectral remote sensing for mapping marine benthic habitats from airborne and underwater sensors. In Imaging Spectrometry XVIII.; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8870, p. 88700L. Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/8870/1/Overview-of-hyperspectral-remote-sensing-for-mapping-marine-benthic-habitats/10.1117/12.2026529.short (accessed on 9 July 2021).
- Rinner, D.I.K. Problems of Two-Medium Photogrammetry. Photogramm. Eng. 1948, 35, 275–282. [Google Scholar]
- Agrafiotis, P.; Georgopoulos, A. Camera Constant in the Case of Two Media Photogrammetry. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W5, 1–6. [Google Scholar] [CrossRef]
- Shan, J. Relative orientation for two-media photogrammetry. Photogramm. Rec. 2006, 14, 993–999. [Google Scholar] [CrossRef]
- Kotowski, R. Phototriangulation in multi-media photogrammetry. Int. Arch. Photogramm. Remote Sens. 1988, 27, 324–334. [Google Scholar]
- Fryer, J.G.; Kniest, H.T. Errors in depth determination caused by waves in through-water photogrammetry. Photogramm. Rec. 1985, 11, 745–753. [Google Scholar] [CrossRef]
- Shmutter, B.; Bonfiglioli, L. Orientation problem in two-medium photogrammetry. Photogramm. Eng. 1967, 33, 1421–1428. [Google Scholar]
- Tewinkel, G.C. Water Depths from Aerial Photographs. Photogramm. Eng. 1963, 29, 1037–1042. [Google Scholar]
- Agrafiotis, P.; Karantzalos, K.; Georgopoulos, A.; Skarlatos, D. Correcting Image Refraction: Towards Accurate Aerial Image-Based Bathymetry Mapping in Shallow Waters. Remote Sens. 2020, 12, 322. [Google Scholar] [CrossRef]
- Jaffe, J.S. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Bräuer-Burchardt, C.; Heinze, M.; Schmidt, I.; Kühmstedt, P.; Notni, G. Underwater 3D Surface Measurement Using Fringe Projection Based Scanning Devices. Sensors 2015, 16, 13. [Google Scholar] [CrossRef] [PubMed]
- Bruno, F.; Bianco, G.; Muzzupappa, M.; Barone, S.; Razionale, A.V. Experimentation of structured light and stereo vision for underwater 3D reconstruction. ISPRS J. Photogramm. Remote Sens. 2011, 66, 508–518. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Q.; Hou, Z.; Liu, Y.; Su, X. Three-dimensional shape measurement for an underwater object based on two-dimensional grating pattern projection. Opt. Laser Technol. 2011, 43, 801–805. [Google Scholar] [CrossRef]
- Karara, H.M. Handbook of Non-Topographic Photogrammetry; American Society of Photogrammetry: Bethesda, MD, USA, 1979. [Google Scholar]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.; Szeliski, R. Modeling the World from Internet Photo Collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- International Association of Oil and Gas Producers. Guidelines for the Conduct of Offshore Drilling Hazard Site Surveys; Technical Report 373-18-1; International Association of Oil and Gas Producers: London, UK, 2017. [Google Scholar]
- Cordes, E.E.; Jones, D.O.B.; Schlacher, T.A.; Amon, D.J.; Bernardino, A.F.; Brooke, S.; Carney, R.; DeLeo, D.M.; Dunlop, K.M.; Escobar-Briones, E.G.; et al. Environmental Impacts of the Deep-Water Oil and Gas Industry: A Review to Guide Management Strategies. Front. Environ. Sci. 2016, 4. [Google Scholar] [CrossRef]
- Sutton, C.; Mine, J.; Canovas, S. Environmental Baseline Surveys in Deep Waters: The Lessons Learnt Offshore West Africa. SPE-86775-MS. In Proceedings of the SPE International Conference on Health, Safety, and Environment in Oil and Gas Exploration and Production, Calgary, AB, Canada, 29–31 March 2004; p. 13. [Google Scholar] [CrossRef]
- Berry, M. Data Processing, GIS & Reporting. 2017. Available online: https://www.ths.org.uk/documents/ths.org.uk/downloads/hydrofest_presentation7_2017.pdf (accessed on 15 July 2021).
