
Switched Observer Design for a Class of Non-Linear Systems


Abstract
1. Introduction
- A non-linear Luenberger-like switched observer with a guaranteed decay rate and cost for the estimation of error dynamics is designed in terms of LMI constraints, considering a class of non-linear systems locally satisfying a Lipschitz condition.
- , , , and represent, respectively, the set of non-negative integer numbers, real numbers, n-dimensional real vectors, and of real matrices;
- represents the subspace of square symmetric matrices;
- For , denotes the transpose of A;
- For , means that P is positive definite (negative definite), and represents the Hermitian operator applied to P;
- The set is the convex hull of ;
- is a vector of the canonical basis of ;
- The set of all vectors , such that , and is designated by ;
- The convex combination of a set of matrices is denoted bywhere ;
- The subset of Metzler matrices denoted consists of all matrices with elements such that and
- is the Euclidean norm in , for every ;
- The set of trajectories with finite energy, i.e., , is denoted by .
- is locally Lipschitz continuous in x, i.e., there exists a constant scalar such thatholds for all .
- for all there exist functionsand constants and , such that ,and
2. System and Observer Description
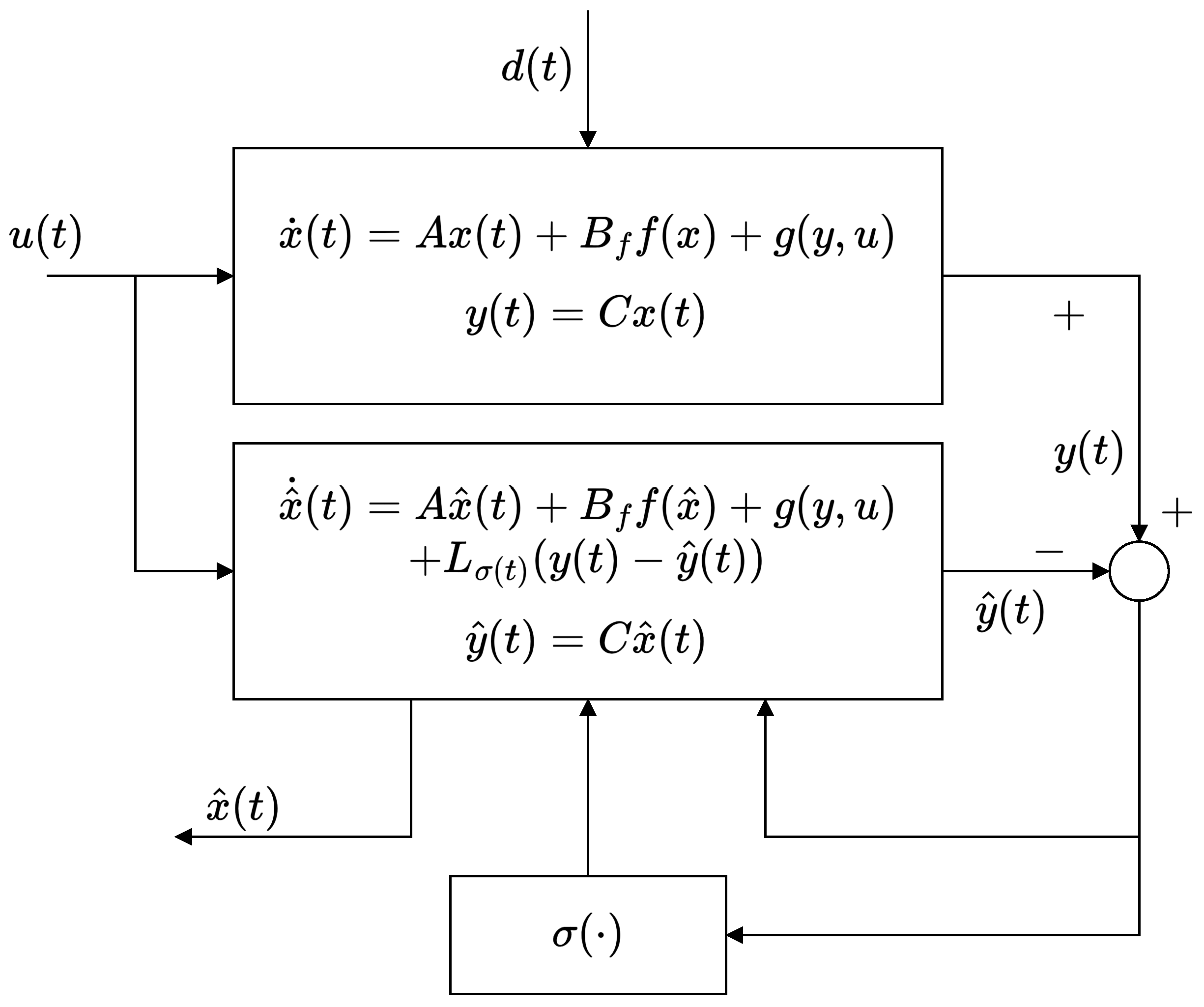
2.1. Switched Luenberger-like Observer
2.2. LPV Formulation
2.3. Minimum-Type Switching Rule
3. Switched Observer Design
3.1. Guaranteed Decay Rate
3.2. Guaranteed Cost
