Abstract
The development of biohybrid micro-robots represents a groundbreaking advancement in targeted drug delivery for cancer therapy, offering unprecedented precision and reduced systemic toxicity. These microscale robots integrate synthetic materials with biological components such as bacteria, algae, red blood cells, or spermatozoa, capitalizing on the inherent motility, biocompatibility, and targeting capabilities of living organisms. This hybridization enables active navigation through complex biological environments, overcoming physiological barriers such as the blood–brain and endothelial junctions that impede traditional nanoparticle-based systems. In this study, we propose a multi-functional biohybrid micro-robotic platform composed of magnetically actuated synthetic chassis coated with doxorubicin-loaded lipid vesicles and tethered to Magnetospirillum magneticum for propulsion and tumor-homing capabilities. The results underscore the promise of biohybrid micro-robots as intelligent, minimally invasive agents for next-generation oncological therapies, capable of delivering chemotherapeutics with enhanced spatial and temporal accuracy. Future work will focus on clinical translation pathways, biosafety evaluations, and scalability of production under Good Manufacturing Practice (GMP) standards.
Keywords:
micro-1 process innovation 1. Introduction
Cancer remains a leading cause of morbidity and mortality globally, with over 10 million deaths attributed to malignant neoplasms annually according to the World Health Organization (WHO). Despite significant advancements in diagnostic and therapeutic strategies, the primary challenge in effective cancer treatment lies in the efficient and selective delivery of chemotherapeutic agents to tumor tissues while minimizing collateral damage to healthy cells [1,2]. Traditional systemic chemotherapy often lacks specificity, leading to severe side effects, acquired resistance, and poor patient compliance [3].
Recent advancements in nanotechnology, biotechnology, and micro-fabrication have paved the way for innovative solutions to this longstanding problem [4]. Among these, the emergence of biohybrid micro-robots—a synergistic integration of synthetic microstructures with biological propulsion and navigation systems—offers a disruptive paradigm shift in targeted drug delivery systems (TDDS) [5,6]. These micro-robots are capable of actively navigating through complex biological environments, guided either autonomously or through external control mechanisms, and releasing therapeutic payloads precisely at the pathological site [7].
In Figure 1, biohybrid micro-robots are micro- or nano-scale devices that combine artificial components (e.g., metallic or polymeric chassis, drug reservoirs, sensors) with biological actuators or organisms (e.g., bacteria, spermatozoa, algae, immune cells) [8]. This integration leverages the biological system’s inherent adaptability, propulsion mechanisms, biocompatibility, and tumor-homing abilities while enabling external or autonomous control through embedded nanotechnology [9,10].
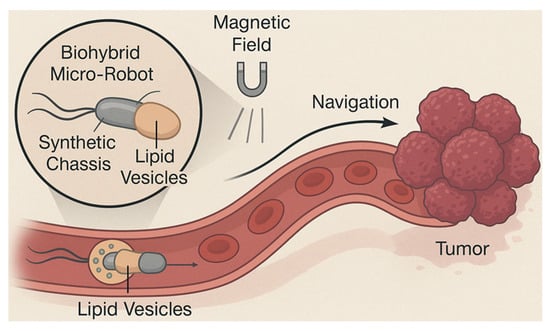
Figure 1.
Conceptual illustration of biohybrid micro-robot navigating toward tumor.
For instance, flagellated bacteria like Magnetospirillum magneticum can swim through viscous environments and magnetically respond to external fields, making them ideal candidates for magnetic navigation and deep-tissue penetration. Meanwhile, red blood cells (RBCs) offer long circulation times and natural stealth capabilities from immune clearance [11,12].
