Abstract
The growing popularity of Personal Light Electric Vehicles (PLEVs), such as e-scooters, has revolutionized urban mobility by offering compact, cost-effective, and environmentally friendly transportation solutions. However, safety concerns, including inadequate infrastructure, poor protective measures, and high accident rates, remain critical challenges. This paper presents the design and development of an innovative self-balancing microvehicle under the H2020 LEONARDO project, which aims to address these challenges through advanced engineering and user-centric design. The vehicle combines features of monowheels and e-scooters, integrating cutting-edge technologies to enhance safety, stability, and usability. The design adheres to European regulations, including Germany’s eKFV standards, and incorporates user preferences identified through representative online surveys of 1500 PLEV users. These preferences include improved handling on uneven surfaces, enhanced signaling capabilities, and reduced instability during maneuvers. The prototype features a lightweight composite structure reinforced with carbon fibers, a high-torque motorized front wheel, and multiple speed modes tailored to different conditions, such as travel in pedestrian areas, use by novice riders, and advanced users. Braking tests demonstrate deceleration values of up to 3.5 m/s2, comparable to PLEV market standards and exceeding regulatory minimums, while smooth acceleration ramps ensure rider stability and safety. Additional features, such as identification plates and weight-dependent motor control, enhance compliance with local traffic rules and prevent misuse. The vehicle’s design also addresses common safety concerns, such as curb navigation and signaling, by incorporating large-diameter wheels, increased ground clearance, and electrically operated direction indicators. Future upgrades include the addition of a second rear wheel for enhanced stability, skateboard-like rear axle modifications for improved maneuverability, and hybrid supercapacitors to minimize fire risks and extend battery life. With its focus on safety, regulatory compliance, and rider-friendly innovations, this microvehicle represents a significant advancement in promoting safe and sustainable urban mobility.
1. Introduction
In recent years, the popularity of light electric vehicles for micromobility has increased dramatically [1,2]. The main advantages of these vehicles are their size, manoeuvrability, cost-effectiveness and the existence of multiple ride-sharing services in urban areas. Electric kick scooters (or e-scooters) are part of the large family of new mobility services supported by information and communication technologies [3]. For short-distance journeys, whether shared or privately owned, e-scooters are a relatively innovative and environmentally friendly transport solution that contributes to reducing traffic congestion and air pollution [4,5,6]. Several types are commercially available, which differ based on their range, smart functions and target users. E-scooters, foldable e-scooters, off-road e-scooters, performance e-scooters, seated e-scooters, and three-wheeled e-scooters are just some of the many types [7]. The increasing expansion of e-scooters, and in particular, of the sharing models, has also started social, political, legislative reactions and health concerns, as well as raised questions about their actual sustainability [8,9,10,11,12].
The lack of adequate infrastructure and the poor use of personal protective systems have led to a radical increase in injuries and even fatal accidents related to e-scooters [13,14,15]. Several studies have attempted to investigate the causes of e-scooter injuries and their nature [16,17]. It was shown that the most common cause of injuries is falling from the scooter. Crashes and near-crash accidents are attributed to behavioral (14%), environmental (14%) and infrastructural factors (67%) [18]. Safety is consequently at the forefront of micromobility policies worldwide, and the development of new models cannot, therefore, be separated from the adoption of technical measures that contribute to reducing the danger of crashes [19]. The ability to stop completely in the shortest possible time in the event of danger is the first safety requirement [20]. The aspects to be investigated are braking power, modulability, and the technical activation time of the braking system. A study concerning, among other things, braking tests can be found in [2]. The study conducted by Siebert [21] revealed several factors in the ergonomic design of shared e-scooter braking systems that can influence the safe use of e-scooters in the road environment.
The present work describes the design of an innovative light electric vehicle for personal use, developed within the framework of the European project Leonardo (VehicLE fOr staNd-Alone and shaReD mObility—GA 101006687) [22]. The aim is to produce a vehicle with innovative features that, while complying with existing legislation, meets the right balance between comfort and functionality to meet the everyday mobility needs of potential users. To this end, particular attention is given to acceleration, deceleration, and stability, also compared with other reference microvehicles available in the market. The vehicle, in different forms, is also part of the experimental campaigns of the LIFE2M (Long LIFE to Micromobility—GA 101074307) and the IN-MOB (INnovative products for sustainable microMOBility—GA 101115057) European projects that aim to test sustainable and safe micromobility solutions in urban contexts. At the time of writing, the vehicle is being tested in a pilot in Brussels (BE) to evaluate its performance, safety, and integration within existing mobility systems.
2. Comprehensive Overview of Legal and Design Standards for PLEVs
Personal Light Electric Vehicles (PLEVs) are motor vehicles with an electric drive that can be either standing or seated, featuring a steering bar or handlebar, and with some limits in power, speed, and dimensions. These vehicles integrate technology for balance, propulsion, steering, and deceleration. In particular, the vehicles that have achieved the greatest popularity, along with e-bikes, are e-scooters. The design of e-scooters is similar for most models. Differences are found more widely in the type of brakes, the presence of suspension, the wheels, and the tires used. A larger wheel diameter makes it easier to overcome small obstacles and reduces the risk of instability when driving. A soft tire provides a suspension element between the rider and the road, so that the effects of bumps on the handlebars are mitigated, making the ride safer. Disc brakes offer a more robust and reliable but more expensive braking system. The innovative microvehicle for light urban mobility, developed in the Leonardo project, is being designed and developed. It closely resembles an e-scooter, comprising two in-line wheels, a deck, and a handlebar connected to the wheels via a steering column, ridden standing up. However, this new vehicle introduces several novel features: a large-diameter front wheel with a self-balancing system, no suspension, and acceleration controlled by tilting the deck. This requires a different riding mode compared with traditional e-scooters. In addition, the use of composite materials ensures a low weight, which is lower than that of almost all e-scooter models on the market. A self-balancing vehicle uses sensors, gyroscopic systems, and motors to maintain balance, requiring minimal input from the driver. Algorithms can help riders maintain control of the e-scooter in complex road scenarios.
This work deals with the development of a vehicle that implements all the listed features, matching a high level of safety and adequate performance characteristics. Some of these features (acceleration and speed setups, self-balancing motorized wheel) represent innovations compared with scooter models on the market, while others (large front wheel, reduced weight) constitute improvements. The rapid evolution of PLEVs and their widespread adoption have outpaced the development of relevant standards and legal provisions. However, countries like Germany have developed comprehensive legislation for e-scooters, which served as a foundation, complemented by European community standards where applicable. The Ordinance on Small Electric Vehicles [23], issued by the German Federal Ministry of Justice and Consumer Protection, establishes regulations allowing standing or self-balancing vehicles to circulate on the road. The legal regulations cover several aspects of vehicle design and usage:
- General vehicle conformation;
- Presence of accessory devices;
- Dynamic and performance characteristics;
- Electrical safety and electromagnetic compatibility;
- Driver’s competence and road behavior;
- Driver’s ability and safety.
Additionally, evaluating the dynamic and performance behavior of existing vehicles provides useful insights for improving driving comfort and safety, even if not legislatively mandated. These factors directly or indirectly influence the design and performance characteristics of the Leonardo vehicle. Therefore, it is crucial to explicitly consider these guidelines, whether legal requirements or opportunities for enhanced driving comfort, in the design of the Leonardo microvehicle prototype.
The standard scientific literature and regulations often refer to PLEVs more broadly than just e-scooters (an in-depth discussion can be found, for example, in the work by Gulino et al. [24]). When a distinction is made between self-balancing and non-self-balancing vehicles, regulations generally focus on the former. Self-balancing PLEVs are vehicles that autonomously maintain their balance using integrated balance, propulsion, steering, and deceleration technology. These vehicles employ advanced sensors and algorithms to continuously monitor their position and automatically correct any imbalances, ensuring stability and safety for the rider. The Leonardo microvehicle belongs to the self-balancing class; still, knowing the specific regulations applying to the whole PLEV category is the first step to aim at safety already from the microvehicle design stage.
2.1. Conformation of the Vehicle
According to the eKFV regulation, PLEVs must adhere to the following technical requirements:
- Overall dimensions:
- –
- Maximum width: 700 mm;
- –
- Maximum height: 1400 mm;
- –
- Maximum length: 2000 mm;
- Maximum empty mass: 55 kg;
- The handlebar or steering of a seated PLEV must be longer than 500 mm (eKFV §1 ).