3.3. Stability Regions
3.4. Limited Observer Gain Norm
| Algorithm 1: Switched Observer Design with Guaranteed Stability Region |
|
4. Simulation Results
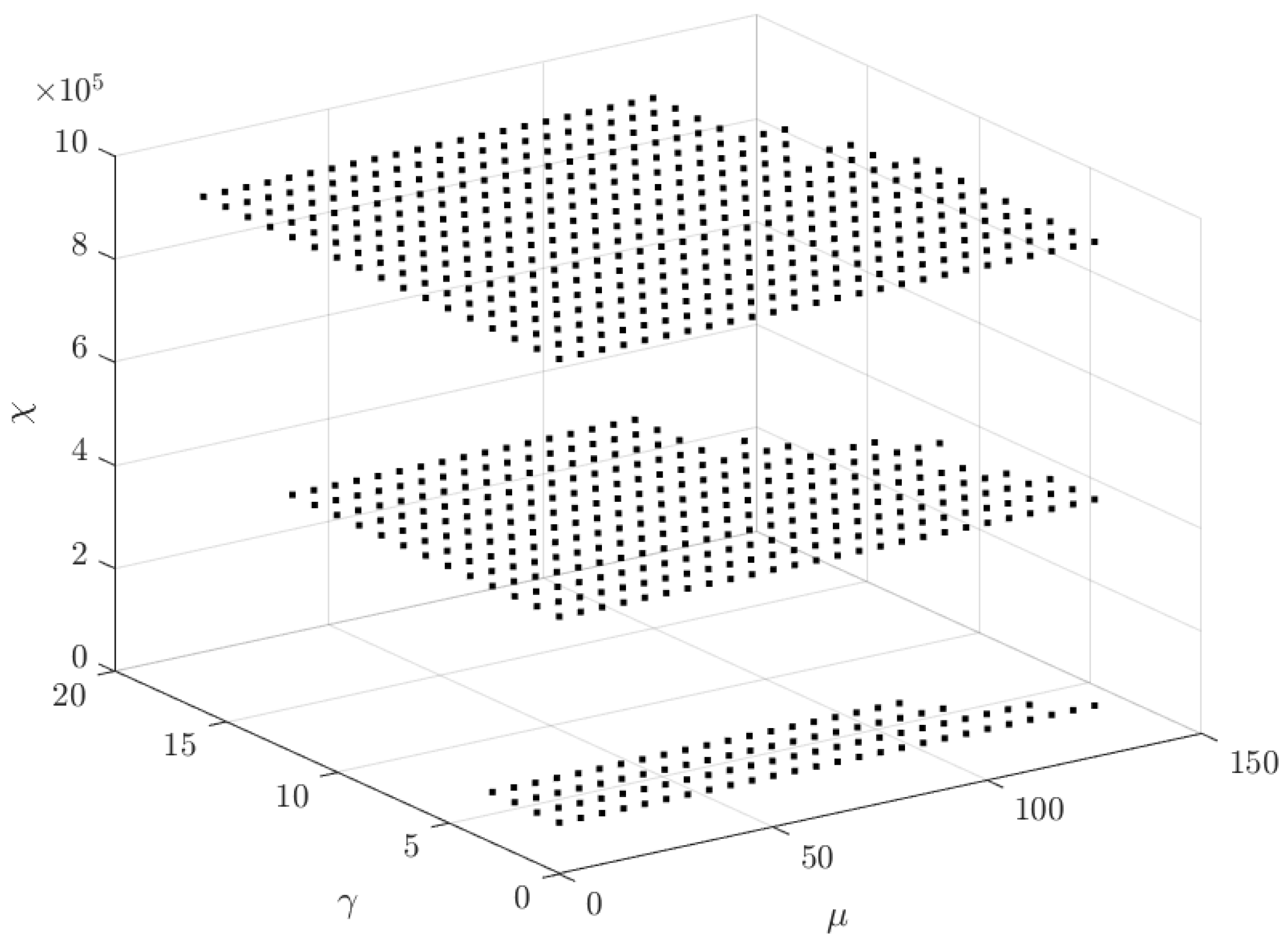
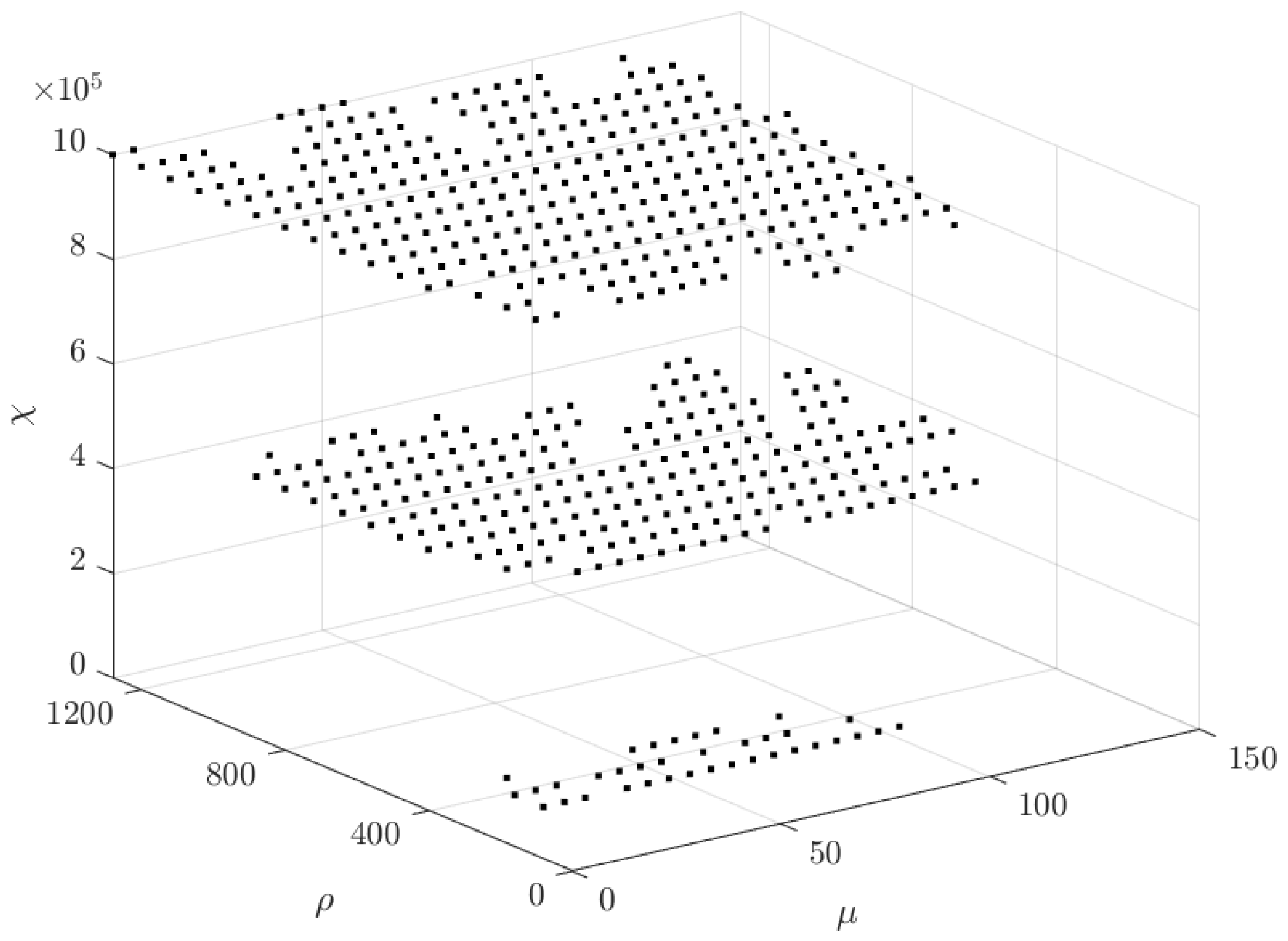
4.1. Optimized Initial Conditions
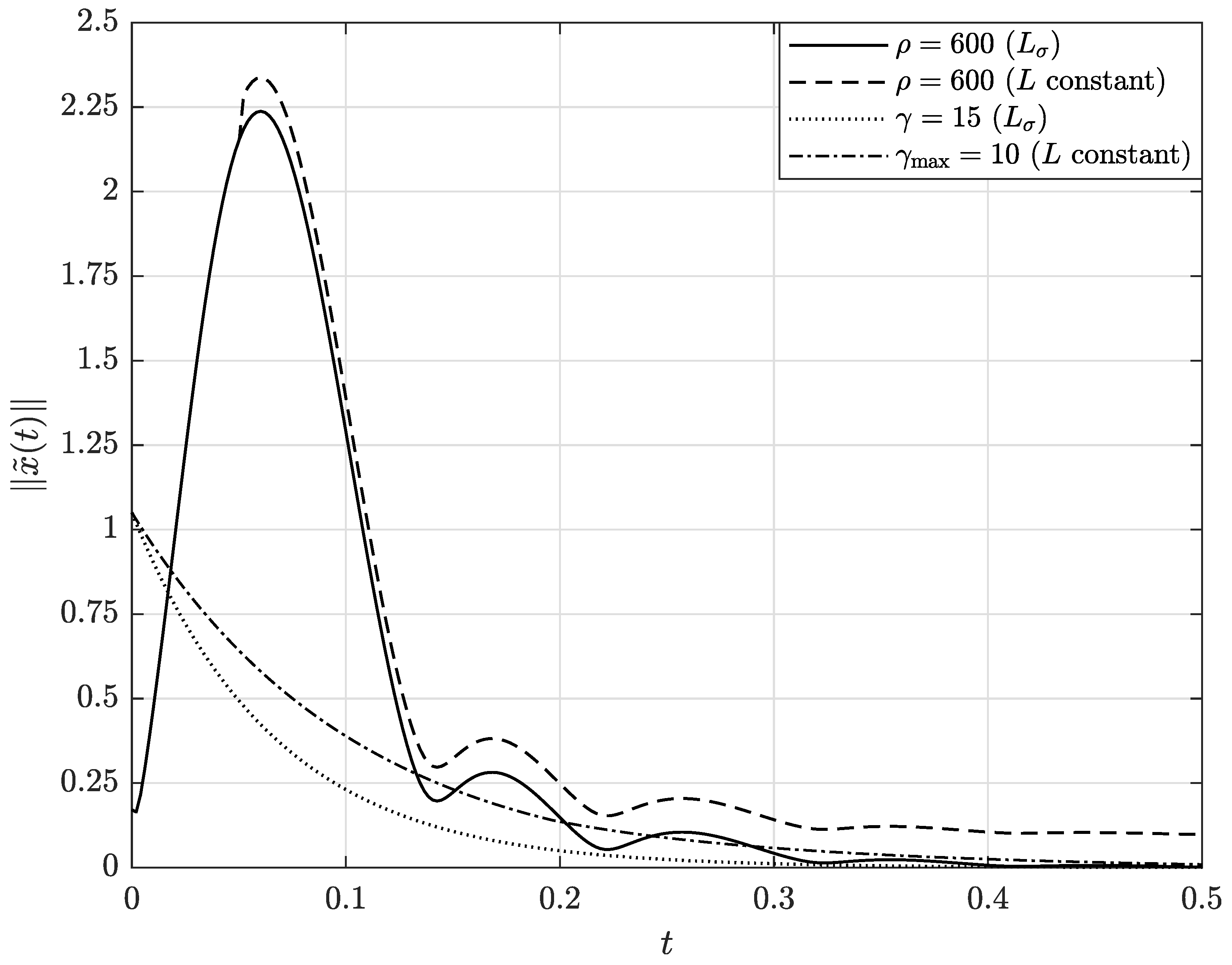
4.2. Observer Tests
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LPV | Linear parameter varying |
| TS | Takagi–Sugeno |
| DMVT | Differential mean value theorem |
| SDP | Semi-definite programming |
| LMIs | Linear matrix inequalities |
| SOSs | Sum of squares |
| LM | Lyapunov–Metzler |
| BMIs | Bilinear matrix inequalities |
References
- Kang, W.; Krener, A.J.; Xiao, M.; Xu, L. A survey of observers for nonlinear dynamical systems. In Data Assimilation for Atmospheric, Oceanic and Hydrologic Applications (Vol. II); Springer: Berlin/Heidelberg, Germany, 2013; pp. 1–25. [Google Scholar]
- Radke, A.; Gao, Z. A survey of state and disturbance observers for practitioners. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 6–11. [Google Scholar]
- Bernard, P.; Andrieu, V.; Astolfi, D. Observer design for continuous-time dynamical systems. Annu. Rev. Control 2022, 53, 224–248. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. State estimation for static neural networks with time-varying delays based on an improved reciprocally convex inequality. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1376–1381. