
A Safety-Based Approach for the Design of an Innovative Microvehicle

 , , ,
, , , 
Abstract
1. Introduction
2. Comprehensive Overview of Legal and Design Standards for PLEVs
- General vehicle conformation;
- Presence of accessory devices;
- Dynamic and performance characteristics;
- Electrical safety and electromagnetic compatibility;
- Driver’s competence and road behavior;
- Driver’s ability and safety.
2.1. Conformation of the Vehicle
- Overall dimensions:
- –
- Maximum width: 700 mm;
- –
- Maximum height: 1400 mm;
- –
- Maximum length: 2000 mm;
- Maximum empty mass: 55 kg;
- The handlebar or steering of a seated PLEV must be longer than 500 mm (eKFV §1 ).
- The vehicle must have a valid insurance plate and be marked with a vehicle identification number and a factory plate (eKFV §2 ).
2.2. Accessory Devices
2.3. Dynamic and Performance Characteristics
- be able to brake the vehicle to a standstill;
- act up to the maximum speed;
- reach deceleration values of at least 3.5 m/s2;
- achieve a minimum deceleration of 44% of the total braking effect in case of failure of the respective other brake.
2.4. Electrical Safety and Electromagnetic Compatibility
2.5. Driver Competence and Road Behavior
- their normal operation does not harm, unavoidably endanger, obstruct or inconvenience anyone;
- the driver is protected from injury as far as possible, especially in case of accidents;
- severity and consequence of injuries remain as low as possible.
3. Dynamic Behaviour and Performance Analysis of E-Scooters
3.1. Deceleration and Acceleration of E-Scooters
3.2. Safety Devices
3.3. Other Important Features
4. Basis for Vehicle Safety Concept
4.1. Questionnaire
- Most people use PLEVs as a rental model;