- The vehicle must have a valid insurance plate and be marked with a vehicle identification number and a factory plate (eKFV §2 ).
2.2. Accessory Devices
Recommendations on accessory devices primarily concern lighting, markers, direction indicators, and the horn. Lighting equipment must comply with the requirements outlined in STVZO and UNECE regulations [25,26]. Vehicles should be equipped with an alternator, a battery, a rechargeable energy storage device, or a combination of these, to power the front and rear position lamps. Concealing lighting equipment is not allowed. While lamps and their power sources may be removable, they must be installed during twilight, darkness, or whenever visibility demands. The front lighting must consist of at least one white luminous front light. Additionally, the vehicle must have at least one red rear light and one red non-triangular reflector. The design of the lighting equipment must be officially authorized.
Lateral marking must be conducted on both sides using yellow reflectors or with continuous retro-reflective white stripes on the tires or rims of the front and rear wheels. In Germany, the installation of direction indicators is not mandatory. The rear direction indicators may turn with the steering. The distance from the rearmost point of the vehicle to the direction indicators must not exceed 300 mm. The mounting heights for the front and rear direction indicators must not exceed 1400 mm. The minimum mounting height for the rear direction indicators can be 150 mm if the vertical angle of geometric visibility is at least 25° above the horizontal. The installation of at least one loud, clear bell as an audible signal is mandatory.
2.3. Dynamic and Performance Characteristics
PLEVs are limited to a maximum design speed of not less than 6 km/h and not more than 20 km/h. The continuous rated power of self-balancing vehicles must be limited to 1400 W, and 60% of the rated continuous power must be used for self-balancing. Specific requirements are established for the braking capacity of the vehicle. To fulfill the requirements for deceleration specified in eKFV [23], the vehicle must have two independent brakes, which must
- be able to brake the vehicle to a standstill;
- act up to the maximum speed;
- reach deceleration values of at least 3.5 m/s2;
- achieve a minimum deceleration of 44% of the total braking effect in case of failure of the respective other brake.
To meet these requirements for driving dynamics, the vehicle must fulfill the tests carried out by complying with the conditions specified in the annex on testing requirements and requirements for driving dynamics of the eKFV. The conditions regard the road surface, ambient temperature, battery charge, tire pressure, and the masses of the vehicle and driver.
When testing the deceleration devices, the task is to drive straight ahead on a test track at the maximum design speed and to decelerate simultaneously at a defined point with all deceleration devices as quickly as possible to a standstill, as long as this is possible without the risk of falling. If there is a risk of falling, for example, due to a blocked front wheel, the braking force applied must be reduced accordingly. The stopping distance required for this must be specified to two decimal places. The measurement must be repeated for at least five consecutive examinations (three if a single brake is operated). The average deceleration is to be calculated according to Equation (1).
a is the average deceleration, v is the initial speed, s is the measured stopping distance. In general, the deceleration a can also be related to the braking force and the total mass m (vehicle plus driver) through Newton’s second law:
This relation highlights the importance of both the available braking force and the system mass when designing for safety-compliant performance.
Furthermore, the minimum deceleration in the case of the failure of a braking device must be checked. In the case of independently operated brakes, the test of the minimum deceleration shall be carried out by operating only one brake in at least three successive braking tests in the same way as the previous braking test. In the case of combined braking devices, one of the brakes must be suitably deactivated, and the previous braking test repeated. The deceleration applied must correspond to 44 % of the prescribed minimum deceleration of 3.5 m/s2.
Additional requirements concern the dynamic stability of the vehicle when passing over some unevenness in the road surface, such as depression, kerb, or small ramps. In particular, the vehicle must always remain controllable by the driver and the desired direction of travel must be maintained, whereby a maximum deviation between the target and real trajectories of 20° is permissible. During the test, self-balancing vehicles must maintain balance. The self-balancing function must not suddenly deactivate.
2.4. Electrical Safety and Electromagnetic Compatibility
With any electric vehicle, electrical safety is fundamental. The lithium-ion batteries used in vehicles can quickly overheat due to excessive current or cooling problems. They are also susceptible to catching fire and even exploding if they are mechanically damaged [27,28]. This obviously has implications for the design of the battery pack and the surrounding vehicle structure. Appropriate electrical safety measures must be taken to prevent the battery pack from short-circuiting or overheating. Alternative power sources with limited fire risk, such as supercapacitors, can also be employed for micromobility purposes. Additional highlights on these aspects can be found in previous research by the authors [29,30,31,32], together with implementation plans on the Leonardo vehicle [22] that can increase the life of the vehicle by four times and decrease the charge time by half while maintaining approximately the same energy density (220 Wh). In the event of an electrical system failure, it is important that the vehicle returns to a safe state that allows the operator to safely stop. This is a very important consideration for self-balancing vehicles that rely on motor control systems to keep the vehicle upright and to allow it to drive and stop. Vehicles within the scope of Regulation (EU) No. 168/2013 [33] must comply to requirements that are also part of UNECE Regulation [34], while the safety of charging equipment is governed by Directive 2006/42/EC (Machinery Directive) [35]. The vehicle has to fulfill the requirements for electromagnetic compatibility according to [36] and it must be protected against direct contact with all voltage-carrying components. In addition, measures of protection against manipulation and unintentional adjustment of all operating parts and components must be implemented [37]. For examples, in marketed e-scooters this is typically reached by the integration of high-voltage components in sealed compartments as the steering column or the deck.
2.5. Driver Competence and Road Behavior
The regulations related to the driver’s competence and to the behavior of the vehicle on the road indicate the roads or lanes in which vehicles may travel. However, the requirement to drive as far to the right as possible on lanes with several lanes must not be deviated from. Drivers of PLEVs must ride one behind the other. Passenger transport and the operation of a trailer are prohibited. The parking of PLEVs is permitted on pavements as long as the way is not blocked for pedestrians or wheelchair users. Basically, drivers of PLEVs are subjected to the regulations of the Road Traffic Act (eKFV §9). Therefore, they must be familiar with them to comply. This may require a minimum age of the driver or proof of a driving license.
According to the eKFV (Annex to §7.1), the vehicles must be such, both in operating and in transport condition, that
- their normal operation does not harm, unavoidably endanger, obstruct or inconvenience anyone;
- the driver is protected from injury as far as possible, especially in case of accidents;
- severity and consequence of injuries remain as low as possible.
So, the vehicle must be designed in such a way that the element to control the engine power automatically returns to the zero position within one second when the power train of self-balancing vehicles is turned off.
3. Dynamic Behaviour and Performance Analysis of E-Scooters
3.1. Deceleration and Acceleration of E-Scooters
Several authors have conducted braking tests on various commercial e-scooters, each with different characteristics and power [38]. The test methods differ in some details, which can be found in the cited articles. Basically, the tests involve accelerating the vehicle until a specific speed is reached, followed by abrupt braking to bring the vehicle to a complete stop. The brake configurations of the tested vehicles are reported in Table 1, where the deceleration for the Leonardo vehicle is presented for convenience (refer to Section 5.4 for more in-depth information). The values of maximum deceleration, mean deceleration, and the distance required to stop the vehicle are discussed.

Table 1.
Brake systems and acceleration performance of several e-scooters from different literature sources.
Data from different sources show significant variation. However, it can be observed that e-scooters equipped with disc brakes tend to achieve higher maximum deceleration values. This does not necessarily translate to higher mean deceleration values, as these depend on several other factors, including rider mass, braking force application, and surface condition. The variability in braking performance is also due to inconsistent initial speeds during braking tests. According to Garman et al. [2], the braking distance increases polynomially with the scooter’s speed before braking. The rider significantly influences the braking dynamics. Not only does the rider’s weight alter total vehicle mass, but their posture—particularly leaning backward—shifts the center of gravity. Heavier riders experience reduced deceleration and longer braking distances under the same braking force [39]. Environmental conditions also impact braking. Table 2 presents the differences in braking distance across various surfaces and slopes, as tested by Novotny et al. [40].
Table 2.
Braking distance by road conditions (source: [40]).
Another important performance factor is acceleration. This depends strongly on drive mode (eco/turbo), motor power, and system configuration [41,42]. E-scooters with 500 W (maximum for e-scooters in Europe) motors significantly outperform lower-powered models [43]. Table 3 presents a comparison of mean acceleration values across various vehicle types. As shown, PLEVs exhibit an average acceleration of 1.25 m/s2, which is significantly higher than bicycles, comparable to pedelecs, and lower than mopeds or cars.