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.M.; Han, Q.L.; Ge, X. Sufficient conditions for a class of matrix-valued polynomial inequalities on closed intervals and application to H∞ filtering for linear systems with time-varying delays. Automatica 2021, 125, 109390. [Google Scholar] [CrossRef]
- Zemouche, A.; Rajamani, R. Observer design for non-globally lipschitz nonlinear systems using hilbert projection theorem. IEEE Control Syst. Lett. 2022, 6, 2581–2586. [Google Scholar] [CrossRef]
- Phanomchoeng, G.; Rajamani, R. Observer design for Lipschitz nonlinear systems using Riccati equations. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6060–6065. [Google Scholar]
- Papageorgiou, P.C.; Alexandridis, A.T. A New Approach for Designing Stable Nonlinear bounded-Lipschitz Observers. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 16–18 September 2020; pp. 150–155. [Google Scholar]
- Zhang, W.; Su, H.; Zhu, F.; Azar, G.M. Unknown input observer design for one-sided Lipschitz nonlinear systems. Nonlinear Dyn. 2015, 79, 1469–1479. [Google Scholar] [CrossRef]
- Arefanjazi, H.; Ataei, M.; Ekramian, M.; Montazeri, A. A robust distributed observer design for Lipschitz nonlinear systems with time-varying switching topology. J. Frankl. Inst. 2023, 360, 10728–10744. [Google Scholar] [CrossRef]
- Zemouche, A.; Boutayeb, M. On LMI conditions to design observers for Lipschitz nonlinear systems. Automatica 2013, 49, 585–591. [Google Scholar] [CrossRef]
