Abstract
The emergence of low-cost GNSS hardware and affordable RTK correction services has made high-precision positioning more accessible. While prior studies have investigated RTK capabilities using smartphones, most rely on professional geodetic infrastructures. This study shifts the focus toward evaluating smartphone-based RTK positioning within low-cost GNSS networks and comparing the performance against traditional geodetic network setups. The research investigates two main configurations: (1) a smartphone functioning as an RTK rover within a low-cost GNSS network, using a low-cost base station and publicly available or inexpensive correction services, and (2) the same smartphone setup operating within a traditional geodetic network with high-grade base stations. The study aims to assess the viability of smartphones as RTK rovers in low cost networks, exploring metrics such as horizontal and vertical positioning accuracy, fix reliability, initialization time, and system responsiveness. Preliminary findings suggest that smartphones integrated with low-cost GNSS receivers can deliver sub-meter accuracy under favorable conditions, though some trade-offs are noted when compared with geodetic-grade infrastructure. The study emphasizes the potential of cost-effective RTK configurations for practical applications where high precision is required. By comparing performance across traditional and low-cost network configurations, this research demonstrates the increasing potential of using smartphones and low-cost GNSS systems to make high-precision positioning more accessible.
1. Introduction
The rapid evolution of Global Navigation Satellite System (GNSS) technology has transformed the landscape of precision positioning, with advances in low-cost hardware and affordable Real-Time Kinematic (RTK) correction services making high-accuracy positioning increasingly accessible for diverse applications. RTK positioning, which traditionally required expensive professional-grade equipment and geodetic infrastructure such as as the International GNSS Service (IGS) [1] and the EUREF Permanent Network (EPN) [2], now presents opportunities for democratization through emerging technologies. The mass market GNSS receiver domain has already proven to achieve similar performances to their geodetic counterparts in many applications [3]. Nowadays, the convergence of smartphone GNSS capabilities and progress in research and development of its ultra-low cost GNSS hardware [4] and positioning algorithms [5] allow further possibilities to achieve centimeter-level accuracy without substantial financial investments.
Despite these technological advances, significant barriers continue to limit widespread adoption of high-precision positioning systems. Traditional RTK implementations rely heavily on expensive geodetic infrastructure, including high-grade reference stations and professional correction services that can cost thousands of euros annually [6]. This economic barrier has restricted access to precision positioning primarily to specialized industries such as surveying, construction, and precision agriculture, leaving many potential applications under-served [7]. The growing demand for accurate positioning in emerging fields like autonomous systems, urban mapping, and location-based services highlights the critical need for more accessible and cost-effective alternatives to conventional geodetic-grade solutions.
Existing research has demonstrated the potential of smartphones GNSS performance with RTK, with several studies successfully achieving sub-meter to centimeter-level accuracy using mobile devices [8]. However, the majority of these investigations have focused on smartphone performance within traditional geodetic network configurations, utilizing professional-grade base stations and established correction services. Static Precise Point Positioning (PPP) approaches to smartphones have achieved sub-meter accuracies [9], but real time performances are desired. While these studies provide valuable insights into smartphone GNSS capabilities, they do not address the fundamental accessibility challenge posed by expensive infrastructure requirements. A significant research gap exists in understanding how smartphones perform as RTK rovers within entirely low-cost network configurations, where both the base stations and correction services prioritize affordability over traditional geodetic standards. The significance of this research lies in its potential to democratize high-precision positioning technology, making it accessible to a broader range of users and applications. By investigating smartphone-based RTK positioning within low-cost GNSS networks, this study addresses the critical need for affordable precision positioning solutions which improves accessibility as well.
The research objectives center on comparing smartphone RTK and Network-RTK (NRTK) performance across two distinct configurations: operation within low-cost networks using affordable base stations and correction services, versus traditional geodetic network setups with high-grade infrastructure. Performance of a hybrid low-cost and geodetic network is also discussed. By directly comparing low-cost and geodetic-grade network performance using identical smartphone hardware, this research provides critical evidence for the viability of cost-effective RTK solutions. The findings contribute to the growing body of knowledge supporting the accessibility of high-precision positioning technology, potentially enabling new applications and expanding the user base for RTK positioning systems beyond traditional professional markets.
2. Materials and Methods
In RTK positioning, correction data is typically transmitted from a continuously operating reference station (CORS) to the rover to enhance its positional accuracy. Generally, one master station—indicated with subscript A in Equations (1) and (2)—is installed at a known location and broadcasts either pseudorange corrections (PRC) or carrier-phase corrections (CPC), depending on the type of measurement used. These corrections are transmitted to the rover receiver via an internet connection or radio modem.
The corrections are calculated as follows:
where:
- represents the geometric range,
- and are the pseudorange and carrier-phase measurements respectively,
- and are the satellite and receiver clock biases (multiplied by the speed of light),
- denotes the ionospheric delay with a known frequency-dependent coefficient ,
- is the tropospheric delay,
- includes multipath and ephemeris errors,
- is the carrier-phase ambiguity term.
These correction values are then applied by the rover receiver (denoted as B) using the following equations:
Here, the subscript indicates that the bias values are related to the master-rover station pair.
