
A Tether System at the L1, L2 Collinear Libration Points of the Mars–Phobos System: Analytical Solutions



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
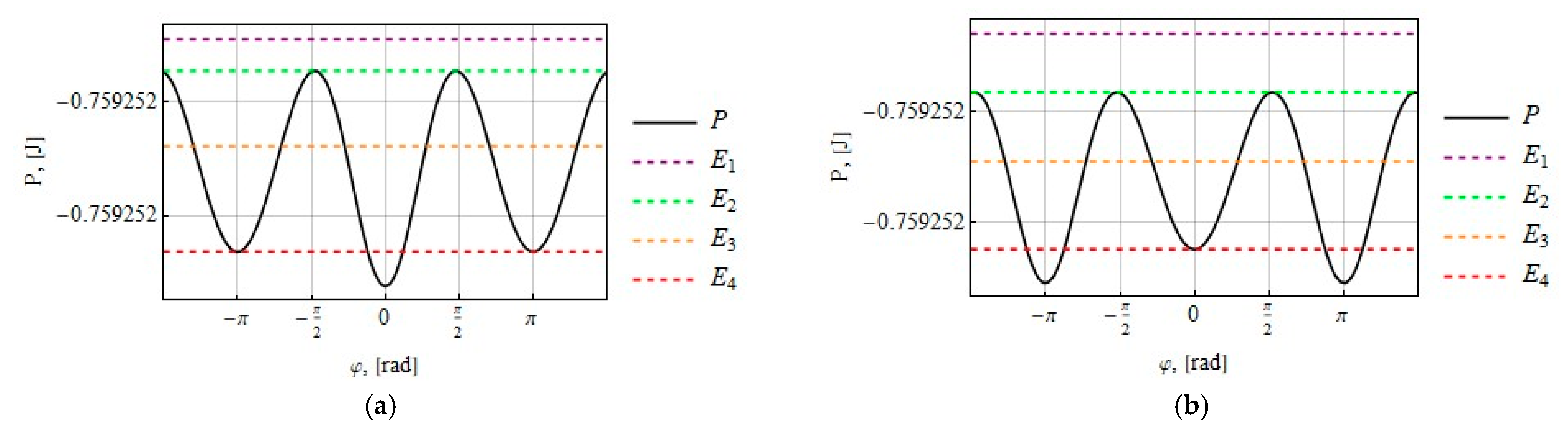
2. Mathematical Model: Finding Sustainable Positions
2.1. Tether Deflection Angle
2.2. Tether Deflection Angle
3. Approximate Analytical Solutions
3.1. Tether Deflection Angle
3.2. Tether Deflection Angle
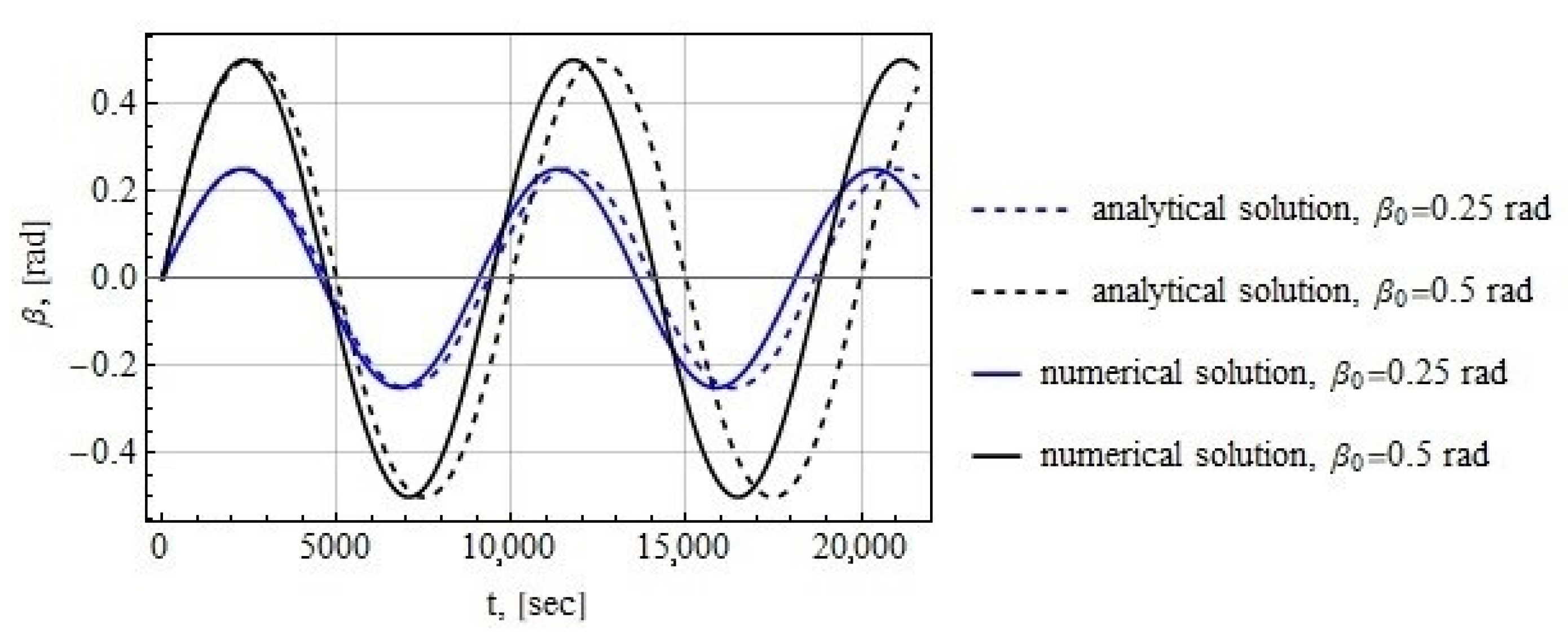
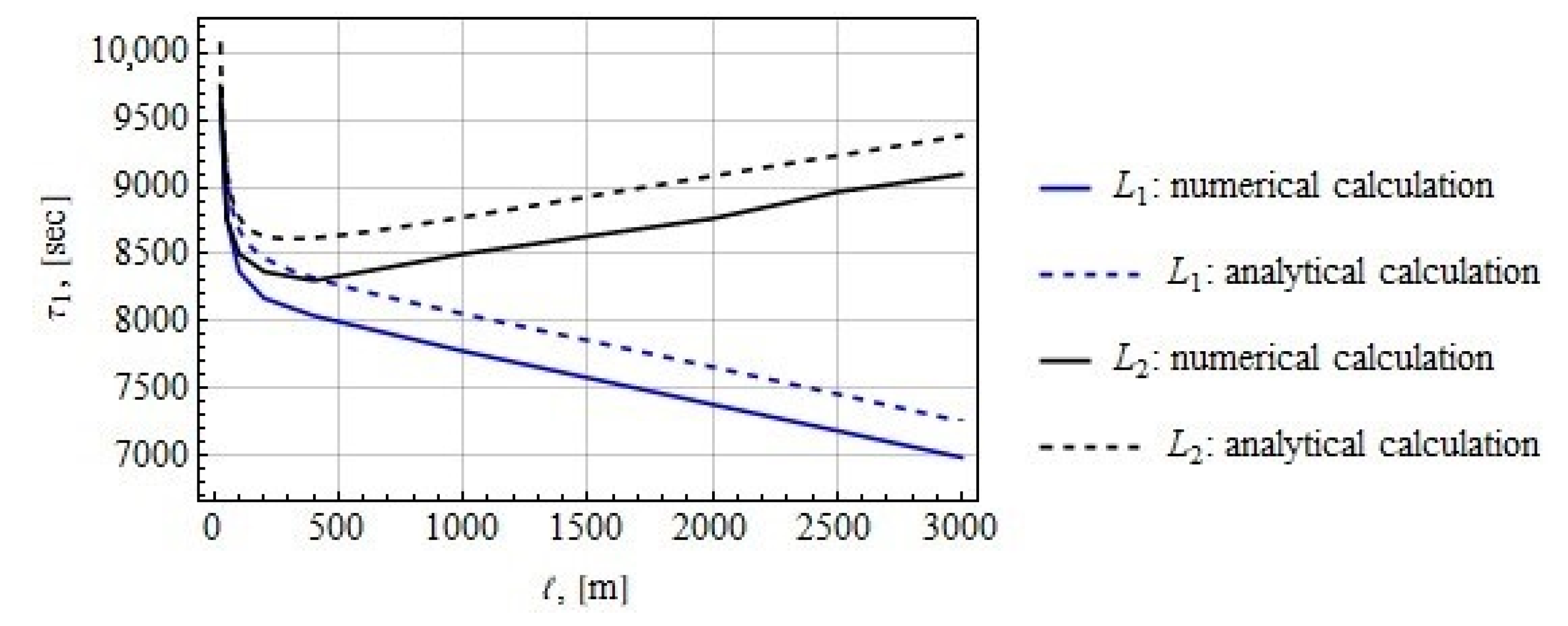
4. Oscillation Period of the Tether near the Stable Position
4.1. Tether Deflection Angle
4.2. Tether Deflection Angle
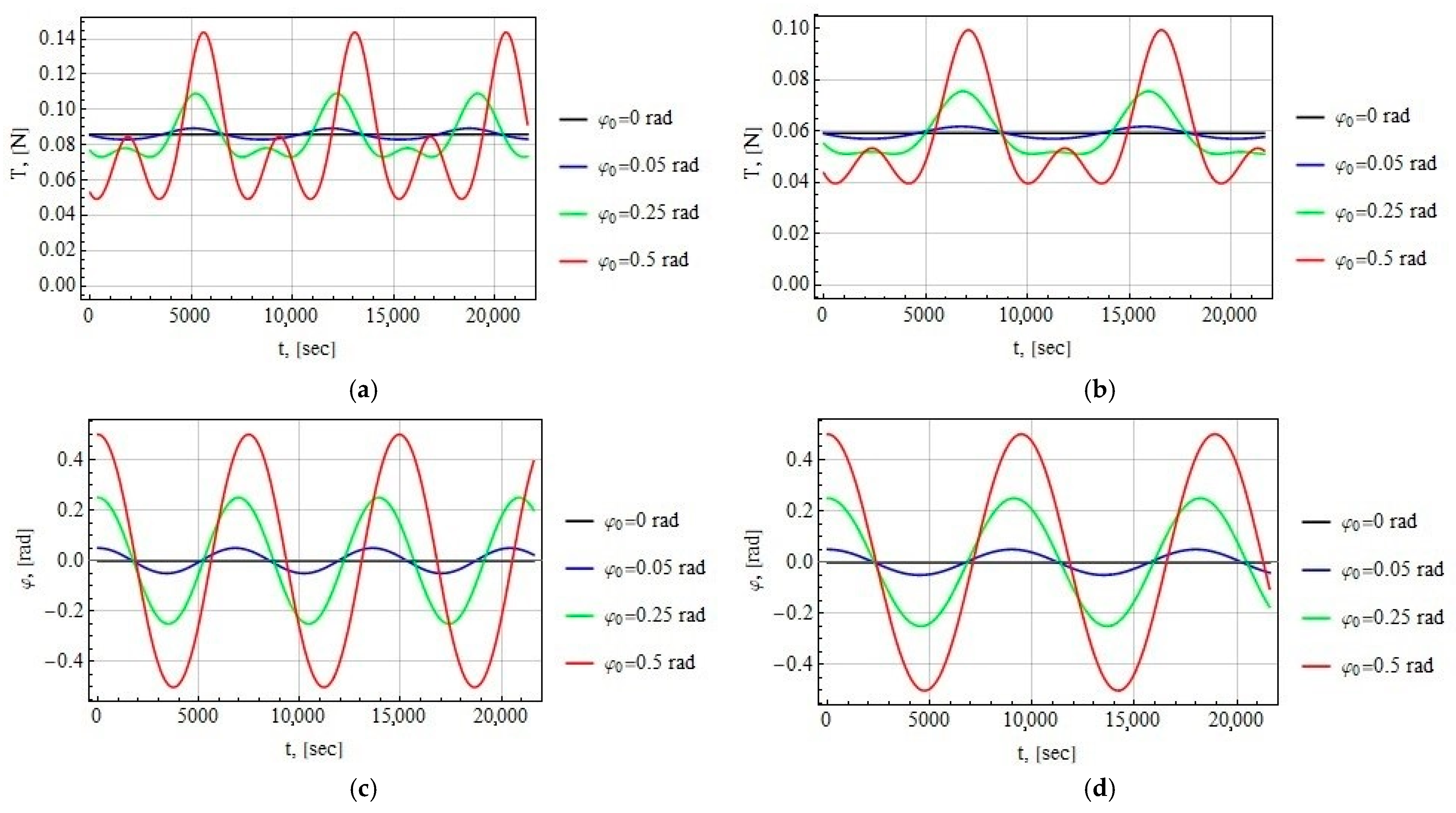
5. Tether Tension Force
5.1. Static Tension
