Abstract
Two contact models are considered, with the behavior of the materials being described by a constitutive law governed by the subdifferential of a convex map. We deliver variational formulations based on the theory of bipotentials. In this approach, the unknowns are pairs consisting of the displacement field and the Cauchy stress tensor. The two-field weak solutions are sought into product spaces involving variable convex sets. Both models lead to variational systems which can be cast in an abstract setting. After delivering some abstract results, we apply them in order to study the weak solvability of the mechanical models as well as the data dependence of the weak solutions.
1. Introduction
The necessity of a better approximation of the solutions of physical models by using numerical methods determined the consideration of additional fields in the variational setup, leading to multifield variational formulations; see, e.g., [1,2,3] and the references therein for some variational approaches based on the saddle point theory. When the constitutive laws present in the description of the models are governed by possibly set-valued operators, then a possible approach is the one governed by bipotentials (see, e.g., [4,5,6,7]); for other relevant works devoted to bipotentials and their applicability in mechanics, we refer, for instance, to [8,9,10,11].
The present paper is a new contribution to the variational formulations governed by bipotentials in solid mechanics, addressing models whose constitutive laws are described by means of the subdifferential of a convex map. Two contact models are under our attention. The first model involves the Winkler condition on the contact zone, with such a boundary condition having extensive applications in civil engineering, e.g., [12]. The second model involves a regularized Coulomb friction law; see, e.g., [13] (pp. 107–110) and the references therein for details. We emphasize that the second model is strongly nonlinear—the nonlinearity arising not only from the constitutive law, but also from the friction law.
We focus on the existence and the uniqueness of the weak solutions and also on their dependence on the data.
Due to the separability property of the bipotential which is involved, the variational formulations we deliver can be cast in an abstract variational system of the form below
The unknown is the pair for given and It is worth emphasizing that the second variational inequality is written on a set which depends on the first component of the pair solution, u. In order to investigate the existence and the uniqueness of the solution of this abstract system, we use elements of convex analysis, a crucial role being played by a minimization argument. On the other hand, by using the weak topology and a Mosco convergence technique, we investigate the continuity of the solution operator
proving its demicontinuity, i.e., we prove that if in as then in as Afterward, we apply the abstract results in order to study the mechanical models under consideration.
This work can be seen as a continuation of [7]. The model studied in [7] can be revisited by applying the abstract results obtained in the present paper.
It is worth mentioning that the subdifferential of convex maps is present not only in solid mechanics but also in many other fields of mathematical physics. The subdifferential of convex maps is widely used especially in those cases in which the materials have an extremely complex intrinsic structure, such as complex fluids and/or magnetorheological fluids; see, e.g., [14,15,16,17].
The rest of the paper is structured as follows: In Section 2, we indicate some preliminaries, including basic facts of convex analysis. In Section 3, we present two mechanical models and their corresponding two-field weak formulations via bipotentials. Section 4 is devoted to some abstract results which are applied in Section 5 in order to obtain existence and uniqueness results as well as some properties of the weak solutions. Finally, Section 6 is devoted to conclusions and perspectives.
2. Preliminaries
For the convenience of the reader, we present in this section some notations, preliminary results from convex analysis and definitions of some mathematical concepts that are used throughout the paper. Everywhere in the present work, by the abbreviation a.e., we mean “almost everywhere”. Throughout this paper, denotes the space of second-order symmetric tensors on Every field in or is typeset in boldface. By · and :, we denote the inner product on and , respectively, while by means of the notation and , we denote the Euclidean norm on and , respectively.
Let be a bounded domain with smooth enough boundary . We begin with the description of the spaces that are used in this paper:
- is a Hilbert space endowed with the inner product
- is a Hilbert space endowed with the inner product
- , with such that is a Hilbert space endowed with the inner product In this context, it is worth recalling Korn’s inequality: there exists such thatsee, e.g., [18].Recall also (see, e.g., [13] (p. 85)) thatis a linear and continuous operator and that is the linear and continuous Sobolev trace operator for vector-valued functions;As then is a linear and compact operator for each r such that see, e.g., Theorem 2.21 in [19].
- where and being the unit outward normal to , is a closed subspace of see, e.g., [13] (p. 88). Recall that is a Hilbert space, where
Afterward, we recall some tools of convex analysis which are very helpful in our study.
Theorem 1.