In this study, two different types of GNSS correction networks were used to evaluate the RTK performance of a smartphone rover: the SPIN3 Network (traditional geodetic network) and the Centipede Network (low-cost GNSS network).
The SPIN3 Network is a public GNSS infrastructure that provides high-precision correction data for Northern Italy, specifically in the regions of Lombardia, Piemonte, and Valle d’Aosta. Designed for geodetic-grade RTK applications, SPIN3 offers real-time centimeter-level positioning accuracy (Figure 1). It supports NRTK techniques, including Virtual Reference Station (VRS) and other network correction products, ensuring robust and accurate positioning capabilities.
Figure 1.
Coverage of the SPIN3 Network in Northern Italy (https://www.spingnss.it/stazioni/, accessed on 24 May 2025).
The Centipede Network represents a new generation of GNSS networks that use low-cost GNSS receivers and provide open-source correction services. This network is composed of approximately 700 GNSS CORSs established by public institutions, individual users, and commercial operators worldwide (Figure 2). The density of GNSS stations varies due to the volunteer-based nature of the network, leading to incomplete geographic coverage. A recent study evaluated the performance of Centipede CORS in a comparative analysis, confirming both the potential and the limitations of this community-driven infrastructure [10]. Most of the stations are located in France, with some coverage extending into other countries. The project is financially supported by the Institut national de la recherche agronomique (INRAE) and has benefited from contributions by research institutions, government agencies, and private organizations since its launch in 2019.

Figure 2.
Coverage of the Centipede Network (https://map.centipede-rtk.org/, accessed on 24 May 2025).
Unlike the SPIN3 network, which is designed for NRTK and provides advanced correction services such as VRS, the Centipede RTK network supports only single-base RTK positioning. It lacks the infrastructure to deliver network correction products, but it is still possible to utilize differential corrections from individual stations using appropriate credentials for receiving RTCM correction. The characteristics of the COR station in both networks are summarized in Table 1.

Table 1.
Characteristics of CORS Stations in SPIN3 and Centipede Networks.
3. Experimental Results
Several field tests were conducted using a smartphone configured as an RTK rover within two distinct GNSS network infrastructures: the SPIN3 network, a traditional geodetic-grade system, and the Centipede network, representing a low-cost, community-driven alternative. Figure 3 illustrates the noisy behavior and larger mean RTK positioning error observed when the smartphone rover operated within the Centipede network. In contrast, Figure 4 presents the corresponding RTK results obtained in the SPIN3 network, showing significantly more stable and precise positioning performance. RTK positioning was performed using the open-source software RTKLIB developed by Takasu and Yasuda [11]. As previously noted, unlike the SPIN3 network, the Centipede network is not designed for Network RTK (NRTK) and does not provide advanced correction formats such as Virtual Reference Station (VRS). In this experiment, the nearest Centipede base station was located approximately 83 km from the observation point. RTCM corrections were accessed from this single base, which introduces significant baseline-dependent errors, contributing to the degraded accuracy. An important observation is that the percentage of fixed ambiguity solutions was paradoxically higher in the Centipede-based results (17.8%) compared to the SPIN3-based results (2.9%). However, these fixes were unreliable and are better described as “false fixes.” This phenomenon occurs when the RTK algorithm incorrectly resolves carrier-phase ambiguities despite the poor quality of the raw measurements, which lack the precision required for valid ambiguity resolution, as described in [12]. A quantitative summary of the positioning error statistics for each ENU component across both networks is presented in Table 2.
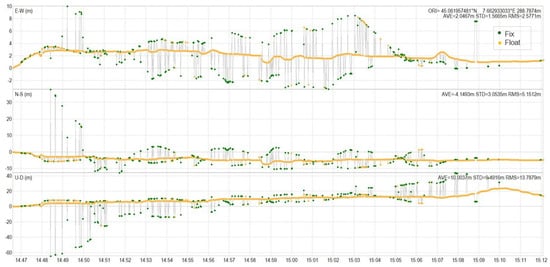
Figure 3.
RTK positioning performance using smartphone rover within Centipede (low-cost) network.

Figure 4.
RTK positioning performance using smartphone rover within SPIN3 (geodetic-grade) network.
Table 2.
Summary of positioning error statistics.
Moreover, the same smartphone-based RTK rover was evaluated within a mixed GNSS network configuration that combined stations from both the Centipede and SPIN3 networks. This hybrid network was established as part of a national research project in collaboration between three academic institutions: Politecnico di Torino, the University of Genova, and the University of Padova. The network consists of a total of seven continuously operating reference stations (CORSs), including four stations sourced from the Centipede network and three stations from the SPIN3 infrastructure. In this setup, a Virtual Reference Station (VRS) technique was employed to provide real-time differential corrections to the rover. The results of the kinematic positioning test carried out within this mixed network configuration are summarized in Table 3.
Table 3.
RTK positioning performance in the mixed Centipede-SPIN3 network.
The results confirm that sub-meter accuracy was achieved in both horizontal and vertical components. As expected, the vertical accuracy was slightly lower due to inherent GNSS limitations, but it remains within a reasonable range for low-cost RTK configurations.