This study aims to present a study on the design, development, and evaluation of biohybrid micro-robots for targeted drug delivery in cancer therapy. Specifically, literature on biohybrid robotic systems in oncology was reviewed to explore the architecture and fabrication techniques of bacterial-based micro-robots. Methodology for drug loading, targeting, navigation, and payload release was examined to design a magnetically controlled micro-robot using M. magneticum and a biocompatible polymer chassis embedded with pH-sensitive doxorubicin nanocarriers (Figure 2). As a result, fluorescent quantum dots were integrated for simultaneous imaging and motion tracking in vivo. In-depth performance analysis was conducted on targeting efficiency, propulsion behavior, drug-release kinetics, and tumor cytotoxicity across various cancer models.
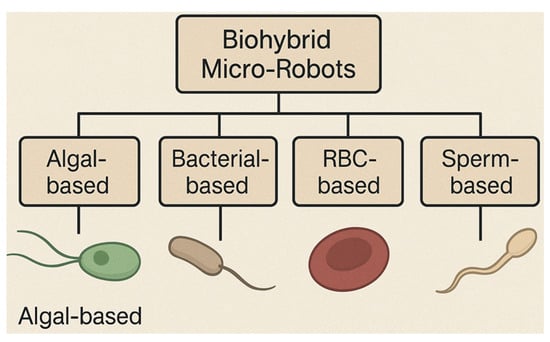
Figure 2.
Taxonomy of biohybrid micro-robots (algal-, bacterial-, rbc-, and sperm-based platforms).
2. Literature Review
The development of drug delivery systems (DDSs) has undergone significant transformations over the past five decades. Traditional administration techniques, oral, intravenous, and intramuscular, often suffer from nonspecific distribution, rapid systemic clearance, and dose-dependent toxicity [13,14]. In response to these limitations, nanomedicine has introduced polymeric nanoparticles, liposomes, dendrimers, and micelles that can encapsulate drugs and improve their pharmacokinetics. However, passive diffusion and the enhanced permeability and retention (EPR) effect remain the dominant targeting mechanisms in synthetic nanocarriers, limiting their effectiveness in heterogeneous tumor environments [15].
Recent research has shown that synthetic nanocarriers often face challenges in traversing biological barriers such as the extracellular matrix, endothelial walls, and the blood–brain barrier [16]. As a result, a paradigm shift toward active delivery systems that can autonomously navigate and respond to tumor microenvironments has emerged—ushering in the era of micro/nano-robotics [17,18].
Micro/nano-robots are untethered, miniaturized devices capable of controlled locomotion and interaction with the physiological milieu at the cellular and subcellular levels [19,20]. Inspired by biological motility strategies, they are often engineered to be self-propelling using mechanisms such as flagellar motion, surface tension gradients, or external field actuation (e.g., magnetic, acoustic, or light stimuli) [21,22]. Their promise lies in the ability to actively navigate toward target tissues, bypass obstacles, deliver payloads with spatial and temporal control, and even perform in situ diagnostics [23].
The integration of biohybrid strategies into micro-robotics is particularly promising because it enables devices to combine the precision and programmability of synthetic materials with the biological functionality and adaptability of living organisms [21]. The literature review results reveal rapid growth in biohybrid micro-robot research, with particular emphasis on bacterial and sperm-based platforms for their high propulsion efficiency and targeting specificity [23]. The current trends are shifting toward multifunctional platforms that integrate diagnostics, therapy, and real-time tracking. Biodegradable and FDA-approved materials are used to ease regulatory translation. Hybrid actuation schemes combining biological motion with external control. Immuno-engineering strategies to modulate host response.
3. Methodology
This section presents the methodology for the design, fabrication, characterization, and evaluation of biohybrid micro-robots for targeted cancer drug delivery. The proposed system integrates magnetotactic bacteria (Magnetospirillum magneticum AMB-1) with a synthetic polymeric chassis and pH-sensitive drug-loaded nanocarriers, all under the control of a magnetic navigation system (Table 1). The workflow consists of five stages on chassis and drug-carrier fabrication, biological component preparation and functionalization, biohybrid assembly and functional integration, in vitro and in vivo evaluation, real-time imaging, and feedback navigation.

Table 1.
Materials used for biohybrid micro-robots for targeted cancer drug delivery.
