Abstract
Among various tools implemented to counteract undesired effects of time-varying uncertainties, disturbance observer (DOB)-based controller has gained wide popularity as a result of its flexibility and efficacy. In this paper, a low-order DOB that is capable of compensating for the effects of a biased harmonic disturbance, as well as plant uncertainties is presented. The proposed low-order DOB can asymptotically estimate a harmonic disturbance of known frequency but unknown amplitude and phase, by using measurable output variables. An analysis carried out by using the singular perturbation theory shows that the nominal performance of the system can be recovered from a real uncertain system when the observer gain is sufficiently large. The observer gains that result in the performance recovery of the real uncertain system are obtained from the stability condition of the boundary-layer system. To test the performance of the proposed observer, computer simulations with a numerical example and laboratory experiments using a DC motor system have been carried out. The experimental results show that the proposed low-order DOB-based control scheme can provide enhanced performance.
1. Introduction
Throughout all industrial systems, regardless of all measures taken to design an effective controller that can achieve nominal performance, unforeseeable factors, such as unmodeled plant dynamics, system parameter variations, and external time-varying disturbances inevitably give rise to system performance deterioration. As a result, the robustness of a control system has become a crucial quality and various methods have been proposed to guarantee the robustness of control systems [1,2]. Among these methods, disturbance observers (DOBs) have been widely studied [3]. By using this method, any previously designed controller, which can achieve the desired performance under nominal conditions, can be modified into a robust controller simply by adding a DOB. Thus, enabling the recovery of nominal control performance of any exiting controller through disturbance compensation. For more details on DOB, see [4] and references therein.
1.1. Literature Review
DOB studies can be classified into two categories. One of them uses the inverse system of the controlled plant and does not assume the disturbance model [5,6,7,8,9,10,11]. Since a low pass filter such as Q-filter is important to implement the inversion-based DOB, the robust performance of the DOB with regard to the filter’s order was studied in [5]. For second-order systems, systematic design guidelines for Q-filter were suggested in [6]. The authors of [7] proposed a nonlinear DOB with a rigorous theoretical analysis for guaranteeing robust performance recovery of the controlled system. Extension of the inversion-based DOB application to non-minimum phase systems was tried in [8] by using a parallel compensation filter. A high gain DOB was applied to a load frequency control of power systems with multiple areas [9]. DOBs were also designed for the current control of a PMSM (Permanent Magnet Synchronous Motor) [10] and the dynamic load emulation of a programmable dynamometer [11].
Another DOB approach considers the disturbance to be a trigonometric function or a polynomial one [12,13,14,15,16,17,18,19,20,21,22]. By using integral of estimation error, the proportional integral observer (PIO) has a more robust structure against disturbances and system uncertainties than the Luenberger observer [12]. In [13], a nonlinear PIO was designed, and the estimation performance was proved by Lyapunov analysis. Slowly varying disturbances or uncertainties can be modeled to constant values and estimated in the PIO as augmented states. The approach has been applied to a DC motor system equipped with an adaptive robust controller to achieve high performance motion control [14], an electric power converter in a cascade manner [15], a time-delayed system combined with a communication DOB [16], and a manipulator controlled by a sliding mode controller for adjusting the switching gain [17]. By using multiple integrators, a robust state observer was proposed in the presence of uncertainties and measurement noise [18]. The authors of [19] adopted the polynomial disturbance model to deal with a sinusoidal disturbance. In [20], a sinusoidal disturbance model was used to attenuate the effect of torque ripple. A linear matrix inequality condition was established in [21] for the stability and performance of the observer using a trigonometric disturbance model. The harmonic disturbance model was used for the Q-filter design to asymptotically estimate the disturbance [22].
The approach in the first category copes with the disturbance effect by suppressing it rather than asymptotically canceling it out. Therefore the disturbance rejection is based on an approximation. On the other hand, the latter approach puts an internal model of disturbance into the structure of the observer. Among the various DOB studies that implement this approach, those concerned with compensating for the effects of harmonic disturbances have dealt with rapidly changing periodic disturbances such as torque ripple in electric motor control [3,13,19,20,21,22]. In addition, this approach allows the estimation of both the disturbance and the system internal states using the output information.