- PLEVs are used at all times of the day, but especially in the evening and at night;
- More people use PLEVs in pedestrian areas and on bike paths than on the street;
- Most users of PLEVs do not wear a helmet, which is consistent with other literature sources [48];
- The three most frequently mentioned improvements that would be supported are mandatory helmets, raising the minimum age for riding, and lowering the permitted alcohol limit.
4.2. Synthesis of Expected Features for the Microvehicle Concept
5. Dynamic Behaviour and Performance Analysis of E-Scooters
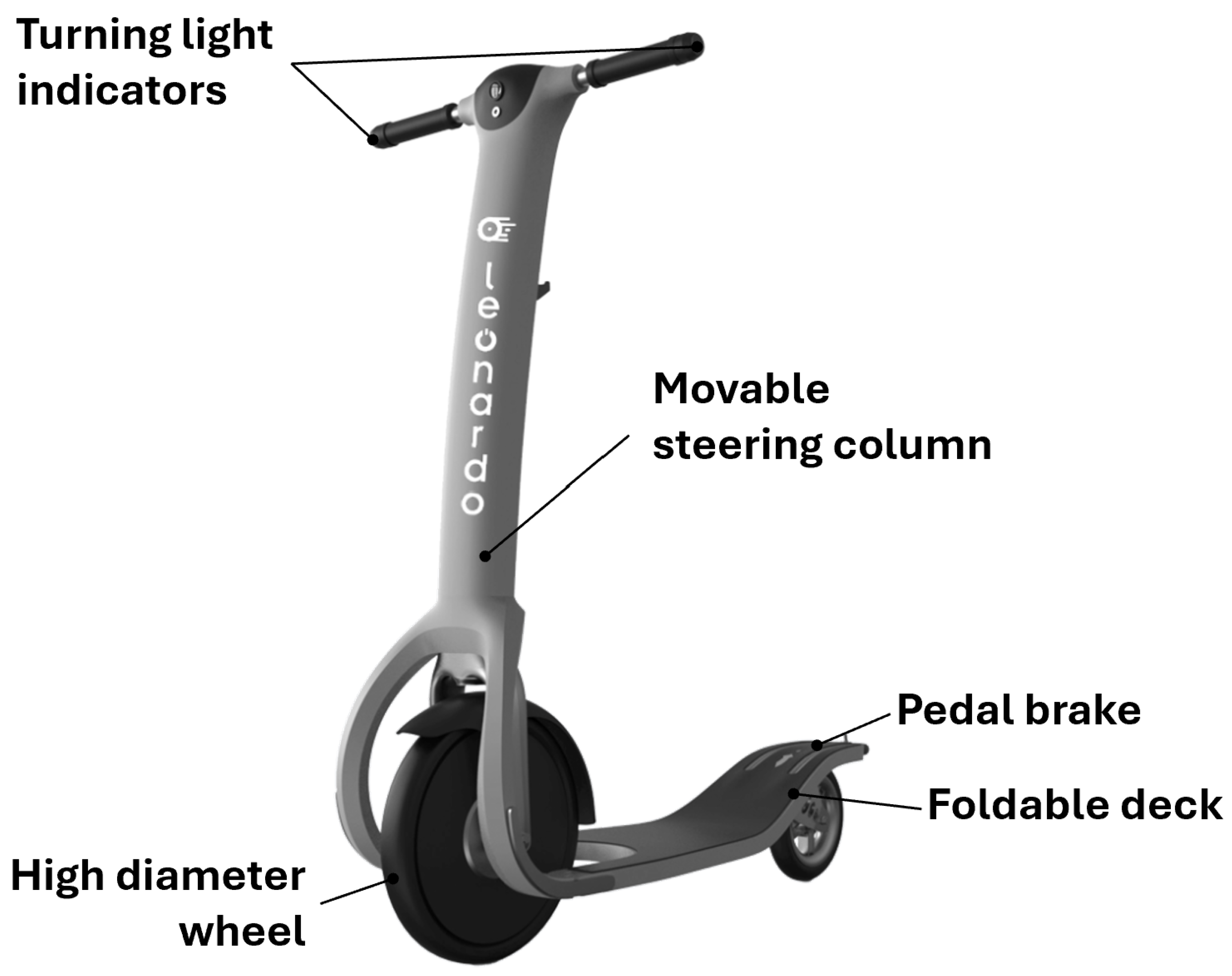
5.1. Prototype Overview: LEONARDO Vehicle
5.2. Wheels
5.3. Speed
- Trolley (TRO)—the electric motor in the front wheel is capable of moving both forward and backward, while the vehicle moves up to 6 km/h; this mode must be employed only when the rider is not on the deck, to enable the user to easily move the vehicle while he/she is walking (e.g., in the middle of a street, a plaza, or a shopping centre).
- Pedestrian (PED)—required by regulation EN 17128 [49] for self-balancing vehicles (and hence by some countries like Italy that apply it directly in their Codes of Circulation), it involves the limitation of speed up to 6 km/h to let the vehicle travel areas where only pedestrians are admitted (like kerbs or pedestrian areas).
- Standard (STD)—dedicated to novice riders, the maximum speed is set to 15 km/h; acceleration and deceleration ramps are soft, but the vehicle cannot travel on roads with a slope higher than 5% (limitation in current, and torque as a consequence).
- Advanced (ADV)—this mode uses the full potential of the electric motor, and the maximum speed is set to 20 km/h. Roads with a slope up to 15% can be travelled.
