
Stability Analysis of Electromechanical Coupling Torsional Vibration for Wheel-Side Direct-Driven Transmission System under Transmission Clearance and Motor Excitation


Abstract
1. Introduction
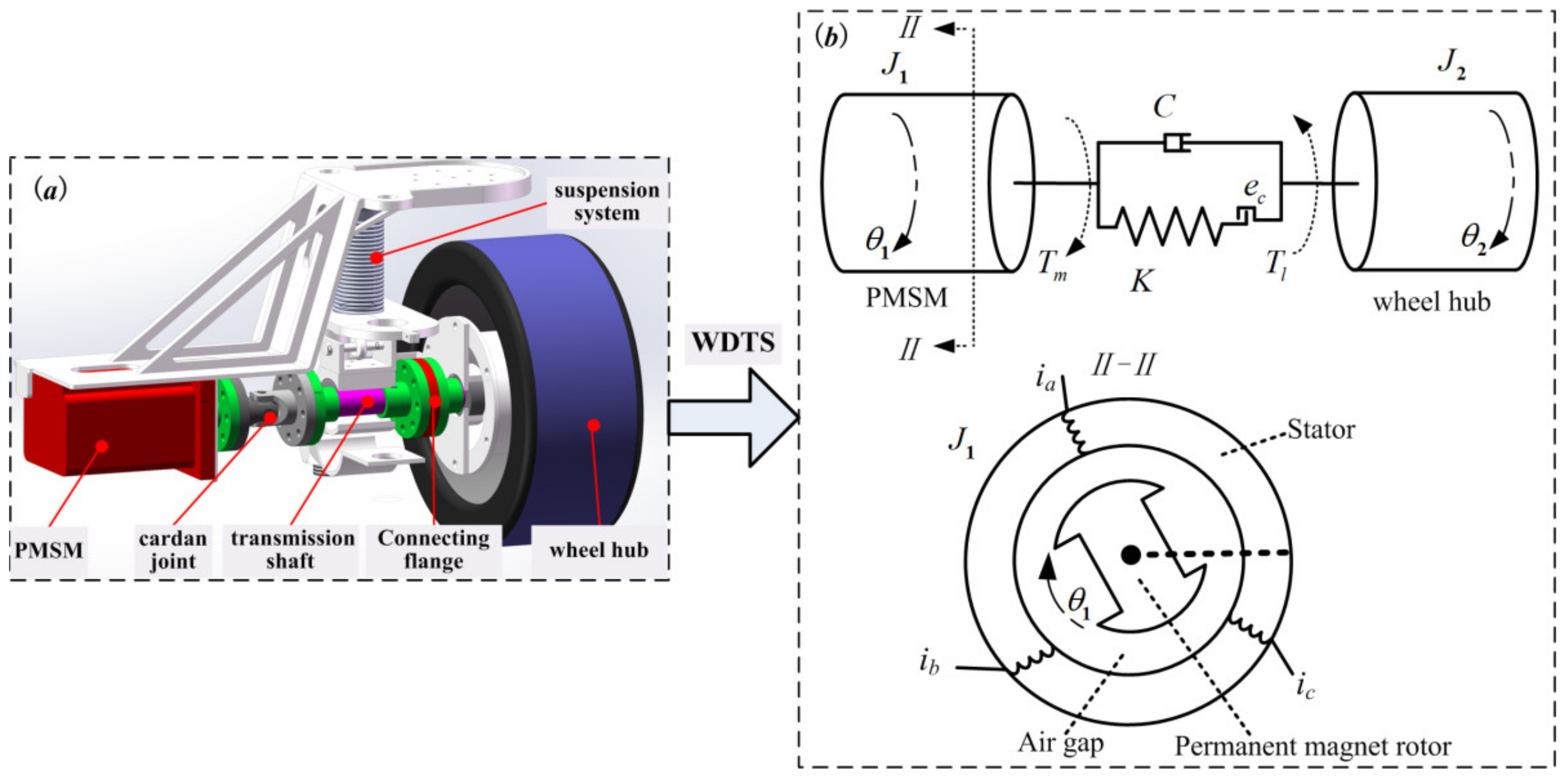
2. System Electromechanical Coupling Dynamics Modelling
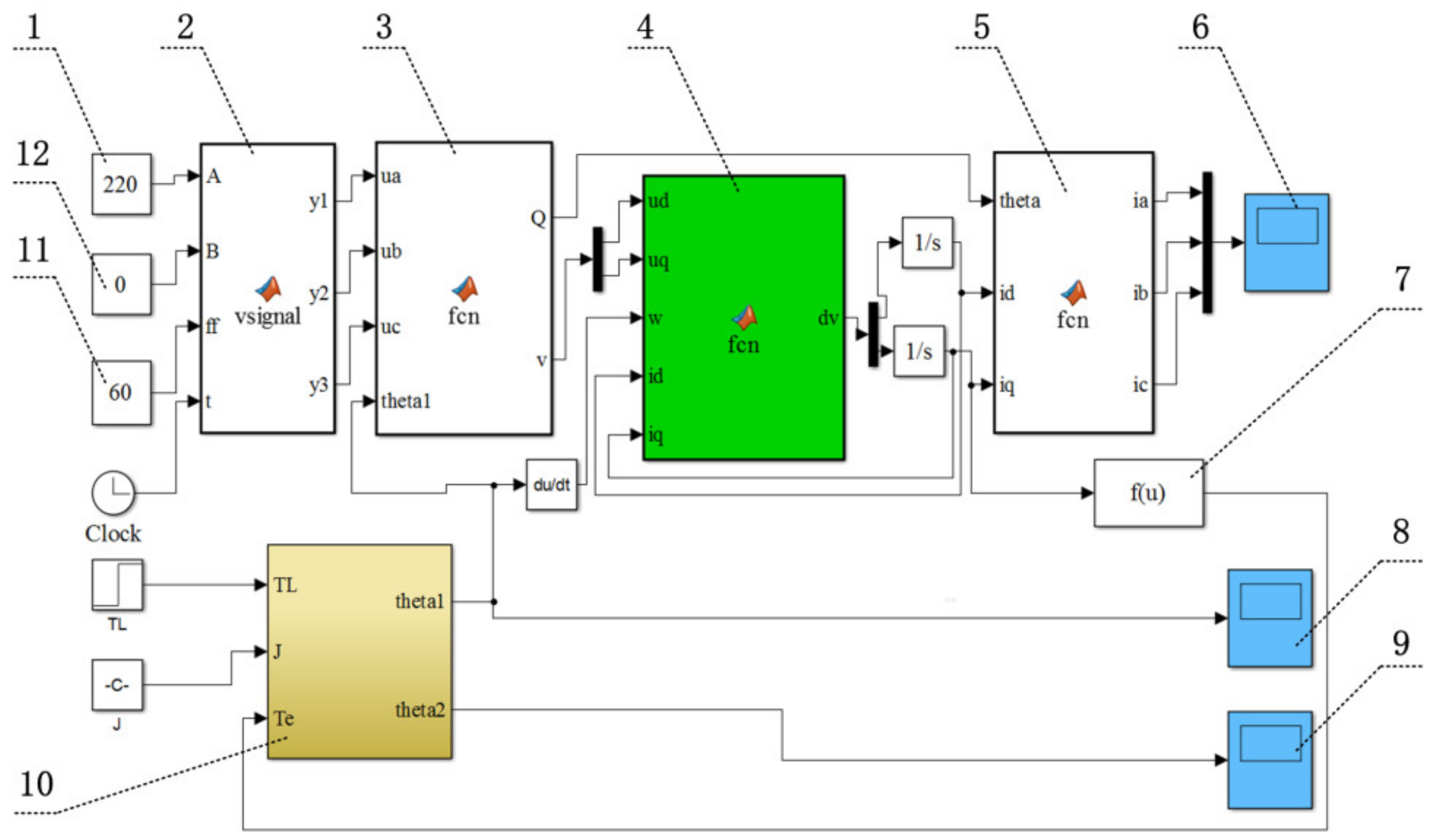
3. System Model Analysis and Verification
4. System Model Solving and Resonance Analysis
5. Conclusions
- (i)
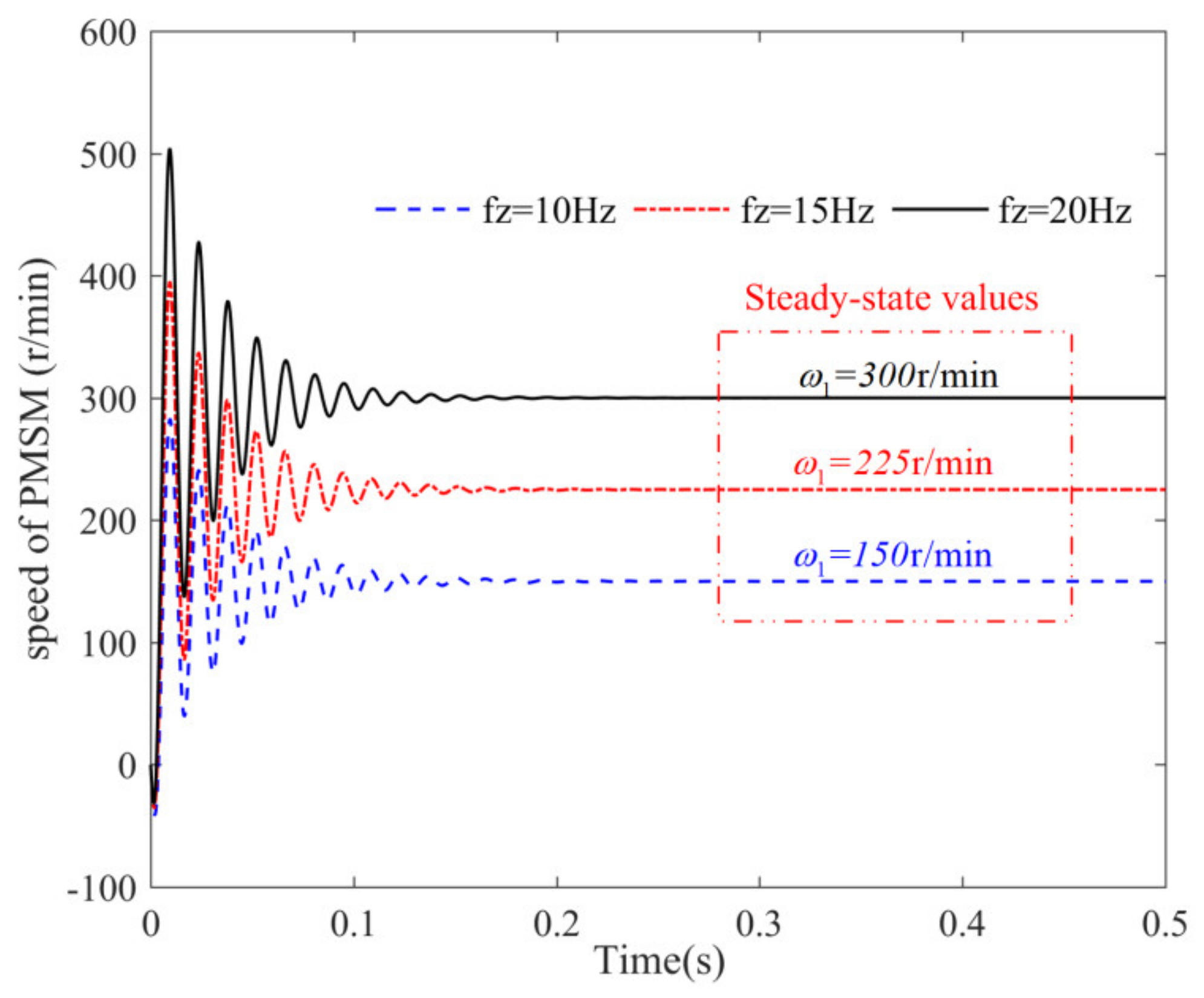
- Under the steady-state operation, with the drive voltage signals of different frequencies applied, the numerical results of the PMSM speed of the constructed WDTS dynamic model are consistent with the theoretical calculation results of the synchronous motor speed. Then, the effectiveness of the constructed model is verified;
- (ii)
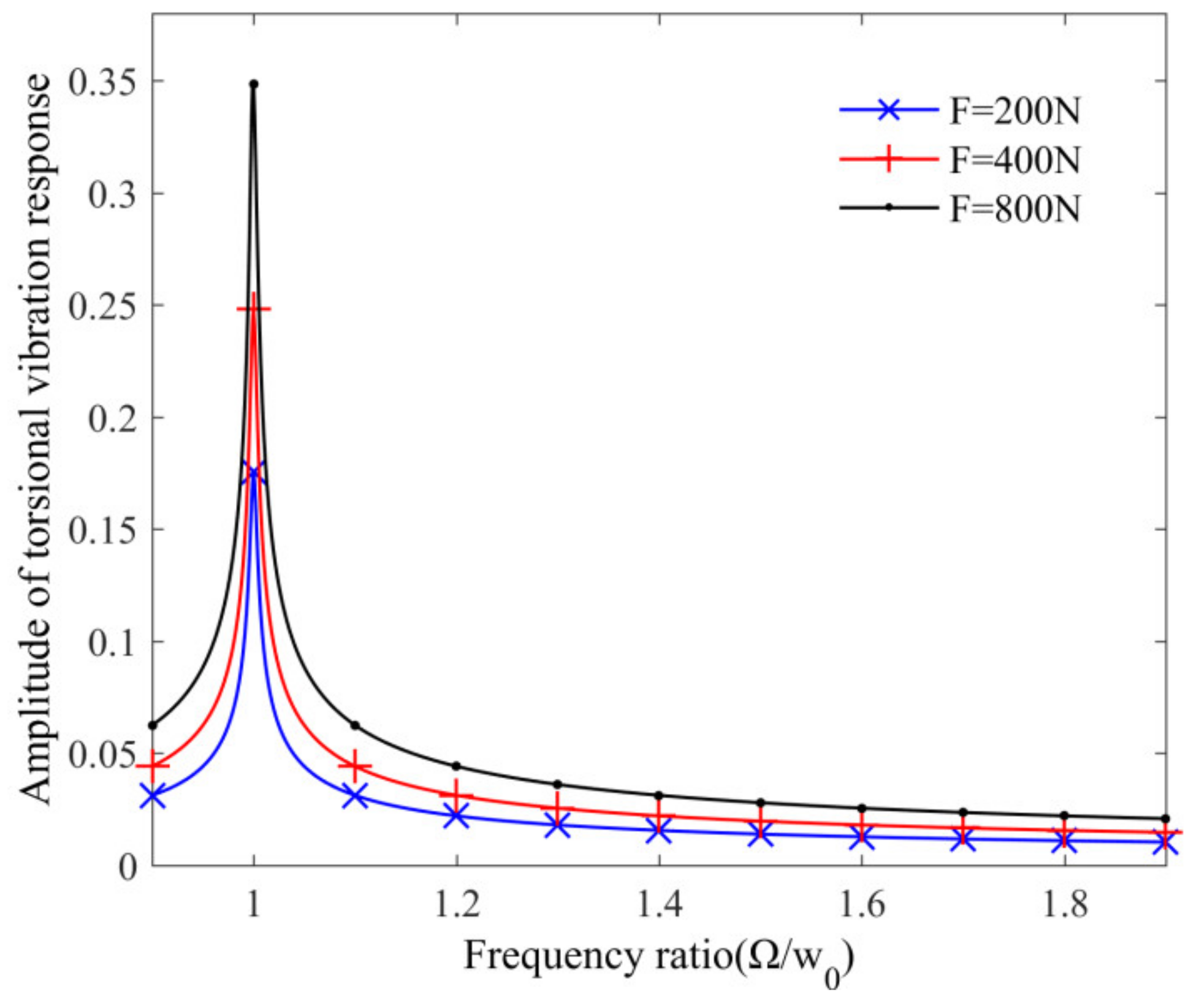
- For the non-stationary transition process in the start-up stage of the PMSM, a cosine function disturbance excitation is used to describe it. From the amplitude frequency characteristic curve of the system torsional vibration response, it is seen that with the increase of the PMSM torque disturbance amplitude, the main resonance response amplitude of the WDTS will increase, but it will not affect the resonance region of the system torsional vibration, and, in actual application, the PMSM torque disturbance amplitude should be suppressed; and
- (iii)
- With the increase of the transmission clearance, the system torsional vibration response shows complex nonlinear characteristics, which is manifested by the jump and bifurcation of the system torsional vibration response amplitudes. This phenomenon will cause fatigue damage to the WDTS, which should be effectively suppressed in the actual application. According to the analysis results of this paper, it can provide an important reference for the efficient utilization of the WDTS in the electric bus.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Meanings |