5.2. Dynamic Tension
- The tether is stretched in all cases considered;
- The greater the amplitude of oscillation of the tether, the greater the period of oscillation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olivieri, L.; Sansone, F.; Duzzi, M.; Francesconi, A. TED Project: Conjugating Technology Development and Educational Activities. Aerospace 2019, 6, 73. [Google Scholar] [CrossRef]
- Shi, G.; Zhu, Z.H. Cooperative game-based multi-objective optimization of cargo transportation with floating partial space elevator. Acta Astronaut. 2023, 205, 110–118. [Google Scholar] [CrossRef]
- Luo, S.; Cui, N.; Wang, X.; Fan, Y.; Shi, R. Model and Optimization of the Tether for a Segmented Space Elevator. Aerospace 2022, 9, 278. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Ledkov, A.S.; Misra, A.K.; Guerman, A.D. Dynamics of Space Elevator After Tether Rupture. J. Guid. Control. Dyn. 2013, 36, 986–992. [Google Scholar] [CrossRef]
- Burov, A.A.; Guerman, A.D.; Kosenko, I.I. Tether orientation control for lunar elevator. Celest. Mech. Dyn. Astron. 2014, 120, 337–347. [Google Scholar] [CrossRef]
- Weiwei, W.; Zhigang, W.; Jiafu, L. Conceptual Design and Mechanical Analysis of a Lunar Anchored Cislunar Tether. Cosm. Res. 2023, 61, 80–89. [Google Scholar] [CrossRef]
- Ziegler, S.W.; Cartmell, M.P. Using Motorized Tethers for Payload Orbital Transfer. J. Spacecr. Rocket. 2001, 38, 904–913. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Ledkov, A.S. Swing Principle in Tether-Assisted Return Mission from an Elliptical Orbit. Aerosp. Sci. Technol. 2017, 71, 156–162. [Google Scholar] [CrossRef]
- Luo, C.; Wen, H.; Jin, D.; Xu, S. Dynamics of a flexible multi-tethered satellite formation in a Halo orbit with uncertain parameters. Commun. Nonlinear Sci. Numer. Simul. 2021, 99, 105828. [Google Scholar] [CrossRef]
- Kempton, K.; Pearson, J.; Levine, E.; Carroll, J.; Amzajerdian, F. Phase 1 Study for the Phobos L1 Operational Tether Experiment (PHLOTE). End Report. NASA 2018, 1, 1–91. Available online: https://ntrs.nasa.gov/citations/20190000916 (accessed on 1 September 2021).