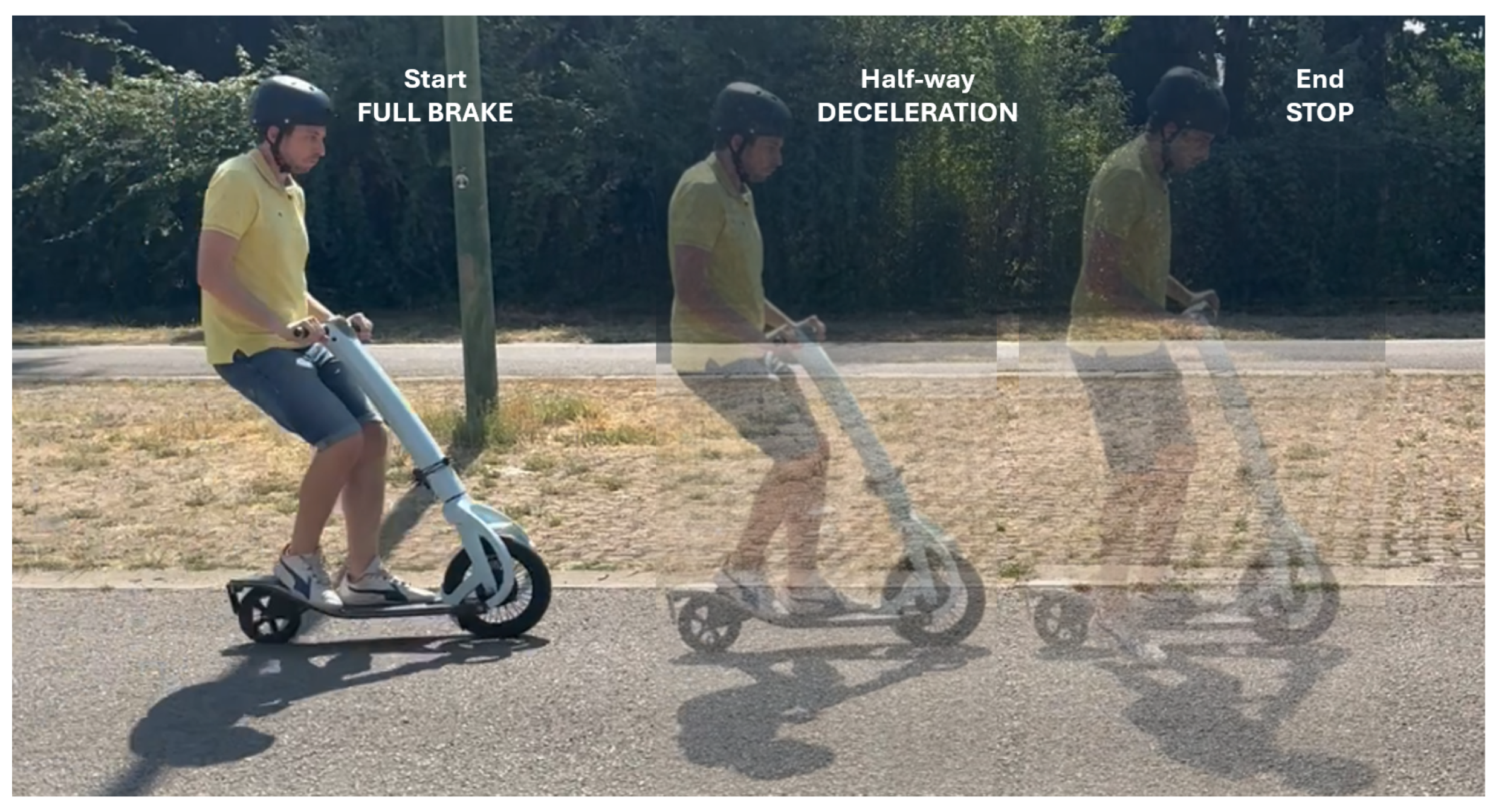
5.4. Braking System
5.5. Acceleration
5.6. Lights and Electronic Devices
5.7. Additional Features for Compliance with Local Circulation Rules
- not enough space is available onboard for an additional person during the ride;
- because of the continuous adjustments by the driver, the vehicle would be unstable and impossible to ride with an additional person, even at a slow speed.