|---|---|
| J1 | equivalent moment of inertia on the PMSM shaft |
| J2 | moment of inertia of the wheel hub |
| θ1 | rotation angle of the PMSM |
| θ2 | angle of the wheel hub |
| ua | A-phase stator input voltage of the PMSM |
| ub | B-phase stator input voltage of the PMSM |
| uc | C-phase stator input voltage of the PMSM |
| ia | A-phase stator current of the PMSM |
| ib | B-phase stator current of the PMSM |
| ic | C-phase stator current of the PMSM |
| Ra | A-phase stator winding resistance of the PMSM |
| Rb | B-phase stator winding resistance of the PMSM |
| Rc | C-phase stator winding resistance of the PMSM |
| La | self-inductance coefficient of the a-phase stator winding |
| Lb | self-inductance coefficient of the b-phase stator winding |
| Lc | self-inductance coefficient of the c-phase stator winding |
| magnetic potential of the permanent magnet rotor of the PMSM | |
| K | torsional stiffness of the system transmission shaft |
| C | damping coefficient of the system transmission shaft |
| ec | system transmission clearance |
| Tm | electromagnetic torque of the PMSM |
| Tl | load torque of the wheel hub |
| we | electric angular speed of the PMSM |
| uD | stator direct-axis voltage of the PMSM |
| ID | stator direct-axis current of the PMSM |
| uQ | stator quadrature-axis voltage of the PMSM |
| IQ | stator quadrature-axis current of the PMSM |
| fz | stator voltage frequency of the PMSM |
| pole-pair of the PMSM |
References
- Dizqah, A.M.; Lenzo, B.; Sorniotti, A.; Gruber, P.; Fallah, S.; De Smet, J. A Fast and Parametric Torque Distribution Strategy for Four-Wheel-Drive Energy-Efficient Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 4367–4376. [Google Scholar] [CrossRef]
