Abstract
A polyvinyl alcohol (PVA)-coated optical fiber humidity sensor for respiratory monitoring is proposed. The humidity sensor forms a fiber Mach–Zehnder interferometer (MZI) by bending the single-mode fiber (SMF) coated with PVA. The refractive index of PVA coatings varies with changes in relative humidity (RH), causing phase changes in higher-order modes and resulting in shifts in the transmission spectrum. The sensor exhibits excellent dynamic humidity response performance (92.8 ms for response time and 63.6 ms for recovery time), realizing a humidity sensitivity of −1.927 nm/%RH within the humidity range of 86.1% to 92.2%. Compared to the balloon-shaped fiber optic sensor based on polydimethylsiloxane (PDMS) coating previously proposed by our research group, the PVA coating facilitates easier surface composite on the fiber, exhibits faster response speed, and its humidity response range is more suitable for respiratory monitoring. Ultimately, the sensor was encapsulated within a mask to enable human respiration monitoring functionality.
1. Introduction
Breathing is the foundation of life and the cornerstone of athletic performance. For the general public, respiratory rate, depth, and rhythm are monitored as foundational health indicators to identify early signs of disease. For athletes, respiratory monitoring can be used to assess cardiorespiratory potential. Additionally, monitoring athletes’ respiratory patterns can enhance respiratory efficiency, enabling precise regulation of exercise load and preventing sports injuries. Therefore, accurate monitoring of respiratory status is of great significance for both human health and athletes’ performance.
Classic fiber optic respiratory monitoring sensors monitor respiratory signals using three methods: measuring the expansion and contraction of the chest or abdomen, detecting changes in heat exhaled from the nasal cavity, and tracking changes in humidity produced during breathing. Strain sensors [1,2,3] and temperature sensors [4,5,6] can be used to monitor the first and second types of respiratory states. However, body movement can interfere with the signal from strain sensors, and fluctuations in ambient temperature can negatively impact the monitoring results of temperature sensors. The relative humidity (RH) of the airflow generated by humans during respiration can reach over 90% [7]. Furthermore, this humidity variation, from indoor humidity (30–60% RH) to 90% RH, is not affected by environmental factors, weather, or even exercise. Therefore, humidity can be used as a relatively direct measurement parameter to characterize human respiration.
In recent years, fiber optic humidity sensors have been widely studied due to their high sensitivity and stability, and various types of fiber optic humidity sensors have emerged, such as fiber Bragg gratings (FBG) [8,9,10], optical fiber interferometers [11,12,13], and surface plasmon resonance [14,15,16]. Du et al. coated etched single-mode fiber (SMF) with a MoS2 coating to monitor changes in RH, achieving a response time of 0.066 s and a recovery time of 2.395 s [17]. Hou et al. fabricated two Fabry–Perot interferometers (FPIs) using polyvinyl alcohol (PVA) and hollow optical fibers (HCFs), constructing a parallel FPI Vernier configuration, achieving a humidity sensitivity of −9.14 nm/%RH, a response time of 0.505 s, and a recovery time of 5.686 s [18]. Ding et al. bent SMF into a balloon structure and coated the fiber surface with graphene oxide (GO), which enabled a sensitivity of 0.449 nm/%RH, but its response time and recovery time were as long as several seconds, at 4.8 s and 7.8 s, respectively [19]. Liu et al. deposited a Ti3C2Tx coating on a tapered no-core fiber (NCF), resulting in a sensitivity of 685 pm/%RH, but its recovery time reached 12.7 s [20]. Since a respiratory cycle generally lasts 3–5 s, and can be shorter than 1 s during intense exercise, this necessitates a response time of milliseconds for the humidity sensor [21]. Chen et al. leveraged the hydrophilic properties of PVA to integrate its nanofibers with U-shaped micro-nanofibers, resulting in a sensor with a sensitivity of 0.21 nm/%RH, a response time of 0.54 s, and a recovery time of 0.5 s [22]. Qian et al. utilized a CO2 laser fusion machine to fabricate periodic micro-tapered structures on the surface of the SMF, endowing the sensor with rapid response to humidity changes, which could reach 0.237 s for response time and 0.299 s for recovery time [21]. Cong et al. effectively enhanced the humidity sensitivity of the sensor by leveraging the excellent hydrophilicity of Ti3C2Tx MXene nanosheets and the strong evanescent field of U-shaped tapered NCFs, enabling an ultra-fast response time of 25 ms with a sensitivity of 1.11 nm/%RH [23]. However, these sensors often require complex processing on the surface of the optical fiber, which not only increases costs due to the need for expensive equipment but also reduces the robustness and compactness of the sensor. Therefore, sensors in respiratory monitoring must feature a compact structure, robust performance, and ease of fabrication.