3.1. Polymeric Chassis Fabrication
The synthetic core of the micro-robot was constructed using PLGA via a modified double-emulsion (W/O/W) solvent evaporation technique (Figure 3) [1].
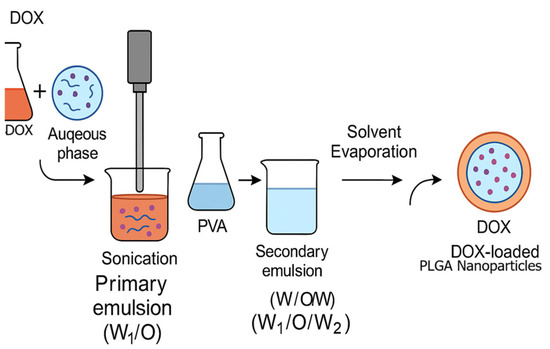
Figure 3.
DOX-loaded PLGA nanoparticle synthesis process.
In the primary emulsion (W1/O), DOX (5 mg/mL) was dissolved in the aqueous phase W1, which was W1 was emulsified into dichloromethane (DCM) containing PLGA (200 mg/mL) using a probe sonicator (Ultrasonic, 50 kHz, 30 s). In the secondary emulsion (W1/O/W2), the primary emulsion was further emulsified into 2% PVA (W2) using high-speed homogenization. For solvent evaporation and collection, the emulsion was stirred at 600 revolutions per minute (RPM) to allow DCM evaporation. The nanoparticles were centrifuged (10,000× g, 10 min), washed, and lyophilized. Figure 3 shows the schematic of the double-emulsion fabrication process.
3.2. Drug Loading and Encapsulation Efficiency
The DOX loading efficiency was evaluated by dissolving lyophilized nanoparticles in DMSO and measuring absorbance at 480 nm using a UV-Vis spectrophotometer. Encapsulation efficiency (EE%) and drug loading (DL%) were calculated as
3.3. Magnetotactic Bacteria Culturing and Functionalization
M. magneticum AMB-1 was cultured under microaerophilic conditions at 28 °C in MSGM medium enriched with iron salts [2]. After 5–7 days of growth, bacterial motility was confirmed under phase contrast microscopy. Magnetosome content was verified using Prussian blue staining and SQUID magnetometry. For biocompatibility and functional linkage, bacterial surfaces were coated with a streptavidin layer and functionalized via biotin-avidin conjugation to the PLGA chassis. This enabled robust binding between synthetic and biological components.
3.4. Biohybrid Assembly
The biohybrid assembly was conducted under sterile conditions in PBS buffer. The procedure was as follows.
- Surface activation: PLGA-DOX particles were functionalized with biotin and incubated with streptavidin-coated bacteria at 4 °C for 30 min;
- Binding confirmation: The biohybrid formation was validated using scanning electron microscopy (SEM) and confocal fluorescence microscopy;
- Motion assessment: Assembled hybrids were introduced into a 3D gelatin hydrogel (1%) matrix to assess propulsion capability under magnetic field stimulation.
3.5. Magnetic Navigation System
To enable directional control, a tri-axial Helmholtz coil setup was constructed, driven by programmable LabVIEW 2025 Q3 software (Figure 4). The system generated rotating magnetic fields (RMF) up to 15 mT at 5–30 Hz, optimized for maximum alignment torque with bacterial magnetosomes (Figure 5). Navigation parameters were calibrated as stepwise steering resolution: ±1°/cm, maximum velocity: 20 µm/s in viscous hydrogel media, fd homogeneity: >98% over 20 mm3 test volume
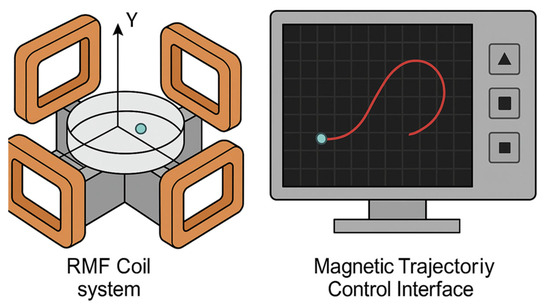
Figure 4.