However, the use of a high-order estimator increases the order of the entire control system. This can make the analysis complicated and increase the amount of numerical computation. To circumvent this problem, low-order observer-based controller design methods have been studied [23,24,25,26,27,28,29]. The order of a reduced-order linear functional observer in [23] depends on the ratio of the number of independent output measurements to the number of independent inputs. Based on the state function estimation, the estimation problem of the state and the unknown inputs was solved by using only the known input and the output information [24]. A reduced-order observer was designed for a nonlinear system under the condition that the unmeasured state variables are differentially stable [25]. In [26], a reduced-order DOB using Q-filter was proposed for nonlinear uncertain systems. It was shown that the reduced-order DOB has the same robust performance with a previous full-order DOB. By using the system output information rather than the full state, a low-order constant DOB was presented in [27,28] without an experimental validation. However, assuming a constant disturbance may degrade the estimation performance of the DOB when the disturbance is time-varying, such as a harmonic disturbance. The authors of [29] have presented a low-order disturbance observer to estimate a harmonic disturbance using only output measurement without robustness analysis and experimental validation.
1.2. Proposed Method
This paper designs a low-order DOB to deal with a biased harmonic disturbance based on measurable output information. The frequency of the disturbance is assumed to be known [3,13,20,21,22]. Inspired by [27], a new DOB structure is first presented based on full state information. Based on the structure, a new low-order DOB is proposed by using the output information rather than the full state. The proposed DOB can be implemented with a low dynamic order according to a rank factorization result of a matrix related to the unmeasurable system states. For the stability of the proposed DOB, a sufficient condition is presented.
A theoretical analysis is also performed on the augmented system to illustrate the performance recovery property of the proposed observer against parameter uncertainties. The main idea used in this study is the singular perturbation theory [2], which is motivated by the fast observer dynamics. A stability condition for the fast boundary-layer system is found out to design observer gains such that the real uncertain system recovers to the nominal plant without uncertainties. The stability condition can be satisfied by adjusting the observer parameters, while it depends on a real system parameter. Under the condition, it is shown that the quasi-steady-state system can closely approximate the nominal plant as the observer poles are placed sufficiently left of the s-plane.
In order to explain the proposed design procedure, a numerical simulation test is first carried out by using the existing example in [24,27]. Comparative computer simulations and practical experiments have also been performed for a DC motor system. The system is under various parameter uncertainties, as well as a biased harmonic disturbance. The proposed low-order observer can estimate the system state as well as the equivalent disturbance to achieve the control goal. The experimental results show that the proposed disturbance observer can be effectively applied to cope with parameter uncertainties and the disturbance.
The main difference from [29] is that this paper includes the theoretical analysis of the performance recovery property of the proposed observer. A more compact form of the rank factorization matrix is also presented. In addition, not only the theoretical analysis but also comparative experiments are performed in the paper. The contribution of this work can be summarized as follows.
- A new low-order DOB is presented to asymptotically estimate a biased harmonic disturbance and to compensate for the effects of plant uncertainties based on the output measurement rather than the full state information.
- Theoretical analysis is carried out to show the performance recovery property from a real uncertain system to the nominal one without accounting for the uncertainties when the observer gain is sufficiently large under a stability condition.
- Comparative computer simulations and practical experiments are carried out to validate the theoretical analysis and the performance of the proposed approach by using a DC motor system against parametric uncertainties and a biased sinusoidal disturbance.
This paper is organized as follows. Section 2.1 introduces the system and the disturbance models. When all state variables are measurable, a model-based DOB is designed in Section 2.2. A low-order DOB using output information is presented in Section 2.3. Section 4.1 considers a numerical example to explain the proposed observer. The theoretical analysis on the performance recovery property is presented in Section 3. A robust position control problem of a DC motor system is considered in Section 4.2. Section 5 concludes the paper.