Table 3.
Comparison of mean acceleration for various vehicle types, including different e-scooter power classes and common PLEVs. Sources: [38,43].
3.2. Safety Devices
Visibility and signaling are crucial for ensuring rider safety, especially during maneuvers like lane changes. Manual gestures are often insufficient for communication in traffic. Installing electronic turn indicators helps maintain control while communicating directional intent. Additional lighting enhances both the visibility of the e-scooter to others and the rider’s own ability to see the road. An extra brake light feature in rear lamps can further improve safety. Finally, rearview mirrors enable the rider to monitor traffic behind with minimal body movement, reducing the risk of accidents due to sudden maneuvers.
3.3. Other Important Features
In addition to acceleration and braking, various physical and geometric factors contribute to the dynamics and safety of e-scooters. These include ground clearance, wheel and tire configuration, and steering geometry. Higher ground clearance allows safer traversal of small obstacles and is directly related to wheel diameter [43,44]. Pneumatic tires provide improved comfort and grip due to their shock-absorbing capabilities, whereas solid tires offer durability but less of a suspension effect [45]. Handlebar inclination and caster angle (steering head angle) affect steering stability. A greater head angle increases the trail, improving straight-line stability but reducing agility [46]. Modern e-scooters typically have a headtube angle of 75–80°, trail values of 20–30 mm, and a wheelbase of 750–900 mm. Compared with bicycles, they feature smaller wheels and shorter wheelbases, making them less inherently stable and requiring both hands on the handlebars for safe operation [47].
4. Basis for Vehicle Safety Concept
A vehicle safety concept is now derived from the previous chapters. In order to assess this in terms of expected use, this chapter also takes into account the results of a survey of 1,500 PLEV users in the period from 18 October 2021 to 17 November 2021 in the context of the LEONARDO project, to determine micromobility users’ preferences in terms of vehicle features.
4.1. Questionnaire
A detailed analysis of the survey will not be presented here, that can be retrieved in the work by Gulino et al. [24]. Nevertheless, an insight into the survey of 1500 PLEV users is provided and important key statements are recorded. Such a representative online survey was conducted to collect demographic data (age, gender, population density) and examine the various aspects of e-scooter usage. Each section examines specific questions from the survey, highlighting the trends, user behaviors, and areas of concern or interest related to PLEVs. By analyzing the data, we aim to gain a deeper understanding of how these vehicles are integrated into everyday life, their safety implications, and the potential improvements that could enhance their usability and adoption.
In summary, the following main results were analyzed among the participants of the survey, including frequency of use, access methods, areas of use, and safety practices among PLEV users. The answers also looked into the public’s views on regulatory changes and the desired features and functionalities that could make PLEVs more efficient and safer for all. Through this analysis, the research would provide valuable insights that can inform future developments and policies surrounding the use of PLEVs in urban environments.
- Most people use PLEVs as a rental model;
- PLEVs are used at all times of the day, but especially in the evening and at night;
- More people use PLEVs in pedestrian areas and on bike paths than on the street;
- Most users of PLEVs do not wear a helmet, which is consistent with other literature sources [48];
- The three most frequently mentioned improvements that would be supported are mandatory helmets, raising the minimum age for riding, and lowering the permitted alcohol limit.
Improving the ability of PLEV users to handle uneven road surfaces and navigate curb edges is crucial for enhancing user safety and comfort. Simultaneously, advancements in maneuverability, acceleration, cornering stability, and braking force will contribute to a smoother and safer driving experience. Improving the safety of PLEVs can be achieved by focusing on key areas such as curb navigation, handling of uneven and icy surfaces, and signaling capabilities. Implementing enhancements in these aspects will boost user safety and comfort while simultaneously reducing feelings of insecurity in various driving conditions. The high percentage of users who find curb navigation problematic suggests a need to enhance the suspension or tire design to better handle changes in road levels. Focusing on these improvements will ensure a smoother and safer driving experience for PLEV users, addressing the primary concerns identified in the analysis. Here, too, pneumatic tires with a large diameter and increased ground clearance are a good solution for the uncertainties involved in driving over edges and on uneven surfaces. Another uncertainty exists when indicating the change in direction by hand signal. This uncertainty can be countered by installing direction indicators on the vehicle.
4.2. Synthesis of Expected Features for the Microvehicle Concept
Based on the reported aspects in terms of safety regulations, dynamic characteristics, and features expected by the users, the following elements can be listed.
The braking system should consist of two independent systems capable of achieving a minimum deceleration of 3.5 m/s2, operable via the handlebars with the option for an additional foot brake to accommodate user preferences and ensure safe braking. Pneumatic tires with large diameters not only contribute to stable riding but also provide a sense of safety when traversing edges and uneven surfaces, while increasing ground clearance. The proper selection of the caster is essential for maintaining stable straight-ahead driving. Additionally, the incorporation of four safety devices —lighting devices, electrically operated left/right direction indicators, and a bell—is highly recommended. These devices enhance both the operator’s awareness and the visibility of PLEV to other road users, reducing the likelihood of accidents. Adhering to the legal regulations outlined in the eKFV [23] in Germany ensures comprehensive safety considerations. Furthermore, implementing a minimum age requirement or a “PLEV driving license" could enhance road safety by confirming the operator’s fitness for participation in traffic. Weight-dependent control of the motor could also mitigate misuse associated with the transport of additional passengers. The Table 4 shows an overview of the expected features for the vehicle concept to be developed.
Table 4.
Key features and rationale of the developed vehicle concept.
5. Dynamic Behaviour and Performance Analysis of E-Scooters
The present section quantitatively and qualitatively assesses the characteristics of the Leonardo prototype that has been designed based on the elements reported in Table 4.
5.1. Prototype Overview: LEONARDO Vehicle
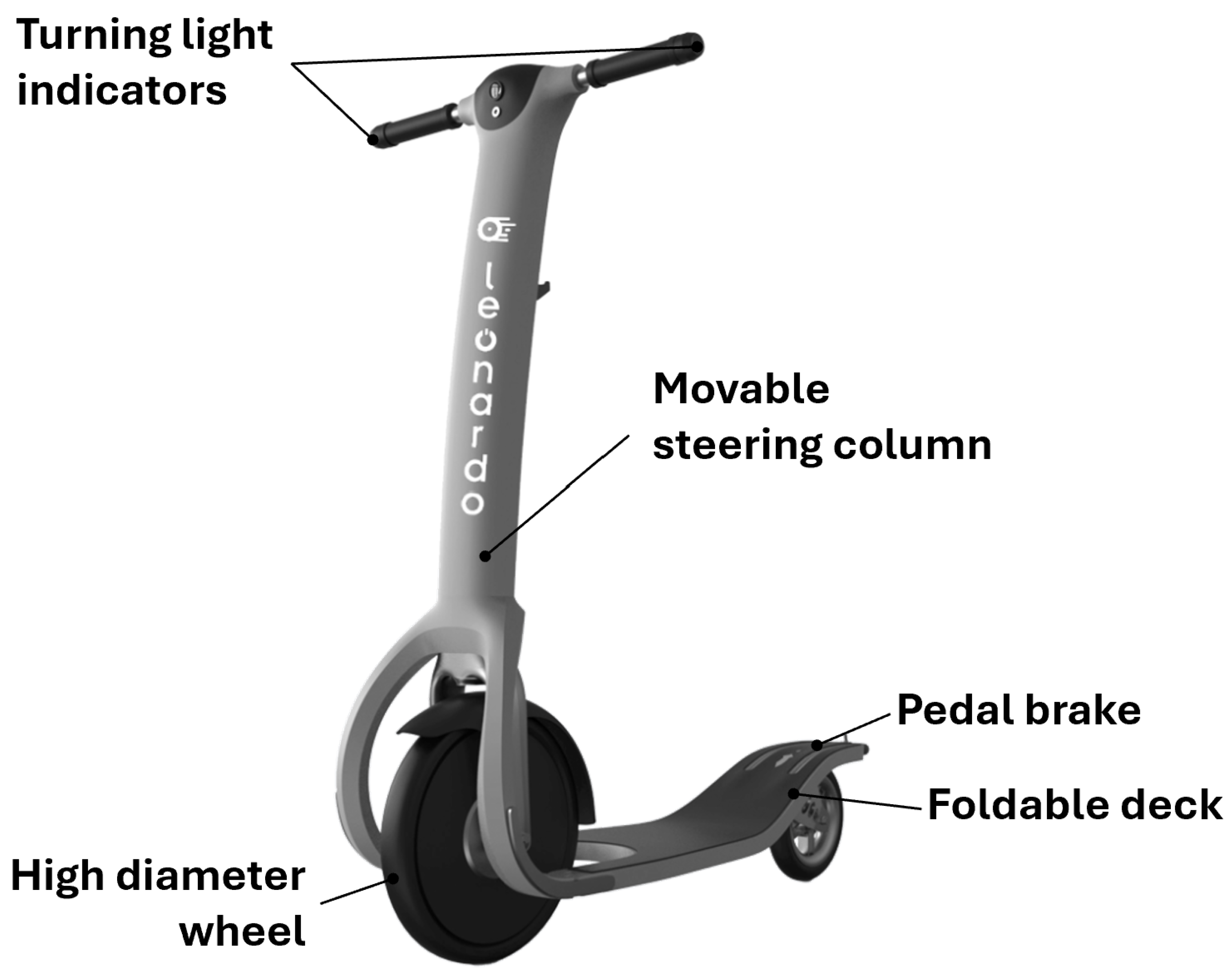
As part of the H2020 LEONARDO project, a prototype of a self-balancing electric microvehicle has been developed. Its main characteristics have been designed to maximize both dynamic performance and operational safety. An overall view of the vehicle is shown in Figure 1, which also highlights the large diameter front motorised wheel. This prototype serves as the foundation for the assessment of the dynamic characteristics of the vehicle as a whole. Self-balancing is governed by a Proportional Derivative (PD) controller, with control loops that are based on output from an accelerometer (placed in the upper part of the steering column, directly underneath the dashboard). The control logic is better described in a previous publication [22].