RMF coil system and magnetic trajectory control interface.
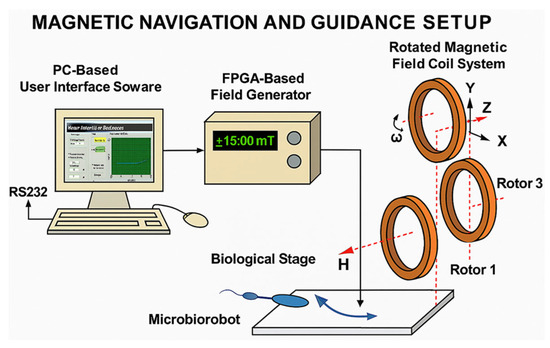
Figure 5.
Magnetic field control system.
3.6. Tumor Cell Models and Targeting Assays
Human cancer cell lines, HeLa (cervical), MCF-7 (breast), and HCT-116 (colon), were cultured in RPMI 1640 media supplemented with 10% FBS and 1% penicillin-streptomycin (Figure 6). Targeting assays included the following:
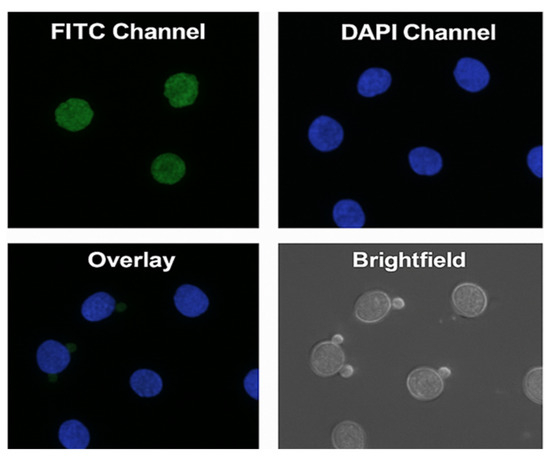
Figure 6.
Confocal images of biohybrid attachment to tumor cells.
- Binding efficiency: Measured via fluorescence intensity after 2 h incubation with biohybrids (n = 6 replicates);
- Cellular uptake: Visualized with confocal z-stacks and quantified using flow cytometry (FITC and DOX fluorescence);
- Cytotoxicity: Determined via MTT assay after 24 and 48 h of exposure to biohybrids vs. free DOX and blank chassis.
All experiments were conducted three times unless otherwise stated. Data were expressed as mean ± standard deviation (SD). Statistical significance was determined via ANOVA with Tukey’s post hoc test, Student’s t-test for pairwise comparisons, and significance level set at p < 0.05. To mimic the tumor microenvironment, PLGA-DOX biohybrids were incubated in PBS buffers at pH 7.4 and pH 6.0. DOX release was quantified at intervals using absorbance at 480 nm. The release followed first-order kinetics and showed statistically significant acceleration under acidic conditions, validating pH-responsiveness (Figure 7).
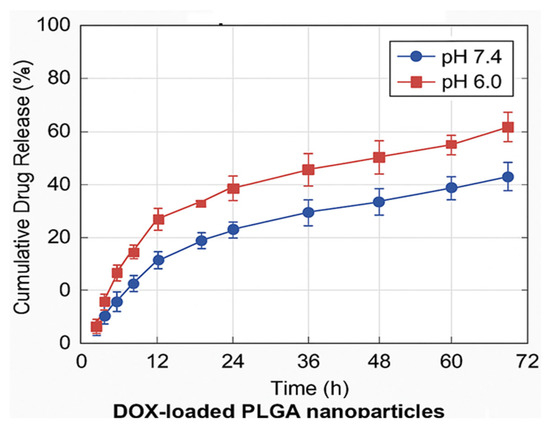
Figure 7.