- Jin, X.J.; Yin, G.; Chen, N. Gain-scheduled robust control for lateral stability of four-wheel-independent-drive electric vehicles via linear parameter-varying technique. Mechatronics 2015, 30, 286–296. [Google Scholar] [CrossRef]
- Lin, C.-H. Dynamic control of V-belt continuously variable transmission-driven electric scooter using hybrid modified recurrent legendre neural network control system. Nonlinear Dyn. 2014, 79, 787–808. [Google Scholar] [CrossRef]
- Tran, T.H.; French, S.; Ashman, R.; Kent, E. Impact of compressor failures on gas transmission network capability. Appl. Math. Model. 2018, 55, 741–757. [Google Scholar] [CrossRef]
- Mirsaeidi, S.; Dong, X.; Said, D.M. A fault current limiting approach for commutation failure prevention in LCC-HVDC transmission systems. IEEE Trans. Power Deliv. 2019, 34, 2018–2027. [Google Scholar] [CrossRef]
- Chen, X.; Chen, R.; Deng, T. An investigation on lateral and torsional coupled vibrations of high power density PMSM rotor caused by electromagnetic excitation. Nonlinear Dyn. 2020, 99, 1975–1988. [Google Scholar] [CrossRef]
- Bouguenna, I.F.; Azaiz, A.; Tahour, A.; Larbaoui, A. Robust neuro-fuzzy sliding mode control with extended state observer for an electric drive system. Energy 2019, 169, 1054–1063. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A Flux Constrained Predictive Control for a Six-Phase PMSM Motor with Lower Complexity. IEEE Trans. Ind. Electron. 2019, 66, 5081–5093. [Google Scholar] [CrossRef]
- Jiang, S.; Li, W.; Wang, Y.; Yang, X.; Xu, S. Study on electromechanical coupling torsional resonance characteristics of gear system driven by PMSM: A case on shearer semi-direct drive cutting transmission system. Nonlinear Dyn. 2021, 104, 1205–1225. [Google Scholar] [CrossRef]