Let be a Hilbert space and let be a Gâteaux differentiable function. Then, the following statements are equivalent:
- (i)
- φ is a convex functional;
- (ii)
- for all
In the variant of strict convexity, inequality should be strict for
The proof can be found in [20] (pp. 180–183). The following theorem is another relevant result, which can be found in many books, see, e.g., [21] (p. 45).
Theorem 2.
Let be a Hilbert space and let be a proper, convex, lower semicontinuous functional. Then,
- (i)
- for each we have ;
- (ii)
- for each we have the equivalences
Herein, denotes the Fenchel conjugate of ,
In addition, we shall need the following minimization theorem.
Theorem 3.
Let X be a Hilbert space and let K be a nonempty closed convex subset of X. Let be a convex lower semicontinuous function. Then, J is bounded from below and attains its infimum on K whenever one of the following two conditions hold:
- (i)
- K is bounded;
- (ii)
- J is coercive, i.e., as
Moreover, if J is a strictly convex function, then J attains its infimum on K at only one point.
The proof can be found in [13] (pp. 29–30). Minimization results can be found in many books; see, for instance, [21,22,23].
Since bipotentials are the key ingredients of our approach, we state here the following definition, which can be found in [24].
Definition 1.
Let be a Hilbert space. A bipotential is a function with the following three properties:
- (i)
- B is convex and lower semicontinuous in each argument;
- (ii)
- for each , we have ;
- (iii)
- for each , we have the equivalences
Finally, we consider a concept of convergence of convex sets originating from Mosco’s theory; see, e.g., [25] for more details on this topic.
Definition 2.
Let X be a Hilbert space. Let be a sequence of nonempty subsets and .
The sequence converges to in the sense of Mosco () if:
- (i)
- for each sequence such that for each and in X, we have ;
- (ii)
- for every there exists a sequence such that for each and in
3. The Models and Their Weak Formulations
We consider a body that occupies a bounded domain with smooth boundary , partitioned in three measurable parts, and such that The body is clamped on , body forces of density act on and surface tractions of density act on The part is the contact zone. According to this physical setting, see Figure 1, we formulate the following boundary value problem: find and such that
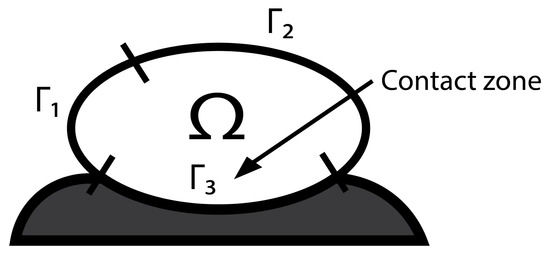
Figure 1.
Physical setting.
As contact condition and friction law we firstly use
Secondly we are going to set
As usual, we denoted by the displacement field, by the infinitesimal strain tensor and by the Cauchy stress tensor. The normal and the tangential components of the Cauchy vector on the boundary are defined by the formulas (see, e.g., [13] (p. 89)), while the normal and the tangential components of the displacement vector on the boundary are defined by the formulas (see, e.g., [13] (p. 86)).
Thus, each of our models consists of the equilibrium Equation (10), the set-valued constitutive law (11) governed by the constitutive function , the homogeneous displacement condition (12), the traction condition (13), and one of the boundary conditions (15) and (16). In (15), we have a frictionless contact condition involving the Winkler contact law, a law which describes in a simplified manner the interaction between a deformable body and the soil (see [12]). The boundary condition (16) is a frictional bilateral contact condition involving a static version of a regularized Coulomb friction law, see, e.g., [13] (pp. 107–110). For relevant engineering examples in contact mechanics, we refer, for instance, to [26,27,28].
We study successively the problems (10)–(13) (15) and (10)–(13) (16). Let us make the following assumptions:
Assumption A1.
The constitutive function is convex and lower semicontinuous. In addition, there exist such that and for all
Assumption A2.
The densities of the volume forces and tractions verify
Using a similar technique with that used in [7], Theorem 2 allows us to write the following two-field weak formulation for the problem (10)–(13) (15).
Problem 1.
Find and such that
with as follows.
- The map is the bifunctionalthe map B being the bipotentialHerein, denotes the Fenchel conjugate of ,We emphasize that, due to Assumption 1, for all Moreover, it can be proved that its Fenchel conjugate has a similar property: if are the constants in Assumption 1, thensee, e.g., [5,6]. It follows that for all Therefore, for all
- The bifunctional is defined as follows:
- The element is defined as follows:
- Given stands for a variable subset of defined as follows: for each
Definition 3.