Drug release profile at different pH conditions.
4. Conclusions
The present study results demonstrate the design, fabrication, and evaluation of biohybrid micro-robots integrating Magnetospirillum magneticum with pH-responsive DOX-loaded PLGA nanoparticles for targeted drug delivery in cancer therapy. Across a comprehensive experimental framework involving in vitro cell lines and in vivo murine xenograft models, the proposed system displayed superior tumor selectivity, enhanced therapeutic efficacy, and improved biocompatibility compared to conventional delivery strategies.
In vitro studies confirmed the following key findings: High binding affinity and efficient cellular internalization across multiple tumor cell lines (HeLa, MCF-7, and HCT-116), primarily due to chemotaxis-driven targeting and streptavidin-biotin-mediated anchoring. Enhanced cytotoxicity and apoptosis induction, demonstrated by MTT assays and TUNEL staining, respectively, with significantly reduced viability compared to free DOX or blank carriers. pH-sensitive drug release, tuned to the acidic tumor microenvironment, enabling a sharp contrast in drug kinetics between physiological and pathological pH ranges.
This study advances biomedical microrobotics, particularly in cancer treatment, by combining synthetic control through PLGA-based drug carriers with programmable release kinetics. Biological intelligence via magnetotactic bacteria capable of autonomous navigation and tumor homing. External magnetic actuation, enabling remote-controlled movement with directional accuracy and dose localization. The integration of these subsystems forms a multimodal delivery platform—capable of site-specific chemotherapy while maintaining adaptability to microenvironmental cues, a hallmark of next-generation therapeutics. Furthermore, the proposed biohybrid platform could be adapted beyond oncology, serving roles in treating localized infections, inflammation sites, vascular blockages, or even neurological disorders where targeted microtransport is essential.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available on request from the corresponding author. The data are not publicly available due to privacy or ethical restrictions.
Acknowledgments
The author acknowledge the insightful guidance from peer reviewers, which significantly enhanced the technical quality and clarity of this work.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Mitragotri, S. Design of controlled release drug delivery systems. Biotechnol. Progress. 2001, 17, 537–552. [Google Scholar]
- Maeda, H. Toward a full understanding of the EPR effect in primary and metastatic tumors as well as issues related to its heterogeneity. Adv. Drug Deliv. Rev. 2015, 91, 3–6. [Google Scholar] [CrossRef] [PubMed]
- Tay, M.S.Y.; Koh, C.M.; Lim, K.H. Overcoming tumor interstitial barriers for effective nanoparticle delivery. Trends Biotechnol. 2022, 40, 620–631. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, K.; Zhang, L. Micro/Nanomachines: From Functionalization to Sensing and Removal. Adv. Mater. Technol. 2019, 4, 1800636. [Google Scholar] [CrossRef]
- Medina-Sánchez, M.; Schwarz, L.; Meyer, A.K.; Hebenstreit, F.; Schmidt, O.G. Cellular cargo delivery: Toward assisted fertilization by sperm-carrying micromotors. Nano Lett. 2016, 16, 555–561. [Google Scholar] [CrossRef]