Notations:
Moore–Penrose pseudoinverse of a matrix F is denoted by . and are the () identity matrix and the zero matrix, respectively. is the nominal value of a system parameter A, while denotes the estimate of a state variable x of a dynamic system.
2. DOB for a Biased Harmonic Disturbance
2.1. System and Disturbance Models
This paper considers an output measurement-based low-order DOB design problem of a system described by
where , , , and are the states, the input, the disturbance, and the output, respectively.
Instead of a constant disturbance [27] or a sinusoidal function [13] that are mainly dealt with in the low-order DOB studies, the paper considers a harmonic disturbance with a constant offset as given by
where all the parameters except for the frequency have unknown values. The disturbance can be also represented by
where , , , and the initial condition is unknown.
Instead of constructing a conventional extended observer accounting for the full model of the disturbance, this paper presents a new low-order DOB to asymptotically estimate the disturbance.
Remark 1.
A number of works have been performed to estimate harmonic disturbances having known frequencies [3,13,20,21,22]. In order to cope with disturbances with unknown frequencies, further researches should be devoted to combining them with frequency estimation algorithms as in [30,31].
Before designing a new low-order DOB using output information, the next section presents a DOB using full state information. Based on the structure, the output-based DOB is designed in the following section.
2.2. DOB Using Full State Information
The Laplace transformation of Equation (2) is given by
This paper aims to make the transfer function from the disturbance (d) to the estimate () have the following form:
where and the coefficients () are design parameters such that the denominator is Hurwitz.
When the disturbance estimation error , the transfer function to the error is given by
By substituting Equation (4) into Equation (6), it can be seen that the estimation error asymptotically converges to zero and the convergence rate depends on and ().
To implement Equation (7) without d, we replace it with known variables from Equation (1a) by using Moore–Penrose pseudoinverse matrix as follows:
where and the pseudoinverse is a row vector satisfying .
To be implemented the DOB, Equation (10) needs all the state information of the system. Since the states are not always measurable in many cases, the next section presents a low-order DOB based on output measurements by using a rank factorization scheme as in [27].
2.3. DOB Using Output Information
The state variables in Equation (10) can be divided into measurable and unmeasurable parts [27].
where is the pseudoinverse of C, is the identity matrix, and .
A rank factorization of the unmeasurable part of Equation (12) can be described by
where the new variable and when . Since does not include , it has a more compact form than the matrix in [29].
When the rank w is less than , a low-order DOB can be constructed by estimating the state . By the definition of , Equation (12) is represented by
The final form of the DOB is obtained by constructing an additional estimator for as follows:
where z is an additional state for constructing the estimate . The matrices Q, R, and S are the parameters to be designed such that estimates the unmeasurable state .
When , the error dynamics are given by
The matrices Q, R, and S are chosen such that the following conditions are satisfied [27]:
From Equation (17), it can be obtained that
Since Equation (18) does not depend on the dynamics of x and in Equation (15), the proposed observer can successfully estimate the disturbance when R is chosen to be Hurwitz.
Remark 2.
Since in Equation (17a), a necessary and sufficient condition for the existence of the matrices is given by
Instead of Equation (17b), a static output feedback algorithm can be adopted to find the matrices stabilizing the error dynamics under Condition (19) as in [28].
The result of this section can be summarized in the next proposition.
Proposition 1.
If the rank of V from the rank factorization in Equation (13) is less than the number , i.e., , the output measurement-based DOB in Equation (15) is a low-order observer having less dimension than the conventional reduced-order observer. Under Equation (17) with a stable R, the proposed DOB in Equation (15) can asymptotically estimate the disturbance in Equation (2).
As an application of the proposed DOB, it can be incorporated with an existing controller to maintain the pre-designed nominal performance of a controlled system in the presence of the external disturbance. The next section investigates the nominal performance recovery property of the feedforward compensation using the proposed DOB against additional parameter uncertainties via the singular perturbation analysis [2].
3. Performance Recovery via Disturbance Compensation and Singular Perturbation Analysis
3.1. System Model
For the performance recovery analysis, we consider a single input system that has a canonical form given by
where uncertain parameters lie in the last rows and their nominal values are utilized for the observer design.