As a classic sensor that is easy to fabricate, fiber-optic balloon-shaped sensors have also been extensively studied for humidity monitoring and the detection of human physiological parameters. Sarah et al. achieved a humidity sensitivity of −0.571 nm/%RH and an ultrafast response time of 1.41 ms by sputtering a gold nanomembrane onto the surface of a SMF and bending it into a balloon shape [24]. Although the gold nanomembrane exhibits ultrafast response to humidity, it tends to detach from the fiber surface. Ding et al. coated SMF bent into a balloon shape with graphene oxide film, achieving a humidity sensitivity of 0.449 nm/%RH with response and recovery times of 4.8 s and 7.8 s, respectively [19]. However, the prolonged response and recovery times render this sensor unsuitable for respiratory monitoring. Mishra et al. embedded balloon-shaped fiber sensors within polydimethylsiloxane (PDMS) films, enabling wearable fiber sensing for wrist pulse and voice monitoring, as well as skin temperature tracking [25].
Our research group previously proposed a balloon-shaped fiber-optic respiratory monitoring sensor coated with PDMS, achieving a temperature sensitivity of −166.29 pm/°C with response and recovery times of 131.4 ms and 130.8 ms, respectively [6]. However, this sensor is susceptible to external temperature fluctuations during respiratory monitoring. Research has shown that the PDMS coating process is prone to the Plateau–Rayleigh instability, leading to the formation of a series of ellipsoidal spots on the SMF surface and thereby reducing sensor performance and product yield.
Through in-depth research into respiratory monitoring using optical fiber sensors, we have discovered that the relative humidity changes generated by human respiration remain stable regardless of external environmental humidity. Therefore, compared to using temperature as a respiratory monitoring parameter, employing humidity yields more stable results. Based on these findings, this paper, on the basis of the sensing structure previously published in the previous article, proposes a humidity sensor coated with polyvinyl alcohol (PVA) and utilizing a balloon-shaped optical fiber structure for respiratory monitoring. The sensor bends the SMF with a PVA coating into a balloon structure, causing the fundamental mode transmitted in the core to leak energy into the cladding when it enters the fiber bend region, thereby exciting higher-order cladding modes. As a moisture-sensitive material, PVA exhibits excellent hygroscopic properties and is easily composited with optical fibers. When environmental humidity changes, it causes the refractive index of the PVA coating to change, resulting in a phase shift of the higher-order modes propagating within the balloon-shaped fiber, which in turn leads to a shift in the transmitted spectrum. Within the humidity range of 86.1% to 92.2%, the sensor achieves a sensitivity of −1.927 nm/%RH, with 92.8 ms for response time and 63.6 ms for recovery time. The sensor’s high-sensitivity humidity range precisely matches the relative humidity variations generated by human respiration. Consequently, integrating this sensor into masks enables respiratory monitoring. Compared to the balloon-shaped respiratory sensor with PMDS coating proposed by our group, the proposed humidity sensor offers improved stability and advantages for respiratory monitoring, utilizing humidity over temperature. In terms of fabrication, PVA coating forms a more uniform layer on SMF surfaces than PDMS coating. Furthermore, the sensor exhibits high stability, high sensitivity, and excellent dynamic response, demonstrating potential value in fields such as health monitoring and competitive sports. It offers a new approach to developing more reliable and universally applicable fiber-optic wearable respiratory monitoring systems.
2. Sensing Structure and Principle of Operation
Figure 1 shows the schematic diagram of the proposed fiber optic humidity sensor structure. The balloon-shaped fiber cross-sectional length and bending diameter are defined as L and D, respectively. When input light propagates into a curved SMF, part of the energy of the fundamental mode transmitted in the core leaks into the cladding, exciting higher-order cladding modes. After the higher-order cladding modes propagate out of the curved SMF, part of the higher-order cladding modes re-couple back into the core and interfere with the fundamental mode, forming the Mach–Zehnder interferometer (MZI), whose output light intensity can be expressed as follows [26]:
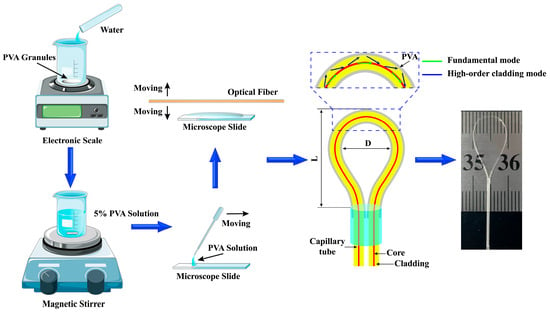
Figure 1.
Fabrication process and schematic diagram of the sensing structure for the balloon-shaped optical fiber humidity sensor.
Among them, denotes the intensity of the fundamental mode, and denotes the intensity of the higher-order cladding mode. is the initial phase, and is the phase difference between the high-order cladding mode and fundamental mode, expressed as
where is the effective bending length, is the input wavelength. is the difference in effective refractive index (ERI), is the effective refractive index of the fundamental mode, and is the effective refractive index of the higher-order cladding mode. When the phase difference satisfies an odd multiple of , destructive interference occurs. The wavelength of the interference dips can be expressed as
Therefore, using Equation (3), the relationship between , , and can be established. When remains constant, the position of depends on . The ERI of the higher-order cladding mode will change as the refractive index of the PVA coating varies with RH, causing phase shifts that ultimately result in transmission spectrum shift.