- Phanomchoeng, G.; Rajamani, R.; Piyabongkarn, D. Nonlinear observer for bounded Jacobian systems, with applications to automotive slip angle estimation. IEEE Trans. Autom. Control 2011, 56, 1163–1170. [Google Scholar] [CrossRef]
- Lam, H.; Leung, F.H.; Tam, P.K. A switching controller for uncertain nonlinear systems. IEEE Control Syst. Mag. 2002, 22, 7–14. [Google Scholar]
- Li, S.; Ahn, C.K.; Xiang, Z. Command-filter-based adaptive fuzzy finite-time control for switched nonlinear systems using state-dependent switching method. IEEE Trans. Fuzzy Syst. 2020, 29, 833–845. [Google Scholar] [CrossRef]
- Niu, B.; Zhao, P.; Liu, J.D.; Ma, H.J.; Liu, Y.J. Global adaptive control of switched uncertain nonlinear systems: An improved MDADT method. Automatica 2020, 115, 108872. [Google Scholar] [CrossRef]
- Elias, L.J.; Faria, F.A.; Magossi, R.F.; Oliveira, V.A. Switched control design for nonlinear systems using state feedback. J. Control Autom. Electr. Syst. 2022, 33, 733–742. [Google Scholar] [CrossRef]
- Liu, C.; Wen, G.; Zhao, Z.; Sedaghati, R. Neural-network-based sliding-mode control of an uncertain robot using dynamic model approximated switching gain. IEEE Trans. Cybern. 2020, 51, 2339–2346. [Google Scholar] [CrossRef] [PubMed]
- Rajamani, R.; Jeon, W.; Movahedi, H.; Zemouche, A. On the need for switched-gain observers for non-monotonic nonlinear systems. Automatica 2020, 114, 108814. [Google Scholar] [CrossRef]
- Rajamani, R.; Jeon, W.; Movahedi, H.; Zemouche, A. Vehicle motion estimation using a switched gain nonlinear observer. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 3047–3052. [Google Scholar]