- Ye, K.; Ji, J. The effect of the rotor adjustment on the vibration behaviour of the drive-train system for a 5 MW direct-drive wind turbine. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 3027–3044. [Google Scholar] [CrossRef]
- Alizadeh, O.; Yazdani, A. A Control Strategy for Power Regulation in a Direct-Drive WECS with Flexible Drive-Train. IEEE Trans. Sustain. Energy 2014, 5, 1156–1165. [Google Scholar] [CrossRef]
- Mohamed, A. A newly designed instantaneous-torque control of direct-drive PMSM servo actuator with improved torque estimation and control characteristics. IEEE Trans. Ind. Electron. 2007, 54, 2864–2873. [Google Scholar] [CrossRef]
- Yang, X.J.; Liu, H.; Yang, Q.Y.; Zhao, W.H. A novel precision evaluation and analysis method for the direct driven high-speed feed system. Mech. Syst. Signal Process. 2019, 121, 689–710. [Google Scholar] [CrossRef]
- Bouheraoua, M.; Wang, J.B.; Atallah, K. Rotor position estimation of a pseudo direct-drive PM machine using extended Kalman filter. IEEE Trans. Ind. Appl. 2016, 53, 1088–1095. [Google Scholar] [CrossRef]
- Gao, H.; Zhang, Y. Nonlinear behavior analysis of geared rotor bearing system featuring confluence transmission. Nonlinear Dyn. 2014, 76, 2025–2039. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, W.; Cao, R.; Hao, Z.; Jiang, W. Electric Drive System of Dual-Winding Fault-Tolerant Permanent-Magnet Motor for Aerospace Applications. IEEE Trans. Ind. Electron. 2015, 62, 7322–7330. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.F.; Xu, S.Y. Simulation study on speed control of permanent magnet direct-driven system for mining scraper conveyor. Int. J. Eng. Syst. Model. Simul. 2018, 10, 1–11. [Google Scholar] [CrossRef]
- Tang, X.; Yang, W.; Hu, X.; Zhang, D. A novel simplified model for torsional vibration analysis of a series-parallel hybrid electric vehicle. Mech. Syst. Signal Process. 2017, 85, 329–338. [Google Scholar] [CrossRef]