Problem 2.
Find and such that
with as below.
- The bifunctional is defined as follows:
- The element is defined as follows:
- Given , denotes a variable subset of defined as follows: for each
4. Abstract Results
Let and be two real Hilbert spaces. The first part of this section is devoted to the study of the solvability for the following variational system.
Problem 3.
Find and such that
In order to prove the existence of at least one solution for Problem 3, we shall assume the following hypotheses.
- (H1)
- (H2)
- is a bifunctional such thatwhere is a convex, lower semicontinuous and Gâteaux differentiable functional, denoting the Gâteaux gradient in
- (H3)
- is a convex and lower semicontinuous map. In addition, there exists such that for all .
- (H4)
- is a convex and lower semicontinuous map. In addition, there exists such that for all .
- (H5)
- For each is a nonempty closed convex subset of Y.
The first abstract result is given by the following theorem.
Theorem 4.
If (H1)–(H5) hold true, then Problem 3 admits at least one solution. If, in addition, J and are strictly convex, then Problem 3 admits a unique solution.
Proof.
We claim that Problem 3 is equivalent to the following problem:
find and such that
Indeed, according to Theorem 1, due to the convexity and the Gâteaux differentiability of the functional considered in (H2), we have
Note that using (35) the above relation yields
As a result, if is a solution of Problem 3, then verifies .
Conversely, let be a solution of .
Setting in (36) with arbitrarily fixed and a real number, then for all , we can write
We now use the convexity of J from (H3) to obtain
for all Passing to the limit when as is Gâteaux differentiable, we obtain
Therefore, if is a solution of , then verifies Problem 3.
Let us define now the functional
Note that can be written as follows: find and such that
It is easy to observe that is convex, lower semicontinuous and coercive, due to the properties of J and from (H2) and (H3). Therefore, using Theorem 3, we deduce that has at least one minimum on X. Let be such an element. Consider now the subset Keeping in mind (H5) with , we note that is a nonempty closed convex set. Since fulfills (H4), we apply again Theorem 3 to obtain that has at least one minimum on . We conclude that is a solution of Problem 3. In order to study the uniqueness, we admit in addition that the functionals J and are strictly convex. Then, has a unique minimum u on X, and has a unique minimum on Therefore, the pair is the unique solution of Problem 3. □
We are now interested in finding some properties of the solution. Precisely, we are interested to study the dependence of the solution on the data f and . For the next result, we need additional hypotheses.
- (H6)
- J and vanish in ;
- (H7)
- There exists such that for all ;
- (H8)
- There exists such that for all ;
- (H9)
- There exists a linear and continuous operator such that, for each
The next proposition delivers useful information that is exploited for the later results.
Proposition 1.
Consider (H1)–(H9). Let be a solution of Problem 3. Then,
Proof.
As (see (H2)) and (see (H1)), by using (H3), we obtain
which implies (46).
In order to obtain (47), we firstly write
Let Then, by (H8), we have
Finally, let us prove (48). Since is a solution of Problem 3, then
The above inequality and the hypotheses (H4) and (H7) lead us to
Since (H9) holds, let us take in (54). From the linearity and continuity of T, we know that Hence, we obtain
which leads to
For the next result, we need new hypotheses.
- (H10)
- is upper semicontinuous.
- (H11)
- If , and are three sequences and are three elements such thatthen
We are now in the position to prove our next abstract result, which shows how the solution depends on the data.
Theorem 5.
We admit (H1)–(H11), and in addition, we assume that J and are strictly convex. The operator
associated with Problem 3 is demicontinuous.
Proof.
Let be a convergent sequence to f, and let be a convergent sequence to Let n be a positive integer, and let be the unique solution of Problem 3 corresponding to We denote by the unique solution of Problem 3 corresponding to .