6. Limitations
7. Conclusions
- Wheels—a 14″ motorized wheel with high torque for the front (with a higher diameter compared with typical e-scooters) and 8.5″ for the rear, both with air tires to increase the riding comfort;
- Speed—four different setups for different use and rider experience levels have been introduced: TRO up to 6 km/h (the vehicle functions as a trolley, for use when walking), PED up to 6 km/h (for use in pedestrian areas during the ride), STD up to 15 km/h, ADV up to 20 km/h;
- Braking system—two brakes, one electrical and another mechanical (pedal), to reach up to 3.5 m/s2 of deceleration, which is analogous to other e-scooters and higher than the prescribed minimum in European regulations;
- Acceleration—smooth acceleration reduces the risk of riding instability, with an average value of approximately 0.35 m/s2 (from a standstill);
- Lights and electronic devices—direction indicators on the front let the riders signal their intentions without moving their hands away from the handlebar (this action is critical for stability in self-balancing vehicles);
- Additional features for compliance with local circulation rules—a plate on the rear is installed, since some countries request it for the circulation of these microvehicles.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- García-Vallejo, D.; Schiehlen, W.; García-Agúndez, A. Dynamics, Control and Stability of Motion of Electric Scooters. In Advances in Dynamics of Vehicles on Roads and Tracks. IAVSD 2019; Lecture Notes in Mechanical Engineering; Klomp, M., Bruzelius, F., Nielsen, J., Hillemyr, A., Eds.; Springer: Cham, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Garman, S.; Como, I.C.; Wishart, J.; O’Brien, K.; McLean, S. Micro-Mobility Vehicle Dynamics and Rider Kinematics During Electric Scooter Riding; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Shibayama, T.; Emberger, G. New mobility services: Taxonomy, innovation and the role of ICTs. Transp. Policy 2020, 98, 79–90. [Google Scholar] [CrossRef]
- Hollingsworth, J.; Copeland, B.; Johnson, J. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14, 084031. [Google Scholar] [CrossRef]
- Carrara, E.; Ciavarella, R.; Boglietti, S.; Carra, M.; Maternini, G.; Barabino, B. Identifying and selecting key sustainable parameters for the monitoring of e-powered micro personal mobility vehicles. Evidence from Italy. Sustainability 2021, 13, 9226. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of micro-mobility: Analysis of E-scooter crashes by mining news reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef]
- Goh, Z.W.; Nor, N.H.M. Design of Mobile Scooter to Increase Flexibility and User Friendliness. Res. Prog. Mech. Manuf. Eng. 2022, 3, 988–997. [Google Scholar]
- Bozzi, A.; Aguilera, A. Shared E-Scooters: A Review of Uses, Health and Environmental Impacts, and Policy Implications of a New Micro-Mobility Service. Sustainability 2021, 13, 8676. [Google Scholar] [CrossRef]
- Kjærup, M.; Skov, M.; van Berkel, N. E-Scooter Sustainability—A Clash of Needs, Perspectives, and Experiences. In Human-Computer Interaction—INTERACT 2021; Lecture Notes in Computer Science; Ardito, C.E.A., Ed.; Springer: Cham, The Netherlands, 2021; Volume 12934, pp. 421–440. [Google Scholar] [CrossRef]
- Milakis, D.; Gebhardt, L.; Ehebrecht, D.; Lenz, B. Is micro-mobility sustainable? An overview of implications for accessibility, air pollution, safety, physical activity and subjective wellbeing. In Handbook of Sustainable Transport; Finger, M., Audouin, M., Eds.; Edward Elgar Publishing: Cheltenham, UK, 2020; pp. 180–189. [Google Scholar] [CrossRef]
- James, O.; Swiderski, J.; Hicks, J.; Teoman, D.; Buehler, R. Pedestrians and E-Scooters: An Initial Look at E-Scooter Parking and Perceptions by Riders and Non-Riders. Sustainability 2019, 11, 5591. [Google Scholar] [CrossRef]
