1. Introduction
The reduced-order filtering problem occupies an important place in the theory of optimal state estimation. Instead of the traditionally used Kalman filter, which forms an estimate of the total system state vector and has an order that coincides with the order of the system, it is proposed to construct its analogue, a functional filter with a reduced dimension. In this case, the computational effort to implement a functional filter is reduced. In addition, the reduced order of the filter simplifies the analysis of the dynamic system.
The problem under study is at the intersection of two classical problems of state estimation theory: the full order filtering problem for stochastic systems and the design functional observer problem for deterministic systems. The first problem relates to the filtration theory and was solved for non-linear case (even for the non-stationary case) in 1959–1960 by Stratonovich [
1,
2], and for linear case in 1960–1961 by Kalman and Bucy [
3,
4], for both continuous and discrete time. The solution to the second problem of constructing functional observers for linear stationary fully defined systems was proposed in 1966 by Luenberger [
5]. The further development of the theory of functional observers is reflected in detail in the books by O’Reilly [
6] and Korovin and Fomichev [
7]. In particular, in [
7], the conditions of existence and algorithms for the synthesis of functional observers for linear stationary fully deterministic systems are given for various cases, namely scalar and vector output; and scalar and vector functional. Two methods of solving the design functional observer problem are also proposed: the pseudo-input method and the scalar observer method. Both methods allow one to obtain necessary and sufficient conditions for the existence of functional observers of order
k (
where
is the observability index of the system), which were first proposed in [
8,
9].
Much attention has been paid to the construction of the reduced-order filters for linear systems. Minimizing the quadratic error criterion over the interval and using the solution of the two-point boundary value problem, the reduced-order filter is designed in [
10,
11]. Based on the quasi-diagonal matrix decomposition and the solution of the Riccati and Lyapunov matrix equations, a method is proposed in [
12] for determining the parameters of continuous and digital linear filters of reduced order which ensures their asymptotic stability provided that the estimated system is stabilizable and detectable. In [
13,
14,
15], the proof of the uniqueness of the optimal unbiased reduced-order filter and the properties of the reduced-order innovation process in continuous and discrete time are proposed. Developing the results obtained in [
13], the necessary and sufficient conditions for existence, stability, and convergence of the designed filter are obtained for both continuous and discrete stochastic systems in [
14], and for discrete stochastic systems with unknown inputs in [
15]. In [
16], a method for the synthesis of functional optimal observers in the frequency domain using spectral factorization in continuous and discrete time is proposed, and the transfer function of the filter and the properties of its associated innovation sequence are obtained. In [
17], using a model reduction of the original system and solving the Lyapunov equations involved in each iteration of the optimum search algorithm, a simple method for reduced-order
filter design is proposed. An approach to design a sliding mode control-based functional observer for discrete-time stochastic systems, existence conditions, and stability analysis of the proposed observer are given in [
18]. In [
19], a generalization of the classical unbiasedness condition in the joint problem of stabilization and optimal filtering is presented, and an alternative method for constructing reduced-order filters is proposed, based on reduction to a non-linear optimization problem. Conditions for existence of second-order and third-order filters for systems in continuous time with additive noises are proposed in [
20]. In [
21,
22], the frequency-weighted
-optimal model order reduction problem is investigated, and algorithms are proposed, that constructs a reduced-order model, which nearly satisfies the first-order optimality conditions.
In practice, reduced-order optimal filters are used in signal processing of inertial navigation systems, in health parameter estimation for an aircraft turbofan engine, in induction motor state estimation, in dynamic image analysis, in restoration of progressive and interlaced video, in separation of heart and respiratory sounds, in meteorology and oceanography applications (see [
23] and references therein).
This article proposes an approach to constructing reduced-order filters, which differs from the methods in [
13,
14,
15,
16] in that the filter order does not necessarily coincide with the dimension of the estimated functional. Unlike the methods in [
12,
17,
21,
22], where Lyapunov equations are used to calculate the quality criterion, this article uses the method of integral quadratic performance measures, which makes it possible to determine the dependence on parameters in an explicit form.