Because of the elastic-optical effect, when the SMF undergoes bending, its refractive index distribution exhibits asymmetry, as shown in Figure 2. The RI distribution redistributed along the x-axis can be equivalent to the distribution superimposed on a straight SMF, which can be expressed as [27]
where denotes the RI of the SMF in the straight state, while denotes the RI of the SMF in the bent state. denotes the coordinate parallel to the axis of the bent fiber. denotes the equivalent bending radius of the fiber, which can be expressed by the following equation [28]:
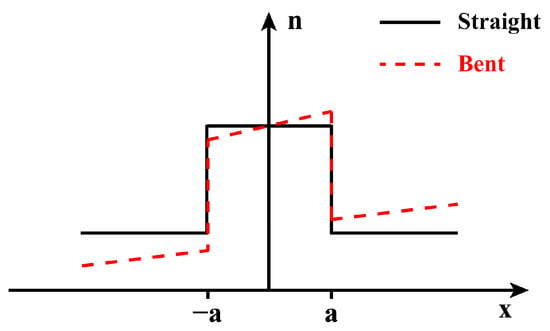
Figure 2.
RI distribution of straight and bent optical fibers.
Among them, and represent the photo-elastic tensor components, respectively. and represent the bending radius and Poisson’s ratio of the optical fiber.
Numerical simulations of PVA-coated SMFs were conducted using the 3D beam propagation method to obtain their optical field distributions at bending radii ranging from 7100 μm to 3100 μm with 800 μm intervals, to determine the required bending radii for subsequent experiments. Furthermore, to streamline the numerical simulation process, we selected the tip structure with a uniform bending radius from the balloon-shaped fiber structure for simulation. Equation (4) enables the refractive index distribution of the bent SMF to be equivalently mapped onto that of a straight SMF. Initially, the incident wavelength was set to 1550 nm, with the PVA coating’s refractive index and thickness set to 1.49 and 5 μm, respectively. The SMF length, core/cladding diameter, and refractive indices were set to 12,000 μm, 8.2/125 μm, and 1.4504/1.4447, respectively. The simulation results are shown in Figure 3. As the bending radius decreases, the core energy output exhibits a pattern of first decreasing, then increasing, and finally decreasing again. At a bending radius of 4700 μm, light energy transmitted in the core efficiently leaks into the cladding, exciting higher-order modes that then couple back into the core and interfere with the core mode. Therefore, the 4700 μm bending radius is selected as the optimal choice for subsequent experiments.
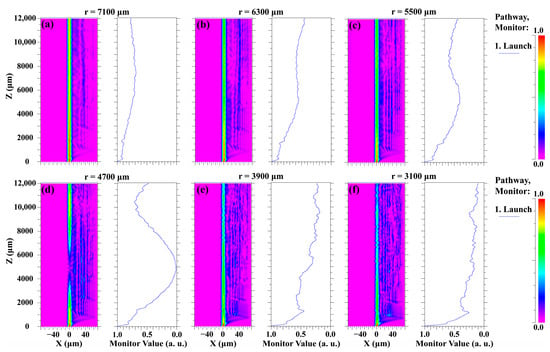
Figure 3.
Light field energy output at different bending radii. (a) r = 7100 μm, (b) r = 6300 μm, (c) r = 5500 μm, (d) r = 4700 μm, (e) r = 3900 μm, (f) r = 3100 μm.
3. Fabrication and Experiment Results
3.1. Sensor Fabrication and Experimental Platform Setup
The preparation process for the sensing unit is illustrated in Figure 1. First, add 2.5 g of PVA (Type 1799, Macklin Co., Shanghai, China) pellets to 47.5 mL of deionized water. Set the magnetic stirrer to 80 °C and 800 rpm, stirring the mixture for 2 h until the PVA pellets melt entirely, forming a 5 wt% PVA solution. Next, place the SMF (Corning SMF-28, Corning Incorporated, New York, NY, USA) with its coating layer removed onto the pulling machine and secure it with clamps to maintain a taut state. Then immerse the SMF in a 5%wt PVA solution, allow it to stand for 30 s, and pull it out. The SMF is cured at room temperature for 24 h. To ensure uniformity of the PVA coating on the fiber surface, the pulling machine speed is set to 500 μm/s. Finally, the fully cured SMF is bent through a capillary to achieve a 4.75 mm bending radius and a 17 mm balloon-shaped cross-sectional length, thereby obtaining the optimal extinction ratio for the interference dips. The fiber is secured at the point of contact with the capillary tube using UV glue.