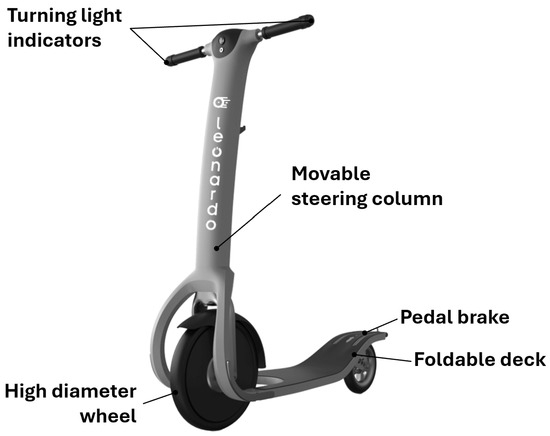
Figure 1.
Prototype of the LEONARDO self-balancing vehicle.
The vehicle features a steering column and deck produced from a composite material reinforced with carbon fiber. The propulsion system is based on a front-wheel motor, equipped with a gyroscopic control system similar to that of monowheels. This configuration enables the vehicle to self-balance and provides the rider with intuitive control. Acceleration and deceleration are achieved by pushing or pulling the steering column. The total mass of the vehicle is 10 kg. A key mechanical aspect is the joint between the steering column and the deck, which allows the rotation of the column around an axis parallel to the motor axis. This design, coupled with a positive caster, ensures both stability in straight motion and satisfactory handling performance. The batteries powering the motor and electronic control units are housed within the steering column.
5.2. Wheels
In the standard version, the vehicle is equipped with a 250 W electric motor in the front wheel. The motor is a 14″ wheel with spokes for e-bikes, being very light (1.8 kg) and having a high torque thanks to the internal planetary gearbox (up to 45 N·m). The current provided to the motor at each instant is determined by the position of the steering column; hence, the rider can accelerate or decelerate by pushing or pulling the column. The motorized wheel on the front mounts an air tire that enables higher riding comfort compared with solid wheels available on the market for kick-scooter applications; for the same reason, the 8.5″ non-motorized rear wheel also mounts an air tire.
5.3. Speed
Based on the concept expressed in Table 4, the maximum speed of the vehicle is set to 20 km/h. However, considering the innovative concepts behind this micromobility solution, several modes have been integrated into the internal logic to allow different speed settings. These modes are represented in the upper central area of the vehicle display as in Figure 2 and can be described as follows:

Figure 2.
The four different modes available on the vehicle enable the setup of the maximum speed.
- Trolley (TRO)—the electric motor in the front wheel is capable of moving both forward and backward, while the vehicle moves up to 6 km/h; this mode must be employed only when the rider is not on the deck, to enable the user to easily move the vehicle while he/she is walking (e.g., in the middle of a street, a plaza, or a shopping centre).
- Pedestrian (PED)—required by regulation EN 17128 [49] for self-balancing vehicles (and hence by some countries like Italy that apply it directly in their Codes of Circulation), it involves the limitation of speed up to 6 km/h to let the vehicle travel areas where only pedestrians are admitted (like kerbs or pedestrian areas).
- Standard (STD)—dedicated to novice riders, the maximum speed is set to 15 km/h; acceleration and deceleration ramps are soft, but the vehicle cannot travel on roads with a slope higher than 5% (limitation in current, and torque as a consequence).
- Advanced (ADV)—this mode uses the full potential of the electric motor, and the maximum speed is set to 20 km/h. Roads with a slope up to 15% can be travelled.
5.4. Braking System
The vehicle features two different, independent braking mechanisms. The first is the electronic (regenerative) braking, which in this case is also fundamental for the proper functioning of the self-balancing algorithm: while in motion, the internal control logic accelerates or decelerates the electric motor to let the user maintain the equilibrium with reduced effort. The second mechanism is the pedal brake, which is obtained directly on the deck and whose functioning is depicted in Figure 3. The rider can reach the pedal with the foot to push it (a). The pedal (b) moves towards the wheel and a friction pad contacts the wheel itself to enable the braking. This latter braking system is an emergency mechanism, because it wears the rear tire if used repeatedly. It may, however, be used as a backup in case of any reduction in electronic braking, e.g., downhill when electronic regenerative braking occurs with fully charged batteries. This mechanism makes the LEONARDO microvehicle the only self-balancing vehicle with mechanical braking. While the pedal brake provides an additional deceleration of approximately 0.4 m/s2, preliminary considerations regarding the energy nature of this brake suggest that stress, wear, and long-term durability of the pad should be further analyzed to ensure feasibility under frequent use scenarios.

Figure 3.
Procedure for brake pedal activation (a), mechanism from above (b), mechanism from below (c).