- Nouriani, A.; McGovern, R.A.; Rajamani, R. Step length estimation with wearable sensors using a switched-gain nonlinear observer. Biomed. Signal Process. Control 2021, 69, 102822. [Google Scholar] [CrossRef]
- Ba, M.; Pianosi, P.; Rajamani, R. A switched-gain nonlinear observer for estimation of thoracoabdominal displacements and detection of asynchrony. Biomed. Signal Process. Control 2024, 96, 106494. [Google Scholar] [CrossRef]
- N’Doye, I.; Zhang, D.; Zemouche, A.; Rajamani, R.; Laleg-Kirati, T.M. A switched-gain nonlinear observer for LED optical communication. IFAC-PapersOnLine 2020, 53, 4941–4946. [Google Scholar] [CrossRef]
- Mohite, S.; Zemouche, A.; Haddad, M.; Alma, M.; Delattre, C.; Singh, N. H∞ Switched-Gain Based Observer vs Nonlinear Transformation Based Observer for a Vehicle Tracking Model. IFAC-PapersOnLine 2021, 54, 126–131. [Google Scholar] [CrossRef]
- Taghieh, A.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Rojsiraphisal, T.; Asad, J.H.; Zhilenkov, A. Observer-based control for nonlinear time-delayed asynchronously switching systems: A new LMI approach. Mathematics 2021, 9, 2968. [Google Scholar] [CrossRef]
- Garbouj, Y.; Dinh, T.N.; Raissi, T.; Zouari, T.; Ksouri, M. Optimal interval observer for switched Takagi–Sugeno systems: An application to interval fault estimation. IEEE Trans. Fuzzy Syst. 2020, 29, 2296–2309. [Google Scholar] [CrossRef]