- Bai, Y.; Bai, Q. Subsea Engineering Handbook; Gulf Professional Pub: Burlington, NJ, USA, 2010; OCLC:ocn682920021. [Google Scholar]
- Schoellkopf, J. Review of methods for pipe walking and lateral/upheaval buckling detection Subsea inspection, maintenance and repair. In Proceedings of the Rio Pipeline Conference and Exposition 2010, Rio de Janeiro, Brazil, 13–16 September 2010; p. 5. [Google Scholar]
- Bruschi, R.; Vitali, L.; Spinazzè, M.; Bartolini, L.M.; Marchionni, L.; Crea, C.; Vichi, R.; Battistini, A. Out-of-Straightness Survey As An Engineering Tool for Integrity Management Of Offshore Pipelines Subjected to In-Service-Buckling. In Proceedings of the Rio Pipeline Conference and Exposition 2013, Rio de Janeiro, Brazil, 24–26 September 2013; p. 16. [Google Scholar]
- ABS. Subsea Inspection, Maintenance and Repair Advisory. In Technical Report TX 02/19 19016; American Bureau of Shipping: Houston, TX, USA, 2019. [Google Scholar]
- IMCA, International Marine Contractors Association. Guidance on Subsea Metrology; IMCA S 019; IMCA: London, UK, 2017. [Google Scholar]
- Menna, F.; Nocerino, E.; Nawaf, M.M.; Seinturier, J.; Torresani, A.; Drap, P.; Remondino, F.; Chemisky, B. Towards Real-Time Underwater Photogrammetry for Subsea Metrology Applications. In Proceedings of the OCEANS 2019-Marseille Reporter: OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Jørgensen, M.J.; Poulsen, N.K.; Larsen, M.B. Enhanced Subsea Acoustically Aided Inertial Navigation. Ph.D. Thesis, University of Denmark, Lyngby, Denmark, 2016. [Google Scholar]
- Bakare, A. Subsea Field Development: A Critical Review of Metrology Methods and Achievable Accuracies in Spool Tie-In Operations. Master’s Thesis, Subsea Engineering, The University of Aberdeen, Aberdeen, UK, 2013. [Google Scholar]
- Tomczak, A. Modern methods of underwater positioning applied in subsea mining. Górnictwo i Geoinz˙ynieria 2011, 35, 381–394. [Google Scholar]
- Menna, F.; Torresani, A.; Nocerino, E.; Nawaf, M.M.; Seinturier, J.; Remondino, F.; Drap, P.; Chemisky, B. Evaluation of vision-based localization and mapping techniques in a subsea metrology scenario. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W10, 127–134. [Google Scholar] [CrossRef]
- Det Norske Veritas AS. DNV-RP-F116 Integrity Management of Submarine Pipeline Systems. In Technical Report DNV-RP-F116; Det Norske Veritas AS: Bærum, Norway, 2015. [Google Scholar]
- Mai, C.; Pedersen, S.; Hansen, L.; Jepsen, K.L.; Yang, Z. Subsea infrastructure inspection: A review study. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 71–76. [Google Scholar] [CrossRef]
- Gordon, R.B. Considerations for mooring life extension. In The Society of Naval Architects and Marine Engineers; The Society of Naval Architects and Marine Engineers: Houston, TX, USA, 2015; p. 9. [Google Scholar]
- Gordon, R.B.; Brown, M.G.; Allen, E.M. Mooring Integrity Management: A State-of-the-Art Review. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2014. [Google Scholar] [CrossRef]
- Health ans Safety Executive. Remote Operated Vehicle (ROV) Inspection of Long Term Mooring Systems for Floating Offshore Installations; HSE Book RR1091; Health ans Safety Executive: Merseyside, UK, 2017. [Google Scholar]