- Sarı, C.; Dal, N. The sharing economy business model of e-scooters in the context of sustainable transportation. Dicle Üniversitesi İktisadi İdari Bilim. Fakültesi Derg. 2025, 15, 497–525. [Google Scholar] [CrossRef]
- Aizpuru, M.; Farley, K.X.; Rojas, J.C.; Crawford, R.S.; Moore, T.J., Jr.; Wagner, E.R. Motorized scooter injuries in the era of scooter-shares: A review of the national electronic surveillance system. Am. J. Emerg. Med. 2019, 37, 1133–1138. [Google Scholar] [CrossRef]
- Trivedi, T.K.; Liu, C.; Antonio, A.L.M.; Wheaton, N.; Kreger, V.; Yap, A.; Schriger, D.; Elmore, J.G. Injuries associated with standing electric scooter use. JAMA Netw. Open 2019, 2, e187381. [Google Scholar] [CrossRef]
- Toofany, M.; Mohsenian, S.; Shum, L.K.; Chan, H.; Brubacher, J.R. Injury patterns and circumstances associated with electric scooter collisions: A scoping review. Inj. Prev. 2021, 27, 490–499. [Google Scholar] [CrossRef]
- Mitropoulos, L.; Stavropoulou, E.; Tzouras, P.; Karolemeas, C.; Kepaptsoglou, K. E-scooter micromobility systems: Review of attributes and impacts. Transp. Res. Interdiscip. Perspect. 2023, 21, 100888. [Google Scholar] [CrossRef]
- Kumar, S.; Lee, P.; Zagales, R.; Yates, Z.; Haddadi, M.; Strouse, J.; Zito, T.; Elkbuli, A. A comprehensive review of current trends in e-scooter associated injuries, associated outcomes, and effective interventions: Towards establishing sustainable prevention interventions. Injury 2024, 55, 111967. [Google Scholar] [CrossRef] [PubMed]
- White, E.; Guo, F.; Han, S.; Mollenhauer, M.; Broaddus, A.; Sweeney, T.; Robinson, S.; Novotny, A.; Buehler, R. What factors contribute to e-scooter crashes: A first look using a naturalistic riding approach. J. Saf. Res. 2023, 85, 182–191. [Google Scholar] [CrossRef] [PubMed]
- Niemann, M.; Braun, K.F.; Otto, E.; Tiefenbrunner, M.; Wüster, J.; Stöckle, U.; Ahmad, S.S.; Märdian, S.; Graef, F. Dangers of e-mobility: A systematic review and meta-analysis of sustained injury patterns and injury severity. Saf. Sci. 2023, 167, 106283. [Google Scholar] [CrossRef]
- Gulino, M.S.; Zonfrillo, G.; Damaziak, K.; Vangi, D. Exploring performances of electric micro-mobility vehicles and behavioural patterns of riders for in-depth accident analysis. Designs 2021, 5, 66. [Google Scholar] [CrossRef]
- Siebert, F.W.; Ringhand, M.; Englert, F.; Hoffknecht, M.; Edwards, T.; Rötting, M. Braking bad—Ergonomic design and implications for the safe use of shared e-scooters. Saf. Sci. 2021, 140, 105294. [Google Scholar] [CrossRef]
- Gulino, M.S.; Laschi, M.; Zonfrillo, G.; Fabbri, M.; Garcia, E.; Miklis, P.; Unger, T.; Damaziak, K.; Mazurkiewicz, L.; Sybilski, K.; et al. Development of an innovative microvehicle for urban mobility. Open Res. Eur. 2024, 4, 190. [Google Scholar] [CrossRef]
- Federal Ministry of Justice and Consumer Protection. Regulation on the Participation of Small Electric Vehicles in Road Traffic (Elektrokleinstfahrzeuge-Verordnung—eKFV). Federal Law Gazette BGBl. Part I 2019 No 21. 2019. Available online: https://www.gesetze-im-internet.de/ekfv/index.html (accessed on 21 July 2025).
- Gulino, M.; Papini, S.; Zonfrillo, G.; Miklis, P.; Unger, T.; Vangi, D. Enhancing road safety of PLEVs by novel vehicle concepts: A comprehensive investigation on regulations, accident statistics and perception of riders in Europe. Heliyon 2025, 11, e41129.1–e41129.17. [Google Scholar] [CrossRef]
- Federal Ministry of Justice and Consumer Protection. Road Traffic Licensing Regulations (Straßenverkehrs-Zulassungs-Ordnung StVZO). Available online: https://www.recht.bund.de/bgbl/1/2024/191/VO.html (accessed on 21 July 2025).
- United Nations Economic Commission for Europe (UN/ECE). Regulation No 50—Uniform Provisions Concerning the Approval of Front Position Lamps, Rear Position Lamps, Stop Lamps, Direction Indicators and Rear-Registration-Plate Illuminating Devices for Vehicles of Category L. Official Journal of the European Union L97, 29.3.2014. 2014. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:42014X0329(01) (accessed on 21 July 2025).