- Mashayekhi, M.J.; Misra, A.K. Optimization of tether-assisted asteroid deflection. J. Guid. Control. Dyn. 2014, 37, 898–906. [Google Scholar] [CrossRef]
- Baião, M.F.; Stuchi, T.J. Dynamics of tethered satellites in the vicinity of the Lagrangian point L2 of the Earth–Moon system. Astrophys. Space Sci. 2017, 362, 134. [Google Scholar] [CrossRef]
- Wong, B.; Patil, R.; Misra, A. Attitude dynamics of rigid bodies in the vicinity of the Lagrangian points. J. Guid. Control. Dyn. 2008, 31, 252–256. [Google Scholar] [CrossRef]
- Aslanov, V.S. Dynamics of a Phobos-anchored tether near the L1 libration point. Nonlinear Dyn. 2023, 111, 1269–1283. [Google Scholar] [CrossRef]
- Niccolai, L.; Caruso, A.; Quarta, A.A.; Mengali, G. Artificial Collinear Lagrangian Point Maintenance With Electric Solar Wind Sail. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4467–4477. [Google Scholar] [CrossRef]
- Shan, M.; Shi, L. Comparison of Tethered Post-Capture System Models for Space Debris Removal. Aerospace 2022, 9, 33. [Google Scholar] [CrossRef]
- Lv, S.; Zhang, H.; Zhang, Y.; Ning, B.; Qi, R. Design of an Integrated Platform for Active Debris Removal. Aerospace 2022, 9, 339. [Google Scholar] [CrossRef]
- Huang, P.; Zhang, F.; Cai, J.; Wang, D.; Meng, Z.; Guo, J. Dexterous tethered space robot: Design, measurement, control, and experiment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1452–1468. [Google Scholar] [CrossRef]
- Feng, G.; Zhang, C.; Zhang, H.; Li, W. Theoretical and Experimental Investigation of Geomagnetic Energy Effect for LEO Debris Deorbiting. Aerospace 2022, 9, 511. [Google Scholar] [CrossRef]
- Bourabah, D.; Field, L.; Botta, E.M. Estimation of uncooperative space debris inertial parameters after tether capture. Acta Astronaut. 2023, 202, 909–926. [Google Scholar] [CrossRef]
- Zhang, F.; Sharf, I.; Misra, A.; Huang, P. On-line estimation of inertia parameters of space debris for its tether-assisted removal. Acta Astronaut. 2015, 107, 150–162. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Yudintsev, V.V. Chaos in Tethered Tug–Debris System Induced by Attitude Oscillations of Debris. J. Guid. Control. Dyn. 2019, 42, 1630–1637. [Google Scholar] [CrossRef]
- Huang, P.; Zhang, F.; Chen, L.; Meng, Z.; Zhang, Y.; Liu, Z.; Hu, Y. A review of space tether in new applications. Nonlinear Dyn. 2018, 94, 1–19. [Google Scholar] [CrossRef]
- Cartmell, M.P.; McKenzie, D.J. A Review of Space Tether Research. Prog. Aerosp. Sci. 2008, 44, 1–21. [Google Scholar] [CrossRef]
- Shi, G.; Zhu, Z.H. Adaptive Anti-Saturation Prescribed-Time Control for Payload Retrieval of Tethered Space System. IEEE Trans. Aerosp. Electron. Syst. 2023, 99, 1–11. [Google Scholar] [CrossRef]
- Salazar, F.J.T.; Prado, A.B.A. Deployment and Retrieval Missions from Quasi-Periodic and Chaotic States under a Non-Linear Control Law. Symmetry 2022, 14, 1381. [Google Scholar] [CrossRef]
- Salazar, F.J.; Prado, A.F. Suppression of Chaotic Motion of Tethered Satellite Systems Using Tether Length Control. J. Guid. Control. Dyn. 2022, 45, 580–586. [Google Scholar] [CrossRef]
- Misra, A.K.; Modi, V.J. Deployment and Retrieval of Shuttle Supported Tethered Satellites. J. Guid. Control. Dyn. 1982, 5, 278–285. [Google Scholar] [CrossRef]