The problem formulation is presented in
Section 2, where the scalar linear functional of the state vector is estimated from the measured scalar output. Perturbations are white random processes with a priori known probabilistic characteristics, uncorrelated with each other at different times and with the initial state of the system. The root-mean-square error in the steady state is chosen as a criterion of optimality. In
Section 3, necessary and sufficient conditions for the existence of filters of the second and third order are obtained using canonical forms. Analytical expressions for the transfer function matrix are given in
Section 4. The dependence of the parameters number of second-order and third-order filters on the order of original system is presented.
Section 5 contains an illustrative example of comparing second and third order filters by quadratic criterion in steady state.
Section 6 summarizes the article.
The mathematical notations used in this text are listed in
Table 1.
2. Problem Statement
Consider an
n–dimensional linear discrete system with stochastic perturbations and with a scalar output:
where
is the unknown phase vector,
is the known input of the system, and
is the measured output of the system;
A,
B,
C are constant matrices of appropriate sizes,
,
are discrete uncorrelated, and zero mean white noise processes of dimensions
n and 1, respectively, with given covariance matrices
,
; the initial state
is a random variable uncorrelated with noises
,
, and has
,
. Here,
Q,
are positive semidefinite matrices; and
. These assumptions can be represented as
It is also assumed that the matrices
Q,
R,
are known a priori. The first equation in the system (
1) can be understood in the sense of the stochastic difference equation [
24].
Required based on the observation of the output
and the known input
, define an unbiased estimate
for scalar functional
with the known matrix
, providing the minimum of the steady state mean value of the squared observation error
:
3. Filter Design
Let matrix
F have the standard decomposition [
6,
7]
where
and
Then,
where
is an unknown vector to be estimated. To reconstruct it, we use an observer of order
k
where
is the phase vector of the observer;
M are constant matrices of appropriate sizes. In the second equation of the observer, the output
of the original system (
1) appears, which makes it possible to obtain an advantage in terms of the quadratic criterion over the filter without it.
Without loss of generality, we make the following standard [
6] assumptions regarding the original system (
1) and the desired filter (
4).
Assumption 1. The pair is observable and is given in the second canonical form of observability [7]where is the coefficients of the characteristic polynomial of the matrix A, i.e.,The matrix F in the canonical basis has the form: Assumption 2. The pair is observable and is given in the first canonical form of observability [7]where is the coefficients of the characteristic polynomial of the matrix N, i.e., Let us investigate the question of when linear filters of the second (
) and third (
) order can estimate the functional (
2) from the state vector. In addition, it is assumed that there is no first-order (
) filter giving an unbiased estimate for the functional (
2). Discrete-time filters of various orders starting from the first order were considered in [
25].
Theorem 1. For system (1) of order higher than the third with stochastic perturbations and filters (4) of the second and third order, giving an unbiased estimate of the functional (2) from the state vector, it is true that: (1) the necessary and sufficient conditions for the existence of a second-order filter have the formwhere the condition means that the observer (4) of the first order cannot reconstruct the unbiased estimate of the functional (2); (2) the necessary and sufficient conditions for the existence of a third-order filter have the formwhere the condition (8) for the case means that the observer (4) of the second order cannot reconstruct the unbiased estimate of the functional (2). Proof. Using the stochastic difference equations of the original system (
1) and the observer (
4), it is not difficult to obtain that the estimation error
is described by the equation
The equation for the error
has the form
Based on the known results [
6], we can conclude that the estimates
and
are unbiased for
and
, respectively, if and only if the following conditions are satisfied:
Moreover, if the matrix
N is a Schur matrix, then [
26] the observation error
in the steady state is a stationary in the wide sense random process, in which the mathematical expectation is constant, and the correlation function depends on one variable.
Both statements of the theorem are obtained in a similar way from the conditions (
12), Assumption 1 about the canonical representations of the original system (
5) and Assumption 2 about the canonical representations of the desired filter (
6). □
Remark 1. Inequalities in Formulas (7) and (9) are discrete stability constraints for the filter (4) obtained using the simplified stability criterion [27] for linear discrete systems. Remark 2. If the condition (8) is violated, then there is a set of the degenerate third-order observers whose coefficients of the characteristic polynomial according to Vieta’s formulas have the formand are located at the intersection of the domain of discrete stability of the matrix N and the solution set for the system of equationswhere are the roots of the characteristic polynomial with coefficients satisfying (7); and they are determined by the quadratic formula is a free unknown, which is chosen so that the stability conditions (9) are satisfied:and the variable a is determined according to the second statement of Theorem 1. 4. Transfer Function Matrix of the Estimation Error System
This section discusses a method for calculating the optimality criterion (
3) by interpreting [
28] the steady state root-mean-square error as
norm of the weighted transfer matrix of the estimation error system (
10) and (
11)
where the transfer function matrix
from the vector noise
to the estimation error
must be stable and can be found using the following theorem.