Since is a convergent sequence, then there exists such that
Keeping in mind Proposition 1, by (60) we obtain
which means that the sequence is bounded. Therefore, there exists a subsequence and an element such that
On the other hand, keeping in mind Proposition 1, for each
As and are bounded sequences, then there exists such that
which implies that there exists a subsequence of such that
As a result, there exist and such that
being the unique solution of Problem 3 corresponding to the data for a fixed
We know that the following inequality holds:
We also know that the following inequality holds:
We want to prove that for all , we have
For this purpose, let . Notice that (H10) implies
Therefore, there exists such that for each and in Y as
Hence, we can write
and passing to the limsup as in the above inequality, using (H9) and the fact that is convex and lower semicontinuous, we obtain
In addition, as as and for each , then we have from (71) that Therefore, keeping in mind (68) and (73), we deduce that is a solution of Problem 3 corresponding to f and . Since is the unique solution of Problem 3 corresponding to , we deduce that and
Thus, the weak limits are independent of the subsequences. Consequently, the entire sequences and are weakly convergent to u and respectively. Then,
Therefore, which concludes that S is demicontinuous. □
5. Well-Posedness
In this section, we use the abstract results from Section 4 in order to study the existence, the uniqueness and the dependence on the data of the weak solutions of the models described in Section 3. At the beginning of this study, our aim is to prove that Problem 1 and Problem 2 admit at least one solution, and also to discuss on the uniqueness.
Before we delve into this analysis, we prove a useful lemma.
Proof.
Let be arbitrarily fixed. Since is a linear and continuous mapping, then there exists such that
It is easy to observe that is an element of ; therefore, the set is nonempty.
Analogously, let be arbitrarily fixed. As is a linear and continuous mapping, then there exists such that
As a result, is an element of . Hence, the set is nonempty. Moreover, by using standard arguments, we deduce that and are closed and convex sets. □
The solvability of Problem 1 can be established with the help of Theorem 4 as the following result shows.
Theorem 6.
Under Assumptions 1 and 2, Problem 1 has at least one solution. If, in addition, ω and are strictly convex, then Problem 1 has a unique solution.
Proof.
In consequence, Problem 1 can be equivalently written as follows: find and such that
In the sequel, we will apply Theorem 4 with given by (80) and (81), given by (24), given by (25) and With this end in view, we have to verify (H1)–(H5).
As and , (H1) is fulfilled. To proceed, we introduce the functional
Obviously, is convex, lower semicontinuous and Gâteaux differentiable, the Gâteaux gradient in denoted by verifying
Therefore, (H2) is fulfilled. Next, by considering Assumption 1, we deduce that the functionals J and given by (80) and (81) satisfy (H3) and (H4). Finally, Lemma 1 ensures that fulfills (H5). Consequently, we can apply Theorem 4 in order to obtain the existence of at least one solution for Problem 1.
If, in addition, and are strictly convex, then the functionals J and are strictly convex. As a result, Theorem 4 ensures also the uniqueness. □
Below, we focus on Problem 2.
Theorem 7.
Under Assumptions 1 and 2, Problem 2 has at least one solution. If, in addition, ω and are strictly convex, then Problem 2 has a unique solution.
Proof.
We observe that the bifunctional given by (29) can be written as
where
and is given by (81), and then
Thus, Problem 2 can be equivalently written as follows: find and such that
Therefore, we are going to apply Theorem 4 with given by (89) and (81), given by (30), given by (31) and Thus, we have to verify (H1)–(H5).
As and (H1) is fulfilled. In order to verify (H2), we define the following functional inspired by [13] (pp. 150–152):
the functional is convex, lower semicontinuous and Gâteaux differentiable, the Gâteaux gradient in denoted by verifying
Next, we turn our attention to the question of how the weak solutions of the problems (10)–(13) (15) and (10)–(13) (16) depend on the data. With this end in view, we firstly prove the following lemma.
Proof.
We consider the case corresponding to because the case corresponding to is easier. Let and be three sequences, and let , be three elements such that
In order to prove that , we have to check the conditions in Definition 2. To start, we prove that for every sequence such that for each and in , we have .
Let be such that in as .
It holds
Let It is worth emphasizing that
We now use the fact that
(for a justification of the above inequality, see [13] (pp. 153–154)).
Hence,
Since (96) holds and is a linear and continuous map, then as
Therefore, by passing to the limit for in (99), we obtain
which concludes that
We prove now that for every , there exists a sequence such that for each and in
Let be arbitrarily fixed. Let us construct a sequence as follows: for each positive integer
where is defined in (78) and is also obtained from Riesz’s representation theorem,
We claim that for each positive integer Indeed, it is easy to observe that
On the other hand, by (102), we have
Here and everywhere below in this paper, and stand for the constants appearing in (4) and (6). Using (96) and the fact that is a linear and continuous map, we can see that and therefore, in W as As is a linear and continuous operator, see (5), then as This convergence, together with (97), (98), and (104), lead to in Analogously, it can be proved that the two conditions in Definition 2 also hold for the subset for each □
In the sequel, we consider a new assumption.
Assumption A3.
is upper semicontinuous.