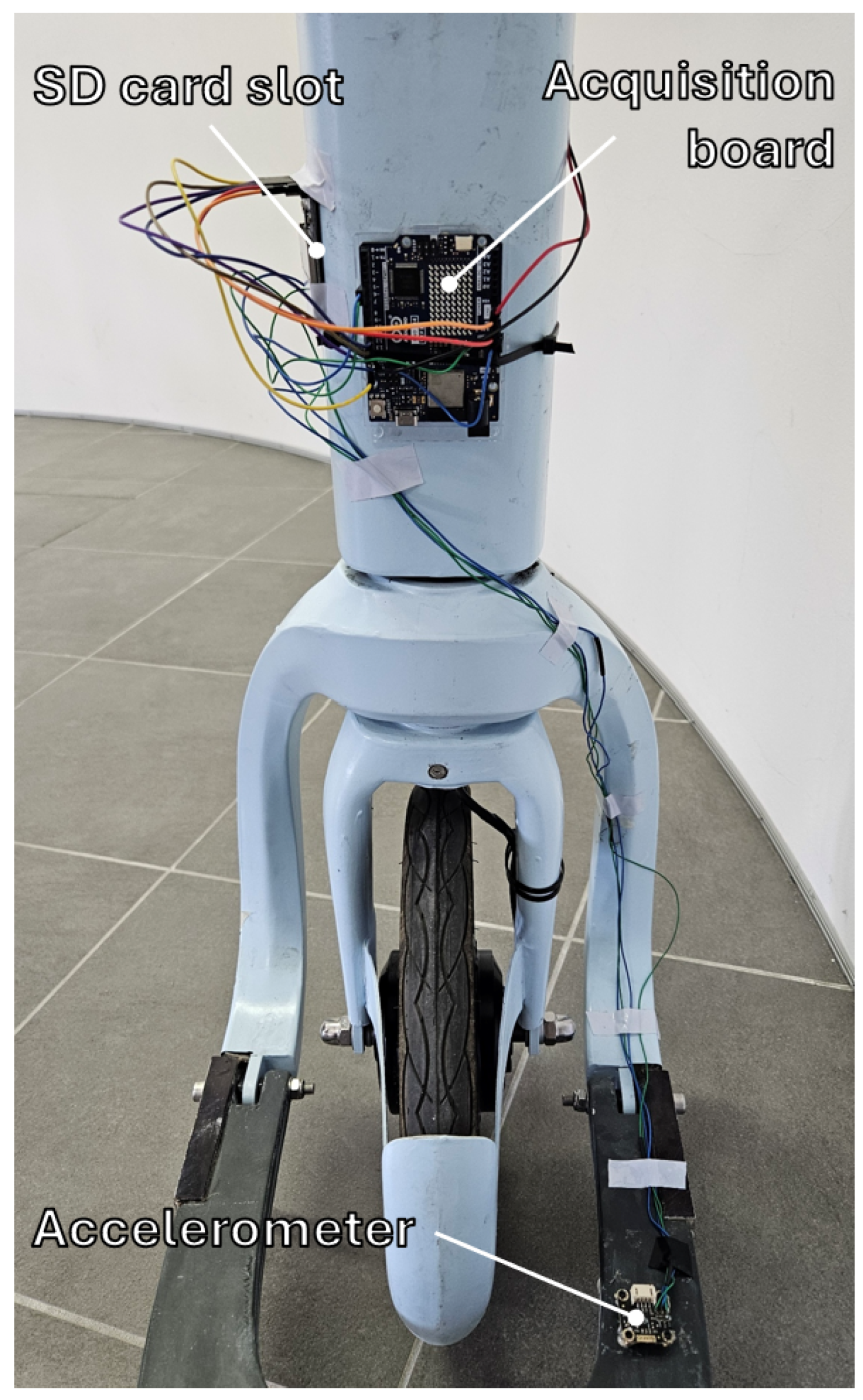
Braking tests have been performed on the vehicle to derive deceleration data using a three-axis digital accelerometer (model LIS2DH12) mounted on the front of the vehicle deck. Figure 4 reports all the elements mounted on the vehicle to perform the tests. Accelerometer data have been acquired by an Arduino R4 Minima board at a frequency of 400 kHz. Even though the vehicle features an accelerometer-based sensor underneath the dashboard, it could not be used for the purposes of these tests: the dashboard is rigidly connected to the steering column to provide feedback on mutual inclination between the steering column and deck. All the acceleration data in the tests that are collected by the integrated accelerometer are hence the superimposition of the contributions coming from the longitudinal dynamics of the deck and the inclination of the steering column. An SD card has been employed for storing the data directly onboard the vehicle, so that subsequent analyses can be performed on a PC.
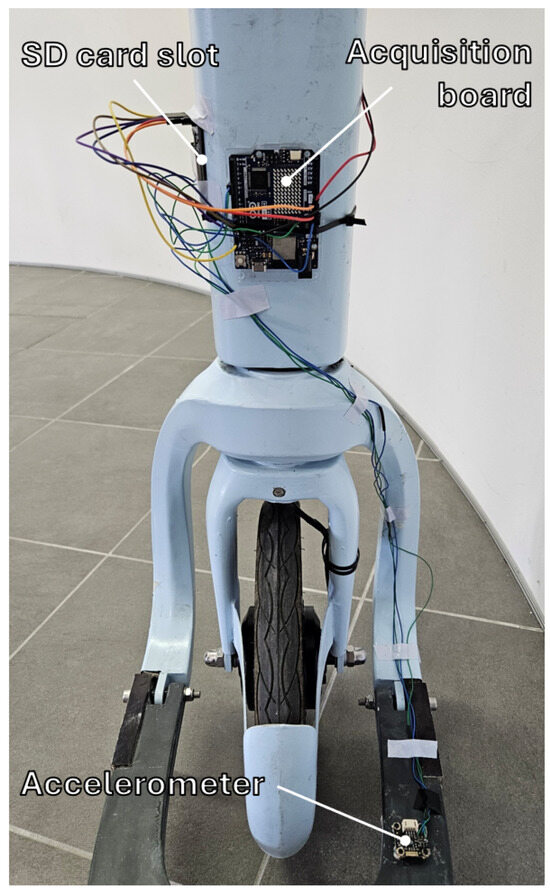
Figure 4.
Visualization of the elements constituting the measurement chain for the braking and acceleration tests.
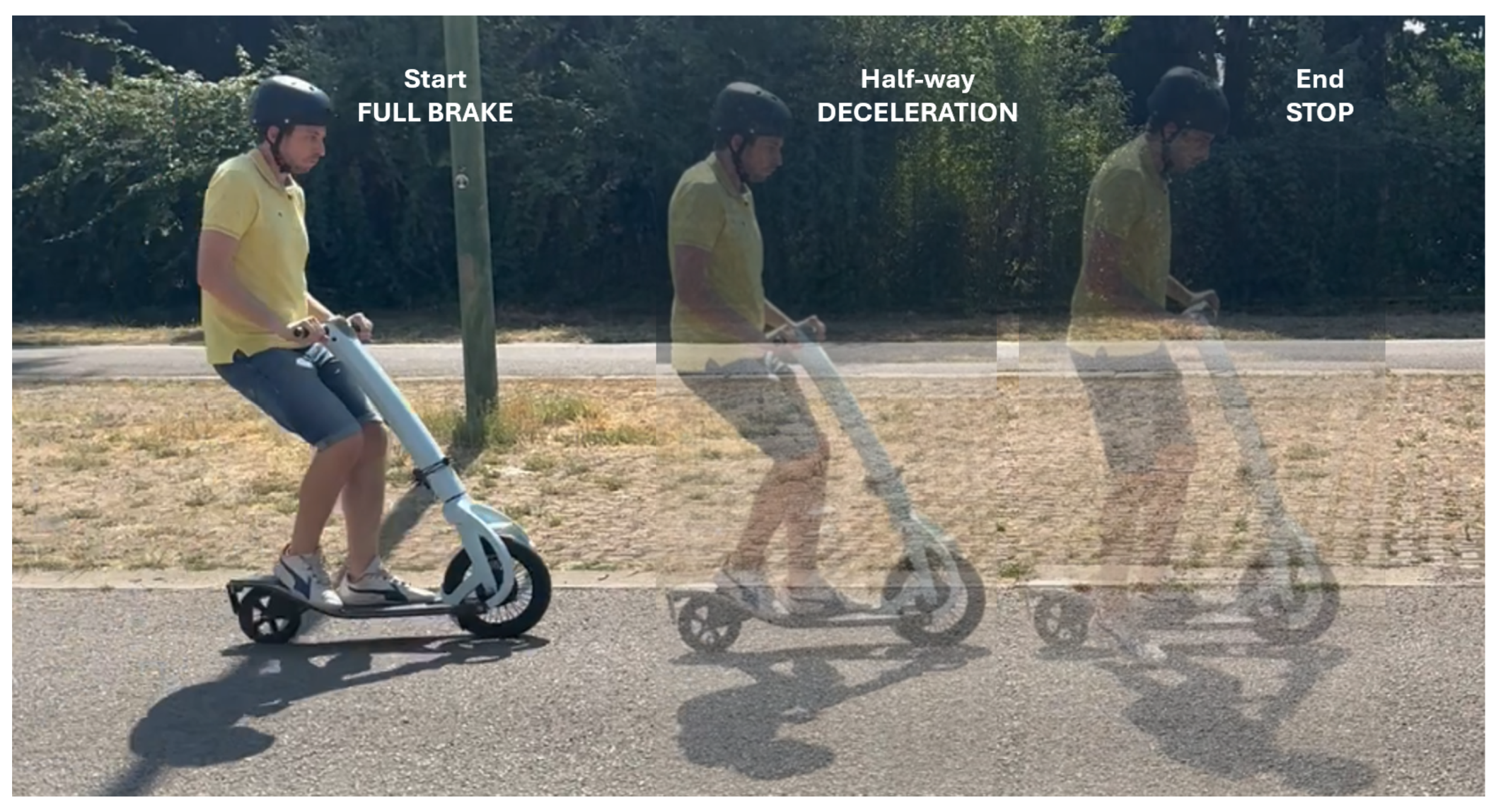
Figure 5 shows a sequence of three frames captured during one of the braking tests. The images illustrate the vehicle’s progression from initial braking to complete stop, providing a visual understanding of dynamic posture and stability during deceleration.