Theorem 2. If the conditions of Theorem 1 are satisfied, then the transfer function matrix of the estimation error system has the form(1) in which, for the case of a second-order filter:(2) in which, for the case of a third-order filter: Proof. The estimation error system (
10) and (
11) can be written as follows:
For this system, the transfer function matrix from the input
to the output
is equal to
Using Formula (
14), the necessary and sufficient existence conditions of a filter of the appropriate order from Theorem 1, and Assumption 2 on the canonical representation of the filter, we obtain both statements of Theorem 2. Moreover, the pair
is observable by Assumption 2, and the pair
is controllable by the condition
for the second-order filter and by the condition (
8) for the third-order filter. Consequently, using the properties [
29,
30] of the concept of controllability and observability, we obtain that the specified transfer function matrix is irreducible. □
Remark 3. Depending on the order n of the original system (1) and the order k of the desired filter (4), the transfer function matrix has unknown parameters indicated in Table 2. Remark 4. If the condition (8) of Theorem 1 is violated for a third-order filter, then the transfer matrix of the error system can be calculated according to the first statement of Theorem 2. There are various ways to find the optimality criterion without calculating the poles of the transfer function. Firstly, calculation
J can be reduced to the calculation of integrals
where the coefficients
depend on unknown parameters of the filter (
4) according to Theorem 2 and Remark 3. There are special formulas and tables [
31,
32,
33,
34,
35] for calculating integrals (