Theorem 8.
We admit Assumptions 1–3, and in addition, we assume that ω and are strictly convex. The operator
associated to Problem 1 is demicontinuous.
Proof.
We are going to apply Theorem 5 with given by (80) and (81), given by (24), given by (25) and Recall that (H1)–(H5) are fulfilled (see the proof of Theorem 6). By considering Assumption 1, it follows that . Moreover, from (86), it follows that ; hence, (H6) is fulfilled too. Assumption 1 also guarantees that (23) holds, and therefore, (H7) is fulfilled. For (H8), note that
We can take Next, we prove that for each We emphasize that, due to (87), we have
Thus, we can consider the linear and continuous operator hence, (H9) is also fulfilled. Finally, Assumption 3 and Lemma 2 ensure that (H10) and (H11) hold. Therefore, we can apply Theorem 5 to conclude that the operator S associated with Problem 1 is demicontinuous. □
A similar result concerning the solution of Problem 2 can be delivered.
Theorem 9.
We admit Assumptions 1–3, and in addition, we assume that ω and are strictly convex. The operator
associated with Problem 2 is demicontinuous.
Proof.
We apply Theorem 5 with given by (89), (81), given by (30), given by (31) and As (H1)–(H5) are fulfilled (see the proof of Theorem 7), it remains to check (H6)–(H11). From the definition of in (94), it is easy to observe that it vanishes in Actually, we easily observe that (H6) and (H7) hold. Next, we examine if (H8) holds:
We can take
Keeping in mind (95), we observe that
Thus, (H9) is fulfilled with . Finally, Assumption 3 and Lemma 2 ensure that (H10) and (H11) hold. Therefore, we can apply Theorem 5 to conclude that the operator S associated with Problem 2 is demicontinuous. □
6. Conclusions
The present work is a contribution to the theory of multi-field weak solvability in continuum mechanics by means of an approach based on the theory of bipotentials.
Two contact models were addressed. For each of them, we obtained existence and uniqueness results, and we studied the dependence of the weak solution on the data. Firstly, we made an investigation in an abstract setting covering both models. Then, we applied the abstract results in order to study the well-posedness of each of the two models under consideration.
The weak formulation of the first model consists of the following variational problem: find and such that
This variational formulation is an alternative to the primal variational formulation: find such that
In the classical approach, the stress tensor has to verify a.e. in , where is the solution of the variational inequality (115).
Similarly, the weak formulation of the second model consists of the following variational problem: find and such that
This variational system is an alternative to the primal variational formulation: find such that
Thus, in the classical approach, the stress tensor has to verify a.e. in , where is the solution of the variational inequality (118).
Notice that, due to the separability property of the form b, both variational problems governed by bipotentials can be equivalently expressed in an abstract setting as follows: find such that
The unique solution can be computed by means of a minimization technique as follows: u is the unique minimizer of the functional on X and is the unique minimizer of on At this stage, it would be interesting to propose efficient algorithms in order to approximate the weak solutions. In addition, it would be of high interest to examine if the abstract theory from this paper can be applied in order to study other models.
Author Contributions
Conceptualization, A.M.; writing—original draft preparation, M.O.; writing—review and editing, A.M. and M.O.; visualization, A.M. and M.O. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schröder, J.; Iglebüscher, M.; Schwarz, A.; Starke, G. A Prange-Hellinger-Reissner type finite element formulation for small strain elasto-plasticity. Comput. Methods Appl. Mech. Eng. 2017, 317, 400–418. [Google Scholar] [CrossRef]
- Hüeber, S.; Wohlmuth, B. An optimal a priori error estimate for nonlinear multibody contact problems. SIAM J. Numer. Anal. 2005, 43, 156–173. [Google Scholar] [CrossRef]
- Hüeber, S.; Matei, A.; Wohlmuth, B. Efficient algorithms for problems with friction. SIAM J. Sci. Comput. 2007, 29, 70–92. [Google Scholar] [CrossRef]