- Han, X.; Palazzolo, A.B. VFD machinery vibration fatigue life and multilevel inverter effect. IEEE Trans. Ind. Appl. 2013, 49, 2562–2575. [Google Scholar] [CrossRef]
- Shen, C.R.; Lu, C.H. A refined torsional-lateral-longitude coupled vehicular driveline model for driveline boom problems. Appl. Math. Model. 2021, 90, 1009–1034. [Google Scholar] [CrossRef]
- Sopanen, J.; Ruuskanen, V.; Nerg, J.; Pyrhonen, J. Dynamic torque analysis of a wind turbine drive train including a direct-driven permanent-magnet generator. IEEE Trans. Ind. Electron. 2011, 58, 3859–3867. [Google Scholar] [CrossRef]
- Zhang, X.J.; He, W.; Hu, J.B. Impact of inertia control of DFIG-based WT on torsional vibration in drivetrain. IEEE Trans. Sustain. Energy 2020, 11, 2525–2534. [Google Scholar] [CrossRef]
- Chen, X.; Peng, D.; Hu, J.B.; Li, C.; Zheng, S.L. Adaptive torsional vibration active control for hybrid electric powertrains during start-up based on model prediction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 09544070211056176. [Google Scholar] [CrossRef]
- Sheng, L.C.; Li, W.; Jiang, S.; Chen, J.J.; Liu, A. Nonlinear torsional vibration analysis of motor rotor system in shearer semi-direct drive cutting unit under electromagnetic and load excitation. Nonlinear Dyn. 2019, 96, 1677–1691. [Google Scholar] [CrossRef]
- Lozynskyy, A.; Chaban, A.; Perzyński, T.; Szafraniec, A.; Kasha, L. Application of fractional-order calculus to improve the mathematical model of a two-mass system with a long shaft. Energies 2021, 14, 1854. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.J.; Liu, J.J.; Li, Y.Q. Nonlinear parametrically excited vibration and active control of gear pair system with time-varying characteristic. Chin. Phys. B 2015, 24, 104501. [Google Scholar] [CrossRef]