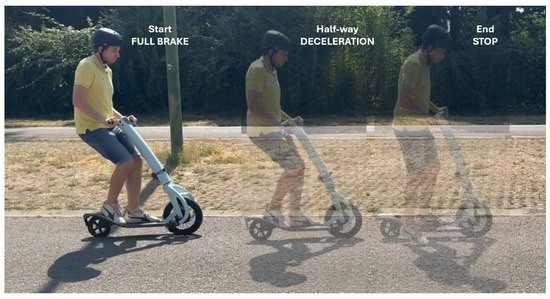
Figure 5.
Sequence of three frames showing the self-balancing microvehicle during a braking test.
Two tests have been performed, i.e., using the electronic braking alone and using the combination of electronic braking and pedal braking. The sole adoption of the pedal braking was not considered for safety reasons, since this would require disabling the electronic control and creating strong instabilities in the riding process. For repeatability reasons, each test has been performed five times, according to what was already described in Section 2.3. By electronic braking alone, the mean deceleration of the vehicle reaches 3.1 m/s2. Using also the pedal brake, the mean deceleration achieves a value of 3.5 m/s2.
This implies that the additional braking provided by the pedal is relevant (almost 0.5 m/s2); thanks to this, the Leonardo microvehicle becomes comparable to other e-scooters on the market in terms of braking performances and well above the average value for PLEVs. The value of deceleration is also in line with those required by the German regulation.
According to Newton’s second law, the braking force generated during deceleration depends on the total mass of the system (vehicle and rider) and the measured deceleration, as expressed in Equation (2). Assuming a total mass of approximately 80 kg, the electronic braking system alone generates a braking force of about 248 N, while the combined use of the pedal brake increases the force to approximately 280 N. These values confirm that the system is capable of meeting the required deceleration threshold of 3.5 m/s2 and underline the importance of the additional mechanical braking contribution. In case of failure of one brake, the remaining brake must still ensure 123.2 N.
5.5. Acceleration
As previously reported, the major innovation of the vehicle is represented by its self-balancing capability while maintaining the exterior shape of an e-scooter. Such a feature inherently involves limitations on the accelerations that can be achieved. The self-balancing algorithm is designed to maintain equilibrium, which involves smooth and gradual adjustments to acceleration (forward and backward) when in an almost still condition. Abrupt changes could compromise the stability of the rider and the vehicle as a whole. In modes where the speed is limited (like PED or STD, refer to Section 5.3), the acceleration ramps are additionally limited to ensure smooth transitions. In accordance with Equation (1), acceleration has been measured in five different tests with the same experimental layout described in Section 5.4, leading to an average acceleration of 0.355 m/s2. Such a value is below those presented in Table 3 for different types of microvehicles. However, the acceleration is fixed independently of the slope of the traveled road, i.e., uphill or downhill; several tests were also performed on an uphill route with a slope of 15% without detecting deficiencies when moving from a standstill (speed limit of 20 km/h still reached) or issues related to riding instability. Overall, acceleration and deceleration results obtained in the tests are shown in Table 5.
Table 5.
Results of deceleration and acceleration tests.
5.6. Lights and Electronic Devices
Figure 6 depicts the direction indicators available on the microvehicle. They are placed on the handlebar, in a position where the body of the rider is not a visual obstacle for drivers of following vehicles. A button panel allows the rider to activate and deactivate a specific turning light indicator (left or right). The presence of this feature is important for any type of microvehicle, but is particularly relevant for the LEONARDO one. Because of the lability of the steering column, stability can be maintained only if the rider firmly holds the handlebars. A “hazard” button activates both lights simultaneously, so that it can be used to signal the vehicle’s presence on the road in case of an emergency, even at a standstill. The flashing frequency of the lights is 1 Hz. The “hazard” option is also activated by default in case the PED mode is enabled, to clearly notify pedestrians about the presence of a vehicle in specific areas. On the same button panel, a buzzer (electric bell) can also be activated, whose sound can be perceived at more than 30 m from the vehicle. A front LED light can also be turned on by the same panel. A battery-powered rear light is also present that should be manually turned on by the user before the ride. A button-powered light allows to avoid routing the cables from the controller (in the steering column) to the rear of the vehicle. Since the mutual inclination between the deck and the column can be virtually null, the cables towards the rear would need to be long enough to avoid tension conditions when the vehicle is folded; at the same time, the cables should be sufficiently protected to avoid wear at each relative movement between the steering column and the deck. The use of a button-powered rear light hence drastically simplifies the design process and increases the overall reliability of the microvehicle.

Figure 6.
Direction indicators: hazard (both indicators on, left), right indicator (right above), left indicator (right below).
5.7. Additional Features for Compliance with Local Circulation Rules
The microvehicle alone cannot oblige the user to respect local rules for circulation. However, the microvehicle can implement solutions to favour the respect of these rules. In particular, on one side, the vehicle integrates an identification plate (right in Figure 7) that can be used in all countries where this is required. The plate is directly placed below the rear light. As of May 2025, Germany is the only European country that formally prescribes users to adopt an identification plate for their e-scooters. Italy is currently proposing a specific regulation on the topic; because of this, it is foreseen that in the near future, several countries will mandate the use of plates on e-scooters (and eventually on other microvehicles). At the same time, one of the main traffic violations is the use of the e-scooter by more than one person at a time. While electronic solutions may also be devised (e.g., a load cell on the deck to verify the weight on the deck at the start), the innovative nature of the vehicle allowed us to propose some alternatives. In particular, as can be seen on the left side of Figure 7, the available length for the rider’s feet on the deck is the same as a typical e-scooter. However, as can also be seen in Figure 5, the rider is meant to incline significantly to perform acceleration and deceleration actions. This involves

Figure 7.
The microvehicle prototype (left) and the related plate (right).
- not enough space is available onboard for an additional person during the ride;
- because of the continuous adjustments by the driver, the vehicle would be unstable and impossible to ride with an additional person, even at a slow speed.
6. Limitations
While the innovative microvehicle prototype demonstrates promising features and performance, several limitations should be acknowledged to provide a balanced assessment of its current development stage. First, crash tests have not yet been conducted, which limits the ability to fully evaluate the vehicle’s safety in collision scenarios. Second, real-world testing has been restricted to pilot runs in controlled environments, and broader testing across diverse urban contexts and user groups is necessary to validate its usability and integration into existing mobility systems. Third, the use of carbon fiber, while beneficial for reducing weight and enhancing durability, may contribute to a slight increase in the overall material price, environmental costs, and vehicle weight compared with alternative materials. Addressing these limitations in future research and development phases will be fundamental to advancing the vehicle’s design and ensuring its readiness for widespread adoption.
7. Conclusions
This work highlights the development process of an innovative microvehicle that combines the features of both monowheels and e-scooters, prioritizing safety from the design phase onwards. Regulations throughout Europe have been analyzed to enable the vehicle to circulate in the broadest possible number of countries, both in terms of local laws and international standards. At the same time, special attention was given to the ability of the riders and the possibility to enhance the user experience to reduce the risk of unexpected criticalities during the travel. Benchmarking with a wide range of e-scooters and other types of microvehicles has also been performed to obtain an overall picture of the possible performance the vehicle should exhibit.
Also, based on the obtained highlights, the vehicle features
- Wheels—a 14″ motorized wheel with high torque for the front (with a higher diameter compared with typical e-scooters) and 8.5″ for the rear, both with air tires to increase the riding comfort;
- Speed—four different setups for different use and rider experience levels have been introduced: TRO up to 6 km/h (the vehicle functions as a trolley, for use when walking), PED up to 6 km/h (for use in pedestrian areas during the ride), STD up to 15 km/h, ADV up to 20 km/h;
- Braking system—two brakes, one electrical and another mechanical (pedal), to reach up to 3.5 m/s2 of deceleration, which is analogous to other e-scooters and higher than the prescribed minimum in European regulations;
- Acceleration—smooth acceleration reduces the risk of riding instability, with an average value of approximately 0.35 m/s2 (from a standstill);
- Lights and electronic devices—direction indicators on the front let the riders signal their intentions without moving their hands away from the handlebar (this action is critical for stability in self-balancing vehicles);
- Additional features for compliance with local circulation rules—a plate on the rear is installed, since some countries request it for the circulation of these microvehicles.