Assumption 1.
The parameter b in Equation (20) is supposed to be in a known bound, and its sign is positive without loss of generality, i.e., and its nominal value .
To deal with parametric uncertainties, an equivalent disturbance is defined as follows:
where and are the nominal values; and .
Suppose that a pre-designed control input achieves a desired control performance for the following nominal system:
The next subsection shows that a feedforward compensation for Equation (21) () using the proposed disturbance estimation () can approximately recover the nominal performance of Equation (22) via singular perturbation theory. An additional stability condition of the boundary-layer system is found out for selecting observer gains that result in the performance recovery.
3.2. Robustness Analysis
The proposed DOB for Equation (21) is given by
When , the composite system can be given by
where . The observer parameter R is selected to be where is the identity matrix. The control has been designed for the nominal control system performance.
By the coordinate transformation and , the singular perturbation form is obtained.
where and .
According to the singular perturbation analysis, the variables , and d in Equation (26) are regarded as slow variables, whereas the state and as fast variables. The system matrix of the fast dynamics is , and it can be seen that its stability depends on the eigenvalues of . The characteristic polynomial of is given by
Under Assumption 1, and from Equation (7). Hence, Equation (27) is stable when
by the Routh–Hurwitz stability criterion. The coefficients can be chosen such that Equation (28) is satisfied with a small .
Under Condition (28), the quasi-steady-state solution of the boundary-layer system of Equations (26b) and (26c) is
This implies
and . It is noted that , , and B have their non-zero elements only in their last rows, respectively. Since
it can be seen that
Therefore, in the quasi-steady-state, Equation (26a) becomes
This enables us to design the control in Equation (21) with the nominal parameters and under parameter uncertainties as well as the harmonic disturbance. This means that the robust performance can be achieved by using the proposed low-order DOB against the mixed uncertainties. The next proposition summarizes the result of this section.
Proposition 2.
Under Assumption 1, the positive coefficients τ and () in Equation (7) can be chosen such that Equation (28) is satisfied. Then, in the presence of parametric uncertainties and the harmonic disturbance of Equation (2), the augmented system of Equation (25) behaves like the nominal system of Equation (33) when Equation (17) holds with and .
In the next section, a numerical example and a practical DC motor application illustrate the design procedure and the performance of the proposed DOB.
4. Illustrative Examples
4.1. A Numerical Example
This section explains the design procedure of the proposed low-order DOB by using the example in [24,27] where a constant disturbance is considered. The system parameters are the same as the previous ones except for the disturbance matrix F.
Consider System (1) with
and . Hence, the dimensions , and .
From the rank factorization in Equation (13), it can be obtained that and with . Since Condition (17) is satisfied with the matrices , , and , the proposed low-order DOB of Equation (15) can be designed by Proposition 1.
Figure 1 shows that the proposed DOB (Prop.) can asymptotically estimate the disturbance in the simulation. The observer parameters , , , and for and . The estimation performance has been improved by using the proposed observer (Prop.), compared to the previous one (Const.) assuming a constant disturbance.
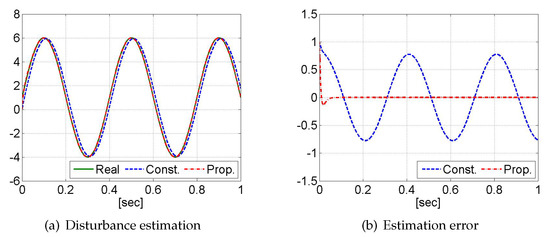
Figure 1.
Simulation results of a numerical example.
Remark 3.
In order for a conventional full-order observer and a reduced-order one to asymptotically estimate the disturbance under the observability assumption, the additional system order should be eight and six, respectively, while the proposed observer in Equation (15) has the order four in this example. This means that the proposed observer can be implemented by using a lower order dynamic equation than that of a conventional extended observer. It should also be mentioned that, since System (34) is not observable, the conventional extended observers using the disturbance Model (3) cannot be constructed to compare with the proposed observer.