15).
Secondly, by bilinear transformation [
36], calculation
J can be reduced to the calculation of integrals
There are also special formulas and tables [
35,
37,
38,
39] for calculating integrals (
16).
Thirdly, a discrete Lyapunov matrix equation can be used [
40] to calculate
5. Numerical Example
This section presents a numerical example of comparing second and third order filters in terms of the asymptotic quadratic mean observation error.
We consider the system (
1) and (
2) of the fourth order, in which the matrices
C are given in the canonical form (
5) with
the matrix
B is zero matrix; the elements of the matrix
F are equal to
the probabilistic characteristics are
There is no first-order filter reconstructing the unbiased estimate of the scalar functional (
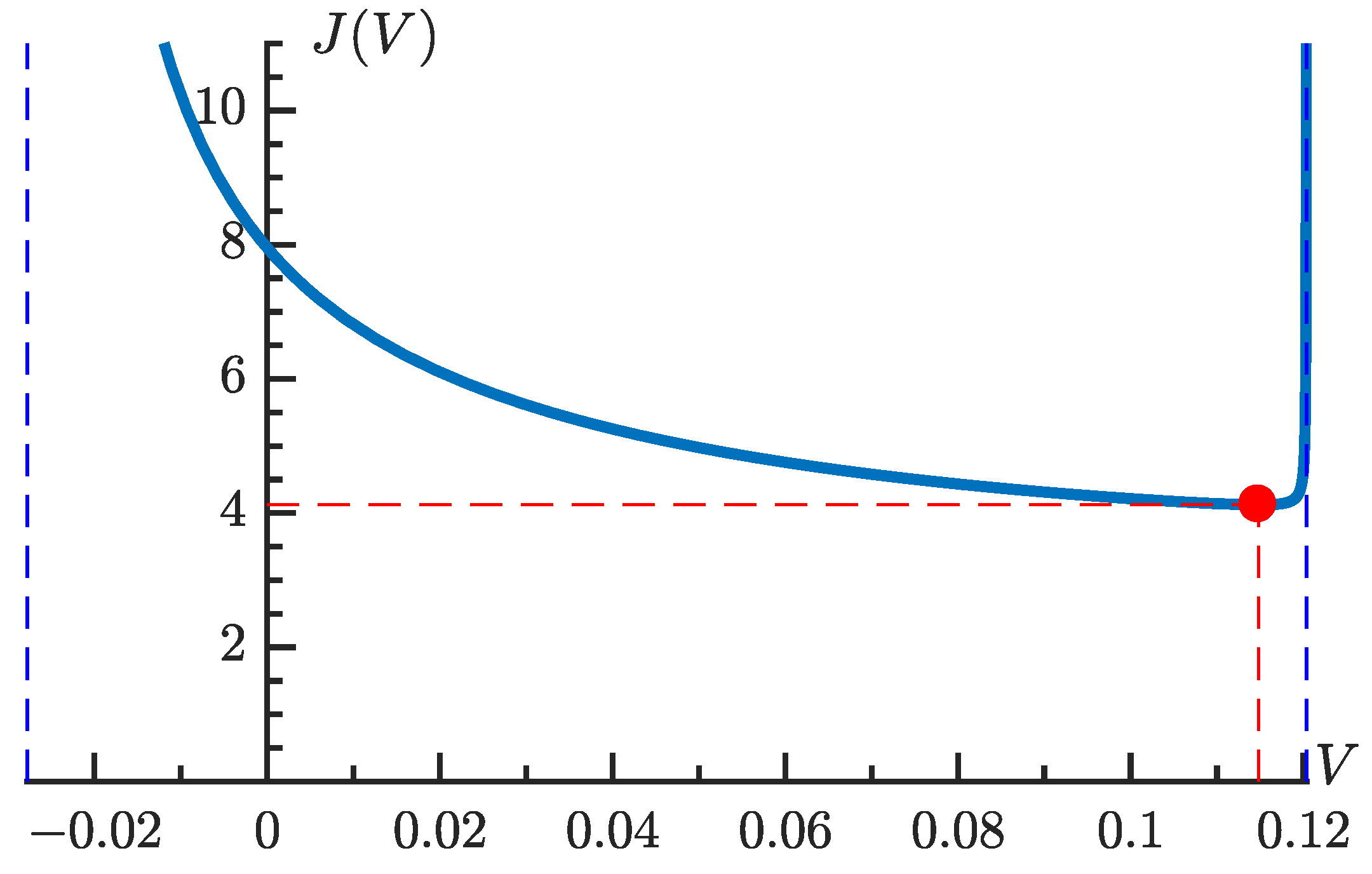
2). To find the unknown parameter (
V) of the second-order filter (
4), we solve the problem of minimizing the optimality criterion (
3), which, according to
Section 4, is
where the parameter
V must be such that the characteristic polynomial of the observer is stable, i.e.,
The function (
17) defined over the open interval
has a global minimum at
Figure 1 shows the graph of the function
The numerical values of the second-order filter matrices are
The steady state mean value of the squared observation error in this case is
If the condition (
8) is violated (
), then, by Remark 2, degenerate third-order observers have the form (
4), in which
where the unknown
is chosen so that the stability conditions (
9) are satisfied, i.e.,
According to Remark 4, the transfer function matrix and the optimality criterion in this case are found in the same way as for the second-order filter.