- Tabbi, I.; Jabri, D.; Chekakta, I.; Belkhiat, D.E. Robust state and sensor fault estimation for switched nonlinear systems based on asynchronous switched fuzzy observers. Int. J. Adapt. Control Signal Process. 2024, 38, 90–120. [Google Scholar] [CrossRef]
- Han, J.; Liu, X.; Wei, X.; Zhang, H. Adjustable dimension descriptor observer based fault estimation for switched nonlinear systems with partially unknown nonlinear dynamics. Nonlinear Anal. Hybrid Syst. 2021, 42, 101083. [Google Scholar] [CrossRef]
- Zemouche, A.; Boutayeb, M.; Bara, G.I. Observer Design for Nonlinear Systems: An Approach Based on the Differential Mean Value Theorem. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 6353–6358. [Google Scholar]
- Geromel, J.C.; Colaneri, P. Stability and stabilization of continuous-time switched linear systems. SIAM J. Control Optim. 2006, 45, 1915–1930. [Google Scholar] [CrossRef]
- Lasdon, L.S. Optimization Theory for Large Systems; Dover Publications Inc.: Mineola, NY, USA, 2002. [Google Scholar]
- Mohammadpour, J.; Scherer, C.W. Control of Linear Parameter Varying Systems with Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- He, T.; Al-Jiboory, A.K.; Swei, S.S.M.; Zhu, G.G. Switching state-feedback LPV control with uncertain scheduling parameters. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 2381–2386. [Google Scholar]
- Deaecto, G.S.; Geromel, J.C. Switched state feedback control for continuous-time polytopic systems and its relationship with LPV control. In Proceedings of the 2009 European Control Conference (ECC), Budapest, Hungary, 23–26 August 2009; pp. 2073–2078. [Google Scholar] [CrossRef]