- IMCA, International Marine Contractors Association. Code of Practice for the Safe & Efficient Operation of Remotely Operated Vehicles; Technical Report IMCA R 004 Rev. 3; IMCA, International Marine Contractors Association: London, UK, 2014. [Google Scholar]
- Capocci, R.; Dooly, G.; Omerdic´, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- Ledezma, F.D.; Amer, A.; Abdellatif, F.; Outa, A.; Trigui, H.; Patel, S.; Binyahib, R. A Market Survey of Offshore Underwater Robotic Inspection Technologies for the Oil and Gas Industry. In SPE Saudi Arabia Section Annual Technical Symposium and Exhibition; Society of Petroleum Engineers: Al-Khobar, Saudi Arabia, 2015. [Google Scholar] [CrossRef]
- Hagen, P.E. Pipeline Inspection with AUV: Operational Experience and Lessons Learned. Oceanology International; Kongsberg Maritime AS: London, UK, 2016; p. 39. [Google Scholar]
- Ling, D. AUV Pipeline Inspection; Society for Underwater Technology: London, UK, 2017. [Google Scholar]
- Oskarsson, O. Surveyor Interceptor Precision at Speed; Hydrographic Society, MMT: Oxon, UK, 2017. [Google Scholar]
- Schjølberg, I.; Utne, I.B. Towards autonomy in ROV operations. IFAC-PapersOnLine 2015, 48, 183–188. [Google Scholar] [CrossRef]
- Society for Underwater Technology. Resident Underwater Vehicles; Society for Underwater Technology: London, UK, 2018; Volume 12, pp. 26–49. [Google Scholar]
- Saipem. Sonsub Hydrone-R Launched in Water: The First Dive of Saipem’s Underwater Intervention Drone Has Made a Splash; Saipem: Milan, Italy, 2019. [Google Scholar]
- Leather, A.; Gayathiry, H. An Autonomous Underwater Vehicle Using Remote Piloting Technology via 4G Internet. 2019. Available online: https://www.sut.org/wp-content/uploads/2018/06/Aaron-Leather-v2-AUT-Freedom-Rev3-Final-Submission-draft-2-21.10.2019.pdf (accessed on 15 July 2021).
- Sevinc, D. uROV: A Digitally Enabled Platform for the Future of IMR. Soc. Underw. Technol. 2018. Available online: https://www.sut.org/wp-content/uploads/2018/05/014-uROV-A-Digitally-enabled-platform-for-the-future-of-IMR-D-Sevinc-One-Subsea.pdf (accessed on 9 July 2021).
- Drap, P.; Seinturier, J.; Hijazi, B.; Merad, D.; Boi, J.M.; Chemisky, B.; Seguin, E.; Long, L. The ROV 3D Project: Deep-Sea Underwater Survey Using Photogrammetry: Applications for Underwater Archaeology. J. Comput. Cult. Herit. 2015, 8, 1–24. [Google Scholar] [CrossRef]
- ZUPT. Visual Inertial Subsea 3D Reconstruction for Subsea Model Generation and Real-Time Positioning. 2018. Available online: https://www.zupt.com/wp-content/uploads/3D-Recon-Presentation.pdf (accessed on 15 July 2021).
- ORUS 3D Photogramétrie Sous-Marine-COMEX SA. 2020. Available online: https://comex.fr/orus-3d (accessed on 9 July 2021).
- SubSLAM–Live 3D Vision. 2020. Library Catalog. Available online: www.rovco.com (accessed on 9 July 2021).
- Selim, A. Photo Realistic 3D Cloud of Points (PRC). 2016. Available online: http://www.mcsoil.com/wp-content/uploads/2017/12/MCS-Photo-Realistic-Cloud-of-Points-Presentation.pdf (accessed on 15 July 2021).