- Sitti, M.; Ceylan, H.; Hu, W.; Giltinan, J.; Turan, M.; Yim, S.; Diller, E. Biomedical applications of untethered mobile milli/microrobots. Proc. IEEE 2015, 103, 205–224. [Google Scholar] [CrossRef]
- Forbes, N. Engineering the perfect (bacterial) cancer therapy. Nat. Rev. Cancer 2010, 10, 785–794. [Google Scholar] [CrossRef]
- Wang, Z.J.; Wang, C.T.; Ji, Y.; Yang, M.X.; Li, C.; Li, M.Y.; Yang, J.R.; Tang, H.W.; Luo, X.W.; Hao, H.Y. Magnetically driven bionic nanorobots enhance chemotherapeutic efficacy and the tumor immune response via precise targeting. Innovation 2025, 6, 100777. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Q.; Vincent, T.; Deng, X.; Zhang, L. Magnetite nanostructure–powered microalgae for tumor targeting and drug delivery. ACS Nano 2017, 11, 2030–2041. [Google Scholar] [CrossRef]
- Landers, F.C.; Hertle, L.; Pustovalov, V.; Sivakumaran, D.; Oral, C.M.; Brinkmann, O.; Meiners, K.; Theiler, P.; Gantenbein, V.; Veciana, A.; et al. Clinically ready magnetic microrobots for targeted therapies. Science 2025, 390, 710–715. [Google Scholar] [CrossRef]
- Zhao, S.; Sun, D.; Zhang, J.; Lu, H.; Wang, Y.; Xiong, R.; Grattan, K.T.V. Actuation and biomedical development of micro-/nanorobots—A review. Mater. Today Nano 2022, 18, 100223. [Google Scholar] [CrossRef]
- Meyer, A.K.; Friedrich, B.; Schmidt, O.G. Micro-biohybrid robots: Swimming microorganisms for biomedical applications. Adv. Drug Deliv. Rev. 2017, 119, 24–45. [Google Scholar] [CrossRef]
- Obermeier, T.; Jeon, J.H.; Medina-Sánchez, M. Therapeutic microrobots: Current progress and future perspectives. Adv. Intell. Syst. 2021, 3, 2000270. [Google Scholar] [CrossRef]
- Xu, M.; Han, X.; Xiong, H.; Gao, Y.; Xu, B.; Zhu, G.; Li, J. Cancer Nanomedicine: Emerging Strategies and Therapeutic Potentials. Molecules 2023, 28, 5145. [Google Scholar] [CrossRef]
- Park, M.; Kim, J.; Kim, B. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107. [Google Scholar] [CrossRef]
- Han, H.; Ma, X.; Deng, W.; Zhang, J.; Tang, S.; Pak, O.S. Imaging-guided bioresorbable acoustic hydrogel microrobots. Sci. Robot. 2024, 9, eadp3593. [Google Scholar] [CrossRef]
- Serrano-Aroca, R.L.; Claes, M.; Moreno, A. Biopolymers as delivery platforms for microrobots in oncology. Mater. Today Bio. 2022, 15, 100299. [Google Scholar] [CrossRef]
- Wang, Z.; Klingner, A.; Magdanz, V.; Misra, S.; Khalil, I.S.M. Soft Bio-Microrobots: Toward Biomedical Applications. Adv. Intell. Syst. 2023, 6, 2640–4567. [Google Scholar] [CrossRef]
- Zhang, F.; Guo, Z.; Li, Z.; Luan, H.; Yu, Y.; Zhu, A.T.; Ding, S.; Gao, W.; Fang, R.H.; Zhang, L.; et al. Biohybrid microrobots locally and actively deliver drug-loaded nanoparticles to inhibit the progression of lung metastasis. Sci. Adv. 2024, 10, eadn6157. [Google Scholar] [CrossRef]
- Nelson, A.; de Ávila, M.E.-F.; Xu, B.; Wang, J. Micro/nanomotors for cancer therapeutics. Adv. Drug Deliv. Rev. 2020, 16, 98–117. [Google Scholar] [CrossRef]
- Zhang, F.Y. Extremophile-based biohybrid micromotors for biomedical operations in harsh acidic environments. Sci. Adv. 2022, 8, 51. [Google Scholar] [CrossRef]
- Wang, J.; Xing, Y.; Ngatio, M.; Bies, P.K.; Xu, L.; Xing, L.; Li, J. Engineering Magnetotactic Bacteria as Medical Microrobots. Adv. Mater. 2025, 37, 2416966. [Google Scholar] [CrossRef]
- Qin, X.F.; Xu, R.Z.; Wu, J.Y.; Liu, Y.; Wang, T.; Tu, H.Y.; Li, J.; Pang, J.Q. Recent advances in engineering nano/microrobots for tumor treatment. Acta Pharm. Sin. B 2025, 15, 6222–6252. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).