Analysis of the PVA film coated onto the SMF surface showed the following results, as depicted in Figure 4. The thickness and uniformity of the PVA film were examined using scanning electron microscopy (SEM, JCM-7000, Japan Electronics Co., Ltd., Tokyo, Japan). The SEM image in Figure 4a reveals that after bending, the PVA film coating on the SMF exhibited consistent uniformity across its surface. Figure 4b indicates that the diameter of the SMF coated with PVA film is approximately 126.6 μm. Based on the previously measured SMF cladding diameter of 125 μm, the PVA film thickness is approximately 0.8 μm. Furthermore, even when magnified 10,000 times, the PVA film still exhibits clear uniformity.
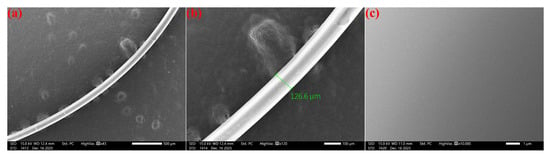
Figure 4.
SEM images of PVA coated on SMF at different scales: (a) 500 μm, (b) 100 μm, and (c) 1 μm.
The humidity sensing experimental setup is shown in Figure 5. The broadband light source (BLS, NKT Photonics, Copenhagen, Denmark, Superk COMPACT) emits laser light toward the sensor placed inside the relative humidity chamber (Xiya Instrument Equipment Co., Ltd., Shenzhen, China, XY-S-50L) and uses an optical spectrum analyzer (OSA, YOKOGAWA, Tokyo, Japan, AQ6370D) to record the transmission spectrum of the sensor. In the humidity sensing experiment, the chamber temperature is set to 27 °C to minimize the impact of temperature fluctuations on the experimental results. After five minutes of humidity changes in the relative humidity chamber, ensure the stability of the humidity within the chamber.

Figure 5.
Schematic diagram of humidity sensing experimental platform.
3.2. Humidity Sensitivity Characteristics
As shown in Figure 6a, within the wavelength range of 1475–1600 nm, the two interference dips in the transmission spectrum of the sensor are located at 1513.6 nm (dip A) and 1560.4 nm (dip B). Furthermore, when the RH inside the relative humidity chamber is below 62.9%, the transmission spectrum of the sensor remains largely unchanged. As RH exceeds 62.9%, the two interference dips of the sensor begin to blue-shift. When RH is within the range of 86.1–92.2%, dip A of the sensor drifts from 1502.8 nm to 1493.2 nm, blue-shifting by 9.6 nm, and dip B drifts from 1548.4 nm to 1536.4 nm, blue-shifting by 12 nm. After linear fitting, the results are shown in Figure 6b. Within the relative humidity range of 86.1–92.2%, the average sensitivities of dip A and dip B are −1.553 nm/%RH and −1.927 nm/%RH, respectively. Additionally, the blue shift in the wavelength positions of the interference dips with increasing RH is due to the decrease in the refractive index of the PVA film as humidity increases, while the decrease in the extinction ratio of the interference dips is primarily due to the absorption of water vapor, which reduces the reflectance of the PVA film and increases light absorption.
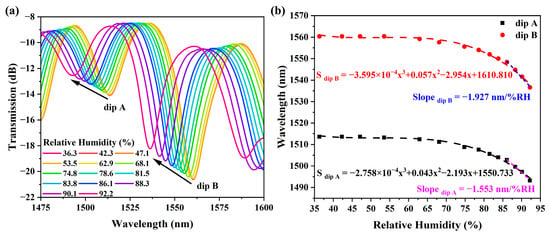
Figure 6.
Evolution trend and sensitivity of the sensor transmission spectrum. (a) Changes in the sensor’s transmission spectrum with increasing RH. (b) Curve fitting of the two dips under different RH conditions.
As shown in Figure 7, stability was evaluated for the sensor on days 3, 6, and 9 after fabrication under humidity conditions ranging from 40.8% to 92.8%. The transmission spectra of the sensor, which had undergone prolonged storage, exhibited no significant changes. Furthermore, as humidity increased, the interference dips also exhibited a blue shift. Within the humidity range of 85.1–92.8%, the sensor exhibited maximum sensitivities of −1.916 nm/%RH, −1.920 nm/%RH, and −1.922 nm/%RH on days 3, 6, and 9, respectively. Through the experimental results, it can be seen that the sensitivity fluctuation of the humidity sensor is within the range of 0.026 nm/%RH, indicating its good long-term stability.
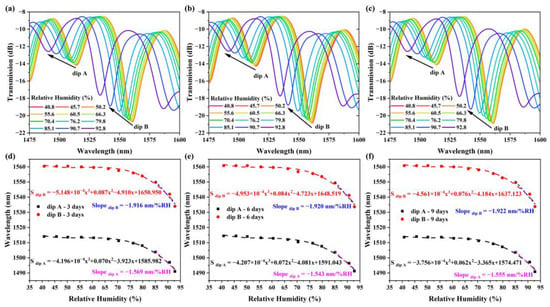
Figure 7.
Humidity stability of the sensor. (a–c) Transmission spectrum trends of the sensor on Days 3, 6, and 9. (d–f) Humidity sensitivity of the sensor on Days 3, 6, and 9.