- Ju, J.J.; Li, W.; Wang, Y.Q.; Fan, M.B.; Yang, X.F. Dynamics and nonlinear feedback control for torsional vibration bifurcation in main transmission system of scraper conveyor direct-driven by high-power PMSM. Nonlinear Dyn. 2018, 93, 307–321. [Google Scholar] [CrossRef]
- Liu, S.; Ai, H.; Sun, B.; Li, S.; Meng, Z. Bifurcation and chaos of electromechanical coupling main drive system with strongly nonlinear characteristic in mill. Chaos Solitons Fractals 2017, 98, 101–108. [Google Scholar] [CrossRef]
- Ju, J.J.; Li, W.; Yang, X.F.; Wang, Y.Q.; Liu, Y.F. Electromechanical coupling vibration characteristics of an AC servomo-tor-driven translational flexible manipulator. Int. J. Adv. Robot. Syst. 2016, 13, 1–10. [Google Scholar] [CrossRef]
- Liu, Y.F.; Li, W.; Yang, X.F.; Fan, M.B.; Wang, Y.Q. Vibration response and power flow characteristics of a flexible manipulator with a moving base. Shock. Vib. 2015, 2015, 589507. [Google Scholar] [CrossRef]
- Si, J.; Zhao, S.Z.; Feng, H.C.; Hu, Y.H.; Cao, W.P. Analysis of temperature field for a surface-mounted and interior permanent magnet synchronous motor adopting magnetic-thermal coupling method. CES Trans. Electr. Mach. Syst. 2018, 2, 166–174. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Wang, Z.H.; Lu, Q.F.; Ye, Y.Y.; Lu, K.Y.; Fang, Y.T. Investigation of PMSM Back-EMF using sensorless control with parameter variations and measurement errors. Przeglad Elektrotechniczny 2012, 88, 182–186. [Google Scholar]
- Abdulle, A.; Grote, M.J.; Stohrer, C. Finite element heterogeneous multiscale method for the wave equation: Long-time effects. Multiscale Modeling Simul. 2014, 12, 1230–1257. [Google Scholar] [CrossRef][Green Version]
- Budarapu, P.R.; Gracie, R.; Bordas, S.P.A.; Rabczuk, T. An adaptive multiscale method for quasi-static crack growth. Comput. Mech. 2014, 53, 1129–1148. [Google Scholar] [CrossRef]