- International Hydrographic Organisation. IHO Standards for Hydrographic Surveys, 5th ed.; International Hydrographic Bureau: Monaco, Monaco, 2008. [Google Scholar]
- Bartoli, D.; Capulli, M.; Holt, P. Creating a GIS for the Underwater Research Project “Anaxum”: The Stella 1 Shipwreck. CEUR Workshop Proc. 2012, 948, E1–E9. [Google Scholar]
- Ferreira, F.; Machado, D.; Ferri, G.; Dugelay, S.; Potter, J. Underwater optical and acoustic imaging: A time for fusion? A brief overview of the state-of-the-art. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IHO Reference | Criteria | Order 2 | Order 1b | Order 1a | Special Order | Exclusive Order |
|---|---|---|---|---|---|---|
| Chapter 1 | Area description (Generally) | Areas where a general description of the sea floor is consider adequate. | Areas where underkeel clearance is not considered to be an issue for the type of surface shipping expected to transit the area. | Areas where underkeel clearance is considered not to be critical but features of concern to surface shipping may exist | Areas where underkeel clearance is critical | Areas where there is strict minimum underkeel clearance and maneuverability criteria |
| Chapter 2.6 | Depth THU [m] + [% of Depth] | 20 m + 10% of depth | 5 m + 5% of depth | 5 m + 5% of depth | 2 m | 1 m |
| Chapter 2.6 Chapter 3.2 Chapter 3.2.3 | Depth TVU (a)[m] and (b) | a = 1.0 m b = 0.023 | a = 0.5 m b = 0.013 | a = 0.5 m b = 0.013 | a = 0.25 m b = 0.0075 | a = 0.15 m b = 0.0075 |
| Chapter 3.3 | Feature Detection [m] or [% of Depth] | Not specified | Not specified | Cubic features >2 m, in depth down to 40 m; 10% of depth beyond 40 m | Cubic features >1 m | Cubic features >0.5 m |
| Chapter 3.4 | Feature Search [%] | Recommended but not Required | Recommended but Not Required | 100% | 100% | 200% |
| Chapter 3.5 | Bathymetric Coverage [%] | 5% | 5% | 0% | 100% | 200% |
| Method | Description | Sampling Scale | Coverage (km2·h−1) | Resolution Horizontal (m) | Distance from Object | Technology | Comments | Scale Category | Ref to IHO S-44 Standard | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Very Small | Medium | Large | Very Large | |||||||||
| Satellite sensors | Satellite derived bathymetry: Multispectral-Photogrammetry | 1:100,000 to 1:30,000 | >1000 | 1000 to 10 | Alt Approx 200 km | Optic | Depending of technology and environmental conditions: sea surface, water turbidity | X | 2 to 1b | |||
| Airborne sensors | Airborne LiDAR Bathymetry (ALB) Aerial two media photogrammetry | 1:30,000 to 1:5000 | >10 | 10 to 1 | Alt Approx 300 m | Optic | Depending of Technology and environmental conditions: sea surface, water turbidity | X | X | 2 to 1a | ||
| Airborne sensors | Unmanned Aerial Vehicle (UAV) Borne bathymetry LiDAR | 1:10,000 to 1:1000 | <10 | <0.1 | Alt 50–150 m | Optic | Depending of Technology and environmental conditions: sea surface, water turbidity | X | X | 2 to 1a | ||
| Hydrograph acoustic sensors | Low frequency echosounder: single and multibeam, low frequency side scan sonar | 1:10,000 to 1:1000 | 5 to 100 | 100 to 1 | 100 m to 10,000 m | Acoustic | Large footprint due to large beam width | X | X | 2 to 1a | ||
| High resolution acoustic sensors | High resolution echosounder or side scan sonar, deployed from the sea surface in shallow water or embedded on underwater vehicle in deep water | 1:1000 to 1:100 | 1 to 5 | 10 to 0.01 | ×100 m | Acoustic | Angular resolution, directly function of the depth or range | X | X | 1a to special order | ||
| Visual inspection video camera | Underwater video camera | 1:100 to 1:10 | 1:100 to 1:10 | 0.1 to 0.001 | <10 m | Optic | X | X | NA | |||