- Chombo, P.V.; Laoonual, Y. A review of safety strategies of a li-ion battery. J. Power Sources 2020, 478, 228649. [Google Scholar] [CrossRef]
- Gandoman, F.H.; Jaguemont, J.; Goutam, S.; Gopalakrishnan, R.; Firouz, Y.; Kalogiannis, T.; Omar, N.; Mierlo, J.V. Concept of reliability and safety assessment of lithium-ion batteries in electric vehicles: Basics, progress, and challenges. Appl. Energy 2019, 251, 113343. [Google Scholar] [CrossRef]
- Lozito, G.M.; Intravaia, M.; Corti, F.; Patrizi, G.; Laschi, M.; Ciani, L.; Vangi, D.; Reatti, A. Equivalent circuit modelling of hybrid supercapacitors through experimental spectroscopic measurements. IEEE Access 2024, 12, 78449–78462. [Google Scholar] [CrossRef]
- Corti, F.; Gulino, M.S.; Laschi, M.; Lozito, G.M.; Pugi, L.; Reatti, A.; Vangi, D. Time-domain circuit modelling for hybrid supercapacitors. Energies 2021, 14, 6837. [Google Scholar] [CrossRef]
- Laschi, M.; Corti, F.; Lozito, G.M.; Vangi, D.; Gulino, M.S.; Pugi, L.; Reatti, A. Simulation-based assessment of supercapacitors as enabling technology for fast charging in micromobility. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 890–895. [Google Scholar]
- Patrizi, G.; Corti, F.; Laschi, M.; Vangi, D.; Reatti, A.; Catelani, M.; Ciani, L. Impedance Analysis of Hybrid Supercapacitor using EIS under Temperature and SOC Variable Conditions. In Proceedings of the 2024 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 20–23 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. [Google Scholar]
- European Parliament, Council of the European Union. Regulation n. 168/2013—The approval and market surveillance of two- or three-wheel vehicles and quadricycles. Official Journal of the European Union L60, 15.1.2013. 2013. Available online: https://eur-lex.europa.eu/eli/reg/2013/168/oj/eng (accessed on 21 July 2025).
- European Parliament, Council of the European Union. Regulation n. 100/2015—Uniform Provisions Concerning the Approval of Vehicles with Regard to Specific Requirements for the Electric Power Train. Official Journal of the European Union L87, 29.1.2016. 2015. Available online: https://eur-lex.europa.eu/eli/reg/2015/100/oj (accessed on 21 July 2025).
- European Parliament, Council of the European Union. Directive 2006/42/EC—Machinery, and amending Directive 95/16/EC (recast). L157, 17.5.2006. Available online: https://eur-lex.europa.eu/eli/dir/2006/42/oj/eng (accessed on 21 July 2025).
- United Nations Economic Commission for Europe. Regulation N. 10—Uniform Provisions Concerning the Approval of Vehicles with Regard to Electromagnetic Compatibility. Official Journal, L 302, 1–153, [2022/2263]. 2022. Available online: http://data.europa.eu/eli/reg/2022/2263/oj (accessed on 21 July 2025).
- EN 15194:2017+A1:2023; Cycles—Electrically Power Assisted Cycles—EPAC Bicycles. CEN: Brussels, Belgium, 2023.
- Söllner, J. Development of a Simulation Model of E-Scooters for PC-Crash. Diploma Thesis, Hochschule für Technik und Wirtschaft, Dresden, Germany, 2020. [Google Scholar]
- Jung, V.F.; Siemer, B.; Schal, S.; Hoger, T. Elektro-Tretroller (E-Scooter)—rechtliche Grundlagen, Beschleunigungs-, Brems- und Fahrdynamikversuche. In Verkehrsunfall und Fahrzeugtechnik. 2019, pp. 411–418. Available online: https://www.ureko.de/wp/wp-content/uploads/2019/12/VKU-2019.12-S.412-S.418.pdf (accessed on 6 June 2025).