4.2. Application to DC Motor Position Control
For experimental validation of the proposed DOB, this section deals with a robust position control problem of a DC motor system, as shown in Figure 2.
where and are the rotor angle and its velocity, respectively; and denote the friction coefficient and the rotor inertia, respectively; is the armature current, and is the torque constant. and denote the armature resistance and inductance, respectively; is the back electromotive force (EMF) constant. The control input u is the voltage input, and d is the disturbance. The measurable output y is composed of the angle () and the current (). Since all industrial processes are subject to parameter variations, it is supposed that all the real parameters are uncertain, as shown in Table 1. The uncertain real parameters are specified for the simulations.
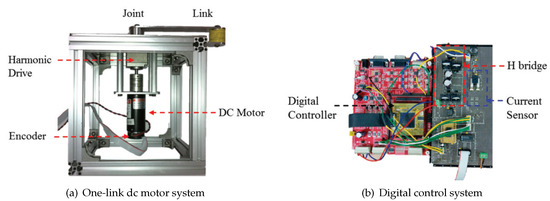
Figure 2.
DC motor control system for experimental tests.

Table 1.
System parameters.
Remark 4.
Since two states of Equation (35) are measurable, the conventional reduced-order observer can estimate the disturbance using the same dynamic order with the proposed one in Equation (15) in this example. The contribution of the section is to illustrate the design procedure and validate the proposed low-order disturbance observer through practical experiments using a DC motor system.
Following the analysis in Section 3, Equation (35) is rewritten as the canonical form of Equation (20).
where , , , and .
4.2.1. The Nominal Control
In Section 3, the proposed DOB has been incorporated with to maintain its nominal performance of Equation (22) in the absence of the uncertainties. In this section, an observer-based integral state feedback law is employed as the nominal control to make the position follow the reference .
where and with the nominal parameters. When and , the closed-loop transfer function from to is given by
where . In the test results of the following section, the control gain k in Equation (37) has been determined such that the characteristic polynomial .
Figure 3 exhibits the control block diagram of this section incorporating the nominal control of Equation (37) with the proposed DOB.
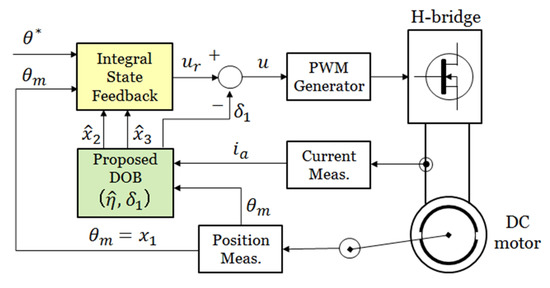
Figure 3.
Control block of DC motor control system.
4.2.2. Design of the Proposed DOB
When the design parameters and , Condition (17b) is satisfied with because
From Equation (17a), it can be obtained that
Hence, Condition (17) is satisfied with , and .
Since Condition (17) is satisfied, the proposed DOB in Equation (15) can be designed by Proposition 1. The parameter R in Equation (18) can be any negative number. in the experiments of the next section.
4.2.3. Experimental Results
This section discusses computer simulations and practical experiments in the presence of parametric uncertainties as well as the biased harmonic disturbance. The uncertain real parameters are specified in Table 1. The disturbance is enforced at s.
The test results are presented in Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8. The three different observer-based control schemes in Table 2 have been compared in the results:
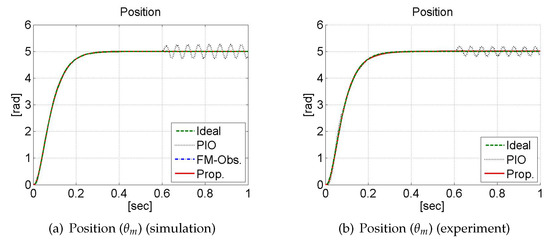
Figure 4.
Results of DC motor position.