The experimental results demonstrate that the integration of smartphones as RTK rovers with low-cost GNSS receivers can achieve promising levels of positioning accuracy, especially when supported by high-quality differential correction services. Sub-meter accuracy was consistently obtained in favorable conditions, particularly when the network infrastructure enabled VRS or NRTK corrections. However, performance degradation was observed in single-base RTK configurations with long baselines, as seen in the Centipede network tests. These limitations are primarily due to the lack of network-level corrections and the increased error propagation over extended distances. Despite these constraints, the preliminary findings confirm that smartphones, when coupled with reliable correction data and proper GNSS support, are capable of delivering high-accuracy positioning. This suggests significant potential for expanding the use of cost-effective RTK solutions.
4. Conclusions
This study evaluated the performance of RTK positioning using a smartphone as a rover integrated with low-cost GNSS receivers across different GNSS correction network configurations. The results show that under favorable conditions, particularly when reliable differential corrections such as VRS or short-baseline RTCM corrections are available, smartphones integrated with low-cost GNSS receivers can achieve sub-meter level positioning accuracy.
While the performance within low-cost networks like Centipede was limited by factors such as baseline length and lack of network corrections, the results still demonstrate the potential of these configurations for certain practical applications. Tests conducted in more favorable setups, including those with improved correction services, showed significantly better positioning consistency and reliability.
These findings support the feasibility of integrating smartphones with low-cost GNSS devices for high-accuracy positioning, highlighting a promising path toward more accessible and affordable RTK solutions beyond traditional geodetic use cases.
Author Contributions
Conceptualization, M.B. and P.D.; methodology, M.B. and P.D.; software, M.B. and N.G.; validation, M.B. and P.D.; formal analysis, M.B. and N.G.; investigation, M.B.; resources, P.D.; data curation, M.B. and P.D.; writing—original draft preparation, M.B. and N.G.; writing—review and editing, M.B. and P.D.; visualization, M.B.; supervision, P.D.; project administration, P.D.; funding acquisition, P.D. All authors have read and agreed to the published version of the manuscript.
Funding
The research activity has been carried out within the SPACE IT UP! project founded by the Italian Space Agency’s Call for “Space Activities” (topic 15), related to MUR call n°341 of 15 March 2022, for “Partnerships extended to universities, research centers, companies for the financing of basic research projects” (Prot. CI-2022-DSR-042 of 18 July 2022) financed by Decree of Award of the Italian Space Agency n. 53 of 26 January 2024—CUP E53C24000300006. “Earth Observation Fund—Financing from the Presidency of the Council of Ministers pursuant to Art. 1, paragraph 254, of law 160/2019. The reference year 2024”. The authors gratefully acknowledge the financial support obtained.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- International GNSS Service (IGS). Available online: https://igs.org/ (accessed on 30 January 2025).
- EPN Central Bureau. EUREF Permanent Network Central Bureau (EPN CB). Available online: https://www.epncb.oma.be/ (accessed on 24 May 2025).
- Dabove, P.; Manzino, A.M. GPS & GLONASS mass-market receivers: Positioning performances and peculiarities. Sensors 2014, 14, 22159–22179. [Google Scholar] [CrossRef] [PubMed]
- Hamza, V.; Stopar, B.; Sterle, O. Testing the performance of multi-frequency low-cost GNSS receivers and antennas. Sensors 2021, 21, 2029. [Google Scholar] [CrossRef] [PubMed]
- Hamza, V.; Stopar, B.; Sterle, O.; Pavlovčič-Prešeren, P. Observations and positioning quality of low-cost GNSS receivers: A review. GPS Solutions 2024, 28, 149. [Google Scholar] [CrossRef]
- RTK Correction Services in Your Country. Available online: https://www.ardusimple.com/rtk-correction-services-in-your-country/ (accessed on 24 May 2025).
- Perez-Ruiz, M.; Upadhyaya, S.K. GNSS in precision agricultural operations. In New Approach of Indoor and Outdoor Localization Systems; Boukour Elbahhar, F., Rivenq, A., Eds.; IntechOpen: London, UK, 2012; Chapter 1. [Google Scholar] [CrossRef]
- Zangenehnejad, F.; Gao, Y. GNSS smartphones positioning: Advances, challenges, opportunities, and future perspectives. Satell. Navig. 2021, 2, 24. [Google Scholar] [CrossRef] [PubMed]
- Shinghal, G.; Bisnath, S. Conditioning and PPP processing of smartphone GNSS measurements in realistic environments. Satell. Navig. 2021, 2, 10. [Google Scholar] [CrossRef] [PubMed]
- Dabove, P.; Bagheri, M. Enhancing Atmospheric Monitoring Capabilities: A Comparison of Low- and High-Cost GNSS Networks for Tropospheric Estimations. Remote Sens. 2024, 16, 2223. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Seogwipo-si, Republic of Korea, 4–6 November 2009; pp. 1–6. [Google Scholar]
- Dabove, P.; Di Pietra, V. Evaluating the Positioning Accuracy of the Latest Smartphone GNSS Chipset under Challenging Conditions. Sensors 2019, 19, 4302. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.