| Underwater laser scanner | Ultra high resolution 3D modeling | 1:10 | <0.5 | 0.1 to 0.005 | <5 m | Optic | X | <special order | ||||
| Close range photogrammetry | Ultra high resolution 3D modeling | 1:10 | <0.5 | 0.01 to 0.001 | <5 m | Optic | X | <special order | ||||
| Type of Survey | Usual Methods | Resolution Spec. | Accuracy Spec. (°) | Optical Survey Solution |
|---|---|---|---|---|
| O and G Exploration—A general geomorphology map of the area is required to identify the sites of interest where drilling will be carried out. | ||||
| EBS | MBES and SSS Video transects | 1 to 10 m | 1 to 10 m | 3D reconstruction is not mandatory but Laser scanning or photogrammetry on specific area of interest for habitat monitoring could be useful |
| O and G Appraisal—It requires high-resolution “seabed survey” to determine its topology and identify potential geological constraints to the design of the field. It also includes “Debris” and “Route” surveys to detect any man-made or natural obstacle. UXO surveys can be also required. | ||||
| Seabed survey | MBES and SSS and Video survey | 0.50 m | 0.1 m | 3D reconstruction is not mandatory. Laser scanning or photogrammetry for object recognition could be useful |
| O and G Development—It includes a pre-lay survey along the pipeline or cable route prior to the installation. The deployment operation is monitored and possible damages are surveyed. The tie-in operation consists in connecting all the elements of the field. After the installation and before commissioning, an as-laid survey is carried out to verify compliance with the specifications. | ||||
| Pre-lay survey | MBES and SSS and Video survey | 0.1 to 0.5 m | 0.1 m | 3D reconstruction is not mandatory but Laser scanning or photogrammetry or object recognition could be useful |
| UXO survey | MBES-SSS-Gradiometer | 0.1 m | 0.01 to 0.1 m | 3D reconstruction is not mandatory. Laser scanning or photogrammetry for object recognition could be useful |
| Spool and jumpers metrology | Acoustic LBL-Inertial-taut wire-Photogrammetry | 0.001 to 0.01 m | 0.05 to 0.15 m/0.5 to 1° | Laser scanning coupled to an accurate Navigation system-Close range photogrammetry using reference or non-contact markers (suitable calibration procedure) |
| As laid/As built surveys | MBES on a ROV; Pipetracker; INS-DVL positioning system | 0.1 m | 0.01 to 0.1 m | Laser scanning-Close range photogrammetry |
| Out of Straightness (OOS) survey | MBES on a ROV; INS-DVL positioning system | 0.01 m | +/−0.1 m over 100 m-Precision better than 2 m | Laser scanning coupled to an accurate navigation system-Close range photogrammetry and fiducial markers |
| O and G Production—Inspection, maintenance, and repair (IMR) are key components of integrity management system. IMR surveys concern all the equipment installed on the seabed and are planned on the base of a risk assessment (risk based inspection, RBI). In-line, i.e., internal, and external verifications are scheduled. | ||||
| IMR-Dimensional Control | Video inspection | 0.001 m | 1/1000 relative to measured distance | Close range photogrammetry—High resolution laser scanning |
| O and G Decommissioning—It is prepared with an on-sire survey to check the state of the installations and establish tools and procedures for the disconnection and salvage operations. After removal of the structures from the bottom, a survey is realised to verify the absence of residues and assess the ecological status of the area. | ||||
| IMR-Dimensional Control | Video inspection | 0.001 m | 1/1000 relative to measured distance | Close range photogrammetry—High resolution laser scanning |