- Matei, A.; Niculescu, C. Weak solutions via bipotentials in mechanics of deformable solids. J. Math. Anal. Appl. 2011, 379, 15–25. [Google Scholar] [CrossRef] [Green Version]
- Matei, A. A variational approach via bipotentials for unilateral contact problems. J. Math. Anal. Appl. 2013, 397, 371–380. [Google Scholar] [CrossRef]
- Matei, A. A variational approach via bipotentials for a class of frictional contact problems. Acta Appl. Math. 2014, 134, 45–59. [Google Scholar] [CrossRef]
- Matei, A.; Osiceanu, M. Two-field variational formulations for a class of nonlinear mechanical models. Math. Mech. Solids 2022. [Google Scholar] [CrossRef]
- Buliga, M.; de Saxcé, G.; Vallée, C. A variational formulation for constitutive laws described by bipotentials. Math. Mech. Solids 2013, 18, 78–90. [Google Scholar] [CrossRef] [Green Version]
- Buliga, M.; de Saxcé, G.; Vallée, C. Bipotentials for Non-monotone Multivalued Operators: Fundamental Results and Applications. Acta Appl. Math. 2010, 110, 955–972. [Google Scholar] [CrossRef] [Green Version]
- Buliga, M.; de Saxcé, G.; Vallée, C. Existence and construction of bipotentials for graphs of multivalued laws. J. Convex Anal. 2008, 15, 87–104. [Google Scholar]
- Buliga, M.; de Saxcé, G.; Vallée, C. Non-maximal cyclically monotone graphs and construction of a bipotential for the Coulomb’s dry friction law. J. Convex Anal. 2010, 17, 81–94. [Google Scholar]
- Panagiotopoulos, P.D. Inequality Problems in Mechanics and Applications. Convex and Nonconvex Energy Functions; Birkhäuser: Basel, Switzerland, 1985; pp. 83–84. [Google Scholar]
- Sofonea, M.; Matei, A. Mathematical Models in Contact Mechanics; Cambridge University Press: New York, NY, USA, 2012; pp. 29, 30, 86, 88, 89, 107–110, 150–154. [Google Scholar]
- Saramito, P. Complex fluids. Modeling and Algorithms; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Versaci, M.; Palumbo, A. Magnetorheological Fluids: Qualitative comparison between a mixture model in the Extended Irreversible Thermodynamics framework and an Herschel–Bulkley experimental elastoviscoplastic model. Int. J. Non-Linear Mech. 2020, 118, 103288. [Google Scholar] [CrossRef]
- Yilmaz, N.; Sahiner, A. Generalization of hyperbolic smoothing approach for non-smooth and non-Lipschitz functions. J. Ind. Manag. Optim. 2021. [Google Scholar] [CrossRef]
- Shi, Z.; Wang, H.; Leung, C.S.; So, H.C.; Member EURASIP. Robust MIMO radar target localization based on lagrange programming neural network. Signal Process. 2020, 174, 107574. [Google Scholar] [CrossRef]
- Nečas, J.; Hlaváček, I. Mathematical Theory of Elastic and Elastico-Plastic Bodies: An Introduction; Elsevier Scientific Publishing Company: Amsterdam, The Netherlands, 1981; p. 79. [Google Scholar]
- Migorski, S.; Ochal, A.; Sofonea, M. Nonlinear Inclusions and Hemivariational Inequalities. Models and Analysis of Contact Problems; Springer: New York, NY, USA, 2013; p. 34. [Google Scholar]
- Kurdila, A.J.; Zabarankin, M. Convex Functional Analysis; Birkhäuser Verlag: Basel, Switzerlad, 2005; pp. 180–183. [Google Scholar]
- Niculescu, C.P.; Persson, L.-E. Convex Functions and Their Applications. A Contemporary Approach; Springer: New York, NY, USA, 2006; pp. 45, 116. [Google Scholar]
- Brézis, H. Functional Analysis, Sobolev Spaces and Partial Differential Equations; Springer: New York, NY, USA, 2011; pp. 138–141. [Google Scholar]
- Struwe, M. Variational Methods. Applications to Nonlinear Partial Differential Equations and Hamiltonian Systems; Springer: Heidelberg, Germany, 1996; pp. 1–73. [Google Scholar]
- De Saxcé, G. Une généralisation de l’inégalité de Fenchel et ses applications aux lois constitutives. C. R. Acad. Sci. 1992, 314, 125–129. [Google Scholar]
- Mosco, U. Convergence of Convex Sets and of Solutions of Variational Inequalities. Adv. Math. 1969, 3, 510–585. [Google Scholar] [CrossRef] [Green Version]
- Laursen, T. Computational Contact and Impact Mechanics; Springer: Heidelberg, Germany, 2002. [Google Scholar]
- Wriggers, P. Computational Contact Mechanics; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Wriggers, P.; Laursen, T. Computational Contact Mechanics; Springer: Wien, Austria, 2007. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).