Therefore, if the condition (
8) is violated, then there is a set of degenerate observers whose coefficients of the characteristic polynomial
are at the intersection of the linear manifold of solutions of the system (
13) in which
and the domain of discrete stability of the matrix
If the condition (
8) is satisfied
that there exists a functional optimal observer (
4) of the third order solving the optimal filtering problem. In this case, to find unknown variables
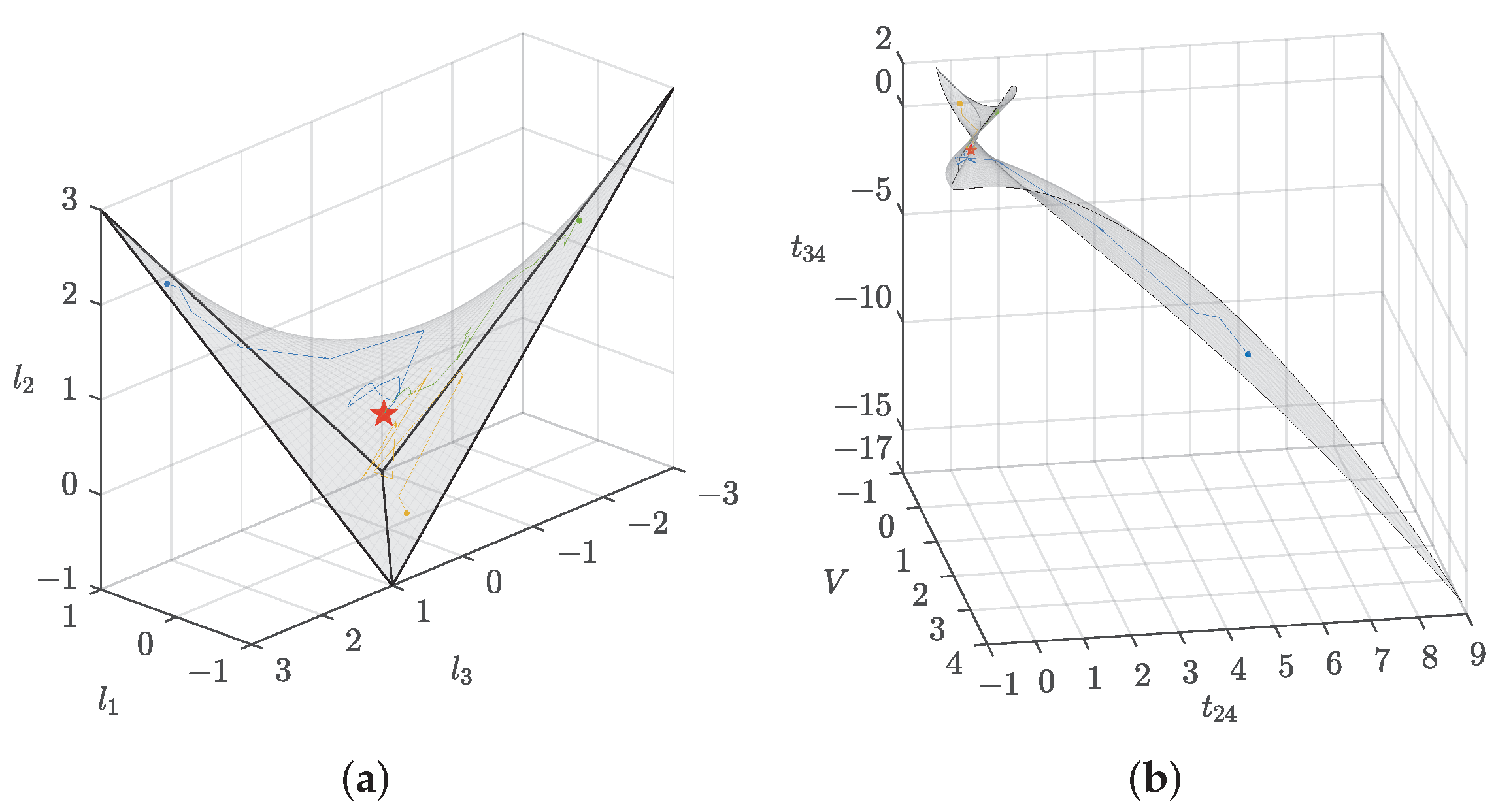
the problem of minimizing the optimality criterion is solved with a restriction on the parameters that must be such that the characteristic polynomial of the observer is stable.
Figure 2 illustrates solution of this problem in discrete stability regions given by the inequalities (
9) in coordinates
on
Figure 2a and in coordinates
on
Figure 2b. As one can see, solution paths of the sequential quadratic programming method [
41] from different starting points converge to the common minimum of the optimality criterion (
4), which has the following coordinates
The numerical values of the third-order filter matrices are
The optimality criterion in this case is
Thus, the optimality criterion (
3) for the third-order filter turned out to be less than for the second-order filter. Previously, second and third order filters were compared from both practical and theoretical points of view. In the context of satellite signal processing, it has been shown [
42] that increasing the order of the filters led to an improvement in dynamic stress performance. In [
17], a smaller value of the
norm for a third-order filter over a second-order filter was obtained on a numerical experiments. Moreover, it has recently been theoretically explained [
22] that, as the order of the reduced model was increased, the deviation in the satisfaction of the optimality conditions further reduced.






{kind=link}
{kind=link}