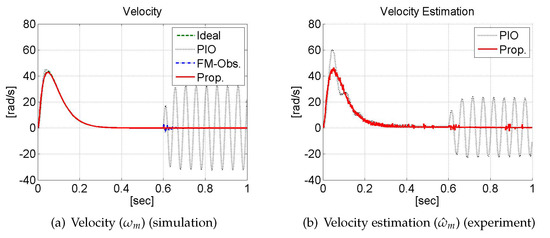
Figure 5.
Results of DC motor velocity.
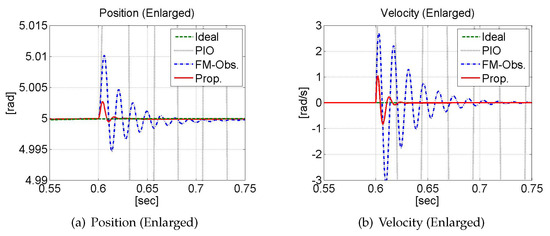
Figure 6.
Results of DC motor position (enlarged).
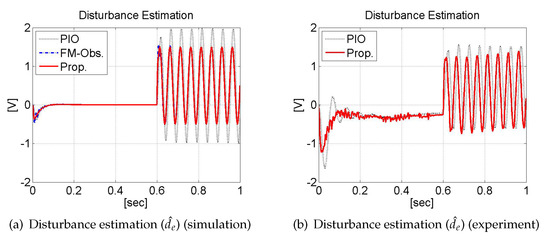
Figure 7.
Results of disturbance estimation.
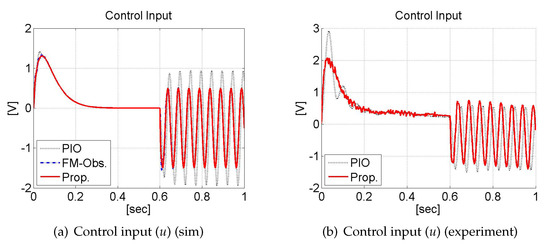
Figure 8.
Results of control input.
Table 2.
Comparative controllers.
- (i)
- (PIO): The first controller used the proportional-integral observer (PIO) [12] for and the disturbance estimation, assuming that the disturbance is an unknown constant. In this case, the observer dynamic order is four. The controller is given by where
- (ii)
- (iii)
- (Prop.): For the proposed controller (Prop.) , the observer parameters , , , and for and . Since (), the observer dynamic order is four. The proposed observer can estimate both the velocity and the disturbance at the same time. The velocity estimation for the proposed controller is achieved by
Since the observers are expected to be significantly faster than the controller, the locations of the observer poles are chosen further away leftward from the controller poles of Equation (38). The observer gains of i), ii), and iii) are obtained by placing all the observer poles equally at .
Figure 4 and Figure 5 compare the simulation and the experimental results of the motor angle position and the velocity (estimation), respectively. In Figure 4, all the controllers could achieve the control objective before the external disturbance was enforced at s. The enlarged view of simulation results at about 0.6 s are shown in Figure 6. The results show that (ii) (FM-Obs.) and (iii) (Prop.) can successfully estimate the velocity and compensate for the unknown lumped disturbance to maintain the nominal performance. It is also noted that the proposed method (Prop.) can be implemented by using a lower order dynamic equation than the conventional method (FM-obs.) without losing the robust performance. Since the two control performances were only a little different in Figure 6, the results of (ii) were excluded in the experimental results.
Figure 7 and Figure 8 show the estimated disturbances and the control inputs, respectively. It can be seen that the experimental values in the figures are different from those of the simulation results. The differences suggest the existence of additional uncertainties in the experimental system set. This implies that the proposed approach can cope with additional practical disturbances.
It may be possible to enhance the performance of PIO by increasing the observer gain. However, the high-gain approach using a constant disturbance observer often causes undesirable noise and vibrations.
For the laboratory experiments, all the control algorithms were discretized by using the trapezoidal method and implemented into a TI DSP TMS320F28335. The digital algorithms are updated every 25 s, which is also the sampling period of A/D conversion for the current. The PWM frequency is 20 kHz.