3.3. Temperature Sensitivity Characteristics
To investigate the effect of temperature on the proposed balloon-shaped optical fiber sensor, the sensor was connected to the SLS and OSA, then placed on the thermostatic platform (Bakon, Shenzhen, China, BK946S, temperature control range 20–350 °C) under conditions of 36.8% RH. The initial temperature was set to 20 °C, and the temperature was incrementally raised to 70 °C in 5 °C intervals. After each temperature increase, the system was allowed to stabilize for 5 min before recording and saving the sensor’s transmission spectrum via the OSA. As shown in Figure 8a, both dip A and dip B of the sensor exhibited blue shifts with increasing temperature, and their sensitivity showed linear variation (see Figure 8b). The average sensitivities of dip A and dip B within the 20–70 °C temperature range were −27.60 pm/°C and −39.05 pm/°C, respectively. Furthermore, considering the sensor’s subsequent application in respiratory monitoring, temperature sensing experiments were conducted at intervals of 2 °C between 26 °C and 40 °C to match the temperature variations generated during human respiration. The experimental results are shown in Figure 9. Within this temperature range, the interference dips of the sensor exhibited a blue shift as the temperature increased, with temperature sensitivities of −29.29 pm/°C and −40.36 pm/°C, respectively. At the 1550 nm wavelength position, the change in light intensity was not significant. Therefore, changes caused by temperature can be neglected in subsequent respiratory monitoring experiments.
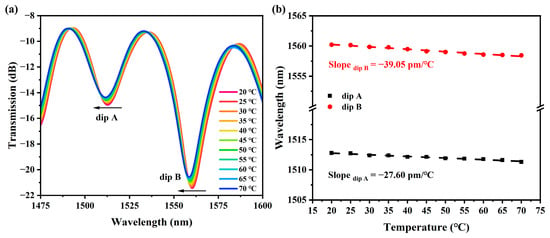
Figure 8.
Spectral evolution and sensitivity within the temperature range of 20 °C to 70 °C. (a) Spectral changes with increasing temperature. (b) Linear fitting curves of wavelength drift for dip A and dip B versus temperature.
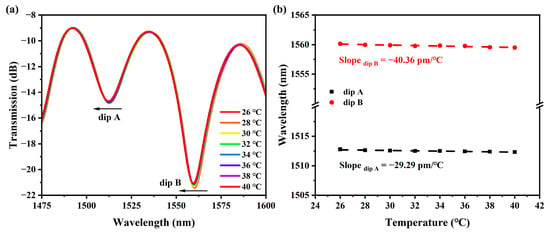
Figure 9.
Spectral evolution and sensitivity within the temperature range of 26 °C to 40 °C. (a) Spectral changes with increasing temperature. (b) Linear fitting curves of wavelength drift for dip A and dip B versus temperature.
3.4. Humidity Response and Respiratory Monitoring
Humidity response time and recovery time are crucial factors for the sensor’s application in respiratory state monitoring. Indoor RH takes several minutes to change from the initial value to the final value and return. However, the PVA-coated fiber interferometer sensor itself has a response time that is significantly faster than the time required for indoor humidity changes [29]. Therefore, in this work, using a chamber to alter relative humidity is not an appropriate method for evaluating the dynamic humidity response characteristics of the sensor. In contrast, since the relative humidity of the airflow during respiration exhibits step-like changes, the exhaled and inhaled airflow from a person can be directed to the sensor to analyze its dynamic performance [24].
Therefore, the sensor was placed together with a commercial humidity probe and subjected to sudden and rapid RH changes to measure its response time and recovery time to rapid RH variations. The humidity change is provided by the breath of an adult and applied to the sensor for approximately 3.5 s. The indoor humidity is approximately 36.1% RH, and the commercial humidity sensor detects the humidity of the exhaled airflow to be approximately 90.5% RH. The sensor light source utilizes the ORION 1550 nm Laser Module (RIO Lasers, Santa Clara, CA, USA). After modulation by the sensing structure, the photodetector (PD, Model 1617-AC, Newport, CA, USA) captures the optical signal and converts it into an electrical signal. Ultimately, an oscilloscope (OSC, MDO3104, Tektronix, OR, USA) records the signal. The output optical signal from the sensor exhibits clear periodic variations synchronized with the human breathing rhythm, as shown in Figure 10a, demonstrating excellent respiratory tracking capability. As shown in Figure 10b, the sensor exhibits an optimal response time (defined as the time for the output signal to rise from 10% to 90% of maximum power) of 92.8 ms, while the recovery time is 63.6 ms. The rapid dynamic characteristics make it suitable for real-time respiratory waveform monitoring.
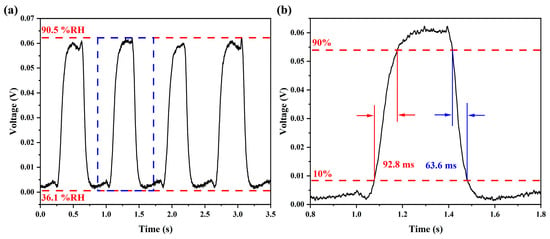
Figure 10.