- Garg, K.M. Theory of Differentiation: A Unified Theory of Differentiation via New Derivate Theorems and New Derivatives; John Wiley & Sons: Hoboken, NJ, USA, 1998; Volume 28. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Alaridh, I.; Aitouche, A.; Zemouche, A. Fault sensor detection and estimation based on LPV observer for vehicle lateral dynamics. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 71–77. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Values |
|---|---|
| kg m2 | |
| kg m2 | |
| h | m |
| m | kg |
| B | m |
| Nm/V | |
| k | 1 Nm/rad |
| g | m/s2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yupanqui Tello, I.F.; Coutinho, D.; Mendoza Rabanal, R.M. Switched Observer Design for a Class of Non-Linear Systems. Appl. Syst. Innov. 2024, 7, 71. https://doi.org/10.3390/asi7040071
Yupanqui Tello IF, Coutinho D, Mendoza Rabanal RM. Switched Observer Design for a Class of Non-Linear Systems. Applied System Innovation. 2024; 7(4):71. https://doi.org/10.3390/asi7040071
Chicago/Turabian StyleYupanqui Tello, Ivan Francisco, Daniel Coutinho, and Renzo Martín Mendoza Rabanal. 2024. "Switched Observer Design for a Class of Non-Linear Systems" Applied System Innovation 7, no. 4: 71. https://doi.org/10.3390/asi7040071
APA StyleYupanqui Tello, I. F., Coutinho, D., & Mendoza Rabanal, R. M. (2024). Switched Observer Design for a Class of Non-Linear Systems. Applied System Innovation, 7(4), 71. https://doi.org/10.3390/asi7040071