5. Conclusions
Based on a rank factorization scheme, a low-order DOB has been presented to asymptotically estimate a biased harmonic disturbance using the output measurement information. An explicit analysis of the robust performance recovery of the feedforward compensation using the proposed DOB has been performed against additional parameter uncertainties. From the singular perturbation analysis, a stability condition on the boundary-layer system is found out for the performance recovery. Hence, the proposed DOB can be implemented to maintain nominal performance against parameter uncertainties and the biased harmonic disturbance by using a lower order dynamic system than conventional extended observers without losing the robustness guaranteed by previous full-order DOBs.
To test the performance of the proposed observer, computer simulations with a numerical example and laboratory experiments using a DC motor system have been performed. The proposed low-order observer has successfully estimated a biased harmonic disturbance contained in an unobservable system to which the conventional extended observer cannot be simply applied. Through comparative simulations and experiments, it has been shown that the proposed observer can recover the control performance of a DC motor position control system by estimating the velocity as well as the lumped disturbance. The proposed scheme can be extended to estimate disturbances with multiple frequencies combined with any polynomial functions. Future works include the estimation of disturbances having unknown frequencies.
Author Contributions
Conceptualization, I.H.K. and Y.I.S.; simulation works, experiments, and writing—original draft preparation, I.H.K.; theoretical analysis and writing—review and editing, I.H.K. and Y.I.S.; supervision, Y.I.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by Korea Electric Power Corporation. (Grant number: R17XA05-2) This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. 2019R1F1A1058543).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| DOB | Disturbance Observer |
| EMF | Electromotive Force |
| PIO | Proportional-Integral Observer |
| FM-Obs. | Full Model-Observer |
| PWM | Pulse Width Modulation |
References
- Krstić, M.; Kanellakopoulos, I.; Kokotović, P.V. Nonlinear and Adaptive Control Design; John Wiley & Sons, Inc.: New York, NY, USA, 1995. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Li, S.; Yang, J.; Chen, W.H.; Chen, X. Disturbance Observer-Based Control: Methods and Applications; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Sariyildiz, E.; Oboe, R.; Ohnishi, K. Disturbance observer-based robust control and its applications: 35th anniversary overview. IEEE Trans. Ind. Electron. 2020, 3, 2042–2053. [Google Scholar] [CrossRef]
- Umeno, T.; Hori, Y. Robust speed control of dc servomotors using modern two degrees-of-freedom controller design. IEEE Trans. Ind. Electron. 1991, 5, 363–368. [Google Scholar] [CrossRef]
- Choi, Y.; Yang, K.; Chung, W.K.; Kim, H.R.; Suh, I.H. On the robustness and performance of disturbance observers for second-order systems. IEEE Trans. Autom. Control 2003, 2, 315–320. [Google Scholar] [CrossRef]
- Back, J.; Shim, H. Adding robustness to nominal output feedback controllers for uncertain nonlinear systems: A nonlinear version of disturbance observer. Automatica 2008, 10, 2528–2537. [Google Scholar] [CrossRef]
- Jo, N.H.; Shim, H.; Son, Y.I. Disturbance observer for non-minimum phase linear systems. Int. J. Control Autom. Syst. 2010, 5, 994–1002. [Google Scholar] [CrossRef]
- Fitri, I.R.; Kim, J.S.; Song, H. High-gain disturbance observer-based robust load frequency control of power systems with multiple areas. Energies 2017, 5, 595. [Google Scholar] [CrossRef]
- Kim, Y.; Seo, H.T.; Kim, S.K.; Kim, K.S. A robust current controller for uncertain permanent magnet synchronous motors with a performance recovery property for electric power steering applications. Energies 2018, 5, 1224. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.; Back, J.; Lee, Y.I. A robust emulation of mechanical loads using a disturbance-observer. Energies 2019, 12, 2236. [Google Scholar] [CrossRef]