The dynamic humidity response characteristics of the sensor. (a) Response characteristics when humidity rises from 36.1% RH to 90.5% RH. (b) Response time and recovery time after amplifying the humidity response waveform.
Based on the humidity response of the sensor, it was integrated into the mask to construct a respiratory monitoring sensor system. As shown in Figure 11, the ORION 1550 nm Laser Module serves as the light source at one end of the sensor. The output optical signal is converted into an electrical signal by the PD and undergoes real-time acquisition and waveform analysis via the OSC. Figure 12 displays real-time response waveforms of a volunteer under two typical respiratory states. It can be observed that during the exhalation phase, the significantly increased humidity of the exhaled gas first causes a slight decrease in the sensor’s transmitted light intensity, followed by a sharp increase. During the inhalation phase, as dry external air enters the mask, the signal rapidly returns to the baseline level, demonstrating excellent reversibility and response consistency. Further analysis indicates that during rest, the normal breathing frequency is approximately 0.3 Hz, while after exercise, it increases to 0.9 Hz. The sensor clearly distinguishes between these distinct breathing patterns and accurately captures respiratory rhythms.
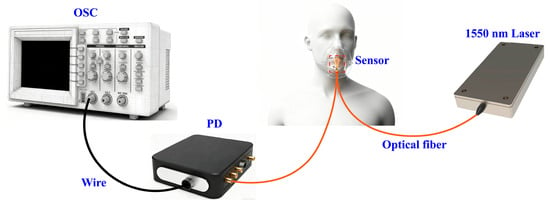
Figure 11.
Schematic diagram of respiratory monitoring device.
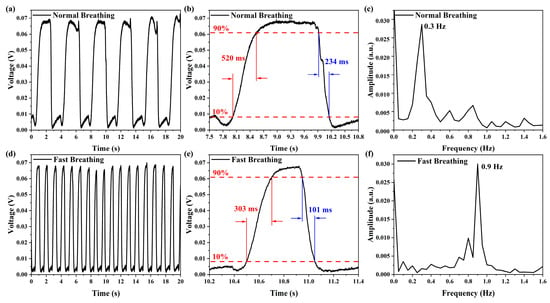
Figure 12.
Respiratory waveforms, response times, and respiratory rates under different nasal breathing patterns. (a–c) Normal breathing. (d–f) Fast breathing.
Additionally, the sensor exhibits differing dynamic response characteristics under various breathing patterns. During fast breathing, the increased airflow velocity reduces the adsorption/desorption times of water molecules on the PVA coating surface. Consequently, both the 303 ms of response time and the 101 ms of recovery time under fast breathing are significantly faster than those under normal breathing. Overall, the sensor demonstrates sufficient responsiveness to comprehensively and accurately track the entire human breathing cycle, indicating strong potential for practical applications.
3.5. Performance Comparison
Finally, Table 1 compares the performance of the proposed PVA-coated balloon-shaped humidity sensor with other fiber-optic humidity sensor structures. It is evident that, compared to sensor structures fabricated using chemical etching, tapered machining, precise alignment, and fusion splicing processes, the proposed sensor requires only precise control of the bending radius when bending SMF into a balloon shape, thereby significantly simplifying the fabrication process and substantially reducing costs. Although the proposed sensor exhibits good linear response only within the 86.1–92.2% RH range, this range is precisely suited for respiratory monitoring applications. Additionally, the proposed sensor’s rapid dynamic response characteristics (response time: 92.8 ms and recovery time: 63.6 ms) demonstrate significant potential for respiratory monitoring applications. Furthermore, compared with the PDMS-coated fiber-optic respiratory monitoring temperature sensor with a balloon-shaped structure previously proposed by our research group, the sensor introduced in this paper demonstrates significant improvements in dynamic response metrics, including response time and recovery time. The earlier sensor design was susceptible to temperature fluctuations during respiratory monitoring, and, due to the Plateau–Rayleigh instability, the PDMS coating was prone to forming uneven layers during application, which could adversely affect sensor performance.

Table 1.
Compared Performance of Different Optical Fiber Sensors in Humidity Sensing.
4. Conclusions
In conclusion, a humidity sensor based on a PVA-coated balloon-shaped fiber optic structure is developed for respiratory monitoring applications. The balloon structure is formed by bending the SMF coated with PVA to a radius of 4.75 mm, thereby constructing an optical fiber MZI with significant interference effects. Through experimental results, it can be seen that in the humidity range of 86.1% to 92.2%, the sensor reaches the sensitivity of −1.927 nm/%RH, with 92.8 ms for response time and 63.6 ms for recovery time. Furthermore, integrating the sensor into a respiratory mask enables the identification of different human respiratory patterns. Compared to the balloon-shaped fiber-optic sensor with a PDMS coating previously proposed by our research group, the PVA coating facilitates easier surface composite formation on the fiber, exhibits faster response times, and demonstrates greater stability when monitoring human respiratory changes via humidity detection rather than temperature monitoring. Featuring high sensitivity, compactness, stability, and rapid dynamic response, this sensor demonstrates promising application potential in health monitoring and competitive sports. It offers a new approach to developing more reliable and universally applicable wearable respiratory monitoring systems.