- Xu, S.; Sun, G.; Ma, Z.; Li, X. Fractional-order fuzzy sliding mode control for the deployment of tethered satellite system under input saturation. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 747–756. [Google Scholar] [CrossRef]
- Ma, Z.; Huang, P. Discrete-Time Sliding Mode Control for Deployment of Tethered Space Robot With Only Length and Angle Measurement. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 585–596. [Google Scholar] [CrossRef]
- Kang, J.; Zhu, Z.H.; Santaguida, L.F. Analytical and Experimental Investigation of Stabilizing Rotating Uncooperative Target by Tethered Space Tug. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2426–2437. [Google Scholar] [CrossRef]
- Kang, J.; Zhu, Z.H. Passivity-Based Model Predictive Control for Tethered Despin of Massive Space Objects by Small Space Tug. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 1239–1248. [Google Scholar] [CrossRef]
- Ismail, N.A.; Cartmell, M.P. Three dimensional dynamics of a flexible Motorised Momentum Exchange Tether. Acta Astronaut. 2016, 120, 87–102. [Google Scholar] [CrossRef]
- Chen, S.; Chen, W.; Chen, T.; Kang, J. In-Plane Libration Suppression of a Two-Segment Tethered Towing System. Aerospace 2023, 10, 286. [Google Scholar] [CrossRef]
- Kim, M.; Hall, C.D. Control of a rotating variable-length tether system. J. Guid. Control. Dyn. 2004, 27, 849–858. [Google Scholar] [CrossRef]
- Singh, S.; Junkins, J.; Anderson, B.; Taheri, E. Eclipse-conscious transfer to lunar gateway using ephemeris-driven terminal coast arcs. J. Guid. Control. Dyn. 2021, 44, 1972–1988. [Google Scholar] [CrossRef]
- Aslanov, V.S. Prospects of a tether system deployed at the L1 libration point. Nonlinear Dyn. 2021, 106, 2021–2033. [Google Scholar] [CrossRef]
- Szebehely, V. The Restricted Problem of Three Bodies; Academic Press: New York, NY, USA, 1967; 668p. [Google Scholar]
- Koon, W.S.; Lo, M.W.; Marsden, J.E.; Ross, S.D. Dynamical Systems, the Three-Body Problem and Space Mission Design; Springer: New York, NY, USA, 2011; 327p. [Google Scholar]
- Schaub, H.; Junkins, J.L. Analytical Mechanics of Space Systems; Aiaa: San Diego, CA, USA, 2003; 819p. [Google Scholar]
- Roy, A.E. Orbital Motion; CRC Press: Boca Raton, FL, USA, 2020; 505p. [Google Scholar]
- Kluever, C.A. Space Flight Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2018; 583p. [Google Scholar]
- Janke, E.; Emde, F.; Losch, F. Tafeln Hoherer Funktionen; BG Teubner Verlagsgeselschaft: Leipzig, Germany, 1960; 322p. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aslanov, V.S.; Neryadovskaya, D.V. A Tether System at the L1, L2 Collinear Libration Points of the Mars–Phobos System: Analytical Solutions. Aerospace 2023, 10, 541. https://doi.org/10.3390/aerospace10060541
Aslanov VS, Neryadovskaya DV. A Tether System at the L1, L2 Collinear Libration Points of the Mars–Phobos System: Analytical Solutions. Aerospace. 2023; 10(6):541. https://doi.org/10.3390/aerospace10060541
Chicago/Turabian StyleAslanov, Vladimir S., and Daria V. Neryadovskaya. 2023. "A Tether System at the L1, L2 Collinear Libration Points of the Mars–Phobos System: Analytical Solutions" Aerospace 10, no. 6: 541. https://doi.org/10.3390/aerospace10060541
APA StyleAslanov, V. S., & Neryadovskaya, D. V. (2023). A Tether System at the L1, L2 Collinear Libration Points of the Mars–Phobos System: Analytical Solutions. Aerospace, 10(6), 541. https://doi.org/10.3390/aerospace10060541