- Söffker, D.; Yu, T.J.; Müller, P.C. State estimation of dynamical systems with nonlinearities by using proportional-integral observer. Int. J. Syst. Sci. 1995, 9, 1571–1582. [Google Scholar] [CrossRef]
- Chen, W.H. Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 2004, 4, 706–710. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Adaptive robust control of DC motors with extended state observer. IEEE Trans. Ind. Electron. 2014, 7, 3630–3636. [Google Scholar] [CrossRef]
- Kim, I.H.; Son, Y.I. Regulation of a DC/DC boost converter under parametric uncertainty and input voltage variation using nested reduced-order PI observers. IEEE Trans. Ind. Electron. 2017, 1, 552–562. [Google Scholar] [CrossRef]
- Yook, J.H.; Kim, I.H.; Han, M.S.; Son, Y.I. Robustness improvement of DC motor speed control using communication disturbance observer under uncertain time delay. Electron. Lett. 2017, 6, 389–391. [Google Scholar] [CrossRef]
- Chen, K.Y. Robust optimal adaptive sliding mode control with the disturbance observer for a manipulator robot system. Int. J. Control Autom. Syst. 2018, 4, 1701–1715. [Google Scholar] [CrossRef]
- Son, Y.I.; Kim, I.H. A robust state observer using multiple integrators for multivariable LTI systems. IEICE Trans. Fundam. 2010, 5, 981–984. [Google Scholar] [CrossRef]
- Godbole, A.A.; Kolhe, J.P.; Talole, S.E. Performance analysis of generalized extended state observer in tackling sinusoidal disturbances. IEEE Trans. Control Syst. Technol. 2013, 6, 2212–2223. [Google Scholar] [CrossRef]
- Ruderman, M.; Ruderman, A.; Bertram, T. Observer-based compensation of additive periodic torque disturbances in permanent magnet motors. IEEE Trans. Ind. Inf. 2013, 2, 1130–1138. [Google Scholar] [CrossRef]
- Zheng, S.; Han, B.; Guo, L. Composite hierarchical antidisturbance control for magnetic bearing system subject to multiple external disturbances. IEEE Trans. Ind. Electron. 2014, 12, 7004–7012. [Google Scholar] [CrossRef]
- Joo, Y.; Park, G.; Back, J.; Shim, H. Embedding internal model in disturbance observer with robust stability. IEEE Trans. Autom. Control 2016, 10, 3128–3133. [Google Scholar] [CrossRef]
- Aldeen, M.; Trinh, H. Reduced-order linear functional observer for linear systems. IEE Proc. Control Theory Appl. 1999, 5, 399–405. [Google Scholar] [CrossRef]
- Xiong, Y.; Saif, M. Unknown disturbance inputs estimation based on a state functional observer design. Automatica 2003, 8, 1389–1398. [Google Scholar] [CrossRef]
- Ding, Z. Differential stability and design of reduced-order observers for non-linear systems. IET Control Theory Appl. 2011, 2, 315–322. [Google Scholar] [CrossRef]
- Back, J.; Shim, H. Reduced-order implementation of disturbance observers for robust tracking of nonlinear systems. IET Control Theory Appl. 2014, 17, 1940–1948. [Google Scholar] [CrossRef]
- Kim, K.S.; Rew, K.H.; Kim, S. Disturbance observer for estimating higher order disturbances in time series expansion. IEEE Trans. Autom. Control 2010, 8, 1905–1911. [Google Scholar]
- Kim, K.S.; Rew, K.H. Reduced order disturbance observer for discrete-time linear systems. Automatica 2013, 4, 968–975. [Google Scholar] [CrossRef]
- Kim, I.H.; Son, Y.I.; Kang, S.H.; Lim, S. Robust position control of DC motor using a low-order disturbance observer against biased harmonic disturbances. Proc. IEEE Int. Conf. Ind. Electron. Sustain. Energy Syst. 2018, 484–489. [Google Scholar]
- Son, Y.I. State estimation of LTI systems with unknown input and sensor disturbances using adaptive PI observer. IEICE Trans. Fundam. 2011, 3, 1002–1005. [Google Scholar] [CrossRef]
- Kim, H.; Shim, H.; Jo, N.H. Adaptive add-on output regulator for rejection of sinusoidal disturbances and application to optical disc drives. IEEE Trans. Ind. Electron. 2014, 10, 5490–5499. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).