Author Contributions
Conceptualization, Y.C. and F.P.; methodology, F.P.; software, Y.Z.; validation, Q.S. and W.X.; formal analysis, F.P.; investigation, Q.S.; resources, F.P.; data curation, Q.S.; writing—original draft preparation, Q.S., Y.C. and F.P.; writing—review and editing, Q.S., Y.C. and F.P.; visualization, W.X.; supervision, Y.C. and F.P.; project administration, F.P.; funding acquisition, F.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (grant number 61775044) and the Independent Cultivation Program of Innovation Team of Ji Nan City (grant number 202333042).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data will be available upon request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shao, M.; Yuan, Y.; Liu, Y.; Fu, H.; Qiao, X. All-Fiber Michelson Interferometer for Heart Rate and Breath Monitoring. IEEE Sens. J. 2024, 24, 23909–23917. [Google Scholar] [CrossRef]
- Cao, Z.; Shao, M.; Yuan, Y.; Ma, X.; Yu, Y.; Qiao, X. In-Fiber Mach-Zehnder interferometer for wearable respiration measurement. Sens. Actuators A 2023, 364, 114806. [Google Scholar] [CrossRef]
- Zha, B.; Wang, Z.; Li, L.; Hu, X.; Ortega, B.; Li, X.; Min, R. Wearable cardiorespiratory monitoring with stretchable elastomer optical fiber. Biomed. Opt. Express 2023, 14, 2260–2275. [Google Scholar] [CrossRef]
- Li, Z.; Wu, Z.; Li, Z.; Ou, L.; Zhang, W.; Lai, Z.; Zhang, Y.; Xie, M.; Tang, J.; Zhu, W.; et al. High-sensitivity and fast-response fiber optic temperature sensor using an anti-resonant reflecting optical waveguide mechanism. Photonics Res. 2023, 11, 1397–1407. [Google Scholar] [CrossRef]
- Cheng, J.; Zhang, L.; Zhao, K.; Wang, Y.; Cao, X.; Zhang, S.; Niu, W. Flexible Multifunctional Photonic Crystal Fibers with Shape Memory Capability for Optical Waveguides and Electrical Sensors. Ind. Eng. Chem. Res. 2021, 60, 8442–8450. [Google Scholar] [CrossRef]
- Shi, Q.; Cui, Y.; Zhang, Y.; Zhang, J.; Peng, F. A PDMS Coating-Based Balloon-Shaped Fiber Optic Respiratory Monitoring Sensor. Sensors 2025, 25, 5174. [Google Scholar] [CrossRef] [PubMed]
- Kano, S.; Kim, K.; Fujii, M. Fast-Response and Flexible Nanocrystal-Based Humidity Sensor for Monitoring Human Respiration and Water Evaporation on Skin. ACS Sens. 2017, 2, 828–833. [Google Scholar] [CrossRef]
- Bao, W.; Chen, F.; Lai, H.; Liu, S.; Wang, Y. Wearable breath monitoring based on a flexible fiber-optic humidity sensor. Sens. Actuators B 2021, 349, 130794. [Google Scholar] [CrossRef]
- Peng, J.; Zhou, J.; Sun, C.; Liu, Q.; Esposito, F. Optical Fiber Temperature and Humidity Dual Parameter Sensing Based on Fiber Bragg Gratings and Porous Film. Sensors 2023, 23, 7587. [Google Scholar] [CrossRef] [PubMed]
- Woyessa, G.; Theodosiou, A.; Markos, C.; Kalli, K.; Bang, O. Single Peak Fiber Bragg Grating Sensors in Tapered Multimode Polymer Optical Fibers. J. Light. Technol. 2021, 39, 6934–6941. [Google Scholar] [CrossRef]
- Duan, Z.; Zhou, R.; Li, L.; Wang, Y.; Ling, Q.; Yu, Z.; Wang, Y.; Zhang, Y.; Mao, B.-M.; Chen, D. Lab-on-Fiber Microfiber Knot Resonator for Respiratory Rate Sensing. IEEE Sens. J. 2025, 25, 19308–19314. [Google Scholar] [CrossRef]
- Luo, S.; Ding, Y.; Zhu, X.; Li, Y.; Ling, Q.; Duan, Z.; Zhang, Y.; Chen, H.; Yu, Z.; Du, K.; et al. Lab-on-Fiber Humidity Sensor for Real-Time Respiratory Rate Monitoring. IEEE Sens. J. 2024, 24, 20663–20668. [Google Scholar] [CrossRef]
- Luo, H.; Liang, L.; Ma, X.; Liu, N.; Huang, S.; Sun, H. Relative Humidity and Temperature Sensing Characteristics of an Optical Fiber Probe Based on Hollow-Core Fiber and Calcium Alginate Hydrogel Film. IEEE Sens. J. 2018, 18, 8022–8027. [Google Scholar] [CrossRef]