- Naik, R.D.; Mhalsekar, S.D. Bound on amplitude of a MEMS resonator by approximating the derivative of the lyapunov function in finite time. Int. J. Struct. Stab. Dyn. 2021, 21, 2171003. [Google Scholar] [CrossRef]






| Generalized Coordinates | Electromagnetic Subsystem | Mechanical Subsystem | |||
|---|---|---|---|---|---|
| Stator of the PMSM | Output Angles of the PMSM | Output Angles of the Wheel Hub | |||
| j = 1 | j = 2 | j = 3 | j = 4 | j = 5 | |
| qj | e1 | e2 | e3 | ||
| ia | ib | ic | |||
| ua | ub | uc | Tm | Tl | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, J.; Liu, Y.; Zhang, C. Stability Analysis of Electromechanical Coupling Torsional Vibration for Wheel-Side Direct-Driven Transmission System under Transmission Clearance and Motor Excitation. World Electr. Veh. J. 2022, 13, 46. https://doi.org/10.3390/wevj13030046
Ju J, Liu Y, Zhang C. Stability Analysis of Electromechanical Coupling Torsional Vibration for Wheel-Side Direct-Driven Transmission System under Transmission Clearance and Motor Excitation. World Electric Vehicle Journal. 2022; 13(3):46. https://doi.org/10.3390/wevj13030046
Chicago/Turabian StyleJu, Jinyong, Yufei Liu, and Chunrui Zhang. 2022. "Stability Analysis of Electromechanical Coupling Torsional Vibration for Wheel-Side Direct-Driven Transmission System under Transmission Clearance and Motor Excitation" World Electric Vehicle Journal 13, no. 3: 46. https://doi.org/10.3390/wevj13030046
APA StyleJu, J., Liu, Y., & Zhang, C. (2022). Stability Analysis of Electromechanical Coupling Torsional Vibration for Wheel-Side Direct-Driven Transmission System under Transmission Clearance and Motor Excitation. World Electric Vehicle Journal, 13(3), 46. https://doi.org/10.3390/wevj13030046