The resulting vehicle has been employed in several different demonstrations in several European cities and is currently being upgraded to integrate additional features to increase its safety. For example, it is foreseen that an additional wheel will be implemented on the rear to let the rider stably stand on the deck even at very low speeds; in addition, the rear axle will be modified to resemble that of skateboards, so that the steering radius can be drastically reduced. Finally, an accumulator based on hybrid supercapacitors will allow for minimizing the risk of fire and explosions of Li-ion cells, while also increasing the life of the energy source up to 10 times.
In addition to its technical advancements, the proposed microvehicle is expected to have a positive societal impact by contributing to safer, more accessible, and sustainable urban mobility. Its compact size and versatility make it ideal for first- and last-mile transportation, especially in congested areas where conventional vehicles are inefficient. The vehicle’s focus on stability, user-friendliness, and compliance with international standards promotes inclusivity and encourages adoption among less experienced or vulnerable users, such as the elderly. Furthermore, the reduced environmental footprint, enabled by energy-efficient components and long-life power systems, supports broader goals of carbon emission reduction and cleaner cities.
With its continual focus on cutting-edge safety and rider-friendly innovations, this microvehicle will represent a leap forward in promoting safe and sustainable urban mobility across Europe.
Author Contributions
Conceptualization, M.-S.G., G.Z. and D.V.; Methodology, T.U. and P.M.; Formal analysis, S.P. and G.Z.; Investigation, M.-S.G., T.U. and P.M.; Resources, S.P.; Data curation, S.P.; Writing—original draft, M.-S.G.; Writing—review & editing, T.U. and D.V.; Supervision, G.Z. and P.M.; Funding acquisition, D.V. All authors have read and agreed to the published version of the manuscript.
Funding
The work has been performed in the context of the H2020 LEONARDO project (GA 101006687) and is currently progressing in the LIFE2M and IN-MOB projects (GA 101074307 and GA 101115057 respectively).
Data Availability Statement
Dataset available on request from the authors.
Acknowledgments
The authors would like to thank the whole LEONARDO research group for their past, present, future, continuous support in all the activities leading to the development and update of the vehicle.
Conflicts of Interest
Thomas Unger and Peter Miklis, employed by Verkehrsunfallforschung an der TU Dresden GmbH, declare that they have no conflicts of interest.
References
- García-Vallejo, D.; Schiehlen, W.; García-Agúndez, A. Dynamics, Control and Stability of Motion of Electric Scooters. In Advances in Dynamics of Vehicles on Roads and Tracks. IAVSD 2019; Lecture Notes in Mechanical Engineering; Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A., Eds.; Springer: Cham, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Garman, S.; Como, I.C.; Wishart, J.; O’Brien, K.; McLean, S. Micro-Mobility Vehicle Dynamics and Rider Kinematics During Electric Scooter Riding; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Shibayama, T.; Emberger, G. New mobility services: Taxonomy, innovation and the role of ICTs. Transp. Policy 2020, 98, 79–90. [Google Scholar] [CrossRef]
- Hollingsworth, J.; Copeland, B.; Johnson, J. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Carrara, E.; Ciavarella, R.; Boglietti, S.; Carra, M.; Maternini, G.; Barabino, B. Identifying and selecting key sustainable parameters for the monitoring of e-powered micro personal mobility vehicles. Evidence from Italy. Sustainability 2021, 13, 9226. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of micro-mobility: Analysis of E-scooter crashes by mining news reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef]
- Goh, Z.W.; Nor, N.H.M. Design of Mobile Scooter to Increase Flexibility and User Friendliness. Res. Prog. Mech. Manuf. Eng. 2022, 3, 988–997. [Google Scholar]
- Bozzi, A.; Aguilera, A. Shared E-Scooters: A Review of Uses, Health and Environmental Impacts, and Policy Implications of a New Micro-Mobility Service. Sustainability 2021, 13, 8676. [Google Scholar] [CrossRef]
- Kjærup, M.; Skov, M.; van Berkel, N. E-Scooter Sustainability—A Clash of Needs, Perspectives, and Experiences. In Human-Computer Interaction—INTERACT 2021; Lecture Notes in Computer Science; Ardito, C.E.A., Ed.; Springer: Cham, The Netherlands, 2021; Volume 12934, pp. 421–440. [Google Scholar] [CrossRef]
- Milakis, D.; Gebhardt, L.; Ehebrecht, D.; Lenz, B. Is micro-mobility sustainable? An overview of implications for accessibility, air pollution, safety, physical activity and subjective wellbeing. In Handbook of Sustainable Transport; Finger, M., Audouin, M., Eds.; Edward Elgar Publishing: Cheltenham, UK, 2020; pp. 180–189. [Google Scholar] [CrossRef]
- James, O.; Swiderski, J.; Hicks, J.; Teoman, D.; Buehler, R. Pedestrians and E-Scooters: An Initial Look at E-Scooter Parking and Perceptions by Riders and Non-Riders. Sustainability 2019, 11, 5591. [Google Scholar] [CrossRef]
- Sarı, C.; Dal, N. The sharing economy business model of e-scooters in the context of sustainable transportation. Dicle Üniversitesi İktisadi İdari Bilim. Fakültesi Derg. 2025, 15, 497–525. [Google Scholar] [CrossRef]
- Aizpuru, M.; Farley, K.X.; Rojas, J.C.; Crawford, R.S.; Moore, T.J., Jr.; Wagner, E.R. Motorized scooter injuries in the era of scooter-shares: A review of the national electronic surveillance system. Am. J. Emerg. Med. 2019, 37, 1133–1138. [Google Scholar] [CrossRef]
- Trivedi, T.K.; Liu, C.; Antonio, A.L.M.; Wheaton, N.; Kreger, V.; Yap, A.; Schriger, D.; Elmore, J.G. Injuries associated with standing electric scooter use. JAMA Netw. Open 2019, 2, e187381. [Google Scholar] [CrossRef]
- Toofany, M.; Mohsenian, S.; Shum, L.K.; Chan, H.; Brubacher, J.R. Injury patterns and circumstances associated with electric scooter collisions: A scoping review. Inj. Prev. 2021, 27, 490–499. [Google Scholar] [CrossRef]
- Mitropoulos, L.; Stavropoulou, E.; Tzouras, P.; Karolemeas, C.; Kepaptsoglou, K. E-scooter micromobility systems: Review of attributes and impacts. Transp. Res. Interdiscip. Perspect. 2023, 21, 100888. [Google Scholar] [CrossRef]
- Kumar, S.; Lee, P.; Zagales, R.; Yates, Z.; Haddadi, M.; Strouse, J.; Zito, T.; Elkbuli, A. A comprehensive review of current trends in e-scooter associated injuries, associated outcomes, and effective interventions: Towards establishing sustainable prevention interventions. Injury 2024, 55, 111967. [Google Scholar] [CrossRef] [PubMed]
- White, E.; Guo, F.; Han, S.; Mollenhauer, M.; Broaddus, A.; Sweeney, T.; Robinson, S.; Novotny, A.; Buehler, R. What factors contribute to e-scooter crashes: A first look using a naturalistic riding approach. J. Saf. Res. 2023, 85, 182–191. [Google Scholar] [CrossRef] [PubMed]
- Niemann, M.; Braun, K.F.; Otto, E.; Tiefenbrunner, M.; Wüster, J.; Stöckle, U.; Ahmad, S.S.; Märdian, S.; Graef, F. Dangers of e-mobility: A systematic review and meta-analysis of sustained injury patterns and injury severity. Saf. Sci. 2023, 167, 106283. [Google Scholar] [CrossRef]
- Gulino, M.S.; Zonfrillo, G.; Damaziak, K.; Vangi, D. Exploring performances of electric micro-mobility vehicles and behavioural patterns of riders for in-depth accident analysis. Designs 2021, 5, 66. [Google Scholar] [CrossRef]
- Siebert, F.W.; Ringhand, M.; Englert, F.; Hoffknecht, M.; Edwards, T.; Rötting, M. Braking bad—Ergonomic design and implications for the safe use of shared e-scooters. Saf. Sci. 2021, 140, 105294. [Google Scholar] [CrossRef]
- Gulino, M.S.; Laschi, M.; Zonfrillo, G.; Fabbri, M.; Garcia, E.; Miklis, P.; Unger, T.; Damaziak, K.; Mazurkiewicz, L.; Sybilski, K.; et al. Development of an innovative microvehicle for urban mobility. Open Res. Eur. 2024, 4, 190. [Google Scholar] [CrossRef]
- Federal Ministry of Justice and Consumer Protection. Regulation on the Participation of Small Electric Vehicles in Road Traffic (Elektrokleinstfahrzeuge-Verordnung—eKFV). Federal Law Gazette BGBl. Part I 2019 No 21. 2019. Available online: https://www.gesetze-im-internet.de/ekfv/index.html (accessed on 21 July 2025).