- Guo, H.; Ning, Y.; Zhang, Y.; Qin, Y.; Ren, Z.; Gu, W.; Mou, J.; Zhang, M.; Liu, Z.; Zhang, Y.; et al. Wearable Fiber SPR Respiration Sensor Based on a LiBr-Doped Silk Fibroin Film. ACS Sens. 2023, 8, 4171–4178. [Google Scholar] [CrossRef]
- Mohan, S.; Banoo, F.; Negi, M.S.; Paul, D. LSPR-Based Optical Fiber Sensor Utilizing GO-ZnO Nanocomposite for Relative Humidity Measurement. IEEE Photon. Technol. Lett. 2025, 37, 145–148. [Google Scholar] [CrossRef]
- Tong, R.; Wang, Y.; Zhao, K.-j.; Li, X.; Zhao, Y. Surface plasmon resonance optical fiber sensor for relative humidity detection without temperature crosstalk. Opt. Laser Technol. 2022, 150, 107951. [Google Scholar] [CrossRef]
- Du, B.; Yang, D.; She, X.; Yuan, Y.; Mao, D.; Jiang, Y.; Lu, F. MoS2-based all-fiber humidity sensor for monitoring human breath with fast response and recovery. Sens. Actuators B 2017, 251, 180–184. [Google Scholar] [CrossRef]
- Hou, L.; Li, Y.; Fu, Y.; Yang, J.; Xu, W.; Song, X.; Li, J.; Liu, Y.; Ran, L. Ultra-Sensitive Optical Fiber Humidity Sensor via Au-Film-Assisted Polyvinyl Alcohol Micro-Cavity and Vernier Effect. IEEE Trans. Instrum. Meas. 2022, 71, 7002009. [Google Scholar] [CrossRef]
- Ding, X.; Yan, J.; Chen, N.; Jin, T.; Zhang, R. Highly sensitive balloon-like fiber interferometer based on GO nanomaterial coated for humidity measurement. Opt. Laser Technol. 2023, 158, 108798. [Google Scholar] [CrossRef]
- Liu, P.; Feng, L.; Chen, H.; Li, P.; Ma, X.; Lv, M. Humidity sensor based on tapered no-core fiber coated with Ti3C2Tx MXene. Ceram. Int. 2024, 50, 23586–23592. [Google Scholar] [CrossRef]
- Qian, J.; Wang, W.; Chen, H.; Zhang, J.; Liu, G.; Guo, Z.; Zhang, X.; Li, X. In-Fiber Breathing Monitoring Sensor by Micro-Tapered Long-Period Grating Structure. IEEE Sens. J. 2023, 23, 154–158. [Google Scholar] [CrossRef]
- Chen, T.; Jiang, H.; Xia, H.; Luo, H.; Xie, K. U-Shaped microfiber sensor coated with PVA nanofibers for the simultaneous measurement of humidity and temperature. Sens. Actuators B 2023, 378, 133203. [Google Scholar] [CrossRef]
- Cong, J.; Yang, M.; Zhou, D.; Meng, L.; Feng, S.; Lv, M. High sensitivity humidity sensor based on the U-shaped tapered no-core fiber coated with MXene. Opt. Lett. 2024, 49, 2946–2949. [Google Scholar] [CrossRef] [PubMed]
- Al-Hayali, S.K.; Salman, A.M.; Al-Janabi, A.H. High sensitivity balloon-like interferometric optical fiber humidity sensor based on tuning gold nanoparticles coating thickness. Measurement 2021, 170, 108703. [Google Scholar] [CrossRef]
- Mishra, P.; Goswami, D.N.; Kumar, S.; Jha, R. Polymer-Layered Optical Wearable (PLOW) for Healthcare Applications: Temperature and Stretching Monitoring. ACS Appl. Mater. Interfaces 2025, 17, 7489–7497. [Google Scholar] [CrossRef]
- Al-Janabi, D.I.; Salman, A.M.; Al-Janabi, A. High-Sensitivity balloon-like thermometric sensor based on bent single-mode fiber. Meas. Sci. Technol. 2020, 31, 115106. [Google Scholar] [CrossRef]
- Schermer, R.T.; Cole, J.H. Improved Bend Loss Formula Verified for Optical Fiber by Simulation and Experiment. IEEE J. Quantum Electron. 2007, 43, 899–909. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, Y.; Lv, R.-Q.; Wang, Q. Enhancement of RI Sensitivity Through Bending a Tapered-SMF-Based Balloon-Like Interferometer. J. Light. Technol. 2016, 34, 3293–3299. [Google Scholar] [CrossRef]
- Al-Hayali, S.K.; Salman, A.M.; Al-Janabi, A.H. Effect of hygroscopic polymer-coatings on the performance of relative humidity sensor based on macro-bend single-mode fiber. Opt. Fiber Technol. 2021, 62, 102460. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.