- Novotny, A.; Mollenhauer, M.; White, E. E-Scooter Design: Safety Measures for Next Gen Scooter. VTTI-00-032. 2023. Available online: https://dataverse.vtti.vt.edu/dataset.xhtml?persistentId=doi:10.15787/VTT1/XXSXB4 (accessed on 21 July 2025). [CrossRef]
- Naude, C.; Riahi, E.; Canu, B.; Herbin, L.; Vincent, F.; Serre, T. Braking and acceleration capabilities of e-bicycles, e-scooters and e-monowheels. In Proceedings of the 31st Annual Congress of the European Association for Accident Research (EVU), Limassol, Cyprus, 5–7 October 2023. hal-04504068. [Google Scholar]
- Dozza, M.; Li, T.; Billstein, L.; Svernlöv, C.; Rasch, A. How do different micro-mobility vehicles affect longitudinal control? Results from a field experiment. J. Saf. Res. 2022, 84, 24–32. [Google Scholar] [CrossRef] [PubMed]
- Eyers, V.; Parry, I.; Zaid, M. In-Depth Investigation of E-Scooter Performance; TRL Report N. ACA104; Transport Research Foundation: Wokingham, UK, 2022; Available online: https://www.trl.co.uk/publications/in-depth-investigation-of-e-scooter-performance (accessed on 21 July 2025).
- Posirisuk, P.; Baker, C.; Ghajari, M. Computational prediction of head-ground impact kinematics in e-scooter falls. Accid. Anal. Prev. 2022, 167, 106567. [Google Scholar] [CrossRef]
- Stilwell, G.; Gooch, S.; Lafitte, M. Comparison of e-scooter tire performance using rolling resistance trailer. Proc. Des. Soc. 2024, 4, 1457–1466. [Google Scholar] [CrossRef]
- Paudel, M. An Investigation into the Design for Rideability of Small Wheel Single Track Bicycles and e-Scooters. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar] [CrossRef]
- Paudel, M.; Yap, F.F. Front steering design guidelines formulation for e-scooters considering the influence of sitting and standing riders on self-stability and safety performance. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2551–2567. [Google Scholar] [CrossRef]
- Mingote, M.; Serra, G.F.; Noronha, E.J.; Fernandes, F.A. Flexcork—Sustainable Helmet Designed for Electric Micromobility. Designs 2025, 9, 29. [Google Scholar] [CrossRef]
- EN 17128:2020; Light Motorized Vehicles for the Transportation of Persons and Goods and Related Facilities and Not Subject to Type-Approval for On-Road Use. Personal Light Electric Vehicles (PLEV). Requirements and Test Methods. CEN: Brussels, Belgium, 2020.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Model | Brake System | Maximum Deceleration (m/s2) | Mean Deceleration (m/s2) | Distance to Stop (m) | Mass (kg) |
|---|---|---|---|---|---|---|
| [39] | Bird One Germany | Front and rear drum brakes | 6.06 | - | - | 18 |
| [39] | Circ B1D | Front drum brake | 6.70 | - | - | 20 |
| [39] | Hiboy A1 | Rear drum brake | 4.15 | - | - | 13 |
| [39] | Lime-S 3.0 | Rear drum brake, rear foot brake | 4.13 | - | - | 25 |
| [39] | Tier ES200G | Front and rear drum brakes | 5.14 | - | - | 23 |
| [39] | Voi Voiager 1 | Rear drum brake, rear foot brake | 3.12 | - | - | 19 |
| [38] | Lime Xiaomi M365 | Front electric brake, rear drum brake | 5.07 | 3.89 | - | 22.6 |
| [38] | Tier Ninebot ES2 | Front drum brake, rear foot brake | 5.27 | 4.10 | - | 27.8 |
| [38] | Metz Moover | Front and rear disc brakes | 7.35 | 5.42 | - | 34 |
| [40] | Segway Nineboot Max 2.0 seat | Front drum brake, rear anti-lock electronic brake | - | 2.78 | 8.42 | 28.1 |