| Relative Distance (mm) | Relative Angle (Degrees) | ||||
|---|---|---|---|---|---|
| X | Y | Z | Roll | Pitch | Heading |
| 50 to 150 | 0.5 to 1.0 | ||||
| Method | Tools | Description |
|---|---|---|
| GVI | ROV or divers. | General Visual Inspection. External condition threats to the pipeline including coating/insulation damage, anode condition, leaks etc. |
| GVI XTD | Workclass ROV; 3-view digital video (left/center/right), digital camera, seabed transverse profiles (such as side scan or multi-beam sonar), CP (gradient and stab) and Pipe Tracker (depth of burial). | Extended Visual Pipeline survey giving detailed span profiles and depth of burial. Higher degree of precision with respect to positioning pertaining to the pipeline KP system. |
| CVI | Diver or workclass ROV | Close Visual Inspection. After cleaning step. The Establish a detailed inspection of an area of specific interest. |
| HPS | Workclass pipeline ROV, in conjunction with high accuracy calibrated positional equipment. | High Precision Survey. Determine the absolute position and relative year to year lateral movement of the pipeline on the seabed. |
| ILI | In-Line Inspection tool. | In-Line Inspection. Intelligent pigging of the pipeline. Utilizing various non-destructive testing (NDT) methods to measure continuous end to end pipeline wall thickness loss or pipeline anomalies/defects. |
| Monitoring | Following up of e.g., corrosion probes, impressed current system, process parameters, fluid composition, chemical injection, and monitoring of loads/stresses/strains/displacements or vibrations. | |
| Testing | System or function testing of equipment or control system. |
| Company Name | Product | Method | Range (m) | Max Depth Rate (m) | Resolution (mm) | Accuracy | Real Time Processing | Applications, Track Record & Qualification g |
|---|---|---|---|---|---|---|---|---|
| COMEX SA | ORUS3D | Photogrammetry Trifocal sensor | 0.5–3 | 6000 | 0.1 | 1/1000 | Yes-embedded | IMR, DIMCON, Spool metrology, OOS, Pipe inspection, Mooring line Inspection-BV Marine certification |
| ZUPT | 3D RECON | Photogrammetry Stereo and Inertial & IMU | N.A. | N.A. | N.A. | 1/1000 | Yes-embedded | IMR, DIMCON, Under Hull Positioning, Augmented Reality, Spool metrology, Pipe inspection, Mooring line inspection |
| ROVCO | SubSLAM X2 | Photogrammetry Stereo | N.A. | 1000 | N.A. | 0.7/1000 | Yes-embedded | IMR, DIMCON, Spool metrology, Pipe inspection, Mooring line inspection |
| MCS Oil | Photo Realistic 3D Cloud (PRC) | Photogrammetry Stereo | N.A. | 1000 | N.A. | 1/1000 | No | IMR-Pipeline Reassessment and Life extension, Spool metrology, OOS, Pipe inspection, Mooring line inspection, Umbilical inspection, Subsea decommissioning survey, Mathematical volume Analysis for As-Laid As-Built and Pre Post trenching |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chemisky, B.; Menna, F.; Nocerino, E.; Drap, P. Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods. Remote Sens. 2021, 13, 2789. https://doi.org/10.3390/rs13142789
Chemisky B, Menna F, Nocerino E, Drap P. Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods. Remote Sensing. 2021; 13(14):2789. https://doi.org/10.3390/rs13142789
Chicago/Turabian StyleChemisky, Bertrand, Fabio Menna, Erica Nocerino, and Pierre Drap. 2021. "Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods" Remote Sensing 13, no. 14: 2789. https://doi.org/10.3390/rs13142789
APA StyleChemisky, B., Menna, F., Nocerino, E., & Drap, P. (2021). Underwater Survey for Oil and Gas Industry: A Review of Close Range Optical Methods. Remote Sensing, 13(14), 2789. https://doi.org/10.3390/rs13142789