- Gulino, M.; Papini, S.; Zonfrillo, G.; Miklis, P.; Unger, T.; Vangi, D. Enhancing road safety of PLEVs by novel vehicle concepts: A comprehensive investigation on regulations, accident statistics and perception of riders in Europe. Heliyon 2025, 11, e41129.1–e41129.17. [Google Scholar] [CrossRef]
- Federal Ministry of Justice and Consumer Protection. Road Traffic Licensing Regulations (Straßenverkehrs-Zulassungs-Ordnung StVZO). Available online: https://www.recht.bund.de/bgbl/1/2024/191/VO.html (accessed on 21 July 2025).
- United Nations Economic Commission for Europe (UN/ECE). Regulation No 50—Uniform Provisions Concerning the Approval of Front Position Lamps, Rear Position Lamps, Stop Lamps, Direction Indicators and Rear-Registration-Plate Illuminating Devices for Vehicles of Category L. Official Journal of the European Union L97, 29.3.2014. 2014. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:42014X0329(01) (accessed on 21 July 2025).
- Chombo, P.V.; Laoonual, Y. A review of safety strategies of a li-ion battery. J. Power Sources 2020, 478, 228649. [Google Scholar] [CrossRef]
- Gandoman, F.H.; Jaguemont, J.; Goutam, S.; Gopalakrishnan, R.; Firouz, Y.; Kalogiannis, T.; Omar, N.; Mierlo, J.V. Concept of reliability and safety assessment of lithium-ion batteries in electric vehicles: Basics, progress, and challenges. Appl. Energy 2019, 251, 113343. [Google Scholar] [CrossRef]
- Lozito, G.M.; Intravaia, M.; Corti, F.; Patrizi, G.; Laschi, M.; Ciani, L.; Vangi, D.; Reatti, A. Equivalent circuit modelling of hybrid supercapacitors through experimental spectroscopic measurements. IEEE Access 2024, 12, 78449–78462. [Google Scholar] [CrossRef]
- Corti, F.; Gulino, M.S.; Laschi, M.; Lozito, G.M.; Pugi, L.; Reatti, A.; Vangi, D. Time-domain circuit modelling for hybrid supercapacitors. Energies 2021, 14, 6837. [Google Scholar] [CrossRef]
- Laschi, M.; Corti, F.; Lozito, G.M.; Vangi, D.; Gulino, M.S.; Pugi, L.; Reatti, A. Simulation-based assessment of supercapacitors as enabling technology for fast charging in micromobility. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 890–895. [Google Scholar]
- Patrizi, G.; Corti, F.; Laschi, M.; Vangi, D.; Reatti, A.; Catelani, M.; Ciani, L. Impedance Analysis of Hybrid Supercapacitor using EIS under Temperature and SOC Variable Conditions. In Proceedings of the 2024 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 20–23 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- European Parliament, Council of the European Union. Regulation n. 168/2013—The approval and market surveillance of two- or three-wheel vehicles and quadricycles. Official Journal of the European Union L60, 15.1.2013. 2013. Available online: https://eur-lex.europa.eu/eli/reg/2013/168/oj/eng (accessed on 21 July 2025).
- European Parliament, Council of the European Union. Regulation n. 100/2015—Uniform Provisions Concerning the Approval of Vehicles with Regard to Specific Requirements for the Electric Power Train. Official Journal of the European Union L87, 29.1.2016. 2015. Available online: https://eur-lex.europa.eu/eli/reg/2015/100/oj (accessed on 21 July 2025).
- European Parliament, Council of the European Union. Directive 2006/42/EC—Machinery, and amending Directive 95/16/EC (recast). L157, 17.5.2006. Available online: https://eur-lex.europa.eu/eli/dir/2006/42/oj/eng (accessed on 21 July 2025).
- United Nations Economic Commission for Europe. Regulation N. 10—Uniform Provisions Concerning the Approval of Vehicles with Regard to Electromagnetic Compatibility. Official Journal, L 302, 1–153, [2022/2263]. 2022. Available online: http://data.europa.eu/eli/reg/2022/2263/oj (accessed on 21 July 2025).
- EN 15194:2017+A1:2023; Cycles—Electrically Power Assisted Cycles—EPAC Bicycles. CEN: Brussels, Belgium, 2023.
- Söllner, J. Development of a Simulation Model of E-Scooters for PC-Crash. Diploma Thesis, Hochschule für Technik und Wirtschaft, Dresden, Germany, 2020. [Google Scholar]
- Jung, V.F.; Siemer, B.; Schal, S.; Hoger, T. Elektro-Tretroller (E-Scooter)—rechtliche Grundlagen, Beschleunigungs-, Brems- und Fahrdynamikversuche. In Verkehrsunfall und Fahrzeugtechnik. 2019, pp. 411–418. Available online: https://www.ureko.de/wp/wp-content/uploads/2019/12/VKU-2019.12-S.412-S.418.pdf (accessed on 6 June 2025).
- Novotny, A.; Mollenhauer, M.; White, E. E-Scooter Design: Safety Measures for Next Gen Scooter. VTTI-00-032. 2023. Available online: https://dataverse.vtti.vt.edu/dataset.xhtml?persistentId=doi:10.15787/VTT1/XXSXB4 (accessed on 21 July 2025). [CrossRef]
- Naude, C.; Riahi, E.; Canu, B.; Herbin, L.; Vincent, F.; Serre, T. Braking and acceleration capabilities of e-bicycles, e-scooters and e-monowheels. In Proceedings of the 31st Annual Congress of the European Association for Accident Research (EVU), Limassol, Cyprus, 5–7 October 2023. hal-04504068. [Google Scholar]
- Dozza, M.; Li, T.; Billstein, L.; Svernlöv, C.; Rasch, A. How do different micro-mobility vehicles affect longitudinal control? Results from a field experiment. J. Saf. Res. 2022, 84, 24–32. [Google Scholar] [CrossRef] [PubMed]
- Eyers, V.; Parry, I.; Zaid, M. In-Depth Investigation of E-Scooter Performance; TRL Report N. ACA104; Transport Research Foundation: Wokingham, UK, 2022; Available online: https://www.trl.co.uk/publications/in-depth-investigation-of-e-scooter-performance (accessed on 21 July 2025).
- Posirisuk, P.; Baker, C.; Ghajari, M. Computational prediction of head-ground impact kinematics in e-scooter falls. Accid. Anal. Prev. 2022, 167, 106567. [Google Scholar] [CrossRef]
- Stilwell, G.; Gooch, S.; Lafitte, M. Comparison of e-scooter tire performance using rolling resistance trailer. Proc. Des. Soc. 2024, 4, 1457–1466. [Google Scholar] [CrossRef]
- Paudel, M. An Investigation into the Design for Rideability of Small Wheel Single Track Bicycles and e-Scooters. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar] [CrossRef]
- Paudel, M.; Yap, F.F. Front steering design guidelines formulation for e-scooters considering the influence of sitting and standing riders on self-stability and safety performance. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2551–2567. [Google Scholar] [CrossRef]
- Mingote, M.; Serra, G.F.; Noronha, E.J.; Fernandes, F.A. Flexcork—Sustainable Helmet Designed for Electric Micromobility. Designs 2025, 9, 29. [Google Scholar] [CrossRef]
- EN 17128:2020; Light Motorized Vehicles for the Transportation of Persons and Goods and Related Facilities and Not Subject to Type-Approval for On-Road Use. Personal Light Electric Vehicles (PLEV). Requirements and Test Methods. CEN: Brussels, Belgium, 2020.




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).