| [40] | Segway Nineboot Max 2.3 | Front drum brake, rear foot brake | - | 2.67 | 8.63 | 14.5 |
| [40] | Okay ES400B | Front drum brake, rear anti-lock electronic brake | - | 2.88 | 8.10 | 12.5 |
| [40] | Spin S-100T | Front drum brake, rear anti-lock electronic brake | - | 2.84 | 8.35 | - |
| [41] | Xiaomi Mi scooter Pro | Front electric brake, rear disc brake | 7.40 | 3.77 | 5.20 | 12.8 |
| [42] | Ninebot ES2 | Front electric brake, rear foot brake | - | 2.22 | 4.50 | 10 |
| [43] | Various e-scooters | Disc brakes | - | 3.42 | - | - |
| [43] | Various e-scooters | Drum brakes | - | 3.39 | - | - |
| [43] | Various e-scooters | Foot brake | - | 3.84 | - | - |
| [2] | Commercial e-scooter | Front electric brake, rear disc brake | - | - | 3.30 | - |
| This work | Leonardo vehicle | Front electric brake, rear foot brake | 5.07 | 3.55 | 4.20 | 10 |
| Road Condition | Decline (m) | Flat (m) | Incline (m) |
|---|---|---|---|
| Wet Pavement | 7.02 | 5.71 | 3.80 |
| Off Road | 6.68 | 5.88 | 3.98 |
| Pavement | 4.54 | 2.40 | 1.72 |
| Vehicle | Acceleration (m/s2) |
|---|---|
| E-scooter 250 W | 2.664 |
| E-scooter 300 W | 2.494 |
| E-scooter 350 W | 2.425 |
| E-scooter 500 W | 4.625 |
| Slow pedelecs | 1.00 |
| Fast pedelecs | 1.50 |
| Bicycles | 0.85 |
| PLEVs (average) | 1.25 |
| Mopeds/light motorcycles | 1.75 |
| Passenger car | 1.75 |
| Vehicle Feature | Design Specification | Functional Purpose |
|---|---|---|
| Maximum speed | 20 km/h | To avoid dynamic instability and oscillation |
| Braking system |
| Safe and stable stopping performance |
| Wheels |
| Accelerometer-based stabilisation and comfort on rough terrain |
| Chassis design |
| Obstacle clearance and directional stability |
| Safety equipment |
| Compliance and visibility |
| User access control | Minimum age or license | Responsible use and misuse prevention |
| Regulatory compliance | German small vehicle regulation | Road-legal operation |
| Test | Motor Brake Only (m/s2) | Motor Brake + Pedal Brake (m/s2) | Acceleration (m/s2) |
|---|---|---|---|
| Test 1 | 3.16 | 3.55 | 0.323 |
| Test 2 | 2.95 | 3.42 | 0.368 |
| Test 3 | 3.26 | 3.65 | 0.341 |
| Test 4 | 3.03 | 3.46 | 0.356 |
| Test 5 | 3.22 | 3.60 | 0.389 |
| Mean | 3.12 | 3.54 | 0.355 |
| Std. Dev. | 0.13 | 0.096 | 0.025 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gulino, M.-S.; Papini, S.; Zonfrillo, G.; Unger, T.; Miklis, P.; Vangi, D. A Safety-Based Approach for the Design of an Innovative Microvehicle. Designs 2025, 9, 90. https://doi.org/10.3390/designs9040090
Gulino M-S, Papini S, Zonfrillo G, Unger T, Miklis P, Vangi D. A Safety-Based Approach for the Design of an Innovative Microvehicle. Designs. 2025; 9(4):90. https://doi.org/10.3390/designs9040090
Chicago/Turabian StyleGulino, Michelangelo-Santo, Susanna Papini, Giovanni Zonfrillo, Thomas Unger, Peter Miklis, and Dario Vangi. 2025. "A Safety-Based Approach for the Design of an Innovative Microvehicle" Designs 9, no. 4: 90. https://doi.org/10.3390/designs9040090
APA StyleGulino, M.-S., Papini, S., Zonfrillo, G., Unger, T., Miklis, P., & Vangi, D. (2025). A Safety-Based Approach for the Design of an Innovative Microvehicle. Designs, 9(4), 90. https://doi.org/10.3390/designs9040090